Motion Control System of Unmanned Railcars Based on Image Recognition



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Detecting Predefined Signs with Image Recognition
2.1. Image Pre-Processing Using OpenCV
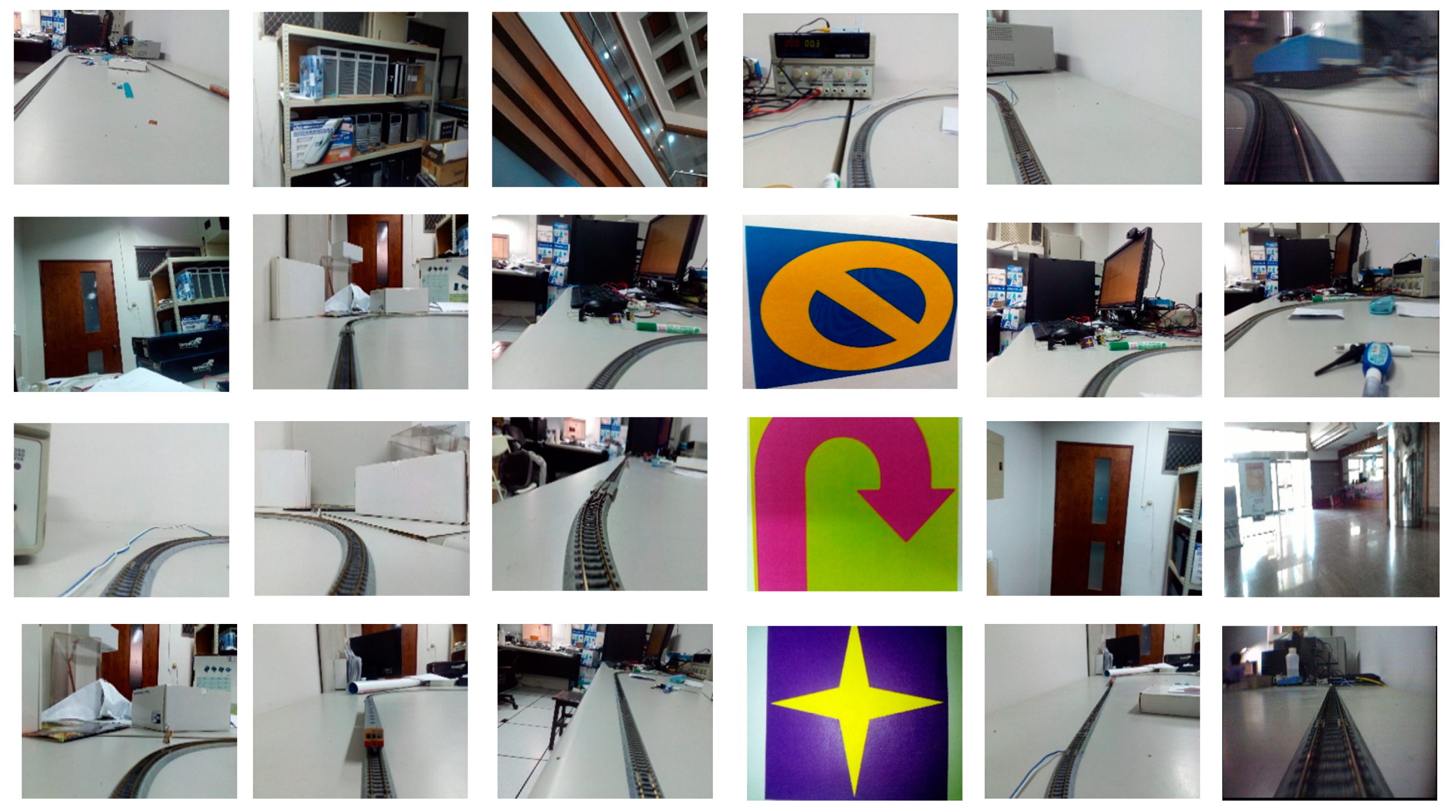
2.2. Image Recognition of Predefined Signs
