Development of Lift Control System Algorithm and P-M-E Analysis in the Workplace

Abstract
:1. Introduction
2. Control Network Development
2.1. Development of Lift Control Algorithm
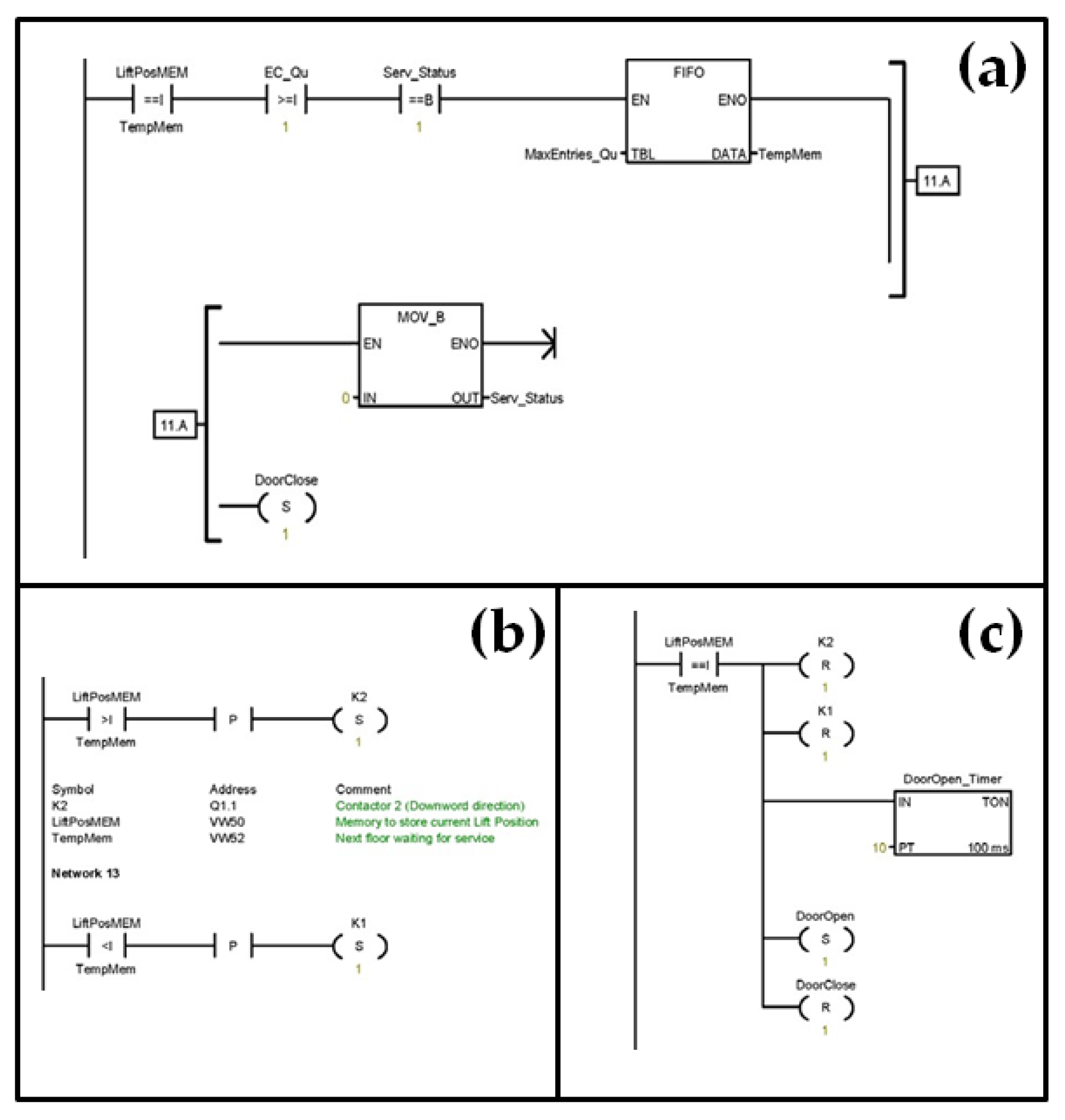
2.2. Ladder Logic
3. P-M-E System Analysis in the Workplace
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Cooper, D.A.; Inglis, J.; Barney, G. Elevator and Escalator Micropedia, 6th ed.; GBA Publications: Sedbergh, UK, 2009; ISBN 978-0952569688. [Google Scholar]
- Allen-Bradley. Converting Relays to Programmable Controllers; Rockwell Automation Publication: Wilwaukee, WI, USA, 2001; ISBN 1761-WP001A-EN-P. [Google Scholar]
- Erickson, K.T. Programmable Logic Controllers: An Emphasis on Design and Application, 2nd ed.; Dogwood Valley Press LLC: Rolla, MO, USA, 2011; ISBN 978-0-9766259-2-6. [Google Scholar]
- All about Circuits—Programmable Logic Controller (PLC). Available online: https://www.allaboutcircuits.com/textbook/digital/chpt-6/programmable-logic-controllers-plc/ (accessed on 3 September 2018).
