

Comprehensive Review of Power Electronic Converters in Electric Vehicle Applications


Abstract
:1. Introduction
2. Charging Section
2.1. Conductive Charging for Electric Vehicles
2.1.1. Onboard Charging
Phase Shift Modulation Topology
Isolated Full-Bridge LLC Resonant Converters
2.1.2. Offboard Charging
Three-Phase Bridgeless Boost Rectifier
Vienna Rectifier
2.2. Wireless Charging
2.2.1. Classification of Wireless Power Transfer (WPT)
Microwave Radiation WPT System
Capacitive WPT System
Inductive WPT System
Static Wireless Charging
Quasi-Dynamic Wireless Charging
Dynamic Wireless Charging
2.2.2. Compensation Networks
Capacitive Power Transfer Compensations
Inductive Power Transfer Compensations
2.2.3. Wireless Charging Challenges
3. DC–DC Converter
3.1. Conventional Boost DC–DC Converter (BC)
3.2. Interleaved Four-Phase Boost DC–DC Converter (IBC)
3.3. Boost DC–DC Converter with Resonant Circuit (BCRC)
3.4. Full Bridge Boost DC–DC Converter (FBC)
3.5. Isolated ZVS DC–DC Converter (ZVSC)
3.6. Isolated Multiport DC–DC Converter (MPC)
3.7. Multidevice Interleaved DC–DC Bidirectional Converter (MDIBC)
4. Energy Storage
5. Inverter
5.1. Two-Level Inverter (TLI)
5.2. Multi-Level Inverter (MLI)
6. Motor and Drive
6.1. Traction Motor
6.2. Integrated Motor Drive
7. Simulation Result and Analysis
7.1. Charging Section
7.2. DC–DC Converter
7.3. Inverter
8. Comparative Analysis and Summary
9. Future Trends
9.1. WBG Devices
9.1.1. Chargers
9.1.2. Electrified Powertrain
9.1.3. Motor Drives
9.2. System Integration
10. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Poorfakhraei, A.; Narimani, M.; Emadi, A. A Review of Multilevel Inverter Topologies in Electric Vehicles: Current Status and Future Trends. IEEE Open J. Power Electron. 2021, 2, 155–170. [Google Scholar] [CrossRef]
- Sources of Greenhouse Gas Emissions. 2020. Available online: https://www.epa.gov/ghgemissions/sources-greenhouse-gas-emissions (accessed on 18 December 2022).
- Xu, S.; Guo, Y.; Su, W. A proof-of-concept demonstration for the transportation electrification education. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Meintz, A.; Zhang, J.; Vijayagopal, R.; Kreutzer, C.; Ahmed, S.; Bloom, I.; Burnham, A.; Carlson, R.B.; Dias, F.; Tanim, T.; et al. Enabling fast charging-vehicle considerations. J. Power Sour. 2017, 367, 216–227. [Google Scholar] [CrossRef]
- Ronanki, D.; Kelkar, A.; Williamson, S.S. Extreme Fast Charging Technology—Prospects to Enhance Sustainable Electric Transportation. Energies 2019, 12, 3721. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, S.; Vu, H.-N.; Hasan, M.M.; Tran, D.-D.; El Baghdadi, M.; Hegazy, O. DC-DC Converter Topologies for Electric Vehicles, Plug-in Hybrid Electric Vehicles and Fast Charging Stations: State of the Art and Future Trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Bradley, T.H.; Frank, A.A. Design, demonstrations and sustainability impact assessments for plug-in hybrid electric vehicles. Renew. Sustain. Energy Rev. 2009, 13, 115–128.3. [Google Scholar] [CrossRef]
- Emadi, A.; Lee, Y.J.; Rajashekara, K. Power Electronics and Motor Drives in Electric, Hybrid Electric, and Plug-In Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2237–2245. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid Electric Vehicles: Architecture and Motor Drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Quinn, C.; Zimmerle, D.; Bradley, T.H. The effect of communication architecture on the availability, reliability, and eco-nomics of plug-in hybrid electric vehicle-to-grid ancillary services. J. Power Sources 2010, 195, 1500–1509. [Google Scholar] [CrossRef]
- Reimers, J.; Dorn-Gomba, L.; Mak, C.; Emadi, A. Automotive Traction Inverters: Current Status and Future Trends. IEEE Trans. Veh. Technol. 2019, 68, 3337–3350. [Google Scholar] [CrossRef]
- Chakraborty, S.; Hasan, M.M.; Abdur Razzak, M. Transformer-less single-phase grid-tie photovoltaic inverter topologies for residential application with various filter circuits. Renew. Sustain. Energy Rev. 2017, 72, 1152–1166. [Google Scholar] [CrossRef]
- Lin, J.; Schofield, N.; Emadi, A. External-Rotor Switched Reluctance Motor for an Electric Bicycle. IEEE Trans. Transp. Electrif. 2015, 1, 348–356. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.; Li, S.; Han, D.; Sarlioglu, B.; Minav, T.A.; Pietola, M. A Review of Integrated Motor Drive and Wide-Bandgap Power Electronics for High-Performance Electro-Hydrostatic Actuators. IEEE Trans. Transp. Electrif. 2018, 4, 684–693. [Google Scholar] [CrossRef]
- Feng, H.; Tavakoli, R.; Onar, O.C.; Pantic, Z. Advances in High-Power Wireless Charging Systems: Overview and Design Considerations. IEEE Trans. Transp. Electrif. 2020, 6, 886–919. [Google Scholar] [CrossRef]
- Tomaszewska, A.; Chu, Z.; Feng, X.; O’kane, S.; Liu, X.; Chen, J.; Ji, C.; Endler, E.; Li, R.; Liu, L.; et al. Lithium-ion battery fast charging: A review. eTransportation 2019, 1, 100011. [Google Scholar] [CrossRef]
- Ahmad, F.; Alam, M.S.; Asaad, M. Developments in xEVs charging infrastructure and energy management system for smart microgrids including xEVs. Sustain. Cities Soc. 2017, 35, 552–564. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 18–36. [Google Scholar] [CrossRef]
- Kia Soul EV Specifications. 2017. Available online: http://www.kiamedia.com/us/en/models/soulev/2017/specifications (accessed on 26 September 2017).
- J1772: SAE Electric Vehicle and Plug in Hybrid Electric Vehicle Conductive Charge Coupler–SAE International. Available online: http://standards.sae.org/j1772_201602/ (accessed on 15 August 2017).
- Budhia, M.; Covic, G.; Boys, J. A new IPT magnetic coupler for electric vehicle charging systems. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 2487–2492. [Google Scholar]
- Wang, H.; Hasanzadeh, A.; Khaligh, A. Transportation Electrification: Conductive charging of electrified vehicles. IEEE Electrif. Mag. 2013, 1, 46–58. [Google Scholar] [CrossRef]
- Tanimoto, S.; Matsui, K. High junction temperature and low parasitic inductance power module technology for com-pact power conversion systems. IEEE Trans. Electron Devices 2015, 62, 258–269. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W. Multi-Objective Optimization of 50 kW/85 kHz IPT System for Public Transport. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1370–1382. [Google Scholar] [CrossRef]
- Inductive Power Transfer IPT®-Charge. Available online: https://www.conductix.us/en/products/inductive-power-transfer-iptr/inductive-power-transfer-iptr-charge?parent_id=5798 (accessed on 10 August 2020).
- Wave IPT–Wirelessly Charging Electric Vehicles. Available online: www.waveipt.com (accessed on 10 August 2020).
- WiTricity Electric Vehicle Charger. Available online: https://www.st.com/content/ccc/resource/sales_and_marketing/presentation/product_presentation/group0/5a/b1/8e/6c/2b/0d/46/3c/Apec/files/APEC_2016_SiC_%20Wtricity_Wireless_Charging.pdf/_jcr_content/translations/en.APEC_2016_SiC_%20Wtricity_Wireless_Charging.pdf (accessed on 11 August 2020).
- Tritschler, J.; Reichert, S.; Goeldi, B. A practical investigation of a high power, bidirectional charging system for electric vehicles. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–7. [Google Scholar]
- Galigekere, V.P.; Pries, J.; Onar, O.C.; Su, G.; Anwar, S.; Wiles, R.; Seiber, L.; Wilkins, J. Design and Implementation of an Optimized 100 kW Stationary Wireless Charging System for EV Battery Recharging. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3587–3592. [Google Scholar] [CrossRef]
- E-mobility. Available online: http://www.intis.de/intis/mobility.html (accessed on 12 August 2020).