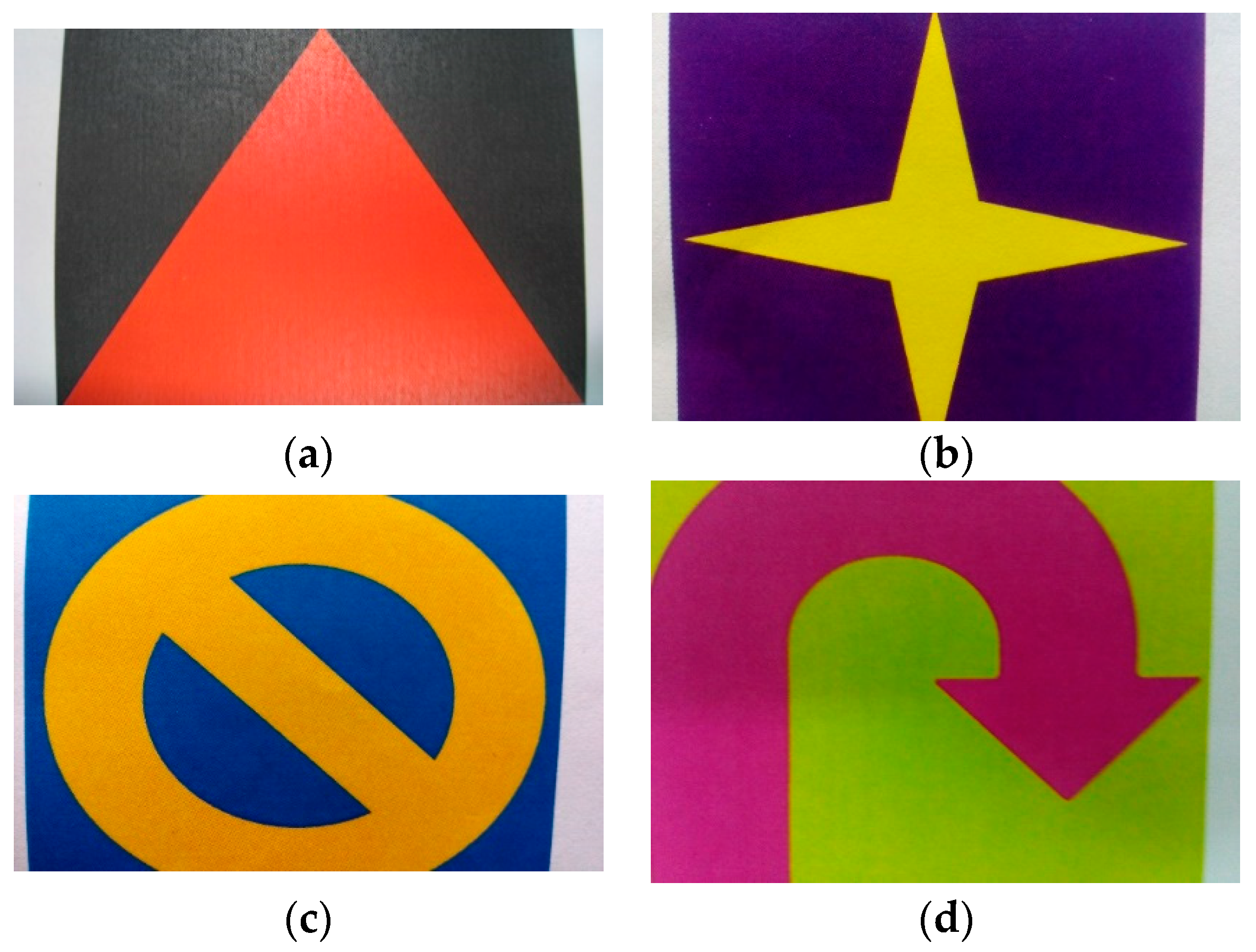
2.3. Designs of Predefined Signs Serving as Motion Commands
2.4. Training Strong Classifiers of Motion Comands
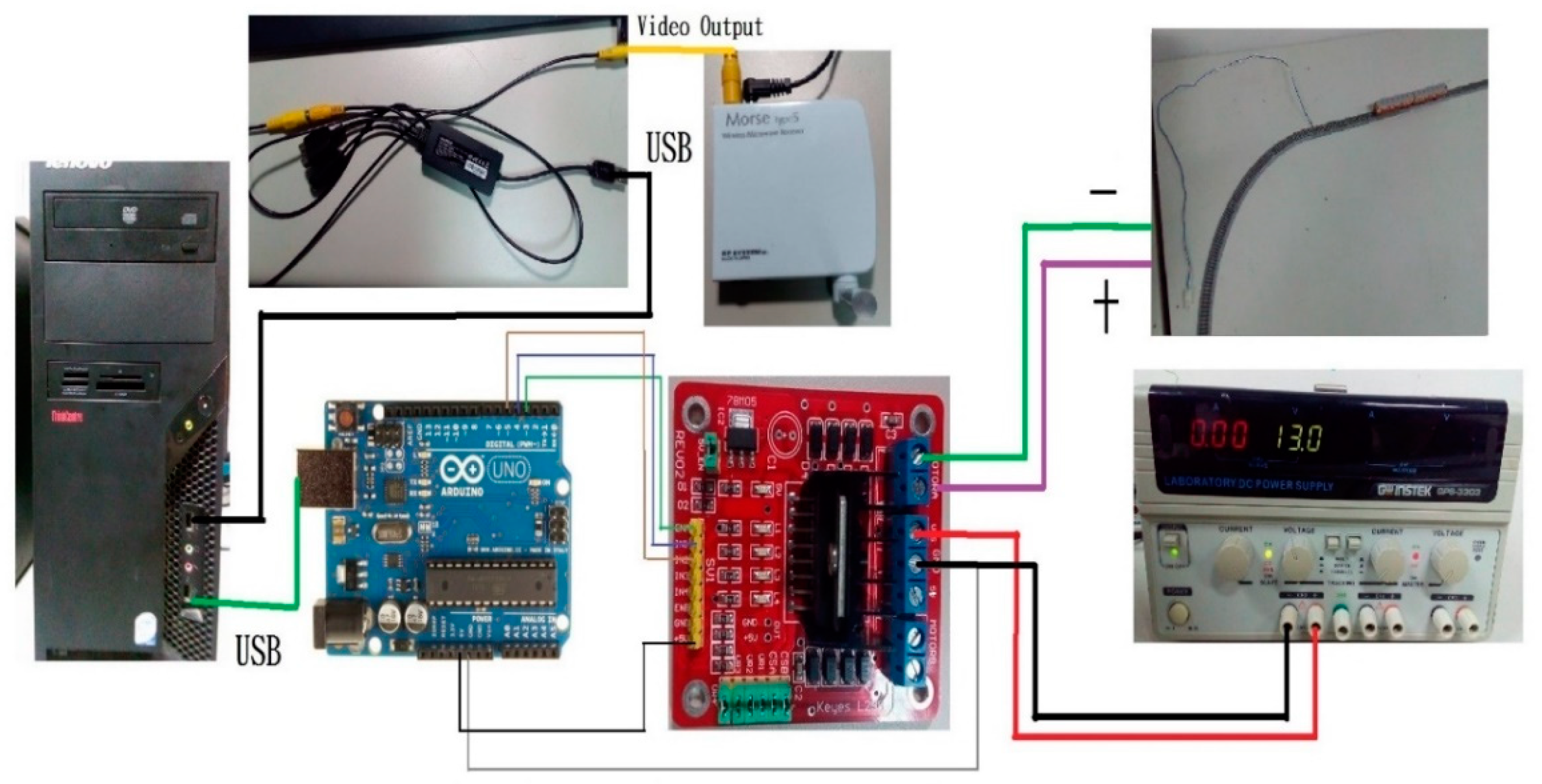
3. Experiment System Architecture and Setting
4. Experiment Results
