
Extended State Observer-Based Sliding-Mode Control for Aircraft in Tight Formation Considering Wake Vortices and Uncertainty


Abstract
:1. Introduction
- A mathematical model of the wake vortex was established, and the flight characteristics of two UAVs were calculated using Xflow software(The version number of the software is 2020x), which confirmed that the established mathematical model was relatively accurate.
- A sliding mode controller based on an extended state observer was designed, through which tight-formation flights were accurately controlled.
- Numerical simulations with the designed controller were conducted in MATLAB, and an experiment was conducted on a semi-physical platform, to verify the feasibility and reliability of the designed controller.
2. Aerodynamic Modeling of Close-Formation UAVs
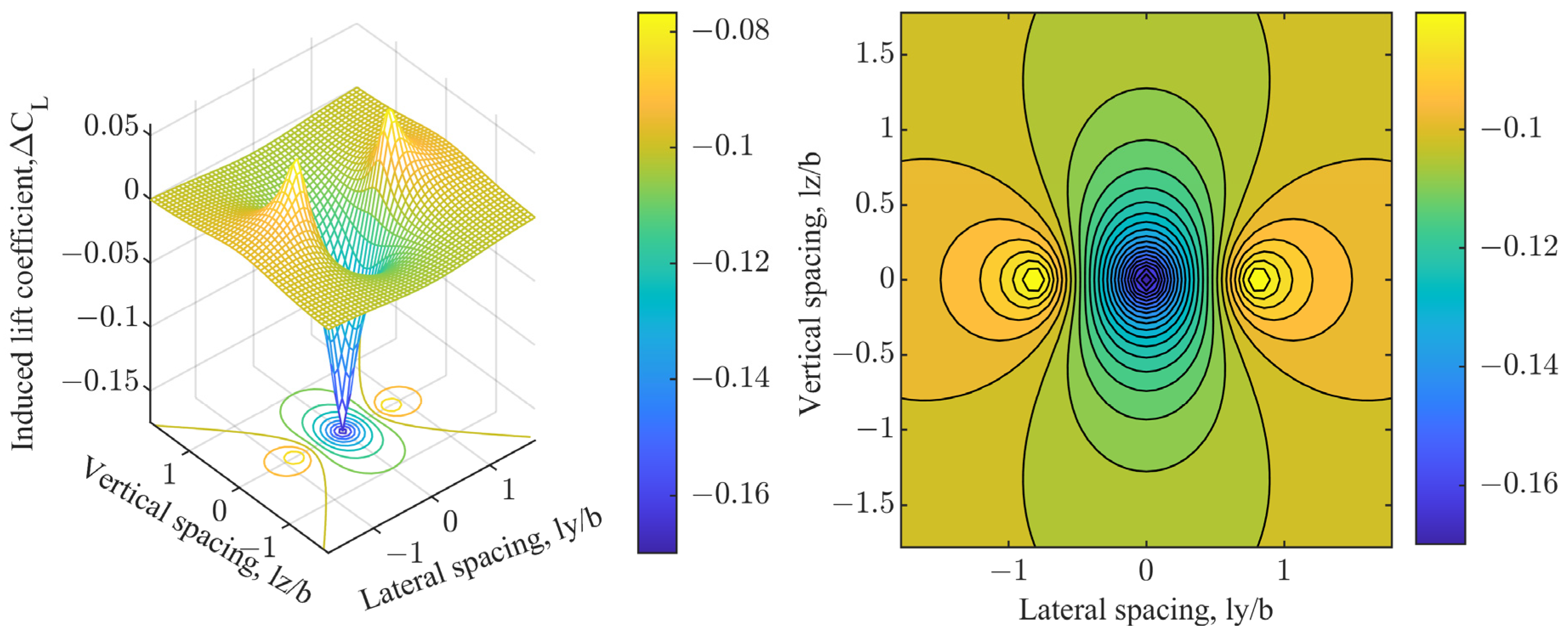
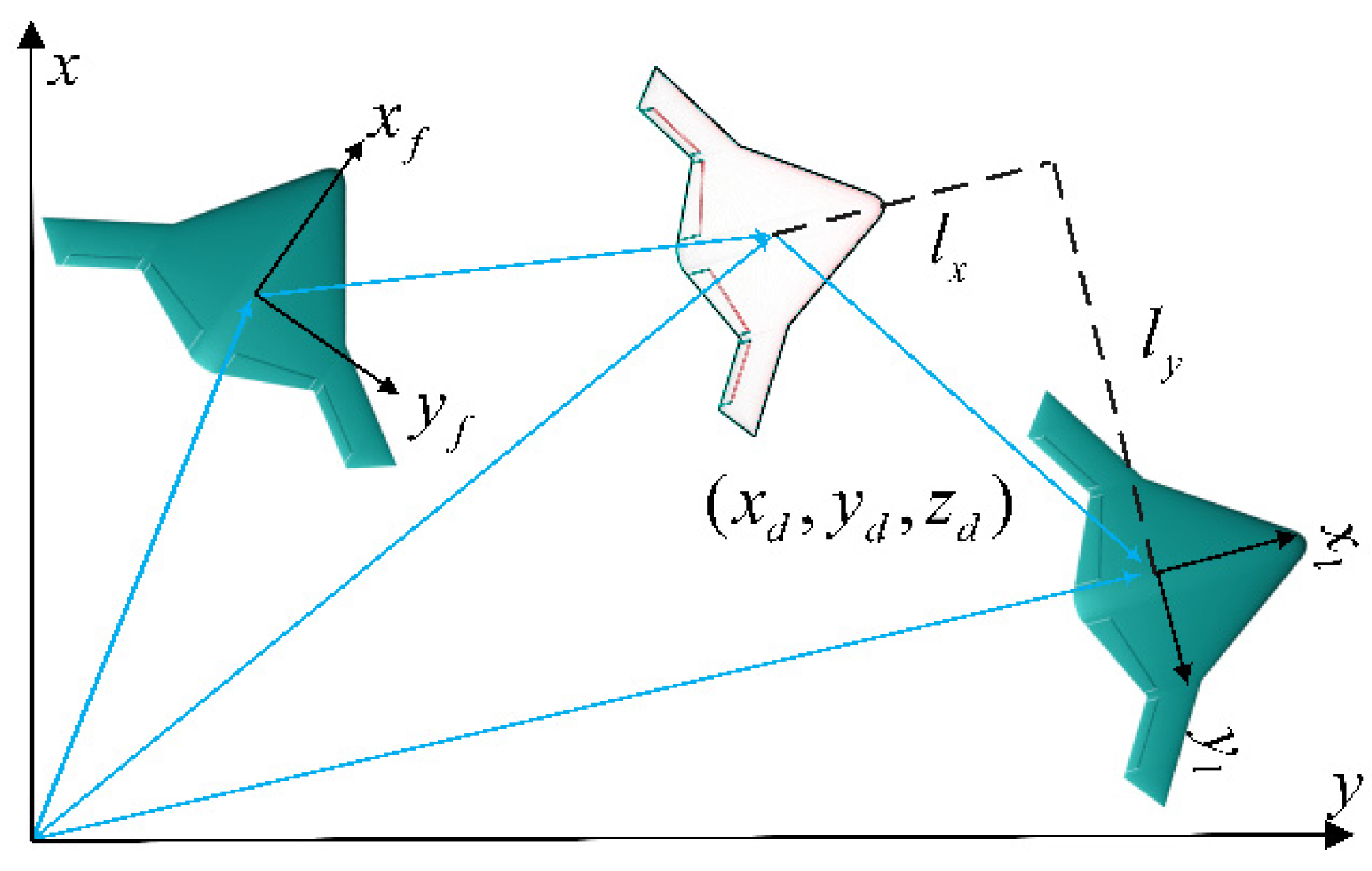
2.1. Vortex Mathematical Modeling
2.2. XFlow Software Calculation
3. Design of Tight Formation Controller
3.1. Design of Extended State Observer
3.2. Design of Sliding Mode Controller
4. Simulation and Experimental Verification
4.1. Numerical Simulation
4.2. Experiments with Semi-physical Simulation Platform
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Γ0 | Vortex circulation |
| Lift coefficient of the leader | |
| The position coordinates of the leading aircraft | |
| The position coordinates of the following aircraft | |
| The bank, flight path, and heading angles | |
| The induced wake velocity | |
| S | Wing area |
| b | Wing span |
| Mean aerodynamic chord | |
| m | Gross mass |
| Ix | Roll moment of inertia |
| Iy | Pitch moment of inertia |
| Iz | Yaw moment of inertia |
| Ixz | Product moment of inertia |
References