- Blikoontech—S7 200 PLC Based Elevator Control System. Available online: https://www.blikoontech.com/s7-200-plc-based-elevator-control-system/ (accessed on 3 September 2018).
- Zhang, J.; He, J.; Hu, F. Design of elevator group control simulation test bed based on PC-PLC. J. Changchun Univ. Sci. Technol. 2009, 32, 105–108. [Google Scholar]
- Liu, X. Development of elevator monitor system based on the Fieldbus. J. Electr. Electron. Educ. 2008, 30. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-DQDZ200801022.htm (accessed on 3 October 2018).
- Koshti, K.M.; Joshi, S.M. Design of Human machine interface for PLC based automation system. IFAC Proc. Vol. 2007, 40, 343–346. [Google Scholar] [CrossRef]
- Sharma, S.; Ladakhi, T.Y.; Tiwary, A.P.; Pradhan, B.B.; Phipon, R. Application of PLC for elevator control system. In Proceedings of the International Symposium on Devices MEMS, Intelligent Systems & Communication, Gangtok, India, 12–14 April 2011; pp. 4–7. [Google Scholar]
- Zheng, S.; Liu, F. The design of elevator control system based on PLC and configuration. In Advances in Computer Science, Intelligent System and Environment; Jin, D., Lin, S., Eds.; Springer: Berlin/Heidelberg, Germnay, 2011. [Google Scholar]
- Singh, G.; Agarwal, A.; Jarial, R.K.; Agarwal, V.; Mondal, M. PLC controlled elevator system. In Proceedings of the 2013 Students Conference on Engineering and Systems (SCES), Allahabad, India, 12–14 April 2013; pp. 1–5. [Google Scholar]
- Yang, X.; Yang, X.; Zhu, Q.; Xu, H. Design and practice of an Elevator control system based on PLC. In Proceedings of the IEEE Workshop on Power Electronics and Intelligent Transportation System, Guangzhou, China, 2–3 August 2008. [Google Scholar]
- Ron Carter, S.B.; Selvaraj, A. Design and implementation of PLC based elevator. Int. J. Comp. Appl. 2013, 63, 4–10. [Google Scholar]
- Tharani, K.; Gupta, S.; Puri, A.; Khera, R.; Kumar, A. PLC based multi-floor elevator control system. Int. J. Robot. Autom. 2015, 4, 202–208. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Outline of a new approach to the analysis of complex systems and decision processes. IEEE Trans. Syst. Man Cybern. 1973, 1, 28–44. [Google Scholar] [CrossRef]
- Sharma, D. Designing and Modeling Fuzzy control systems. Int. J. Comp. Appl. 2011, 16, 46–53. [Google Scholar] [CrossRef]
- Aoki, H.; Sasaki, K. Group supervisory control system assisted by artificial intelligence. Elev. World 1990, 2, 70–80. [Google Scholar]
- Tobita, T.; Fujino, A.; Inaba, H.; Yoneda, K.; Ueshima, T. An elevator characterized group supervisor control system. In Proceedings of the International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, 28 October–1 November 1991; pp. 1972–1976. [Google Scholar]
- Umeda, Y.; Uetani, K.; Ujihara, H.; Tsuji, S. Fuzzy theory and intelligent options. Elev. World 1989, 7, 86–91. [Google Scholar]
- Nakai, S.; Kubo, S.; Imasaki, N.; Yoshitsuku, T.; Kiji, J.; Endo, T. Elevator group control system with fuzzy neural network model. In Proceedings of the 4th IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 20–24 March 1995; pp. 37–38. [Google Scholar]
- Powell, B.A.; Sirag, D.J. Fuzzy logic—A new way of thinking about complexities of dispatching elevators. Elev. World 1993, 9, 78–84. [Google Scholar]
