Ballistic Penetration Analysis of Soft Laminated Composites Using Sublaminate Mesoscale Modeling


Abstract
:1. Introduction
2. Materials and Methods
2.1. Material System
2.1.1. Mechanical Properties of Dyneema HB26
2.1.2. Non-Linear Stress–Strain Relation in Tension and Shear
2.2. Experimental Procedure and Results
2.3. Method of Analyses (The Proposed Model)
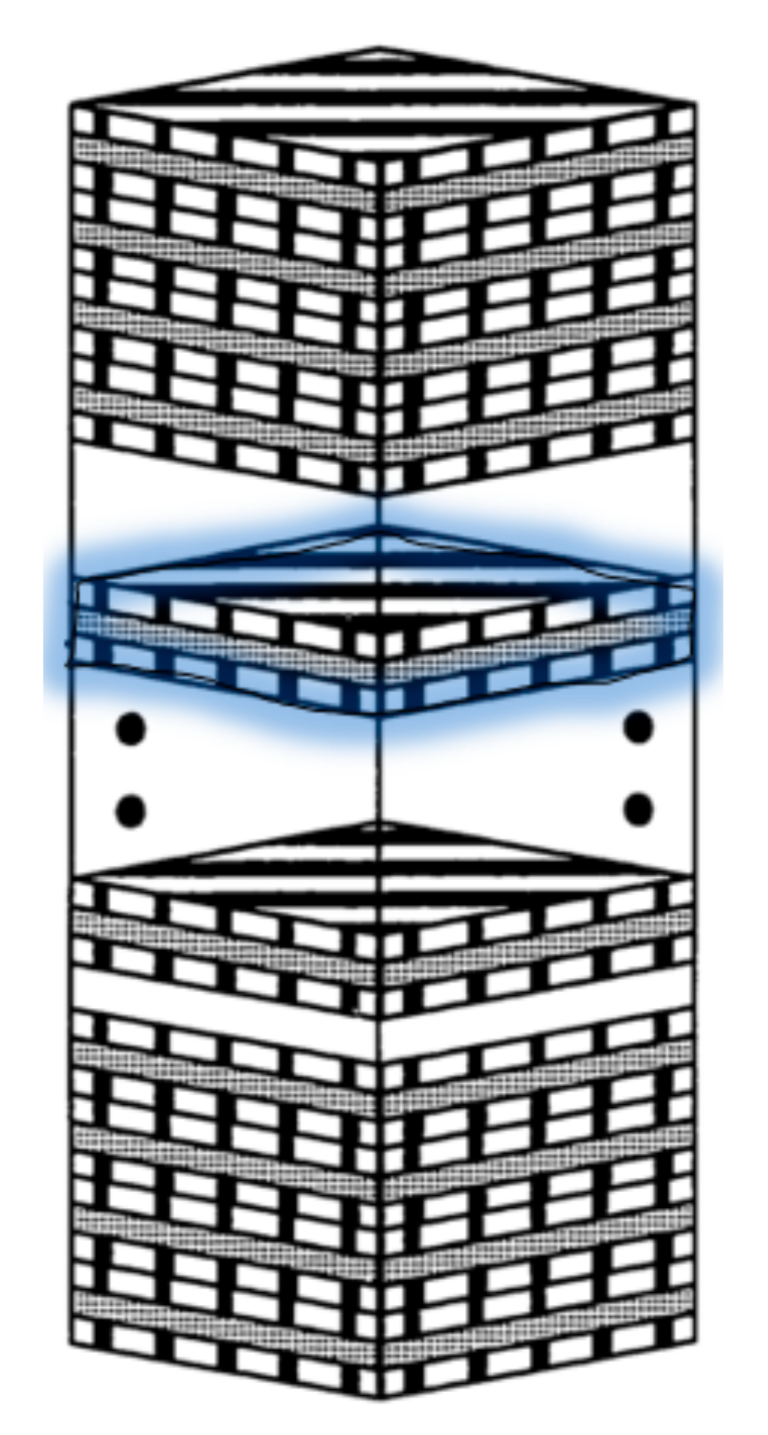
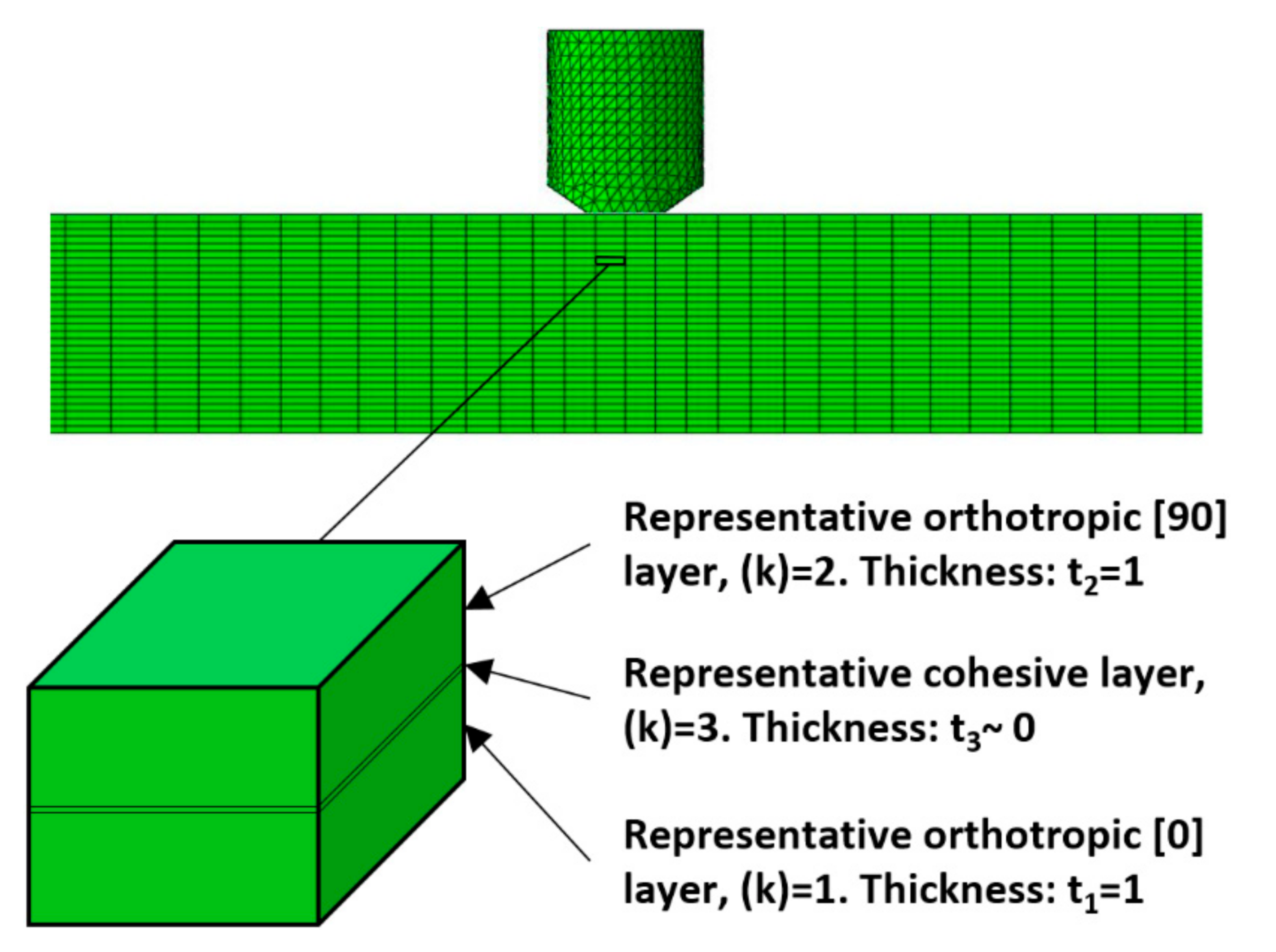
2.3.1. The Sublaminate Model