- Czyz, P.; Reinke, A.; Cichowski, A.; Sleszynski, W. Performance comparison of a 650 V GaN SSFET and CoolMOS. In Proceedings of the 2016 10th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Bydgoszcz, Poland, 29 June–1 July 2016; pp. 438–443. [Google Scholar]
- Bertelshofer, T.; Horff, R.; März, A.; Bakran, M.-M. A performance comparison of a 650 V Si IGBT and SiC MOSFET in-verter under automotive conditions. In Proceedings of the PCIM Europe 2016 International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 10–12 May 2016; pp. 1–6. [Google Scholar]
- Millan, J.; Godignon, P.; Perpina, X.; Perez-Tomas, A.; Rebollo, J. A survey of wide bandgap power semiconductor de-vices. IEEE Trans. Power Electron. 2014, 29, 2155–2163. [Google Scholar] [CrossRef]
- Forouzesh, M.; Siwakoti, Y.P.; Gorji, S.A.; Blaabjerg, F.; Lehman, B. Step-Up DC-DC converters: A comprehensive review of voltage-boosting techniques, topologies, and applications. IEEE Trans. Power Electron. 2017, 32, 9143–9178. [Google Scholar] [CrossRef]
- Vijeh, M.; Rezanejad, M.; Samadaei, E.; Bertilsson, K. A general review of multilevel inverters based on main submodules: Structural point of view. IEEE Trans. Power Electron. 2019, 34, 9479–9502. [Google Scholar] [CrossRef]
- Trabelsi, M.; Vahedi, H.; Abu-Rub, H. Review on Single-DC-Source Multilevel Inverters: Topologies, Challenges, Industrial Applications, and Recommendations. IEEE Open J. Ind. Electron. Soc. 2021, 2, 112–127. [Google Scholar] [CrossRef]
- Bilgin, B.; Liang, J.; Terzic, M.V.; Dong, J.; Rodriguez, R.; Trickett, E.; Emadi, A. Modeling and Analysis of Electric Motors: State-of-the-Art Review. IEEE Trans. Transp. Electrif. 2019, 5, 602–617. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.; Li, S.; Han, D.; Sarlioglu, B.; Minav, T.A.; Pietola, M. Achieving high-performance electrified actuation system with integrated motor drive and wide bandgap power electronics. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar] [CrossRef]
- Hannan, A.; Hoque, M.; Hussain, A.; Yusof, Y.; Ker, P.J. State-of-the-art and energy management system of lithium-ion batteries in electric vehicle applications: Issues and recommendations. IEEE Access 2018, 6, 19362–19378. [Google Scholar] [CrossRef]
- Dai, J.; Ludois, D.C. A Survey of Wireless Power Transfer and a Critical Comparison of Inductive and Capacitive Coupling for Small Gap Applications. IEEE Trans. Power Electron. 2015, 30, 6017–6029. [Google Scholar] [CrossRef]
- Subudhi, P.S.; Krithiga, S. Wireless Power Transfer Topologies used for Static and Dynamic Charging of EV Battery: A Review. Int. J. Emerg. Electr. Power Syst. 2020, 21, 20190151. [Google Scholar] [CrossRef] [Green Version]
- Keshmiri, N.; Wang, D.; Agrawal, B.; Hou, R.; Emadi, A. Current Status and Future Trends of GaN HEMTs in Electrified Transportation. IEEE Access 2020, 8, 70553–70571. [Google Scholar] [CrossRef]
- Xydas, S.; Hassan, A.; Marmaras, C.; Jenkins, N.; Cipcigan, L. Electric Vehicle Load Forecasting using Data Mining Methods. In Proceedings of the Hybrid and Electric Vehicles Conference 2013 (HEVC 2013), London, UK, 6–7 November 2013. [Google Scholar]
- Carvalho, A.; Lefévre, S.; Schildbach, G.; Kong, J.; Borrelli, F. Automated driving: The role of forecasts and uncertainty—A control perspective. Eur. J. Control. 2015, 24, 14–32. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.-H.; Kim, M.-S.; Roh, J.-H.; Yang, J.-P.; Park, J.-B. Forecasting of Electric Vehicles Charging Pattern Using Bayesians method with the Convolustion. Ifac-Papersonline 2019, 52, 413–418. [Google Scholar] [CrossRef]
- Carvalho, A.M. Predictive Control under Uncertainty for Safe Autonomous Driving: Integrating Data-Driven Fore-Casts with Control Design; University of California: Berkeley, CA, USA, 2016. [Google Scholar]
- Rodriguez, J.; Dixon, J.; Espinoza, J.; Pontt, J.; Lezana, P. PWM regenerative rectifiers: State of the art. IEEE Trans. Ind. Electron. 2005, 52, 5–22. [Google Scholar] [CrossRef]
- Malinowski, M. Sensorless Control Strategies for Three–Phase PWM Rectifiers. Ph.D. Thesis, Warsaw University of Technology, Warsaw, Poland, 2001. [Google Scholar]
- Fahem, K.; Chariag, D.; Sbita, L. Control of Three-Phase Voltage Source PWM Rectifier. In Proceedings of the 3rd International Conference on Automation, Control, Engineering and Computer Science (ACECS’16), Hammamet, Tunisia, 20–22 March 2016; pp. 649–654. [Google Scholar]
- Premkumar, K.; Kandasamy, P.; Vishnu Priya, T.; Thamizhselvan, T.; Carter, S.B.R. Three-Phase Rectifier Control Techniques: A Comprehensive Literature Survey. Int. J. Sci. Technol. Res. 2020, 9, 3183–3188. [Google Scholar]
- Denis, K.; Olha, K.; Serhii, R. Active rectifier with different control system types. In Proceedings of the 2020 IEEE 4th International Conference on Intelligent Energy and Power Systems (IEPS), Istanbul, Turkey, 7–11 September 2020; pp. 273–278. [Google Scholar]
- Zheng, Y.; Niu, S.; Shang, Y.; Shao, Z.; Jian, L. Integrating plug-in electric vehicles into power grids: A comprehensive review on power interaction mode, scheduling methodology and mathematical foundation. Renew. Sustain. Energy Rev. 2019, 112, 424–439. [Google Scholar] [CrossRef]
- Adib, A.; Afridi, K.K.; Amirabadi, M.; Fateh, F.; Ferdowsi, M.; Lehman, B.; Lewis, L.H.; Mirafzal, B.; Saeedifard, M.; Shadmand, M.B.; et al. E-Mobility—Advancements and Challenges. IEEE Access 2019, 7, 165226–165240. [Google Scholar] [CrossRef]
- Lee, B.-K.; Kim, J.-P.; Kim, S.-G.; Lee, J.-Y. A PWM SRT DC/DC converter for 6.6-kW EV onboard charger. IEEE Trans. Ind. Electron. 2016, 63, 894–902. [Google Scholar] [CrossRef]
- Lee, J.-Y.; Chae, H.-J. 6.6-kW Onboard Charger Design Using DCM PFC Converter with Harmonic Modulation Technique and Two-Stage DC/DC Converter. IEEE Trans. Ind. Electron. 2013, 61, 1243–1252. [Google Scholar] [CrossRef]
- Kim, S.; Kang, F.-S. Multi-functional On-board Battery Charger for Plug-in Electric Vehicles. IEEE Trans. Ind. Electron. 2014, 62, 3460–3472. [Google Scholar] [CrossRef]
- Ibrahim, O.; Yahaya, N.Z.; Saad, N.; Ahmed, K.Y. Design and simulation of phase-shifted full bridge converter for hybrid energy systems. In Proceedings of the 2016 6th International Conference on Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 15–17 August 2016; pp. 1–6. [Google Scholar]
- Wang, H.; Shang, M.; Khaligh, A. A PSFB-Based Integrated PEV Onboard Charger With Extended ZVS Range and Zero Duty Cycle Loss. IEEE Trans. Ind. Appl. 2016, 53, 585–595. [Google Scholar] [CrossRef]
- Li, Z.; Wang, H. Design of a secondary side regulated LLC based integrated PEV onboard charger with full ZVS range. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 1394–1400. [Google Scholar]
- Su, G.-J. Comparison of Si, SiC, and GaN based Isolation Converters for Onboard Charger Applications. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 1233–1239. [Google Scholar]
- Goodwin, G.C.; Graebe, S.F.; Salgado, M.E. Control System Design; Prentice-Hall: Englewood Cliffs, NJ, USA, 2001. [Google Scholar]
- Zhou, K.; Wang, D. Digital repetitive controlled three-phase PWM rectifier. IEEE Trans. Power Electron. 2003, 18, 309–316. [Google Scholar] [CrossRef] [Green Version]
- Tseng, K.; Chen, C. Design and hardware implementation for a full-bridge phase-shift PWM DC/DC converter sys-tem with FPGA-based PI gain-scheduling control. In Proceedings of the 2011 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011; pp. 1578–1582. [Google Scholar]
- Lee, Y.J.; Bak, Y.; Lee, K.-B. Control Method for Phase-Shift Full-Bridge Center-Tapped Converters Using a Hybrid Fuzzy Sliding Mode Controller. Electronics 2019, 8, 705. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.-E. Optimal Dead-Time Control Scheme for Extended ZVS Range and Burst-Mode Operation of Phase-Shift Full-Bridge (PSFB) Converter at Very Light Load. IEEE Trans. Power Electron. 2019, 34, 10823–10832. [Google Scholar] [CrossRef]
- Saeed, J.; Wang, L.; Fernando, N. Model Predictive Control of Phase Shift Full-Bridge DC–DC Converter Using Laguerre Functions. IEEE Trans. Control. Syst. Technol. 2021, 30, 819–826. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons, Ltd.: West Sussex, UK, 2021. [Google Scholar]
- Zhang, J.; Liu, J.; Yang, J.; Zhao, N.; Wang, Y.; Zheng, T.Q. A Modified DC Power Electronic Transformer Based on Series Connection of Full-Bridge Converters. IEEE Trans. Power Electron. 2018, 34, 2119–2133. [Google Scholar] [CrossRef]
- Sun, W.; Xing, Y.; Wu, H.; Ding, J. Modified High-Efficiency LLC Converters with Two Split Resonant Branches for Wide Input-Voltage Range Applications. IEEE Trans. Power Electron. 2017, 33, 7867–7879. [Google Scholar] [CrossRef]
- Vu, H.N.; Choi, W. A Novel Dual Full-Bridge LLC Resonant Converter for CC and CV Charges of Batteries for Electric Ve-hicles. IEEE Trans. Ind. Electron. 2018, 65, 2212–2225. [Google Scholar] [CrossRef]
- Tran, D.D.; Vu, H.N.; Yu, S.; Choi, W. A Novel Soft-switching Full-Bridge Converter with a Combination of a Secondary Switch and a Non dissipative Snubber. IEEE Trans. Power Electron. 2018, 33, 1440–1452. [Google Scholar] [CrossRef]