- Kim, C.; Seong, K.A.; Lee-Kwang, H.; Kim, J.O.; Lim, Y.B. A fuzzy approach to elevator group control system. IEEE Trans. Syst. Man Cybern. 1995, 25, 985–990. [Google Scholar]
- Kim, C.; Seong, K.A.; Lee-Kwang, H.; Kim, J.O. Design and implementation of a fuzzy elevator group control system. IEEE Trans. Syst. Man, Cybern. Part A Syst. Hum. 1998, 28, 277–287. [Google Scholar]
- Dewen, Z.; Hui, Q.; Tao, Z.; Guanghui, S.; Lili, W. The fuzzy logic inference decision system of elevator group supervisory control. IFAC Proc. 1998, 31, 117–120. [Google Scholar] [CrossRef]
- Kim, H.M. A design for elevator group controller of building using adaptive dual fuzzy algorithm. KSME Int. J. 2001, 15, 1664–1675. [Google Scholar] [CrossRef]
- Onuoha, J.C.; Odii, J.N. Improving the efficiencies of elevator systems using fuzzy logic. Comput. Inf. Syst. Dev. Inform. 2012, 3, 29–34. [Google Scholar]
- Fernández, J.; Cortés, P.; Gaudix, J.; Muñuzuri, J. Logic Elevator Group Control System for energy optimization. Int. J. Inf. Technol. Decis. Mak. 2013, 12, 591–617. [Google Scholar] [CrossRef]
- Rahim, N.A.; Ping, H.W.; Jamaludin, J. A novel self-tuning scheme for fuzzy logic elevator group controller. IEICE Electron. Express 2010, 7, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Jamaludin, J.; Rahim, N.A.; Ping, H.W. An elevator group control system with a self-tuning fuzzy logic group controller. IEEE Trans. Ind. Electron. 2010, 57, 4188–4198. [Google Scholar] [CrossRef]
- Patiño-Forero, A.A.; Muñoz, D.M.; Caribé de Carvalho, G.; Llanos, C.H. Modeling of an elevator group control system using programmable logic control and destination control system. ABCM Symp. Ser. Mechatron. 2010, 4, 433–441. [Google Scholar]
- Coşkum, Y.M.; Karali, M. The realization of a control algorithm and its PLC based program able to authorize four different ranks of priority to elevator uses. Int. J. Appl. Math. Electron. Comp. 2013, 4, 416–420. [Google Scholar]
- Tafreshi, S.A.; Klamroth-Marganska, V.; Nussbaumer, S.; Riener, R. Real-time closed-loop control of human heart rate and blood pressure. IEEE Trans. Biomed. Eng. 2015, 62, 1434–1442. [Google Scholar] [CrossRef] [PubMed]
- Škulavík, T. PLC-Based Fuzzy Control System for a Robotic Manipulator. Ph.D. Thesis, Slovak University of Technology, Bratislava, Slovak, 2013. [Google Scholar]
- Song, X.; Xie, Z. Application of man-machine-environment system engineering in coal mines safety management. Proc. Eng. 2014, 84, 87–92. [Google Scholar]
- Kosuge, K.; Fujisawa, Y.; Fukuda, T. Control of mechanical system with man-machine interaction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Raleigh, NC, USA, 7–10 July 1992; pp. 87–92. [Google Scholar]
- Lee, C.C. Fuzzy logic in control systems: Fuzzy logic controller—Part I. IEEE Trans. Syst. Man Cybern. 1990, 20, 404–418. [Google Scholar] [CrossRef]
- Liu, L.; Sun, X.; Song, K. Analysis on the man-machine-environment collaborative teaching method for mining engineering major. Int. J. Emerg. Technol. Learn. 2016, 11, 42–46. [Google Scholar] [CrossRef]
- Tyosuojelu.fi—Machinery and Tools. Available online: http://www.tyosuojelu.fi/web/en/working-conditions/machinery-and-tools (accessed on 3 October 2018).
