
Development and Experimental Study of Mobile Fire Smoke Decontamination System

Abstract
:1. Introduction
2. Fire Smoke Decontamination Process and System
2.1. Fire Smoke Decontamination Process
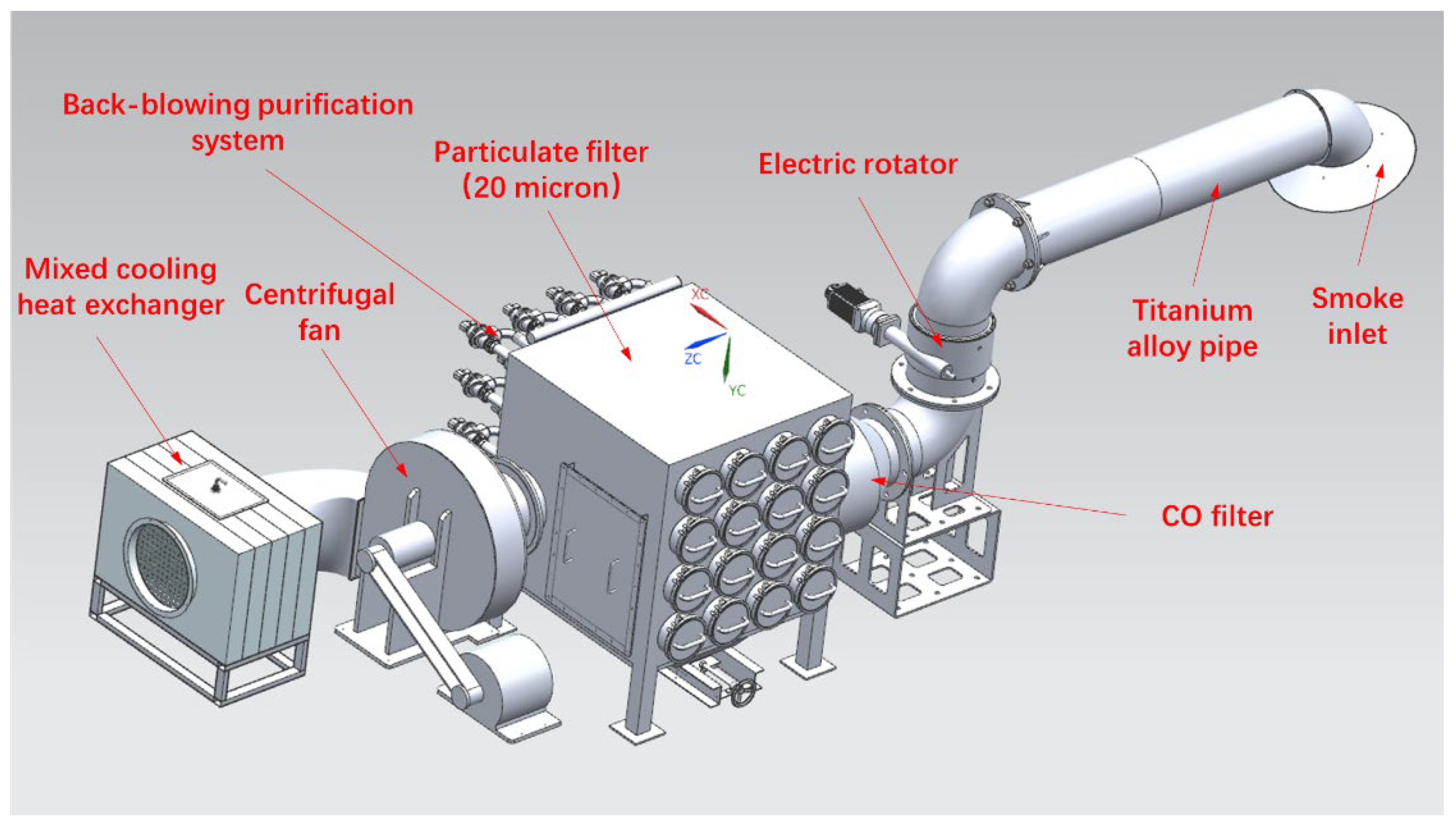
2.2. Fire Smoke Decontamination System
3. Description of the Experiment
3.1. Experimental Set Up