2.3.2. The Model’s Structure
2.3.3. The Sublaminate Mathematical Formulation
Perfect Bonding Conditions
Partial Inversion—The ABD Matrix
Effective Sublaminate Properties
2.4. The Model’s Failure Criteria
2.4.1. Distributed Delamination
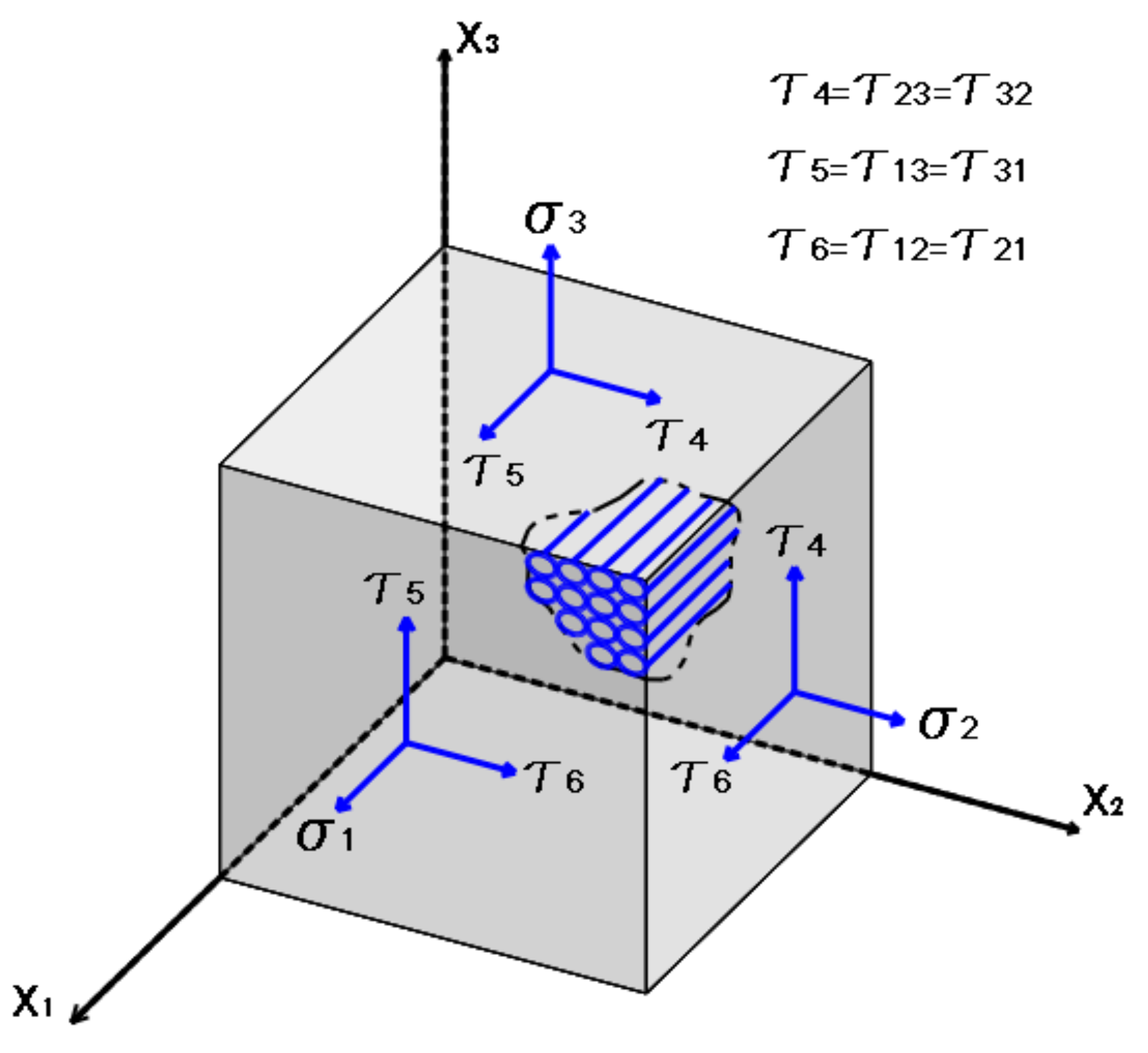
2.4.2. Tsai–Wu Failure Criterion for Anisotropic Materials
- •
- •
- •
2.4.3. Implementation of the Tsai–Wu Failure Criteria on the Sublaminate Model
- Delamination—It has been identified as a leading energy absorption mechanism of the Dyneema composite, especially under ballistic impacts. After inspecting the data presented by the SDV, the delamination failure term (local failure—for element’s elimination) is:The first term in Equation (19) accounts for a total failure according to the Tsai–Wu polynomial. The second term accounts for the failure only under the condition of positive ultimate normal stresses, as these tend to separate the adjacent layers.