- Li, W.-H.; Shi, J.-P.; Wu, Y.-Y.; Wang, Y.-P.; Lyu, Y.-X. A Multi-UCAV cooperative occupation method based on weapon engagement zones for beyond-visual-range air combat. Def. Technol. 2022, 18, 1006–1022. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H.T. Aerodynamic model-based robust adaptive control for close formation flight. Aerosp. Sci. Technol. 2018, 79, 5–16. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H. Robust Design of Close Formation Flight Control via Uncertainty and Disturbance Estimator. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Frew, E.W.; Lawrence, D.A.; Morris, S. Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields. J. Guid. Control Dyn. 2008, 31, 290–306. [Google Scholar] [CrossRef]
- Hansen, J.L.; Cobleigh, B.R. Induced Moment Effects of Formation Flight Using Two F/A-18 Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Zheng, R.; Shi, J.; Qu, X. Modeling, Simulation and Control of Close Formation Flight. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 3902–3907. [Google Scholar]
- Saban, D.; Whidborne, J.F.; Cooke, A.K. Simulation of wake vortex effects for UAVs in close formation flight. Aeronaut. J.-New Ser. 2009, 113, 727–738. [Google Scholar] [CrossRef]
- Lissaman, P.B.; Shollenberger, C.A. Formation flight of birds. Science 1970, 168, 1003–1005. [Google Scholar] [CrossRef] [PubMed]
- Cutts, C.J.; Speakman, J.R. Energy Savings in Formation Flight of Pink-Footed Geese. J. Exp. Biol. 1994, 189, 251–261. [Google Scholar] [CrossRef] [PubMed]
- Rayner, J. Estimating power curves of flying vertebrates. J. Exp. Biol. 1999, 202, 3449–3461. [Google Scholar] [CrossRef] [PubMed]
- Weimerskirch, H.; Martin, J.; Clerquin, Y.; Alexandre, P.; Jiraskova, S. Energy saving in flight formation. Nature 2001, 413, 697–698. [Google Scholar] [CrossRef] [PubMed]
- Cho, H.; Han, C. Effect of sideslip angle on the aerodynamic characteristics of a following aircraft in close formation flight. J. Mech. Sci. Technol. 2015, 29, 3691–3698. [Google Scholar] [CrossRef]
- Vachon, M.J.; Ray, R.J.; Walsh, K.R.; Ennix, K. F/A-18 Performance Benefits Measured during the Autonomous Formation Flight Project; Armstrong Flight Research Center: Edwards Air Force Base, CA, USA, 2013. [Google Scholar]