3.2. Sensors Arrangement and Data Collection
3.3. Evaluation of the Operating Performance of the FSDS
4. Tunnel Fire Simulation
4.1. Simulation for the FSDS Operation Process
4.2. Simulation for the Semitransverse Ventilation Operation Process
5. Results and Discussions
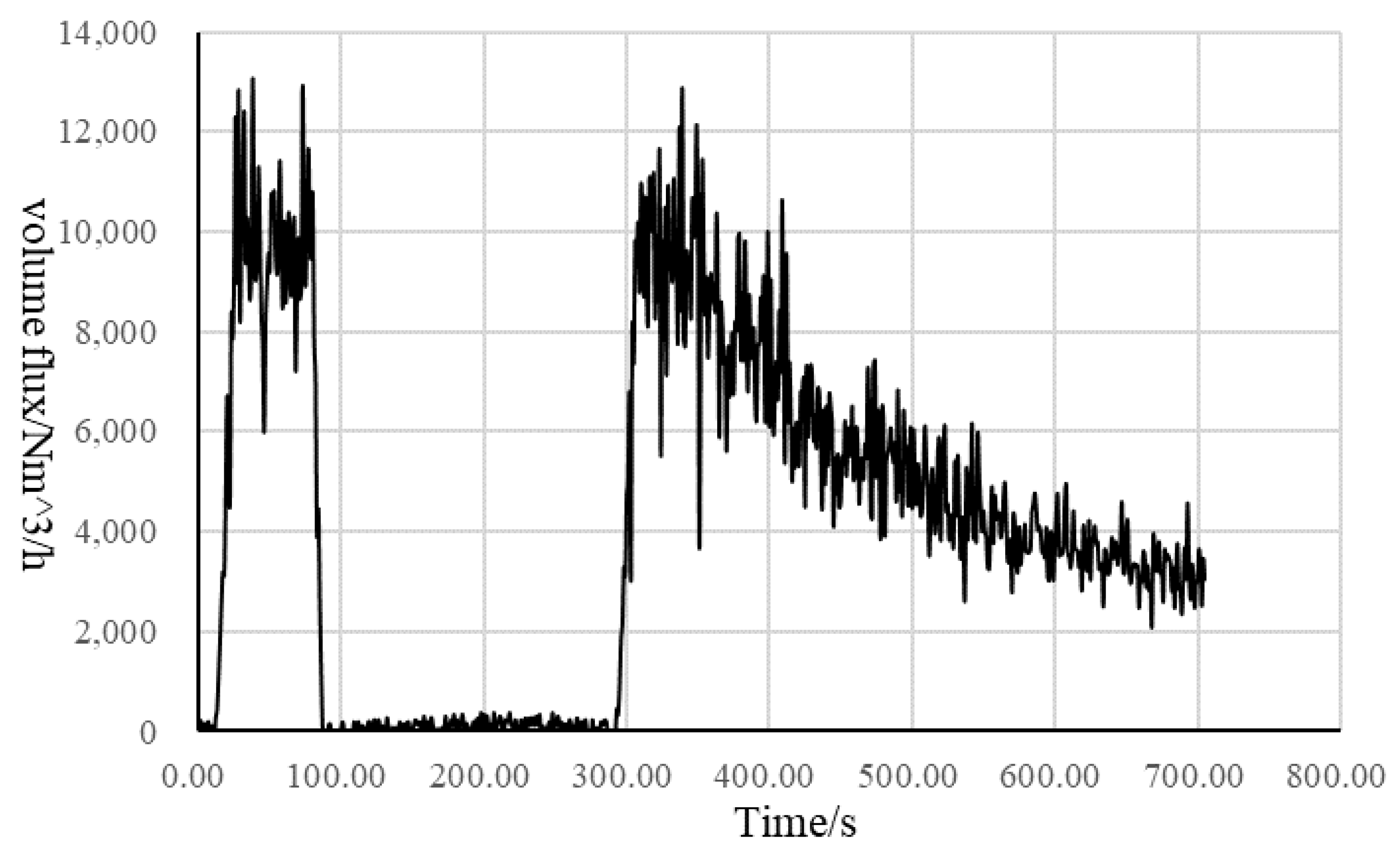
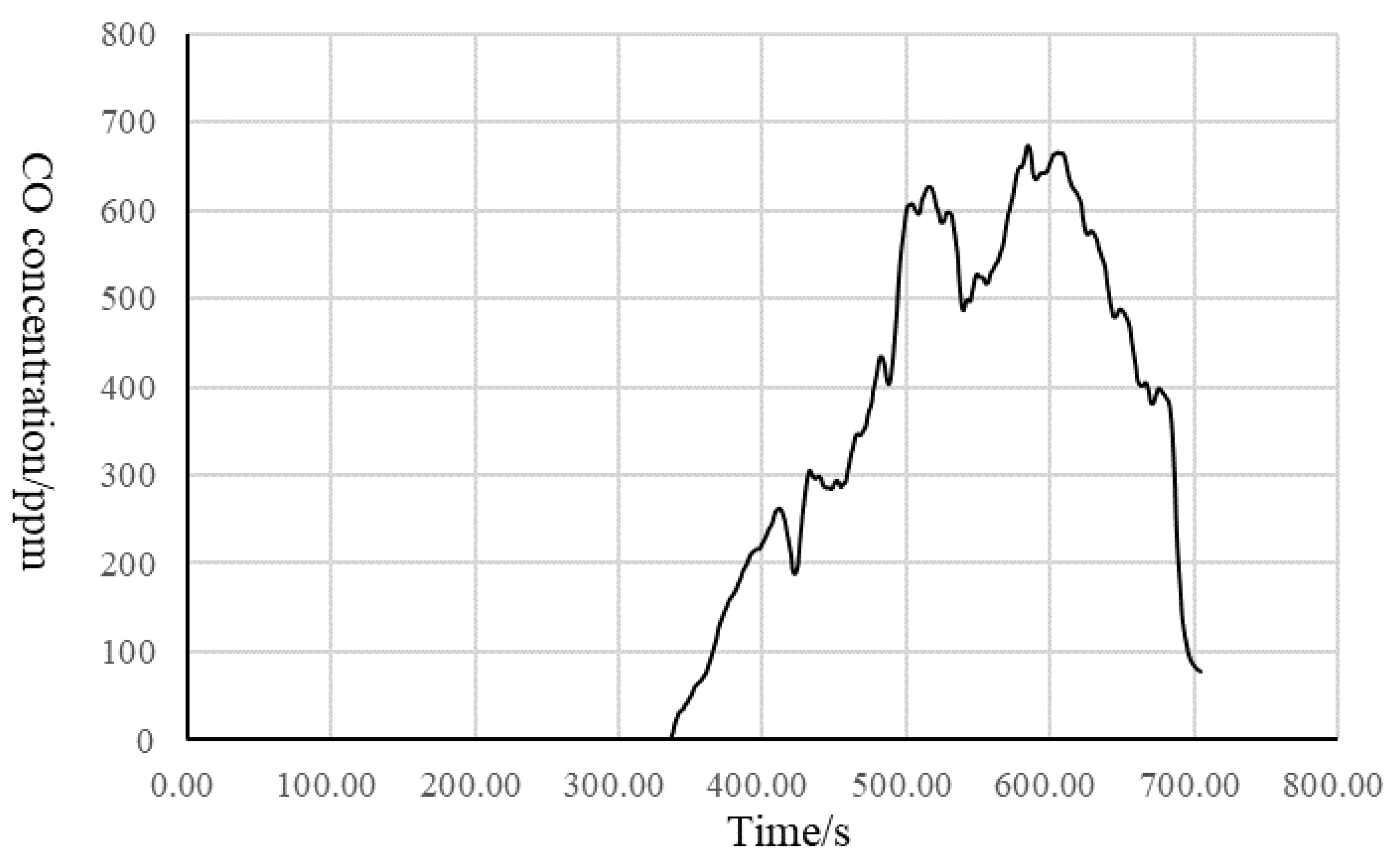