- Fiber tension—a major energy absorption mechanism is included in the tensile straining of fibers. In addition to the fact that composites possess high tensile energy absorbing capabilities, fibers that suffer high tensile straining directly under the impacting projectile tend to tear. The local tensile failure term (for element’s elimination) is:If the values of and are greater than for both UD layers, local tensile failure has been achieved and the element is eliminated.
- First incident shear tearing—high OP pressure inflicted on the first impacted layers by the projectile, tear these layers and allow the projectile to penetrate through the plate, thus keeping the damage localized. This mode occurs in the first stage of the projectile’s impact when it possesses high kinetic energy causing early element deletion.The relevant term for this failure mode is defined byThis mode of failure requires a combination of local Tsai–Wu ultimate state and ultimate OP shear stresses, or .
2.5. FE Structural Implementation
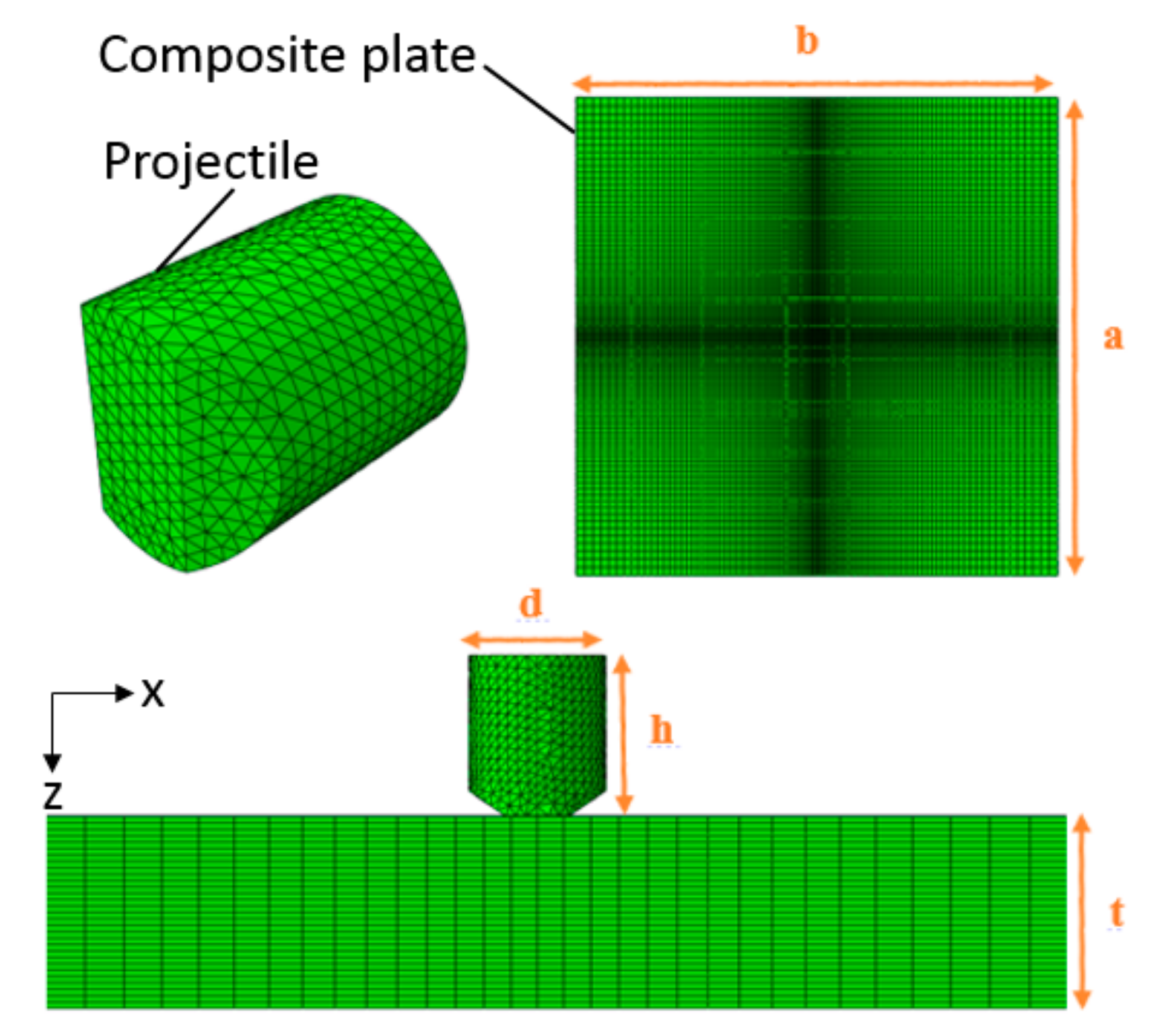
2.5.1. Ballistic Impact Simulation
2.5.2. Success Parameter of the Model
3. Results and Discussion
3.1. Parametric Study
3.1.1. Parametric Study: Changing Xt
3.1.2. Parametric Study: Changing Yc
3.2. Predictions of the Calibrated Model
3.3. Post-Impact Comparison
3.4. Success Parameter Calculation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Dhandapani, K. Experimental Investigation and Development of a Constitutive Model for Ultra High Molecular Weight Polyethylene Materials. Ph.D. Thesis, Arizona State University, Tempe, AZ, USA, 2009. [Google Scholar]
- Iannucci, L.; Pope, D. High velocity impact and armour design. Express Polym. Lett. 2011, 5, 262–272. [Google Scholar] [CrossRef]
- Cunniff, P.M. A Semiempirical Model for the Ballistic Impact Performance of Textile-Based Personnel Armor. Text. Res. J. 1996, 66, 45–58. [Google Scholar] [CrossRef]
- Sharma, N.; Carr, D.; Kelly, P.; Viney, C. Modelling and Experimental Investigation into the Ballistic Behaviour of an Ultra High Molecular Weight Polyethylene/Thermoplastic Rubber Matrix Composite. In Proceedings of the 12th International Conference on Composite Materials (ICCM-12), Paris, France, 1 July 1999; p. 1. [Google Scholar]
- Heisserer, U.; Van der Werff, H. The relation between Dyneema® fiber properties and ballistic protection performance of its fiber composites. In Proceedings of the 15th International Conference on Deformation, Yield and Fracture of Polymers, Kerkrade, The Netherlands, 1–5 April 2012; Volume 3, pp. 242–246. [Google Scholar]