- Guo, B.; Zhang, Y.; Zhang, J.; Gao, J. Hybrid Control Strategy of Phase-Shifted Full-Bridge LLC Converter Based on Dig-ital Direct Phase-Shift Control. J. Power Electron. 2018, 18, 802–816. [Google Scholar]
- Liu, Z.; Li, B.; Lee, F.C.; Li, Q. High-Efficiency High-Density Critical Mode Rectifier/Inverter for WBG-Device-Based On-Board Charger. IEEE Trans. Ind. Electron. 2017, 64, 9114–9123. [Google Scholar] [CrossRef]
- Lu, X.; Wang, H. A highly efficient multifunctional power electronic interface for PEV hybrid energy management sys-tems. IEEE Access 2019, 7, 8964–8974. [Google Scholar] [CrossRef]
- Shakib, S.M.S.I.; Mekhilef, S. A Frequency Adaptive Phase Shift Modulation Control Based LLC Series Resonant Converter for Wide Input Voltage Applications. IEEE Trans. Power Electron. 2016, 32, 8360–8370. [Google Scholar] [CrossRef]
- Wu, H.; Mu, T.; Gao, X.; Xing, Y. A secondary-side phase-shift-controlled LLC resonant converter with reduced conduc-tion loss at normal operation for Hold-Up time compensation application. IEEE Trans. Power Electron. 2015, 30, 5352–5357. [Google Scholar] [CrossRef]
- Sun, X.; Shen, Y.; Li, W.; Wu, H. A PWM and PFM Hybrid Modulated Three-Port Converter for a Standalone PV/Battery Power System. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 984–1000. [Google Scholar] [CrossRef]
- Sun, X.; Li, X.; Shen, Y.; Wang, B.; Guo, X. Dual-Bridge LLC Resonant Converter with Fixed-Frequency PWM Control for Wide Input Applications. IEEE Trans. Power Electron. 2016, 32, 69–80. [Google Scholar] [CrossRef]
- Lü, Z.; Yan, X.; Sun, L. A L-LLC resonant bidirectional DC-DC converter based on hybrid control of variable frequency and phase shift. Trans. China Electrotech. Soc. 2017, 32, 12–24. [Google Scholar]
- Feng, W.; Lee, F.C.; Mattavelli, P. Simplified Optimal Trajectory Control (SOTC) for LLC Resonant Converters. IEEE Trans. Power Electron. 2012, 28, 2415–2426. [Google Scholar] [CrossRef]
- Fei, C.; Lee, F.C.; Li, Q. Multi-step simplified optimal trajectory control (SOTC) for fast transient response of high fre-quency LLC converters. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2064–2071. [Google Scholar]
- Wei, Y.; Luo, Q.; Wang, Z.; Mantooth, A. Transformer Secondary Voltage Based Resonant Frequency Tracking for LLC Converter. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 1243–1247. [Google Scholar] [CrossRef]
- Bai, S.; Lukic, S.M. Unified Active Filter and Energy Storage System for an MW Electric Vehicle Charging Station. IEEE Trans. Power Electron. 2013, 28, 5793–5803. [Google Scholar] [CrossRef]
- Rivera, S.; Wu, B.; Jiacheng, W.; Athab, H.; Kouro, S. Electric vehicle charging station using a neutral point clamped con-verter with bipolar DC bus and voltage balancing circuit. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 6219–6226. [Google Scholar]
- Guzman, R.; de Vicuña, L.G.; Morales, J.; Castilla, M.; Matas, J. Sliding-Mode Control for a Three-Phase Unity Power Fac-tor Rectifier Operating at Fixed Switching Frequency. IEEE Trans. Power Electron. 2016, 31, 758–769. [Google Scholar] [CrossRef] [Green Version]
- Wai, R.-J.; Yang, Y. Design of Backstepping Direct Power Control for Three-Phase PWM Rectifier. IEEE Trans. Ind. Appl. 2019, 55, 3160–3173. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X. Modeling and Control of Three-phase Voltage Source PWM Rectifier. In Proceedings of the 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; pp. 1–4. [Google Scholar]
- Thomas, G.H. A space vector-based rectifier regulator for AC/DC/AC converters. J. IEEE Trans. Power Electron. 1993, 8, 30–36. [Google Scholar]
- Shimizu, T.; Fujita, T.; Kimura, G.; Hirose, J. A unity power factor PWM rectifier with DC ripple compensation. IEEE Trans. Ind. Electron. 1997, 44, 447–455. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, C.W. Study on a new space voltage vector control method about reversible PWM converter. J. Proc. CSEE 2001, 21, 102–105. [Google Scholar]
- Khan, M.Z.; Naveed, M.M.; Hussain, D.M.A. Three phase six-switch PWM buck rectifier with power factor improvement. J. Phys. Conf. Ser. 2013, 439, 012028. [Google Scholar] [CrossRef] [Green Version]
- Conde-Enriques, J.; Benites-Read, J.S.; Duran-Gomez, J.L.; Pachecho-Sotelo, J.O. Three-phase six-pulse buck rectifier with high quality input waveforms. IEE Proc. Electr. Power Appl. 1999, 146, 637–645. [Google Scholar] [CrossRef]
- Razali, A.M.; Rahman, M. Performance analysis of three-phase PWM rectifier using direct power control. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 1603–1608. [Google Scholar] [CrossRef]
- Ding, X.; Qian, Z.; Xie, Y.; Lu, Z. Three Phase Z-Source Rectifier. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 June 2005; pp. 494–500. [Google Scholar]
- Shtessel, Y.; Baev, S.; Biglari, H. Unity Power Factor Control in Three-Phase AC/DC Boost Converter Using Sliding Modes. IEEE Trans. Ind. Electron. 2008, 55, 3874–3882. [Google Scholar] [CrossRef]
- Bhat, A.H.; Agarwal, P. A Comparative Evaluation of Three-Phase High Power Factor Boost Converters for Power Quality Improvement. In Proceedings of the 2006 IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; pp. 546–551. [Google Scholar] [CrossRef]
- da Vilela, S.M.; Vilela, J.A.; de Freitas, L.C.; Coelho, E.A.A.; Vieira, J.B.; de Farias, V.J. Proposal of a hysteresis control technique with almost constant frequency applied to the three phase boost converter. In Proceedings of the 2003 IEEE International Symposium on Industrial Electronics (Cat. No.03TH8692), Rio de Janeiro, Brazil, 9–11 June 2003; pp. 980–987. [Google Scholar]
- Malinowski, M.; Jasinski, M.; Kazmierkowski, M. Simple Direct Power Control of Three-Phase PWM Rectifier Using Space-Vector Modulation ( DPC-SVM). IEEE Trans. Ind. Electron. 2004, 51, 447–454. [Google Scholar] [CrossRef]
- Trinh, Q.; Choo, F.; Tang, Y.; Wang, P. A Control Strategy to Compensate for Current and Voltage Measurement Errors in Three-phase PWM Rectifiers. IEEE Trans. Ind. Appl. 2019, 55, 2879–2889. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Yang, H.; Fan, S. New Insights Into Model Predictive Control for Three-Phase Power Converters. IEEE Trans. Ind. Appl. 2018, 55, 1973–1982. [Google Scholar] [CrossRef]
- Chen, Z. PI and Sliding Mode Control of a Cuk Converter. IEEE Trans. Power Electron. 2012, 27, 3695–3703. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W. A sliding-mode controller with multi resonant sliding surface for sin-gle-phase grid connected vsi with an lcl filter. IEEE Trans. Power Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
- Liu, F.; Maswood, A.I. A Novel Variable Hysteresis Band Current Control of Three-Phase Three-Level Unity PF Rectifier with Constant Switching Frequency. IEEE Trans. Power Electron. 2006, 21, 1727–1734. [Google Scholar] [CrossRef]
- Lee, H.; Utkin, V.I.; Malinin, A. Chattering reduction using multiphase sliding mode control. Int. J. Control. 2009, 82, 1720–1737. [Google Scholar] [CrossRef]
- Abrishamifar, A.; Ahmad, A.; Mohamadian, M. Fixed switching frequency sliding mode control for single-phase uni-polar inverters. IEEE Trans. Power Electron. 2012, 27, 2507–2514. [Google Scholar] [CrossRef]
- Thangavelu, T.; Shanmugam, P.; Raj, K. Modelling and control of VIENNA rectifier a single phase approach. IET Power Electron. 2015, 8, 2471–2482. [Google Scholar] [CrossRef]
- Qiao, C.; Smedley, K.M. Three-phase unity-power-factor star-connected switch (vienna) rectifier with unified constant-frequency integration control. IEEE Trans. Power Electron. 2003, 18, 952–957. [Google Scholar] [CrossRef]
- Kolar, J.W.; Zach, F.C. A novel three-phase utility interface minimizing line current harmonics of high-power tele-communications rectifier modules. IEEE Trans. Ind. Electron. 1997, 44, 456–466. [Google Scholar] [CrossRef] [Green Version]
- Leibl, M.; Kolar, J.W.; Deuringer, J. Sinusoidal Input Current Discontinuous Conduction Mode Control of the VIENNA Rectifier. IEEE Trans. Power Electron. 2016, 32, 8800–8812. [Google Scholar] [CrossRef]
- Adhikari, J.; IV, P.; Panda, S.K. Reduction of Input Current Harmonic Distortions and Balancing of Output Voltages of the Vienna Rectifier Under Supply Voltage Disturbances. IEEE Trans. Power Electron. 2017, 32, 5802–5812. [Google Scholar] [CrossRef]
- Lee, J.-S.; Lee, K.-B. Predictive Control of Vienna Rectifiers for PMSG Systems. IEEE Trans. Ind. Electron. 2016, 64, 2580–2591. [Google Scholar] [CrossRef]
- Rajaei, A.; Mohamadian, M.; Varjani, A.Y. Vienna-Rectifier-Based Direct Torque Control of PMSG for Wind Energy Application. IEEE Trans. Ind. Electron. 2012, 60, 2919–2929. [Google Scholar] [CrossRef]
- Nussbaumer, T.; Kolar, J.W. Comparison of 3-Phase Wide Output Voltage Range PWM Rectifiers. IEEE Trans. Ind. Electron. 2007, 54, 3422–3425. [Google Scholar] [CrossRef]