5.1. Experimental Results
5.2. Performance Prediction of the FSDS in Rectangular Tunnel
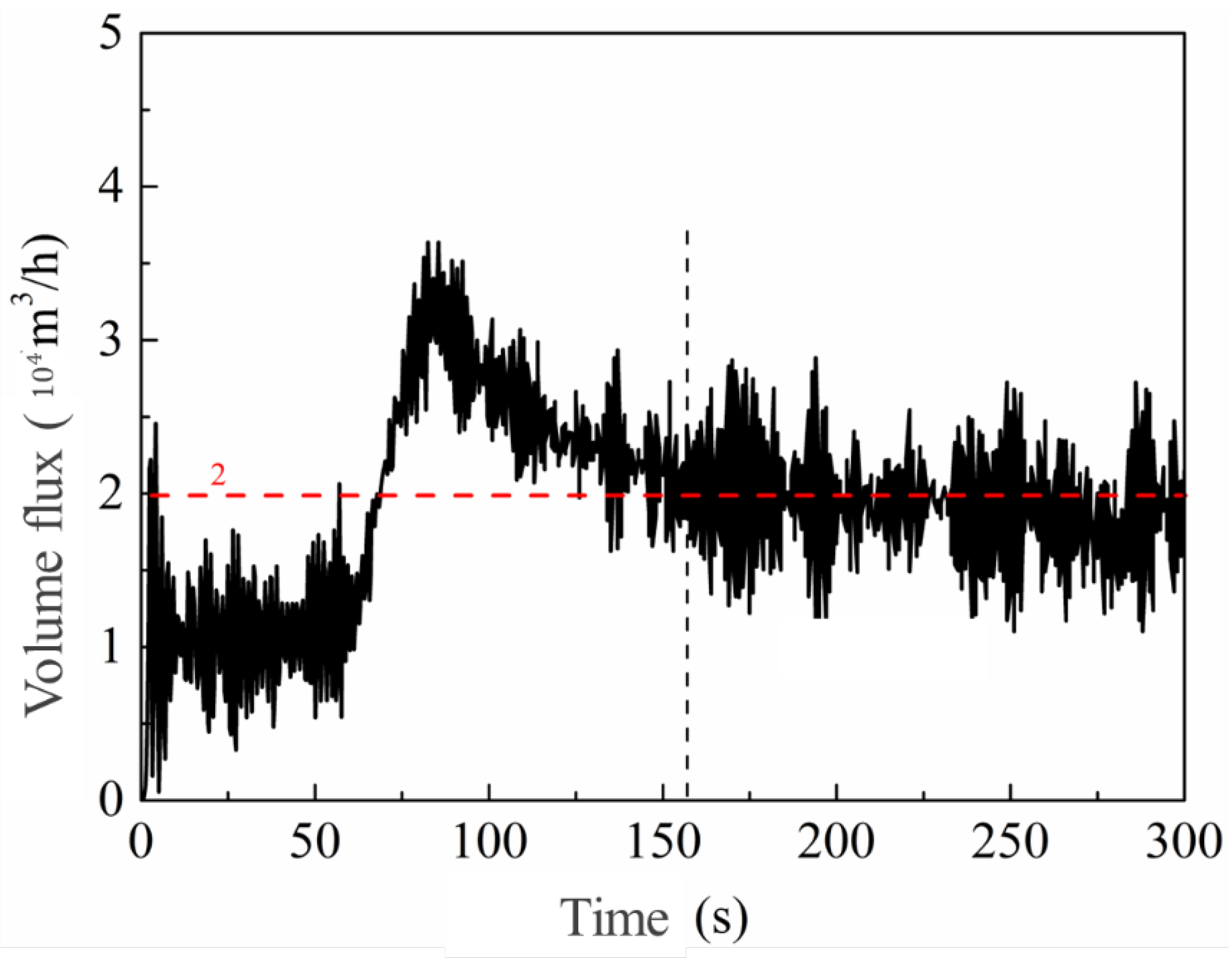
5.2.1. Longitudinal Airflow in Tunnel
5.2.2. Height of Smoke Layer
5.2.3. Temperature/CO/Visibility Distribution at 1.8 m Height
5.2.4. Inlet/Exhaust Temperature of the FSDS
5.3. Semitransverse Ventilation Operation Performance
5.3.1. Temperature Distribution at 1.8 m Height
5.3.2. Height of Smoke Layer
6. Conclusions
- (1)
- The developed FSDS is able to eliminate fire smoke particles and CO, cool the space, and improve the visibility of the fire site.
- (2)
- The real fire experiment demonstrates that the FSDS operating performance parameters are as follows: , , , and .