- Real Commercial—How Much Office Space Business Needs. Available online: https://www.realcommercial.com.au/news/much-office-space-business-need (accessed on 3 October 2018).
- Standard NEN 1824:2010—Ergonomics—Ergonomic Requirements for the Surface of (Workplaces in) Administration and Office Spaces; ICS-CODE13.180-91.040.20; Nederlands Normalisatie-Instituut: Delft, Netherlands, 2010.
- UTEM-Group. Accreditation of Training Center at UTEM for Training on Labor Protection. Available online: www.utem-group.com/en/news/accreditation-of-training-center-at-utem-for-training-on-labor-protection (accessed on 3 October 2018).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IF | THEN (Fp) |
|---|---|
| WT = Short | High |
| WT = Medium | Medium |
| WT = Long | Low |
| SA = Large | High |
| SA = Medium | Medium |
| SA = Small | Low |
| Dist = Less | High |
| Dist = Medium | Medium |
| Dist = High | Low |
| Symbol | Address | Comment |
|---|---|---|
| indcatr_Gnd | Q0.0 | indicator of ground floor request |
| Max Entries_Qu | VWO | maximum no. of entries in the queue/starting address of table |
| Req_Gnd_Floor | 10.0 | request coming from ground floor |
| Number of Connection | Directions | Comment |
|---|---|---|
| 1 | P1-M1 | Influence of personnel on management |
| 2 | M1-P1 | State information machine processed by personnel |
| 3 | M1-TW | Influence of machine on the goal of work |
| 4 | TW-P3 | Influence of the goal of work on the psycho-physiological state of personnel |
| 5 | P3-P1 | Influence of the state of organism of personnel on quality of his work |
| 6 | M2-P3 | Personnel under the influence of dangerous production factors |
| 7 | M3…M7-E | Influence of machine on an environment |
| 8 | E-P3…P7 | Influence of environment on the state of organism of personnel |
| 9 | E-M1 | Influence of environment on the machine |
| 10 | P1-M2 | Influence of personnel on the emergency state of machine |
| 11 | P2-E | Influence of personnel as a biological object on an environment |
| 12 | P3-P2 | Influence of the psycho-physiological state on the intensity of exchange of matters between an organism, environment and physiology of personnel |
| 13 | M1-M2 | Necessary information for making emergency influence |
| M2-M1 | Managing emergency influences | |
| A | The system of external control A- P1 | Managing information about technological process from the external control of the system |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afa Michael, I. Development of Lift Control System Algorithm and P-M-E Analysis in the Workplace. Appl. Syst. Innov. 2018, 1, 38. https://doi.org/10.3390/asi1040038
Afa Michael I. Development of Lift Control System Algorithm and P-M-E Analysis in the Workplace. Applied System Innovation. 2018; 1(4):38. https://doi.org/10.3390/asi1040038
Chicago/Turabian StyleAfa Michael, Inikuro. 2018. "Development of Lift Control System Algorithm and P-M-E Analysis in the Workplace" Applied System Innovation 1, no. 4: 38. https://doi.org/10.3390/asi1040038
APA StyleAfa Michael, I. (2018). Development of Lift Control System Algorithm and P-M-E Analysis in the Workplace. Applied System Innovation, 1(4), 38. https://doi.org/10.3390/asi1040038