- Mines, R.A.W.; Gibson, A.G. High velocity perforation behaviour of polymer composite laminates. Int. J. Impact Eng. 1998, 21, 855–879. [Google Scholar] [CrossRef]
- Ćwik, T.K.; Iannucci, L.; Curtis, P.; Pope, D. Investigation of the ballistic performance of ultra high molecular weight polyethylene composite panels. Compos. Struct. 2016, 149, 197–212. [Google Scholar] [CrossRef] [Green Version]
- Morye, S.S.; Hine, P.J.; Duckett, R.A.; Carr, D.J.; Ward, I.M. Modelling of the energy absorption by polymer composites upon ballistic impact. Compos. Sci. Technol. 2000, 60, 2631–2642. [Google Scholar] [CrossRef]
- Meshi, I.; Amarilio, I.; Benes, D.; Haj-Ali, R. Delamination behavior of UHMWPE soft layered composites. Compos. Part B Eng. 2016, 98, 166–175. [Google Scholar] [CrossRef]
- Langston, T. An analytical model for the ballistic performance of ultra-high molecular weight polyethylene composites. Compos. Struct. 2017, 179, 245–257. [Google Scholar] [CrossRef]
- Hazzard, M.K.; Trask, R.S.; Heisserer, U.; Van Der Kamp, M.; Hallett, S.R. Finite element modelling of Dyneema® composites: From quasi-static rates to ballistic impact. Compos. Part A Appl. Sci. Manuf. 2018, 115, 31–45. [Google Scholar] [CrossRef] [Green Version]
- Harel, H.; Marom, G.; Kenig, S. Delamination controlled ballistic resistance of polyethylene/polyethylene composite materials. Appl. Compos. Mater. 2002, 9, 33–42. [Google Scholar] [CrossRef]
- Yuan, Z.; Chen, X.; Zeng, H.; Wang, K.; Qiu, J. Identification of the elastic constant values for numerical simulation of high velocity impact on dyneema® woven fabrics using orthogonal experiments. Compos. Struct. 2018, 204, 178–191. [Google Scholar] [CrossRef] [Green Version]
- Cunniff, P.M. An Analysis of the System Effects in Woven Fabrics under Ballistic Impact. Text. Res. J. 1992, 62, 495–509. [Google Scholar] [CrossRef]
- Naik, N.K.; Shrirao, P.; Reddy, B.C.K. Ballistic impact behaviour of woven fabric composites: Parametric studies. Int. J. Impact Eng. 2006, 32, 1521–1552. [Google Scholar] [CrossRef]
- O’Masta, M.R.; Crayton, D.H.; Deshpande, V.S.; Wadley, H.N.G. Mechanisms of penetration in polyethylene reinforced cross-ply laminates. Int. J. Impact Eng. 2015, 86, 249–264. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.G.; Satapathy, S.S.; Vargas-Gonzalez, L.R.; Walsh, S.M. Ballistic impact response of Ultra-High-Molecular-Weight Polyethylene (UHMWPE). Compos. Struct. 2015, 133, 191–201. [Google Scholar] [CrossRef]
- Nguyen, L.H.; Lässig, T.R.; Ryan, S.; Riedel, W.; Mouritz, A.P.; Orifici, A.C. Numerical modelling of ultra-high molecular weight polyethylene composite under impact loading. Procedia Eng. 2015, 103, 436–443. [Google Scholar] [CrossRef]