- FBahamonde, F.; Blavi, H.V.; Salamero, L.M.; García, G. Control of a three-phase AC/DC VIENNA con-verter based on the sliding mode loss-free resistor approach. IET Power Electron. 2014, 7, 1073–1082. [Google Scholar]
- Lai, R.; Wang, F.; Burgos, R.; Boroyevich, D.; Jiang, D.; Zhang, D. Average Modeling and Control Design for VIEN-NA-Type Rectifiers Considering the DC-Link Voltage Balance. IEEE Trans. Power Electron. 2009, 24, 2509–2522. [Google Scholar]
- Lee, J.S.; Lee, K.B. A Novel Carrier-Based PWM Method for Vienna Rectifier with a Variable Power Factor. IEEE Trans. Power Electron. 2016, 63, 3–12. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, K.B. Time-Offset Injection Method for Neutral-Point AC Ripple Voltage Reduction in a Three-Level In-verter. IEEE Trans. Power Electron. 2016, 31, 1931–1941. [Google Scholar] [CrossRef]
- Hu, K.W.; Liaw, C.M. Development of a Wind Interior Permanent-Magnet Synchronous Generator-Based Microgrid and Its Operation Control. IEEE Trans. Power Electron. 2015, 30, 4973–4985. [Google Scholar]
- Lee, J.-S.; Lee, K.-B.; Blaabjerg, F. Predictive Control With Discrete Space-Vector Modulation of Vienna Rectifier for Driving PMSG of Wind Turbine Systems. IEEE Trans. Power Electron. 2019, 34, 12368–12383. [Google Scholar] [CrossRef]
- Etacheri, V.; Marom, R.; Elazari, R.; Salitra, G.; Aurbach, D. Challenges in the development of advanced Li-ion batteries: A review. Energy Environ. Sci. 2011, 4, 3243–3262. [Google Scholar] [CrossRef]
- Lukic, S.; Pantic, Z. Cutting the Cord: Static and Dynamic Inductive Wireless Charging of Electric Vehicles. IEEE Electrif. Mag. 2013, 1, 57–64. [Google Scholar] [CrossRef]
- Sasaki, S.; Tanaka, K.; Maki, K.-I. Microwave Power Transmission Technologies for Solar Power Satellites. Proc. IEEE 2013, 101, 1438–1447. [Google Scholar] [CrossRef]
- Mayordomo, I.; Dräger, T.; Spies, P.; Bernhard, J.; Pflaum, A. An Overview of Technical Challenges and Advances of In-ductive Wireless Power Transmission. Proc. IEEE 2013, 101, 1302–1311. [Google Scholar] [CrossRef]
- Sinha, S.; Regensburger, B.; Doubleday, K.; Kumar, A.; Pervaiz, S.; Afridi, K.K. High-power-transfer-density capacitive wireless power transfer system for electric vehicle charging. In Proceedings of the 2017 IEEE energy conversion congress and exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 967–974. [Google Scholar] [CrossRef]
- Nikitin, P.V.; Rao, K.; Lazar, S. An Overview of Near Field UHF RFID. In Proceedings of the 2007 IEEE International Conference on RFID, Grapevine, TX, USA, 26–28 March 2007; pp. 167–174. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Jang, Y.J.; Jeong, S.; Lee, M.S. Initial Energy Logistics Cost Analysis for Stationary, Quasi-Dynamic, and Dynamic Wireless Charging Public Transportation Systems. Energies 2016, 9, 483. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, A.A.S.; Lashway, C.R.; Mohammed, O. Modeling and Feasibility Analysis of Quasi-Dynamic WPT System for EV Applications. IEEE Trans. Transp. Electrif. 2017, 3, 343–353. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z.; Zhao, H.; Zhu, L.; Shuai, C.; Chen, Z. Wireless Power Transfer by Electric Field Resonance and its Application in Dynamic Charging. IEEE Trans. Ind. Electron. 2016, 63, 6602–6612. [Google Scholar] [CrossRef]
- AMoschoyiannis, S.; Maglaras, L.; Jiang, J.; Topalis, F.; Maglaras, A. Dynamic wireless charging of electric vehicles on the move with Mobile Energy Disseminators. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 239–251. [Google Scholar] [CrossRef] [Green Version]
- Bolger, J.; Kirsten, F.; Ng, L. Inductive power coupling for an electric highway system. In Proceedings of the 28th IEEE Vehicular Technology Conference, Denver, CO, USA, 22–24 March 1978; pp. 137–144. [Google Scholar] [CrossRef]
- Honda Accord Plug-in Hybrid|PluginCars.com. Available online: http://www.plugincars.com/honda-accord-plug-hybrid (accessed on 26 September 2017).
- Nam, I.; Dougal, R.; Santi, E. General optimal design method for series-series resonant tank in loosely-coupled wireless power transfer applications. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition-APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 857–866. [Google Scholar] [CrossRef]
- Vishnu, P.J.; Tummuru, N.R. A Phase Shift Control Strategy for Bidirectional Power Flow in Capacitive Wireless Power Transfer System Using LCLC Compensation. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Ning, S.; Yang, J.; Zhu, Q.; Su, M.; Tan, R.; Liu, Y. Comparative Analysis of LCL, LCLC, CLLC Compensation Networks for Capacitive Power Transfer. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018; pp. 1–6. [Google Scholar]
- Molina-Martínez, E.J.; Roncero-Sánchez, P.; López-Alcolea, F.J.; Vázquez, J.; Torres, A.P. Control Scheme of a Bidirec-tional Inductive Power Transfer System for Electric Vehicles Integrated into the Grid. Electronics 2020, 9, 1724. [Google Scholar] [CrossRef]
- Abramov, E.; Peretz, M.M. Multi-Loop Control for Power Transfer Regulation in Capacitive Wireless Systems by Means of Variable Matching Networks. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 2095–2110. [Google Scholar] [CrossRef]
- Sinha, S.; Afridi, K.K. Closed-loop Control of a Dynamic Capacitive Wireless Power Transfer System. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 17–20 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.; Tse, C.K.; Chen, Q. Load-Independent Duality of Current and Voltage Outputs of a Series- or Par-allel-Compensated Inductive Power Transfer Converter With Optimized Efficiency. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 137–146. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, F.; Yang, Z.; Liu, Z. Analysis of the Influence of Compensation Capacitance Errors of a Wireless Power Transfer System with SS Topology. Energies 2017, 10, 2177. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.-S.; Stielau, O.H.; Covic, G.A. Design considerations for a contactless electric vehicle battery charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- Yao, Y.; Liu, X.; Wang, Y.; Xu, D. LC/CL compensation topology and efficiency-based optimisation method for wireless power transfer. IET Power Electron. 2018, 11, 1029–1037. [Google Scholar] [CrossRef]
- Liu, C.; Ge, S.; Guo, Y.; Li, H.; Cai, G. Double-LCL resonant compensation network for electric vehicles wireless power transfer: Experimental study and analysis. IET Power Electron. 2016, 9, 2262–2270. [Google Scholar] [CrossRef]
- Aditya, K.; Williamson, S. Linearization and Control of Series-Series Compensated Inductive Power Transfer System Based on Extended Describing Function Concept. Energies 2016, 9, 962. [Google Scholar] [CrossRef] [Green Version]
- Peschiera, B.; Aditya, K.; Williamson, S.S. Asymmetrical voltage-cancellation control for a series-series fixed-frequency inductive power transfer system. In Proceedings of the IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 2971–2977. [Google Scholar] [CrossRef]
- Aditya, K.; Williamson, S.S. Comparative study on primary side control strategies for series-series compensated induc-tive power transfer system. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016; pp. 811–816. [Google Scholar]
- Gati, E.; Kampitsis, G.; Stavropoulos, I.; Papathanassiou, S.; Manias, S. Wireless Phase—Locked Loop control for inductive Power Transfer Systems. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1601–1607. [Google Scholar] [CrossRef]
- Esteban, B.; Sid-Ahmed, M.; Kar, N.C. A Comparative Study of Power Supply Architectures in Wireless EV Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6408–6422. [Google Scholar] [CrossRef]
- Pantic, Z.; Bai, S.; Lukic, S.M. ZCS $LCC$-Compensated Resonant Inverter for Inductive-Power-Transfer Application. IEEE Trans. Ind. Electron. 2010, 58, 3500–3510. [Google Scholar] [CrossRef]
- Zhang, W.; Mi, C.C. Compensation Topologies of High-Power Wireless Power Transfer Systems. IEEE Trans. Veh. Technol. 2015, 65, 4768–4778. [Google Scholar] [CrossRef]
- Wu, H.H.; Gilchrist, A.; Sealy, K.; Israelsen, P.; Muhs, J. Design of Symmetric Voltage Cancellation Control for LCL con-verters in Inductive Power Transfer Systems. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 866–871. [Google Scholar]
- Kim, D.-H.; Ahn, D. Self-Tuning LCC Inverter Using PWM-Controlled Switched Capacitor for Inductive Wireless Power Transfer. IEEE Trans. Ind. Electron. 2018, 66, 3983–3992. [Google Scholar] [CrossRef]
- Jiang, H.; Brazis, P.; Tabaddor, M.; Bablo, J. Safety considerations of wireless charger for electric vehicles—A review paper. In Proceedings of the 2012 IEEE Symposium on Product Compliance Engineering Proceedings, Portland, OR, USA, 5–7 November 2012; pp. 1–6. [Google Scholar]
- Xiang, L.; Zhu, Z.; Tian, J.; Tian, Y. Foreign Object Detection in a Wireless Power Transfer System Using Symmetrical Coil Sets. IEEE Access 2019, 7, 44622–44631. [Google Scholar] [CrossRef]
- Giler, E. WiTricity. Available online: https://www.ted.com/talks/eric_giler_demos_wireless_electricity (accessed on 10 March 2017).