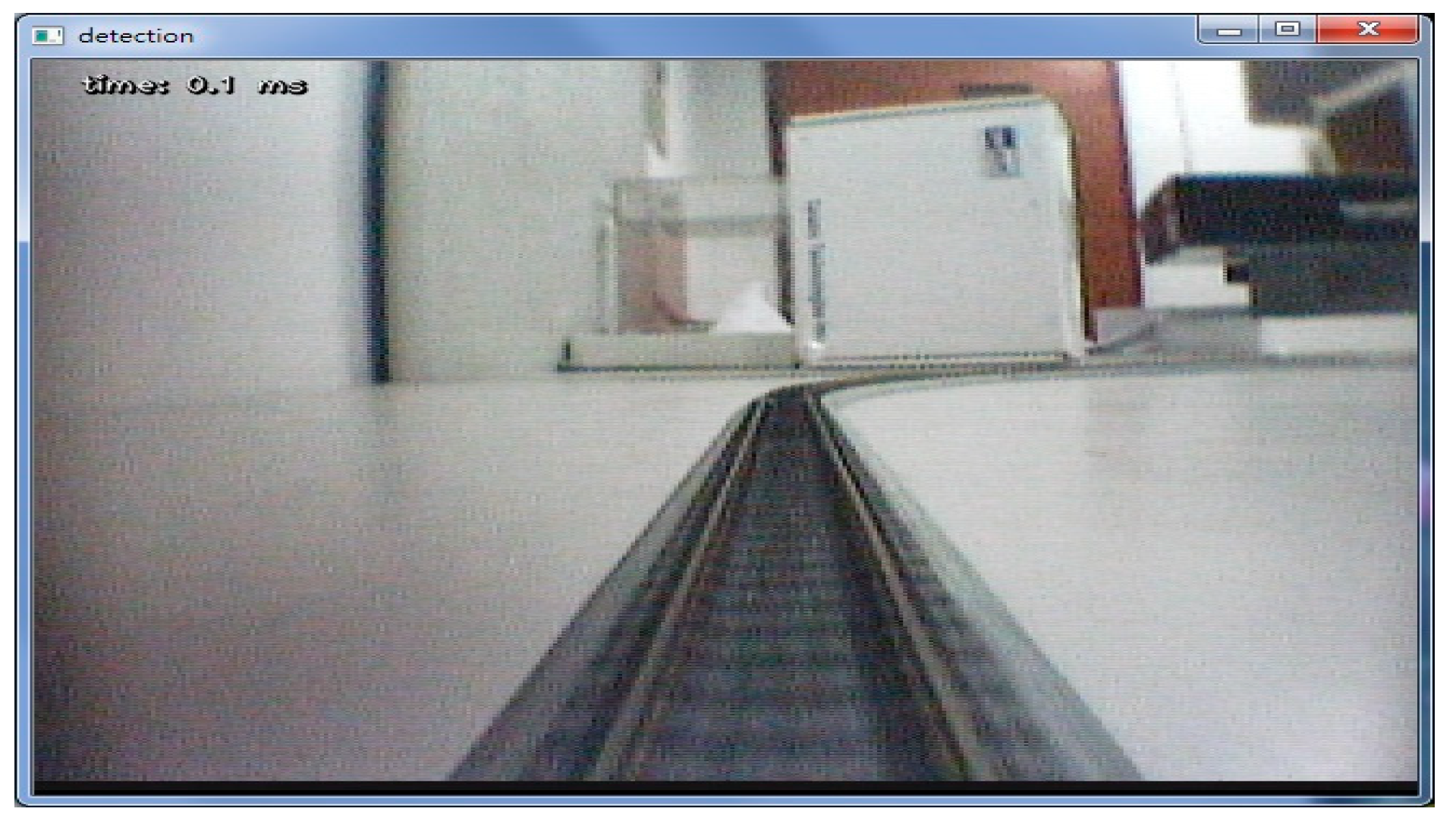
4.1. Introduction to Testing Program
4.2. Manual Command Input Interface
4.3. Railcar Speed Estimation Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, Y.H. Function Model of Train Control System for Unmanned Operation of Urban Transit System. In Proceedings of the International Conference on Control, Automation and Systems 2010, Gyeonggi-do, Korea, 27–30 October 2010; pp. 1129–1133. [Google Scholar]
- Track Circuit Based Train Control Systems (TBTC). Available online: https://en.wikipedia.org/wiki/Track_circuit (accessed on 19 February 2019).