- (3)
- The fire simulation in the rectangular tunnel shows that:
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, Y.Z.; Ingason, H. The maximum ceiling gas temperature in a large tunnel fire. Fire Saf. J. 2012, 48, 38–48. [Google Scholar] [CrossRef]
- Oka, Y.; Oka, H. Velocity and temperature attenuation of a ceiling-jet along a horizontal tunnel with a flat ceiling and natural ventilation. Tunn. Undergr. Space Technol. 2016, 56, 79–89. [Google Scholar] [CrossRef]
- Ji, J.; Gao, Z.H.; Fan, C.G.; Zhong, W.; Sun, J.H. A study of the effect of plug-holing and boundary layer separation on natural ventilation with vertical shaft in urban road tunnel fires. Int. J. Heat Mass Transf. 2012, 55, 6032–6041. [Google Scholar] [CrossRef]
- Fridolf, K.; Ronchi, E.; Nilsson, D.; Frantzich, H. Movement speed and exit choice in smoke-filled rail tunnels. Fire Saf. J. 2013, 59, 8–21. [Google Scholar] [CrossRef]
- Roh, J.S.; Ryou, H.S.; Park, W.H.; Jang, Y.J. CFD simulation and assessment of life safety in a subway train fire. Tunn. Undergr. Space Technol. 2009, 24, 447–453. [Google Scholar] [CrossRef]
- Maele, K.V.; Merci, B. Application of RANS and LES field simulations to predict the critical ventilation velocity in longitudinally ventilated horizontal tunnels. Fire Saf. J. 2008, 43, 598–609. [Google Scholar] [CrossRef]
- Kang, K. Characteristic length scale of critical ventilation velocity in tunnel smoke control. Tunn. Undergr. Space Technol. 2010, 25, 205–211. [Google Scholar] [CrossRef]
- Meng, N.; Yang, W.Y.; Xin, L.; Li, X.; Liu, B.; Jin, X. Experimental study on backlayering length of thermal smoke flow in a longitudinally ventilated tunnel with blockage at upstream of fire source. Tunn. Undergr. Space Technol. 2018, 82, 315–324. [Google Scholar] [CrossRef]
- Fan, C.G.; Jin, Z.F.; Zhang, J.Q.; Zhu, H.Y. Effects of ambient wind on thermal smoke exhaust from a shaft in tunnels with natural ventilation. Appl. Therm. Eng. 2017, 117, 254–262. [Google Scholar] [CrossRef]
- Zhu, Y.T.; Tang, F.; Chen, L.; Wang, Q.; Xu, X. Effect of lateral concentrated smoke extraction on the smoke back-layering length and critical velocity in a longitudinal ventilation tunnel. J. Wind. Eng. Ind. Aerodyn. 2020, 207, 104403. [Google Scholar] [CrossRef]
- Tao, L.L.; Zeng, Y.H.; Li, J.; Yang, G.; Fang, Y.; Li, B. Study on the maximum temperature and temperature decay in single-side centralized smoke exhaust tunnel fires. Int. J. Therm. Sci. 2022, 172, 107277. [Google Scholar] [CrossRef]
- Wang, J.H.; Yuan, J.P.; Fang, Z.; Tang, Z.; Qian, P.; Ye, J. A model for predicting smoke back-layering length in tunnel fires with the combination of longitudinal ventilation and point extraction ventilation in the roof. Tunn. Undergr. Space Technol. 2018, 80, 16–25. [Google Scholar] [CrossRef]
- Xu, Z.S.; You, W.; Kong, J.; Cao, H.H.; Zhou, C. A study of fire smoke spreading and control in emergency rescue stations of extra-long railway tunnels. J. Loss Prev. Process Ind. 2017, 49, 155–161. [Google Scholar] [CrossRef]
- Zhou, Y.L.; Bi, H.Q.; Wang, H.L.; Lei, B. Fire characteristics of rescue station inside railway tunnel with semi-transverse ventilation. Tunn. Undergr. Space Technol. 2020, 98, 103303. [Google Scholar] [CrossRef]
- Dinh, C.T.; Huynh, T.; Kim, Y.B. LQI Control System Design with GA Approach for Flying-Type Firefighting Robot Using Waterpower and Weight-Shifting Mechanism. Appl. Sci. 2022, 12, 9334. [Google Scholar] [CrossRef]