- Zou, S.; Onar, O.C.; Galigekere, V.; Pries, J.; Su, G.-J.; Khaligh, A. Secondary Active Rectifier Control Scheme for a Wireless Power Transfer System with Double-Sided LCC Compensation Topology. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2145–2150. [Google Scholar] [CrossRef]
- Rashid, M.H. Power Electronics Handbook; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- Rashid, M.H. Power Electronics: Circuits, Devices, and Applications; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Corcau, J.-I.; Dinca, L. Experimental tests regarding the functionality of a DC to DC Boost Converter. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 579–582. [Google Scholar] [CrossRef]
- Al Sakka, M.; Van Mierlo, J.; Gualous, H. DC/DC Converters for Electric Vehicles, Electric Vehicles. Electr. Veh. Model. Simul. 2011, 100, 466. [Google Scholar]
- Kazimierczuk, M.K. Pulse-Width Modulated DC-DC Power Converters; Wiley: Hoboken, NJ, USA, 2008; ISBN 9780470773017. [Google Scholar]
- Seo, S.-W.; Choi, H.H. Digital Implementation of Fractional Order PID-Type Controller for Boost DC–DC Converter. IEEE Access 2019, 7, 142652–142662. [Google Scholar] [CrossRef]
- Banerjee, S.; Chakrabarty, K. Nonlinear modeling and bifurcations in the boost converter. IEEE Trans. Power Electron. 1998, 13, 252–260. [Google Scholar] [CrossRef] [Green Version]
- Beg, O.A.; Abbas, H.; Johnson, T.T.; Davoudi, A. Model validation of PWM DC-DC converter. IEEE Trans. Ind. Electron. 2017, 64, 7049–7059. [Google Scholar] [CrossRef]
- di Bernardo, M.; Vasca, F. Discrete-time maps for the analysis of bifurcations and chaos in DC/DC converters. IEEE Trans. Circuits Syst. I Regul. Pap. 2000, 47, 130–143. [Google Scholar] [CrossRef]
- Cafagna, D.; Grassi, G. Bifurcation Analysis and Chaotic Behavior in Boost Converters: Experimental Results. Nonlinear Dyn. 2006, 44, 251–262. [Google Scholar] [CrossRef]
- Rajashekara, K. Power conversion and control strategies for fuel cell vehicles. In Proceedings of the IECON’03, 29th Annual Conference of the IEEE Industrial Electronics Society (IEEE Cat. No.03CH37468), Roanoke, VA, USA, 2–6 November 2003; Volume 3, pp. 2865–2870. [Google Scholar]
- Kong, X.; Choi, L.T.; Khambadkone, A. Analysis and control of isolated current-fed full bridge converter in fuel cell system. In Proceedings of the 30th Annual Conference of IEEE Industrial Electronics Society, Busan, Korea, 2–6 November 2005. [Google Scholar] [CrossRef]
- Dhanasekaran, S.; Kumar, E.S.; Vijaybalaji, R. Different Methods of Control Mode in Switch Mode Power Supply—A Comparison. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 6717–6724. [Google Scholar]
- Yasoda, S.S.K. Optimization and Closed Loop Control of Soft Switched Boost Converter with Flyback Snubber. Int. J. Comput. Appl. 2013, 975, 8887. [Google Scholar]
- Tan, S.-C.; Lai, Y.M.; Tse, C.K. Indirect Sliding Mode Control of Power Converters Via Double Integral Sliding Surface. IEEE Trans. Power Electron. 2008, 23, 600–611. [Google Scholar] [CrossRef] [Green Version]
- Yazici, I.; Yaylaci, E.K. Fast and robust voltage control of DC–DC boost converter by using fast terminal sliding mode controller. IET Power Electron. 2016, 9, 120–125. [Google Scholar] [CrossRef]
- Cheng, L.; Acuna, P.; Aguilera, R.P.; Jiang, J.; Wei, S.; Fletcher, J.E.; Lu, D.D.C. Model Predictive Control for DC–DC Boost Converters With Reduced-Prediction Horizon and Constant Switching Frequency. IEEE Trans. Power Electron. 2017, 33, 9064–9075. [Google Scholar] [CrossRef]
- Mardani, M.M.; Khooban, M.H.; Masoudian, A.; Dragicevic, T. Model predictive control of DC-DC converters to miti-gate the effects of pulsed power loads in naval DC microgrids. IEEE Trans. Ind. Electron. 2019, 66, 5676–5685. [Google Scholar] [CrossRef] [Green Version]
- Wei, Q.; Wu, B.; Xu, D.; Zargari, N.R. Model Predictive Control of Capacitor Voltage Balancing for Cascaded Modular DC–DC Converters. IEEE Trans. Power Electron. 2016, 32, 752–761. [Google Scholar] [CrossRef]
- Beid, S.E.; Doubabi, S. DSP-based implementation of fuzzy output tracking control for a boost converter. IEEE Trans. Ind. Electron. 2014, 61, 196–206. [Google Scholar] [CrossRef]
- Chung, G.-B.; Kwack, S.-G. Application of fuzzy integral control for output regulation of asymmetric half-bridge DC/DC converter with current doubler rectifier. J. Power Electron. 2007, 7, 238–245. [Google Scholar]
- Guo, L.; Hung, J.Y.; Nelms, R.M. Evaluation of DSP-based PID and fuzzy controllers for DC–DC converters. IEEE Trans. Ind. Electron. 2009, 56, 2237–2248. [Google Scholar]
- Bouarroudj, N.; Boukhetala, D.; Benlahbib, B.; Batoun, B. Sliding model control based on fractional order calculus for DC-DC converters. Int. J. Math. Model. Comput. 2015, 5, 319–333. [Google Scholar]
- Kumar, J.; Kumar, V.; Rana, K.P.S. A fractional order fuzzy PDCI controller for three-link electrically driven rigid ro-botic manipulator system. J. Intell. Fuzzy Syst. 2018, 35, 5287–5299. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Faraj, K.S.; Hussein, J.F. Analysis and Comparison of DC-DC Boost Converter and Interleaved DC-DC Boost Converter. Int. J. Eng. Technol. 2020, 38, 622–635. [Google Scholar] [CrossRef]
- Kolli, A.; Gaillard, A.; De Bernardinis, A.; Bethoux, O.; Hissel, D.; Khatir, Z. A review on DC/DC converter architectures for power fuel cell applications. Energy Convers. Manag. 2015, 105, 716–730. [Google Scholar] [CrossRef]
- Zhang, H.; Ma, R.; Han, C.; Xie, R.; Liang, B.; Li, Y. Advanced Control Design of Interleaved Boost Converter for Fuel Cell Applications. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 5000–5005. [Google Scholar] [CrossRef]
- Xie, Y.; Ghaemi, R.; Sun, J.; Freudenberg, J.S. Model Predictive Control for a Full Bridge DC/DC Converter. IEEE Trans. Control. Syst. Technol. 2011, 20, 164–172. [Google Scholar] [CrossRef]
- Xu, Q.; Jiang, W.; Blaabjerg, F.; Zhang, C.; Zhang, X.; Fernando, T. Backstepping Control for Large Signal Stability of High Boost Ratio Interleaved Converter Interfaced DC Microgrids With Constant Power Loads. IEEE Trans. Power Electron. 2019, 35, 5397–5407. [Google Scholar] [CrossRef]
- Saadi, R.; Bahri, M.; Ayad, M.Y.; Becherif, M.; Kraa, O.; Aboubou, A. Implementation and dual loop control of two phases interleaved boost converter for fuel cell applications. In Proceedings of the 3rd International Symposium on Environmental Friendly Energies and Applications (EFEA), Paris, France, 19–21 November 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Giral, R.; Martinez-Salamero, L.; Leyva, R.; Maixe, J. Sliding-mode control of interleaved boost converters. IEEE Trans. Circuits Syst. I: Fundam. Theory Appl. 2000, 47, 1330–1339. [Google Scholar]
- Cid-Pastor, A.; Giral, R.; Calvente, J.; Utkin, V.I.; Martinez-Salamero, L. Interleaved Converters Based on Sliding-Mode Control in a Ring Configuration. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 2566–2577. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Chang, X.; Li, Y.; Zhang, W.; Wang, N.; Xue, W. Active Disturbance Rejection Control for a Flywheel Energy Storage System. IEEE Trans. Ind. Electron. 2015, 62, 991–1001. [Google Scholar] [CrossRef]