- Kim, J.; Choi, S.W.; Song, Y.-S.; Yoon, Y.-K.; Kim, Y.-K. Automatic Train Control over LTE: Design and Performance Evaluation. Future Railw. Commun. IEEE Commun. Mag. 2015, 53, 102–109. [Google Scholar] [CrossRef]
- Oh, S.; Yoon, Y.; Kim, K.; Kim, Y. Design of Train Integrity Monitoring System for Radio based Train Control System. In Proceedings of the 2012 12th International Conference on Control, Automation and Systems in ICC, Jeju Island, Korea, 17–21 October 2012; pp. 1237–1240. [Google Scholar]
- Carreño, W.C. Efficient Driving of CBTC ATO Operated Trains. Ph.D. Thesis, Universidad Pontificia Comillas, Madrid, Spain, 2017. Available online: https://repositorio.comillas.edu/rest/bitstreams/72943/retrieve (accessed on 19 February 2019).
- Communication Based Train Control (CBTC) System. Available online: http://www.mitsubishielectric.com/news/2016/0114.html (accessed on 19 February 2019).
- IEEE Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society. IEEE Standard for CBTC Performance and Functional Requirements (1474.1–1999); IEEE: Piscataway Township, NJ, USA, 1999. [Google Scholar] [CrossRef]
- Fernández-Rodríguez, A.; Fernández-Cardador, A.; Cucala, A.P.; Domínguez, M.; Gonsalves, T. Design of Robust and Energy-Efficient ATO Speed Profiles of Metropolitan Lines Considering Train Load Variations and Delays. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2061–2071. [Google Scholar] [CrossRef]
- Mlinarić, T.J.; Ponikvar, K. Energy Efficiency of Railway Lines. Promet-Traffic Transp. 2011, 23, 187–193. [Google Scholar]
- Viola, P.; Jones, M. Rapid Object Detection using a Boosted Cascade of Simple Features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; Available online: https://www.cs.cmu.edu/~efros/courses/LBMV07/Papers/viola-cvpr-01.pdf (accessed on 19 February 2019).
- Lienhart, R.; Maydt, J. An Extended Set of Haar-like Features for Rapid Object Detection. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; pp. 22–25. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.214.9150&rep=rep1&type=pdf (accessed on 31 January 2019).
- Lienhart, R.; Kuranov, A.; Pisarevsky, V. Empirical Analysis of Detection Cascades of Boosted Classifiers for Rapid Object Detection. In Proceedings of the Joint Pattern Recognition Symposium, Magdeburg, Germany, 10–12 September 2003; pp. 297–304. [Google Scholar]
- Yoshioka, M.; Suganuma, N.; Yoneda, K.; Aldibaja, M. Real-Time Object Classification for Autonomous Vehicle using LIDAR. In Proceedings of the Artificial Intelligence, Robotics and Human-Computer Interaction (ICIIBMS 2017), Okinawa, Japan, 24–26 November 2017; pp. 210–211. [Google Scholar]
- Broggi, A.; Cardarelli, E.; Cattani, S.; Medici, P.; Sabbatelli, M. Vehicle Detection for Autonomous Parking using a Soft-Cascade AdaBoost Classifier. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 8–11 June 2014; pp. 912–917. [Google Scholar]
- Khan, B.S.; Hanafi, M.; Mashohor, S. Automated Road Marking Detection System for Autonomous Car. In Proceedings of the 2015 IEEE Student Conference on Research and Development, Lumpur, Malaysia, 13–14 December 2015; pp. 398–401. [Google Scholar]
- Jo, K.; Jo, Y.; Suhr, J.K.; Jung, H.G.; Sunwoo, M. Precise Localization of an Autonomous Car Based on Probabilistic Noise Models of Road Surface Marker Features Using Multiple Cameras. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3377–3392. [Google Scholar] [CrossRef]
- OpenCV. Available online: http://OpenCV.org/ (accessed on 31 January 2019).