- Vicroy, D.; Vijgen, P.; Reimer, H.; Gallegos, J.; Spalart, P. Recent NASA wake-vortex flight tests, flow-physics database and wake-development analysis. In Proceedings of the AIAA and SAE, 1998 World Aviation Conference, Anaheim, CA, USA, 28–30 September 1998. [Google Scholar]
- Kent, T.E.; Richards, A.G. Analytic approach to optimal routing for commercial formation flight. J. Guid. Control Dyn. 2015, 38, 1872–1884. [Google Scholar] [CrossRef]
- Pahle, J.; Berger, D.; Venti, M.; Duggan, C.; Faber, J.; Cardinal, K. An initial flight investigation of formation flight for drag reduction on the C-17 aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4802. [Google Scholar]
- Bieniawski, S.R.; Rosenzweig, S.; Blake, W.B. Summary of flight testing and results for the formation flight for aerodynamic benefit program. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; p. 1457. [Google Scholar]
- Hanson, C.E.; Pahle, J.; Reynolds, J.R.; Andrade, S.; Nelson, B. Experimental measurements of fuel savings during aircraft wake surfing. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3560. [Google Scholar]
- Okolo, W.; Dogan, A.; Blake, W. Effect of trail aircraft trim on optimum location in formation flight. J. Aircr. 2015, 52, 1201–1213. [Google Scholar] [CrossRef]
- Zhang, Q.; Pan, W.; Reppa, V. Model-reference reinforcement learning for collision-free tracking control of autonomous surface vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 8770–8781. [Google Scholar] [CrossRef]
- Blake, W.B.; Gingras, D.R. Comparison of Predicted and Measured Formation Flight Interference Effects. J. Aircr. 2004, 41, 201–207. [Google Scholar] [CrossRef]
- Ray, R.; Cobleigh, B.; Vachon, M.; St. John, C. Flight Test Techniques used to Evaluate Performance Benefits During Formation Flight. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002.