- Ma, R.; Xu, L.; Xie, R.; Zhao, D.; Huangfu, Y.; Gao, F. Advanced Robustness Control of DC–DC Converter for Proton Ex-change Membrane Fuel Cell Applications. IEEE Trans. Ind. Appl. 2019, 55, 6389–6400. [Google Scholar] [CrossRef]
- Varshney, A.; Kumar, R.; Kuanr, D.; Gupta, M. Soft-Switched Boost DC-DC Converter System for Electric Vehicles Using an Auxiliary Resonant Circuit. Inter. J. Emerg. Technol. Adv. Eng. 2014, 4, 845–850. [Google Scholar]
- Lin, B.-R.; Chao, C.-H. Soft-Switching Converter with Two Series Half-Bridge Legs to Reduce Voltage Stress of Active Switches. IEEE Trans. Ind. Electron. 2012, 60, 2214–2224. [Google Scholar] [CrossRef]
- Zhang, X.; Bai, H.; Zhou, X. Soft switching DC-DC converter control using FBLSMC and frequency modulation in HESS based electric vehicle. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2209–2213. [Google Scholar] [CrossRef]
- Song, I.; Jung, D.; Ji, Y.; Choi, S.; Jung, Y.; Won, C. A Soft Switching Boost Converter using an Auxiliary Resonant Circuit for a PV System. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2838–2843. [Google Scholar]
- Sreelakshmi, S.; Mohan Krishna, S.; Deepa, K. Bidirectional Converter Using Fuzzy for Battery Charging of Electric Vehicle. In Proceedings of the IEEE Transportation Electrification Conference (ITEC-India), Bengaluru, India, 17–19 December 2019; pp. 1–6. [Google Scholar]
- Veerachary, M. Digital controller design for fourth-order soft-switching boost converte. In Proceedings of the IEEE 7th International Conference on Industrial and Information Systems, Chennai, India, 6–9 August 2012; pp. 1–5. [Google Scholar]
- Veerachary, M.; Sekhar, R. Digital voltage-mode controller design for high gain soft-switching boost converter. In Proceedings of the 2010 Joint International Conference on Power Electronics, Drives and Energy Systems & 2010 Power India, New Delhi, India, 20–23 December 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Mummadi, V. Design of robust digital PID controller for H-bridge softswitching boost converter. IEEE Trans. Ind. Electron. 2011, 58, 2883–2897. [Google Scholar] [CrossRef]
- Ramachandran, R.; Nymand, M. Loss Modelling and Experimental Verification of A 98.8% Efficiency Bidirectional Isolated DC-DC Converter. E3S Web Conf. 2017, 16, 18003. [Google Scholar] [CrossRef] [Green Version]
- Averberg, A.; Mertens, A. Analysis of a Voltage-fed Full Bridge DC-DC Converter in Fuel Cell Systems. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 286–292. [Google Scholar] [CrossRef]
- Saeed, J.; Hasan, A. Control-oriented discrete-time large-signal model of phase-shift full-bridge DC–DC converter. Electr. Eng. 2017, 100, 1431–1439. [Google Scholar] [CrossRef]
- Kim, B.-S.; Kim, H.-J.; Jin, C.; Huh, D.-Y. A digital controlled DC-DC converter for electric vehicle applications. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Taeed, F.; Nymand, M. Modeling and control of isolated full bridge boost DC-DC converter implemented in FPGA. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–25 April 2013; pp. 119–124. [Google Scholar] [CrossRef]
- Madhavi, S.V.; Das, G.T.R. Comparative Study of Controllers for an Isolated Full Bridge Boost Converter To-pology in Fuel Cell Applications. Int. J. Power Electron. Drive Syst. 2018, 9, 1644–1656. [Google Scholar]
- Peng, F.; Li, H.; Su, G.-J.; Lawler, J. A New ZVS Bidirectional DC–DC Converter for Fuel Cell and Battery Application. IEEE Trans. Power Electron. 2004, 19, 54–65. [Google Scholar] [CrossRef]
- Bronstein, S.; Ben-Yaakov, S. Design considerations for achieving ZVS in a half bridge inverter that drives a piezoelectric transformer with no series inductor. In Proceedings of the IEEE Annual Power Electronics Specialists Conference, Cairns, Australia, 23–27 June 2002; IEEE Computer Society: Washington, DC, USA; pp. 585–590. [Google Scholar] [CrossRef]
- Pahlevaninezhad, M.; Das, P.; Drobnik, J.; Jain, P.K.; Bakhshai, A. A Novel ZVZCS Full-Bridge DC/DC Converter Used for Electric Vehicles. IEEE Trans. Power Electron. 2012, 27, 2752–2769. [Google Scholar] [CrossRef]
- Jeon, S.-J.; Cho, G.-H. A zero-voltage and zero-current switching full bridge DC-DC converter with transformer isolation. IEEE Trans. Power Electron. 2001, 16, 573–580. [Google Scholar] [CrossRef] [Green Version]
- Cho, J.-G.; Baek, J.-W.; Jeong, C.-Y.; Rim, G.-H. Novel zero-voltage and zero-current-switching full-bridge PWM converter using a simple auxiliary circuit. IEEE Trans. Ind. Appl. 1999, 35, 15–20. [Google Scholar] [CrossRef] [Green Version]
- Hamada, S.; Gamage, L.; Morimoto, T.; Nakaoka, M. A novel zero-voltage and zero-current soft-switching PWM DC-DC converter with reduced conduction losses. IEEE Trans. Power Electron. 2002, 2, 741–747. [Google Scholar] [CrossRef]
- Kim, J.; Song, H.; Nam, K. Asymmetric Duty Control of a Dual-Half-Bridge DC/DC Converter for Single-Phase Distrib-uted Generators. IEEE Trans. Power Electron. 2011, 26, 973–982. [Google Scholar] [CrossRef]
- Miftakhutdinov, R.; Nemchinov, A.; Meleshin, V.; Fraidlin, S. Modified asymmetrical ZVS half-bridge DC-DC converter. In Proceedings of the APEC’99. Fourteenth Annual Applied Power Electronics Conference and Exposition. 1999 Conference Proceedings (Cat. No. 99CH36285), Dallas, TX, USA, 14–18 March 1999; Volume 1, pp. 567–574. [Google Scholar] [CrossRef]
- Chen, W.; Xu, P.; Lee, F. The optimization of asymmetric half bridge converter. In Proceedings of the APEC 2001. Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No. 01CH37181), Anaheim, CA, USA, 4–8 March 2002. [Google Scholar] [CrossRef]
- Mao, H.; Abu-Qahouq, J.; Luo, S.; Batarseh, I. Zero-voltage-switching half-bridge DC-DC converter with modi-fied PWM control method. IEEE Trans. Power Electron. 2004, 19, 947–958. [Google Scholar] [CrossRef]
- Mao, H.; Abu-Qahouq, J.; Luo, S.; Batarseh, I. New zero-voltage-switching half-bridge DC-DC converter and PWM control method. In Proceedings of the Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition, Miami Beach, FL, USA, 9–13 February 2004. [Google Scholar] [CrossRef]
- Xie, M.; Huangfu, Y.; Zhang, Q.; Li, Q.; Zhao, D.; Liu, Y. Small Signal Analysis and Control Design of Snubberless Natu-rally Clamped ZCS/ZVS Current-Fed Half-Bridge DC/DC Converter for EV. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 4998–5004. [Google Scholar]
- Zhang, N.; Sutanto, D.; Muttaqi, K.M. A review of topologies of three-port DC–DC converters for the integration of renew-able energy and energy storage system. Renew. Sustain. Energy Rev. 2016, 56, 388–401. [Google Scholar] [CrossRef] [Green Version]
- Al-chlaihawi, S.J.M. Multiport Converter in Electrical Vehicles—A Review. Int. J. Sci. Res. Publ. 2016, 6, 378–382. [Google Scholar]
- Zhao, C.; Round, S.D.; Kolar, J.W. An Isolated Three-Port Bidirectional DC-DC Converter with Decoupled Power Flow Management. IEEE Trans. Power Electron. 2008, 23, 2443–2453. [Google Scholar] [CrossRef]
- Zeng, J.; Qiao, W.; Qu, L.; Jiao, Y. An Isolated Multiport DC/DC Converter for Simultaneous Power Management of Multi-ple Different Renewable Energy Sources. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 70–78. [Google Scholar] [CrossRef]