- PWM. Available online: https://www.arduino.cc/en/tutorial/PWM (accessed on 31 January 2019).
- Kato Camera Railcar Set. Available online: http://www.katomodels.com/hobbycenter/product/roundhouse/000314.php (accessed on 31 January 2019).
- Chung, K.L. Image Processing and Computer Vision, 6th ed.; Dong-Hua Pub.: Taipei, Taiwan, 2018. (In Chinese) [Google Scholar]
- Python. Available online: https://www.python.org/ (accessed on 31 January 2019).
- cv2.cvtColor. Available online: https://docs.opencv.org/2.4/modules/imgproc/doc/miscellaneous_transformations.html?highlight=cv2.cvtcolor#cv2.cvtColor (accessed on 31 January 2019).
- cv2.GaussianBlur. Available online: https://docs.opencv.org/2.4/modules/imgproc/doc/filtering.html?highlight=cv2.gaussianblur#cv2.GaussianBlur (accessed on 31 January 2019).
- cv2.equalizeHist. Available online: https://docs.opencv.org/2.4/modules/imgproc/doc/histograms.html?highlight=cv2.equalizehist#cv2.equalizeHist (accessed on 31 January 2019).
- Freund, Y.; Schapire, R.E. A Short Introduction to Boosting. J. Jpn. Soc. Artif. Intell. 1999, 14, 771–780. [Google Scholar]
- opencv_createsamples and opencv_traincascade. Available online: https://docs.opencv.org/2.4.13/doc/user_guide/ug_traincascade.html (accessed on 31 January 2019).
- CascadeClassifier::detectMultiScale. Available online: http://docs.opencv.org/2.4.13.2/modules/objdetect/doc/cascade_classification.html (accessed on 31 January 2019).
- Arduino UNO R3 Microcontroller. Available online: https://store.arduino.cc/usa/arduino-uno-rev3 (accessed on 31 January 2019).
- NumPy. Available online: http://www.numpy.org/ (accessed on 31 January 2019).
- Firmata. Available online: http://firmata.org/wiki/Main_Page (accessed on 31 January 2019).
- The Camera Perspective Film of Full Functional Experiment. Available online: https://www.youtube.com/watch?v=6QnGb2CMvwc (accessed on 31 January 2019).
- The Bystander Perspective Film of Full Functional experiment. Available online: https://www.youtube.com/watch?v=TZ-kg4dFVjM (accessed on 31 January 2019).
- The Film of Speed Estimation Experiment. Available online: https://www.youtube.com/watch?v=oLZXzY03Afc (accessed on 31 January 2019).
- The Camera Perspective Film of This Preliminary Experiment. Available online: https://www.youtube.com/watch?v=I4OEYRAn0Ak (accessed on 31 January 2019).










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tseng, Y.-W.; Hung, T.-W.; Pan, C.-L.; Wu, R.-C. Motion Control System of Unmanned Railcars Based on Image Recognition. Appl. Syst. Innov. 2019, 2, 9. https://doi.org/10.3390/asi2010009
Tseng Y-W, Hung T-W, Pan C-L, Wu R-C. Motion Control System of Unmanned Railcars Based on Image Recognition. Applied System Innovation. 2019; 2(1):9. https://doi.org/10.3390/asi2010009
Chicago/Turabian StyleTseng, Yuan-Wei, Tsung-Wui Hung, Chung-Long Pan, and Rong-Ching Wu. 2019. "Motion Control System of Unmanned Railcars Based on Image Recognition" Applied System Innovation 2, no. 1: 9. https://doi.org/10.3390/asi2010009
APA StyleTseng, Y. -W., Hung, T. -W., Pan, C. -L., & Wu, R. -C. (2019). Motion Control System of Unmanned Railcars Based on Image Recognition. Applied System Innovation, 2(1), 9. https://doi.org/10.3390/asi2010009