- Wilson, D.B.; Goktogan, A.H.; Sukkarieh, S. A Vision Based Relative Navigation Framework for Formation Flight. In Proceedings of the 2014 IEEE International Conference on Robotics & Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Zheng, R.; Lyu, Y. Nonlinear tight formation control of multiple UAVs based on model predictive control. Def. Technol. 2023, 25, 69–75. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H.T. Robust Nonlinear Close Formation Control of Multiple Fixed-Wing Aircraft. J. Guid. Control Dyn. 2021, 44, 572–586. [Google Scholar] [CrossRef]
- Pachter, M.; D’Azzo, J.J.; Proud, A.W. Tight formation flight control. J. Guid. Control Dyn. 2001, 24, 246–254. [Google Scholar] [CrossRef]
- Binetti, P.; Ariyur, K.B.; Krstic, M.; Bernelli, F. Formation flight optimization using extremum seeking feedback. J. Guid. Control Dyn. 2003, 26, 132–142. [Google Scholar] [CrossRef]
- Chichka, D.F.; Speyer, J.L.; Fanti, C.; Park, C.G. Peak-seeking control for drag reduction in formation flight. J. Guid. Control Dyn. 2006, 29, 1221–1230. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H.T. UDE-Based Robust Command Filtered Backstepping Control for Close Formation Flight. IEEE Trans. Ind. Electron. 2018, 65, 8818–8827. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H. Robust cooperative close formation flight control of multiple unmanned aerial vehicles. In Proceedings of the Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)-CSME International Congress 2018, Toronto, ON, Canada, 27–30 May 2018; Springer: Cham, Switzerland, 2019; pp. 61–74. [Google Scholar]
- Ren, C.; Li, X.; Yang, X.; Ma, S. Extended state observer-based sliding mode control of an omnidirectional mobile robot with friction compensation. IEEE Trans. Ind. Electron. 2019, 66, 9480–9489. [Google Scholar] [CrossRef]
- Ding, S.; Hou, Q.; Wang, H. Disturbance-observer-based second-order sliding mode controller for speed control of PMSM drives. IEEE Trans. Energy Convers. 2022, 38, 100–110. [Google Scholar] [CrossRef]
- Proctor, F.; Hamilton, D.; Han, J. Wake vortex transport and decay in ground effect-Vortex linking with the ground. In Proceedings of the 38th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2000; p. 757. [Google Scholar]
- Proctor, F. Numerical simulation of wake vortices measured during the Idaho Falls and Memphis field programs. In Proceedings of the 14th Applied Aerodynamics Conference, New Orleans, LA, USA, 17–20 June 1996; p. 2496. [Google Scholar]
- Polycarpou, M.M.; Ioannou, P.A. A robust adaptive nonlinear control design. In Proceedings of the 1993 American Control Conference, San Francisco, CA, USA, 2–4 June 1993; pp. 1365–1369. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Velocity | 27.8 | m/s |
| Mach number | 0.082 | |
| Reynolds number | 827,600 | |
| Particle resolution (Far field) | 1.28 | m |
| Particle resolution (Near field) | 0.0025 | m |
| Reference area | 0.11175 | m2 |
| Simulation time | 0.06 | s |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Wing area | S | 1.546 | m2 |
| Wing span | b | 2.808 | m |
| Mean aerodynamic chord | 0.78 | m | |
| Gross mass | m | 15 | kg |
| Roll moment of inertia | Ix | 2.369 | Kg·m2 |
| Pitch moment of inertia | Iy | 1.211 | Kg·m2 |
| Yaw moment of inertia | Iz | 3.522 | Kg·m2 |
| Product moment of inertia | Ixz | 0.022 | Kg·m2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, R.; Zhu, Q.; Huang, S.; Du, Z.; Shi, J.; Lyu, Y. Extended State Observer-Based Sliding-Mode Control for Aircraft in Tight Formation Considering Wake Vortices and Uncertainty. Drones 2024, 8, 165. https://doi.org/10.3390/drones8040165
Zheng R, Zhu Q, Huang S, Du Z, Shi J, Lyu Y. Extended State Observer-Based Sliding-Mode Control for Aircraft in Tight Formation Considering Wake Vortices and Uncertainty. Drones. 2024; 8(4):165. https://doi.org/10.3390/drones8040165
Chicago/Turabian StyleZheng, Ruiping, Qi Zhu, Shan Huang, Zhihui Du, Jingping Shi, and Yongxi Lyu. 2024. "Extended State Observer-Based Sliding-Mode Control for Aircraft in Tight Formation Considering Wake Vortices and Uncertainty" Drones 8, no. 4: 165. https://doi.org/10.3390/drones8040165
APA StyleZheng, R., Zhu, Q., Huang, S., Du, Z., Shi, J., & Lyu, Y. (2024). Extended State Observer-Based Sliding-Mode Control for Aircraft in Tight Formation Considering Wake Vortices and Uncertainty. Drones, 8(4), 165. https://doi.org/10.3390/drones8040165