- Li, W.; Xiao, J.; Zhao, Y.; He, X. PWM Plus Phase Angle Shift (PPAS) Control Scheme for Combined Multiport DC/DC Converters. IEEE Trans. Power Electron. 2011, 27, 1479–1489. [Google Scholar] [CrossRef]
- Saeed, L.; Khan, M.Y.A.; Khan, S.H.; Azhar, M. Design and Control for a Multiport DC-DC Boost Converter with Battery Backup for Microgrid. In Proceedings of the 2019 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 21–22 February 2019; pp. 1–6. [Google Scholar]
- Rashidi, M.; Altin, N.N.; Ozdemir, S.S.; Bani-Ahmed, A.; Nasiri, A. Design and Development of a High-Frequency Mul-tiport Solid-State Transformer with Decoupled Control Scheme. IEEE Trans. Ind. Appl. 2019, 55, 7515–7526. [Google Scholar] [CrossRef]
- Hegazy, O.; Barrero, R.; Van Mierlo, J.; Lataire, P.; Omar, N.; Coosemans, T. An Advanced Power Electronics Interface for Electric Vehicles Applications. IEEE Trans. Power Electron. 2013, 28, 5508–5521. [Google Scholar] [CrossRef]
- Hegazy, O.; Van Mierlo, J.; Lataire, P. Analysis, modeling, and implementation of a multidevice interleaved DC/DC con-verter for fuel cell hybrid electric vehicles. IEEE Trans. Power Electron. 2012, 27, 4445–4458. [Google Scholar] [CrossRef]
- Farakhor, A. Non-isolated multi-input–single-output DC/DC converter for photovoltaic power generation systems. IET Power Electron. 2014, 7, 2806–2816. [Google Scholar]
- Wu, H.; Xing, Y.; Xia, Y.; Sun, K. A family of non-isolated three-port converters for stand-alone renewable power system. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 1030–1035. [Google Scholar]
- Wu, H.; Sun, K.; Ding, S.; Xing, Y. Topology Derivation of Nonisolated Three-Port DC–DC Converters from DIC and DOC. IEEE Trans. Power Electron. 2012, 28, 3297–3307. [Google Scholar] [CrossRef]
- Nahavandi, A.; Hagh, M.T.; Sharifian, M.B.B.; Danyali, S. A Nonisolated Multiinput Multioutput DC–DC Boost Converter for Electric Vehicle Applications. IEEE Trans. Power Electron. 2014, 30, 1818–1835. [Google Scholar] [CrossRef]
- Samosir, A.; Taufiq; Shafie, A.; Yatim, A. Simulation and Implementation of Interleaved boost dc-dc converter for fuel cell application. Int. J. Power Electron. Drive Syst. 2011, 1, 168–174. [Google Scholar] [CrossRef]
- Ho, C.N.-M.; Breuninger, H.; Pettersson, S.; Escobar, G.; Serpa, L.A.; Coccia, A. Practical Design and Implementation Proce-dure of an Interleaved Boost Converter Using SiC Diodes for PV Applications. Power Electron. IEEE Trans. 2012, 27, 2835–2845. [Google Scholar] [CrossRef]
- Ayoubi, Y.; Elsied, M.; Oukaour, A.; Chaoui, H.; Slamani, Y.; Gualous, H. Four-phase interleaved DC/DC boost converter in-terfaces for super-capacitors in electric vehicle application based on advanced sliding mode control design. Electr. Power Syst. Res. 2016, 134, 186–196. [Google Scholar] [CrossRef]
- Hegazy, O.; Van Mierlo, J.; Lataire, P. Analysis, control and comparison of DC/DC boost converter topologies for fuel cell hybrid electric vehicle applications. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Smith, N.; McCann, R. Analysis and simulation of a multiple input interleaved boost converter for renewable energy applications. In Proceedings of the 2014 IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Veerachary, M.; Senjyu, T.; Uezato, K. Neural-network-based maximum-power-point tracking of coupled-inductor in-terleaved-boost-converter-supplied PV system using fuzzy controller. IEEE Trans. Ind. Electron. 2003, 50, 749–758. [Google Scholar] [CrossRef] [Green Version]
- So, W.; Tse, C.; Lee, Y. A fuzzy controller for DC-DC converters. IEEE Trans. Power Electron. 2002, 1, 315–320. [Google Scholar] [CrossRef]
- Gupta, T.; Boudreaux, R.; Nelms, R.; Hung, J. Implementation of a fuzzy controller for DC-DC converters using an inexpensive 8-b microcontroller. IEEE Trans. Ind. Electron. 1997, 44, 661–669. [Google Scholar] [CrossRef]
- Mattavelli, P.; Rossetto, L.; Spiazzi, G.; Tenti, P. General-purpose fuzzy controller for DC/DC converters. IEEE Trans. Power Electron. 2002, 12, 79–86. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.-F.; Chang, C.-H.; Chen, Y.-H. A fuzzy-logic-controlled single-stage converter for PV-powered lighting system applications. IEEE Trans. Ind. Electron. 2000, 47, 287–296. [Google Scholar] [CrossRef]
- Josefsson, O. Energy Efficiency Comparison between Two-Level and Multilevel Inverters for Electric Vehicle Applications; 27753488; Chalmers Tekniska Hogskola (Sweden) ProQuest Dissertations Publishing: Gothenburg, Sweden, 2013. [Google Scholar]
- Josefsson, O. Investigation of a Multilevel Inverter for Electric Vehicle Applications; Chalmers Tekniska Hogskola: Gothenburg, Sweden, 2015. [Google Scholar]
- Capasso, C.; Veneri, O. Experimental analysis on the performance of lithium based batteries for road full electric and hybrid vehicles. Appl. Energy 2014, 136, 921–930. [Google Scholar] [CrossRef]
- Dunn, B.; Kamath, H.; Tarascon, J.-M. Electrical Energy Storage for the Grid: A Battery of Choices. Science 2011, 334, 928–935. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Liang, J.; Yang, Z.; Li, G. A Review of Lithium-Ion Battery for Electric Vehicle Applications and Beyond. Energy Procedia 2019, 158, 4363–4368. [Google Scholar] [CrossRef]
- Manzetti, S.; Mariasiu, F. Electric vehicle battery technologies: From present state to future systems. Renew. Sustain. Energy Rev. 2015, 51, 1004–1012. [Google Scholar] [CrossRef]
- Yi, T.-F.; Mei, J.; Zhu, Y.-R. Key strategies for enhancing the cycling stability and rate capacity of LiNi0.5Mn1.5O4 as high-voltage cathode materials for high power lithium-ion batteries. J. Power Sources 2016, 316, 85–105. [Google Scholar] [CrossRef]
- Marongiu, A.; Nussbaum, F.; Waag, W.; Garmendia, M.; Sauer, D.U. Comprehensive study of the influence of aging on the hysteresis behavior of a lithium iron phosphate cathode-based lithium-ion battery—An experimental investigation of the hysteresis. Appl. Energy 2016, 171, 629–645. [Google Scholar] [CrossRef]
- Park, M.; Shin, D.-S.; Ryu, J.; Choi, M.; Park, N.; Hong, S.Y.; Cho, J. Organic-Catholyte-Containing Flexible Rechargeable Lithium Batteries. Adv. Mater. 2015, 27, 5141–5146. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.; Mohamed, A. Model development of charge equalization controller for lithium-ion battery. Adv. Sci. Lett. 2017, 23, 5255–5259. [Google Scholar] [CrossRef]
- de Santiago, J.; Bernhoff, H.; Ekergård, B.; Eriksson, S.; Ferhatovic, S.; Waters, R.; Leijon, M. Electrical Motor Drivelines in Commercial AllElectric Vehicles: A Review. IEEE Trans. Veh. Technol. 2012, 61, 475–484. [Google Scholar] [CrossRef] [Green Version]
- Bubert, A.; Oberdieck, K.; Xu, H.; De Doncker, R.W. Experimental Validation of Design Concepts for Future EV-Traction Inverters. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 795–802. [Google Scholar] [CrossRef]
- Wikipedia. Power Semiconductor Device. 2012. Available online: http://en.wikipedia.org/wiki/Power_semiconductor_device (accessed on 20 June 2020).