- Yu, J. Control System of Fire Rescue Robot for High-Rise Building Design. Adv. Civ. Eng. 2022, 2022, 7867533. [Google Scholar] [CrossRef]
- Alsaif, K.A.; Kim, B.S. King Abdulaziz City for Science and Technology. Smart Compact Indoor Firefighting Robot for Extinguishing a Fire at an Early Stage. U.S. Patent 8,973,671, 10 March 2015. [Google Scholar]
- Siregar, L. Design and Implementation of Hardware’s Firefighting Legged Robot. IOP Conf. Ser. Mater. Sci. Eng. 2018, 417, 012014. [Google Scholar] [CrossRef]
- Wang, Y.; Xing, J.P.; Guo, H.; Wang, L.J. Key Technologies of Tunnel Firefighting Robots. IETE Tech. Rev. 2017, 34, 3–10. [Google Scholar] [CrossRef]
- Anthony, M. Heat and Mass Transfer; Taylor and Francis: Oxfordshire, UK, 2018. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameters | Value |
|---|---|
| Fire location | Highway tunnels/underground garages |
| Fire type | Automobile fire |
| Fire power | 0~6 MW |
| Smoke production | 0~4000 m3/h |
| Space temperature | 60~400 °C |
| CO concentration | 500~2000 ppm |
| Design Parameters | Value |
|---|---|
| Fire smoke decontamination capacity | 9000 m3/h (Cold operation)/5000 m3/h (normal operation) |
| CO filtration efficiency | 90% |
| Particulate filtration size/efficiency | 20 um/95% |
| Smoke cooling power | 500 KW |
| Water spray flux/pressure | 300 Lh−1/0.5 Mpa |
| Overall power | 13 KW |
| Mobile speed | >5.4 km/h |
| Climbing angle | <15° |
| Turning radius | <3 m |
| Surmountable obstacle height | 120 mm |
| Apparatus | Measuring Parameter | Accuracy |
|---|---|---|
| Thermocouple (K type) | Temperature (FSDS exhaust) | ±0.5 °C |
| Duct type CO sensor | CO concentration (FSDS exhaust) | FS ± 1% |
| Pitot tube (AFP-8A) | Smoke flow velocity (FSDS titanium alloy pipe) | FS 0.02% |
| Infrared temperature measuring device (FLUKE-MT4) | Temperature (FSDS inlet) | FS ± 2% |
| Handheld CO detector (FZ-BX) | CO concentration (FSDS inlet) | FS ± 3% |
| Data logger (LR8431-30) | / | / |
| Size of the Grid | Simulation Result of the Average Smoke Layer Height |
|---|---|
| 20 mm (cross-section); 100 mm (longitudinal) | 4.51 m |
| 10 mm (cross-section); 500 mm (longitudinal) | 4.35 m |
| 15 mm (cross-section); 150 mm (longitudinal) | 4.54 m |
| Parameters | Value |
|---|---|
| Average environment temperature | 11.3 °C |
| Average FSDS inlet temperature | 230.0 °C |
| Average FSDS inlet CO | 1610 ppm |
| Parameters | Value |
|---|---|
| 8629.01 Nm3/h | |
| 5472.37 Nm3/h | |
| 417.7 KW | |
| 78% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, H.; Zhou, Y.; Zhou, F.; Huang, L.; Chen, T. Development and Experimental Study of Mobile Fire Smoke Decontamination System. Fire 2023, 6, 55. https://doi.org/10.3390/fire6020055
Yuan H, Zhou Y, Zhou F, Huang L, Chen T. Development and Experimental Study of Mobile Fire Smoke Decontamination System. Fire. 2023; 6(2):55. https://doi.org/10.3390/fire6020055
Chicago/Turabian StyleYuan, Hongyong, Yang Zhou, Fan Zhou, Lida Huang, and Tao Chen. 2023. "Development and Experimental Study of Mobile Fire Smoke Decontamination System" Fire 6, no. 2: 55. https://doi.org/10.3390/fire6020055
APA StyleYuan, H., Zhou, Y., Zhou, F., Huang, L., & Chen, T. (2023). Development and Experimental Study of Mobile Fire Smoke Decontamination System. Fire, 6(2), 55. https://doi.org/10.3390/fire6020055