- Lim, C.T.; Shim, V.P.W.; Ng, Y.H. Finite-element modeling of the ballistic impact of fabric armor. Int. J. Impact Eng. 2003, 28, 13–31. [Google Scholar] [CrossRef]
- Ramadhan, A.A.; Abu Talib, A.R.; Mohd Rafie, A.S.; Zahari, R. High velocity impact response of Kevlar-29/epoxy and 6061-T6 aluminum laminated panels. Mater. Des. 2013, 43, 307–321. [Google Scholar] [CrossRef]
- Haj-Ali, R. The Sublaminate Model. In Multiscale Modeling and Simulation of Composite Materials and Structures; Young, W., Kwon, D.H., Allen, R.T., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 334–341. ISBN 9780387363189. [Google Scholar]
- Russell, B.P.; Kandan, K.; Deshpande, V.S.; Fleck, N.A. The high strain rate response of UHMWPE: From fibre to laminate. Int. J. Impact Eng. 2013, 60, 1–9. [Google Scholar] [CrossRef]
- Royal DSM N.V, DSM—Product Specification Sheet HB26; Royal DSM: Heerlen, The Netherlands, 2011.
- Afshari, M.; Sikkema, D.J.; Lee, K.; Bogle, M. High performance fibers based on rigid and flexible polymers. Polym. Rev. 2008, 48, 230–274. [Google Scholar] [CrossRef]
- Mustacchi, S. Multi-Scale Dynamic Modeling of Projectile Penetration in Soft Polymeric-Fiber Laminated Composite; Tel Aviv University: Tel Aviv, Israel, 2013. [Google Scholar]
- Levi-Sasson, A.; Meshi, I.; Mustacchi, S.; Amarilio, I.; Benes, D.; Favorsky, V.; Eliasy, R.; Aboudi, J.; Haj-Ali, R. Experimental determination of linear and nonlinear mechanical properties of laminated soft composite material system. Compos. Part B Eng. 2014, 57, 96–104. [Google Scholar] [CrossRef]
- Ramberg, W.; Osgood, W.R. Description of Stress-Strain Curves by Three Parameters; Technical Note No. 902; National Advisory Committee for Aeronautics: Washington, DC, USA, 1943. [Google Scholar]
- Tsai, S.W.; Wu, E.M. A General Theory of Strength for Anisotropic Materials. J. Compos. Mater. 1971, 5, 58–80. [Google Scholar] [CrossRef]
- Utomo, D.H. High-speed Impact Modelling and Testing of Dyneema Composite; TUDelft: Delft, The Netherland, 2011; ISBN 9789461910233. [Google Scholar]
- Yong, M.; Iannucci, L.; Falzon, B.G. Efficient modelling and optimisation of hybrid multilayered plates subject to ballistic impact. Int. J. Impact Eng. 2010, 37, 605–624. [Google Scholar] [CrossRef]
- Flanagan, M.P.; Zikry, M.A.; Wall, J.W.; El-Shiekh, A. An Experimental Investigation of High Velocity Impact and Penetration Failure Modes in Textile Composites. J. Compos. Mater. 1999, 33, 1080–1103. [Google Scholar] [CrossRef]
- Abu Al-Rub, R.K.; Kim, S.M. Predicting mesh-independent ballistic limits for heterogeneous targets by a nonlocal damage computational framework. Compos. Part B Eng. 2009, 40, 495–510. [Google Scholar] [CrossRef]
- Park, M.; Yoo, J.; Chung, D.T. An optimization of a multi-layered plate under ballistic impact. Int. J. Solids Struct. 2005, 42, 123–137. [Google Scholar] [CrossRef]
- Krishnan, K.; Sockalingam, S.; Bansal, S.; Rajan, S.D. Composites: Part B Numerical simulation of ceramic composite armor subjected to ballistic impact. Compos. Part B 2010, 41, 583–593. [Google Scholar] [CrossRef]
- Naik, N.K.; Shrirao, P. Composite structures under ballistic impact. Compos. Struct. 2004, 66, 579–590. [Google Scholar] [CrossRef]
- Zhang, Z.; Shen, S.; Song, H.; Zhang, D. Ballistic penetration of Dyneema fiber laminate. Mater. Sci. Technol. 1997, 14, 265. [Google Scholar]
- Hayhurst, C.J.; Leahy, J.; van der Jagt-Deutekom, M.; Jacobs, M.; Kelly, P. Development of Material Models for Numerical Simulation of Ballistic Impact onto Polyethylene Fibrous Armour. In Proceedings of the Personal Armour Systems Symposium 2000 (PASS2000), Colchester, UK, 5–8 September 2000; pp. 169–178. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Dyneema HB26 |
|---|---|
| E11 (GPa) | 81.39 |
| E22 (GPa) | 1.84 |
| E33 (GPa) | 1.85 |
| G12 (MPa) | 723.5 |
| G13 (MPa) | 720 |
| G23 (MPa) | 680.9 |
| ν12 | 0.28 |
| ν13 | 0.28 |
| ν23 | 0.36 |
| Test no. | Thickness (mm) | Impact Velocity (m/s) | Time (µs) | Ballistic Performance (Threat: 44 Grain Projectile) | |||
|---|---|---|---|---|---|---|---|
| BH (mm) | BW (mm) | Perforation of Target | Vr (m/s) | ||||
| 1 | 8.8 | 413 | 60 | 7.2 | 26.4 | No | ----- |
| 2 | 8.6 | 436 | 60 | 7.2 | 27.9 | No | ----- |
| 3 | 8.8 | 530 | 60 | 9.4 | 32.7 | No | ----- |
| 4 | 8.7 | 606 | 60 | 11.5 | 34.1 | No | ----- |
| 5 | 8.7 | 698 | 25 | 9.8 | 23.5 | Yes | 271.3 |
| 6 | 8.6 | 708 | 25 | 8.3 | 23.1 | Yes | 307.2 |
| 7 | 8.6 | 814 | 25 | 9.9 | 20.9 | Yes | 521 |
| 8 | 8.7 | 893 | 25 | 9.8 | 22.8 | Yes | 624.7 |
| Xt (GPa) | Xc (GPa) | Yt (GPa) | Yc (GPa) | Si (GPa) | So (GPa) | Δ (GPa) | β | G12 (GPa) | τ0 (GPa) | n | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Dyneema HB26 | 1 | 0.1 | 0.05 | 2 | 0.03 | 0.38 | 1 | 1 | 0.73 | 0.03 | 3 |
| TW[#] | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| component | ||||||
| TW[#] | 7 | 8 | 9 | 10 | 11 | 12 |
| component |
| Plate | Projectile | |
|---|---|---|
| Material | Dyneema HB26 | Steel, FSP 2.85 gr (44 grain) |
| Dimensions (mm) | 400 × 400 × 8.7 | Ø7.62 × 8.84 (d × h) |
| Element’s type | C3D8R, Linear hexahedral | C3D4, Linear tetrahedral |
| Number of elements | 432,000 | 10,923 |
| DOF | 1,368,351 | |
| Boundary condition | The plate is clamped at its side edges and the projectile is given an initial velocity in the OP direction. A general contact interaction is defined and all element surfaces are allowed to come into contact with each other. | |
| Impact Velocity (m/s) | Perforated | Time (µs) | Residual Velocity (Vr) (m/s) | ||
|---|---|---|---|---|---|
| Model | Experimental | Error (%) | |||
| 413 | No | ----- | 0 | 0 | 0.0 |
| 436 | No | ----- | 0 | 0 | 0.0 |
| 530 | No | ----- | 0 | 0 | 0.0 |
| 606 | No | ----- | 0 | 0 | 0.0 |
| 698 | Yes | 50 | 217.6 | 271.3 | 19.8 |
| 708 | Yes | 65 | 229.9 | 307.2 | 25.2 |
| 814 | Yes | 30 | 359.8 | 521 | 30.9 |
| 893 | Yes | 25 | 535.7 | 624.7 | 14.3 |
| Impact Velocity (m/s) | Time (µs) | Bulge Height (BH) (mm) | Bulge Width (BW) (mm) | SP | ||||
|---|---|---|---|---|---|---|---|---|
| Model | Experimental | Error (%) | Model | Experimental | Error (%) | (%) | ||
| 413 | 60 | 6.1 | 7.2 | 15.3 | 26.6 | 26.4 | 0.9 | 95.2 |
| 436 | 60 | 6.5 | 7.2 | 10.1 | 26.4 | 27.9 | 5.4 | 95.9 |
| 530 | 60 | 7.4 | 9.4 | 21.2 | 32.9 | 32.7 | 0.6 | 93.4 |
| 606 | 60 | 8.2 | 11.5 | 28.9 | 34.4 | 34.1 | 1.0 | 91.1 |
| 698 | 25 | 8.4 | 9.8 | 14.9 | 24.0 | 23.5 | 2.0 | 85.2 |
| 708 | 25 | 8.1 | 8.3 | 2.0 | 19.8 | 23.1 | 14.0 | 84.0 |
| 814 | 25 | 9.8 | 9.9 | 0.8 | 18.4 | 20.9 | 12.2 | 83.0 |
| 893 | 25 | 12.4 | 9.8 | 26.0 | 18.2 | 22.8 | 20.2 | 81.0 |
| Avg. SP | 89.5 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chricker, R.; Mustacchi, S.; Massarwa, E.; Eliasi, R.; Aboudi, J.; Haj-Ali, R. Ballistic Penetration Analysis of Soft Laminated Composites Using Sublaminate Mesoscale Modeling. J. Compos. Sci. 2021, 5, 21. https://doi.org/10.3390/jcs5010021
Chricker R, Mustacchi S, Massarwa E, Eliasi R, Aboudi J, Haj-Ali R. Ballistic Penetration Analysis of Soft Laminated Composites Using Sublaminate Mesoscale Modeling. Journal of Composites Science. 2021; 5(1):21. https://doi.org/10.3390/jcs5010021
Chicago/Turabian StyleChricker, Raz, Shaul Mustacchi, Eyass Massarwa, Rami Eliasi, Jacob Aboudi, and Rami Haj-Ali. 2021. "Ballistic Penetration Analysis of Soft Laminated Composites Using Sublaminate Mesoscale Modeling" Journal of Composites Science 5, no. 1: 21. https://doi.org/10.3390/jcs5010021
APA StyleChricker, R., Mustacchi, S., Massarwa, E., Eliasi, R., Aboudi, J., & Haj-Ali, R. (2021). Ballistic Penetration Analysis of Soft Laminated Composites Using Sublaminate Mesoscale Modeling. Journal of Composites Science, 5(1), 21. https://doi.org/10.3390/jcs5010021