- Vemuganti, H.P.; Sreenivasarao, D.; Ganjikunta, S.K.; Suryawanshi, H.M.; Abu-Rub, H. A Survey on Reduced Switch Count Multilevel Inverters. IEEE Open J. Ind. Electron. Soc. 2021, 2, 80–111. [Google Scholar] [CrossRef]
- Curkovic, M.; Jezernik, K.; Horvat, R. FPGA-Based Predictive Sliding Mode Controller of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 60, 637–644. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Lipo, T.A.; Kwon, B. A novel topology for a voltage source inverter with reduced transistor count and utilizing naturally commutated thyristors with simple commutation. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 643–648. [Google Scholar] [CrossRef]
- Kumar, K.V.; Michael, P.A.; John, J.P.; Kumar, S.S. Simulation and comparison of SPWM and SVPWM control for three phase inverter. ARPN J. Eng. Appl. Sci. 2010, 5, 61–74. [Google Scholar]
- Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F.; Irwin, J.D. Control in Power Electronics: Selected Problems; Academic: New York, NY, USA, 2002. [Google Scholar]
- Kennel, R.; Linder, A.; Linke, M. Generalized predictive control (GPC)—Ready for use in drive applications? In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference (IEEE Cat. No. 01CH37230), Vancouver, BC, Canada, 17–21 June 2001; Volume 4, pp. 1839–1844. [Google Scholar]
- Bhattacharjee, T.; Jamil, M.; Jana, A. Design of SPWM based three phase inverter model. In Proceedings of the IEEE 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; pp. 1–6. [Google Scholar]
- YingYing, J.; XuDong, W.; LiangLiang, M.; ShuCai, Y.; HaiXing, Z. Application and Simulation of SVPWM in three phase inverter. In Proceedings of the 2011 IEEE 6th International Forum on Strategic Technology, Harbin, China, 22–24 August 2011; Volume 1, pp. 541–544. [Google Scholar]
- Rivera, M.; Morales, F.; Baier, C.; Munoz, J.; Tarisciotti, L.; Zanchetta, P.; Wheeler, P. A modulated model predictive con-trol scheme for a two-level voltage source inverter. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 2224–2229. [Google Scholar]
- Leon, J.I.; Vazquez, S.; Franquelo, L.G. Multilevel Converters: Control and Modulation Techniques for Their Operation and Industrial Applications. Proc. IEEE 2017, 105, 2066–2081. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S.S. Modular multilevel converters for transportation electrification: Challenges and oppor-tunities. IEEE Trans. Transp. Electrific. 2018, 4, 399–407. [Google Scholar] [CrossRef]
- Hinago, Y.; Koizumi, H. A single-phase multilevel inverter using switched series/parallel dc voltage sources. IEEE Trans. Ind. Electron. 2010, 57, 2643–2650. [Google Scholar] [CrossRef]
- Gupta, K.K.; Jain, S. A Novel Multilevel Inverter Based on Switched DC Sources. IEEE Trans. Ind. Electron. 2013, 61, 3269–3278. [Google Scholar] [CrossRef]
- Tolbert, L.M.; Peng, F.Z.; Habetler, T.G. Multilevel inverters for electric vehicle applications. In Proceedings of the Power Electronics in Transportation (Cat. No. 98TH8349), Gdansk, Poland, 27–30 June 2011; pp. 79–84. [Google Scholar]
- Nabae, A.; Takahashi, I.; Akagi, H. A new neutral-pointclamped PWM inverter. IEEETrans. Ind. Appl. 1981, IA-17, 518–523. [Google Scholar] [CrossRef]
- Ounejjar, Y.; Al-Haddad, K.; Gregoire, L.-A. Packed U cells multilevel converter topology: Theoretical study and ex-perimental validation. IEEE Trans. Ind. Electron. 2011, 58, 1294–1306. [Google Scholar] [CrossRef]
- Escalante, M.; Vannier, J.-C.; Arzande, A. Flying capacitor multilevel inverters and DTC motor drive applications. IEEE Trans. Ind. Electron. 2002, 49, 809–815. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Lipo, T.A. A novel cascaded two transistor H-bridge multilevel voltage source converter topology. In Proceedings of the 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; pp. 40–45. [Google Scholar] [CrossRef]
- Hasan, N.S.; Rosmin, N.; Osman, D.A.A.; Musta’amal, A.H. Reviews on multilevel converter and modulation techniques. Renew. Sustain. Energy Rev. 2017, 80, 163–174. [Google Scholar] [CrossRef]
- Richardeau, F.; Pham, T.T.L. Reliability Calculation of Multilevel Converters: Theory and Applications. IEEE Trans. Ind. Electron. 2012, 60, 4225–4233. [Google Scholar] [CrossRef]
- Choudhury, A.; Pillay, P. Space Vector Based Capacitor Voltage Balancing for a Three-Level NPC Traction Inverter Drive. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1276–1286. [Google Scholar] [CrossRef]
- Malarvizhi, M.; Nagarajan, R.; Meenakshi, M.; Banupriya, R. Unipolar Sine Multicarrier SPWM Control Strategies for Seven-Level Cascaded Inverter. Int. J. Emerg. Technol. Eng. Res. 2018, 6, 111–117. [Google Scholar]
- Gupta, A.K.; Khambadkone, A.M. A Space Vector PWM Scheme for Multilevel Inverters Based on Two-Level Space Vector PWM. IEEE Trans. Ind. Electron. 2006, 53, 1631–1639. [Google Scholar] [CrossRef]
- Colak, I.; Bayindir, R.; Kabalci, E. A modified harmonic mitigation analysis using Third Harmonic Injection PWM in a multilevel inverter control. In Proceedings of the 14th International Power Electronics and Motion Control Conference, Ohrid, Macedonia, 6–8 September 2010; pp. 215–220. [Google Scholar]
- Rafin, S.M.S.H.; Lipo, T.A.; Kwon, B.I. Performance analysis of the three-transistor voltage source inverter using different PWM techniques. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015. [Google Scholar]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and Challenges of Switched Reluctance Motor Drives for Electric Propulsion: A Comparative Study. IEEE Trans. Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Popescu, M.; Foley, I.; Staton, D.A.; Goss, J.E. Multi-Physics Analysis of a High Torque Density Motor for Electric Racing Cars. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 6537–6544. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles. Proc. of the IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.N.; Parsa, L.; Dorrell, D. Automotive Electric Propulsion Systems with Reduced or No Permanent Magnets: An Overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Yilmaz, M. Limitations/capabilities of electric machine technologies and modeling approaches for electric motor design and analysis in plug-in electric vehicle applications. Renew. Sustain. Energy Rev. 2015, 52, 80–99. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Knight, A.M.; Popescu, M.; Evans, L.; Staton, D.A. Comparison of different motor design drives for hybrid electric vehicles. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3352–3359. [Google Scholar] [CrossRef]
- Zeraoulia, M.; Benbouzid, M.E.H.; Diallo, D. Electric Motor Drive Selection Issues for HEV Propulsion Systems: A Comparative Study. IEEE Trans. Veh. Technol. 2006, 55, 1756–1764. [Google Scholar] [CrossRef]
- Ramarathnam, S.; Mohammed, A.K.; Bilgin, B.; Sathyan, A.; Dadkhah, H.; Emadi, A. A Review of Structural and Thermal Analysis of Traction Motors. IEEE Trans. Transp. Electrif. 2015, 1, 255–265. [Google Scholar] [CrossRef]
- Fessler, R.R. Final report on assessment of motor technologies for traction drives of hybrid and electric vehicles. Oa-Kridge Nat. Lab. Oakridge TN Tech. Rep. 2011, 10, 2018. [Google Scholar]
- Ehsani, M.; Rahman, K.; Toliyat, H. Propulsion system design of electric and hybrid vehicles. IEEE Trans. Ind. Electron. 1997, 44, 19–27. [Google Scholar] [CrossRef]
- Kamiya, M. Development of Traction Drive Motors for the Toyota Hybrid System. IEEJ Trans. Ind. Appl. 2006, 126, 473–479. [Google Scholar] [CrossRef] [Green Version]
- Momen, F.; Rahman, K.; Son, Y. Electrical propulsion system design of Chevrolet Bolt battery electric vehicle. IEEE Trans. Ind. Appl. 2019, 55, 376–384. [Google Scholar] [CrossRef]
- Iwai, A.; Honjo, S.; Suzumori, H.; Okazawa, T. Development of Traction Motor for New Zero—Emission Vehicle. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018. [Google Scholar] [CrossRef]
- Namiki, K.; Murota, K.; Shorji, M. High Performance Motor and Inverter System for a Newly Developed Electric Vehicle; SAE Technical Paper 2018-01-0461; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- El-Refaie, A.; Jahns, T. Optimal flux weakening in surface PM machines using concentrated windings. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004. [Google Scholar] [CrossRef]
- Gan, J.; Chau, K.T.; Chan, C.C.; Jiang, J.Z. A new surface-inset, permanent-magnet, brushless DC motor drive for electric vehicles. IEEE Trans. Magn. 2000, 36, 3810–3818. [Google Scholar]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of Permanent-Magnet Brushless Drives for Electric and Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef] [Green Version]
- Nerg, J.; Rilla, M.; Ruuskanen, V.; Pyrhönen, J.; Ruotsalainen, S. Direct-Driven Interior Magnet Permanent-Magnet Syn-chronous Motors for a Full Electric Sports Car. IEEE Trans. Ind. Electron. 2014, 61, 4286–4294. [Google Scholar] [CrossRef] [Green Version]
- Parsa, L.; Toliyat, H.A. Fault-Tolerant Interior-Permanent-Magnet Machines for Hybrid Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2007, 56, 1546–1552. [Google Scholar] [CrossRef]
- Honda, Y.; Nakamura, T.; Higaki, T.; Takeda, Y. Motor design considerations and test results of an interior permanent magnet synchronous motor for electric vehicles. In Proceedings of the IAS’97. Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual Meeting, New Orleans, LA, USA, 5–9 October 2002. [Google Scholar] [CrossRef]
- Makni, Z.; Besbes, M.; Marchand, C. Multiphysics design metholodology of permanent-magnet syncrhonous motors. IEEE Trans. Veh. Technol. 2007, 56, 1524–1530. [Google Scholar] [CrossRef]
- Kiyota, K.; Sugimoto, H.; Chiba, A. Comparing Electric Motors: An Analysis Using Four Standard Driving Schedules. IEEE Ind. Appl. Mag. 2014, 20, 12–20. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Atallah, K. Design Optimization of a Surface-Mounted Permanent-Magnet Motor with Concentrated Windings for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2012, 62, 1053–1064. [Google Scholar] [CrossRef]
- Gerada, D.; Mebarki, A.; Brown, N.L.; Gerada, C.; Cavagnino, A.; Boglietti, A. High-Speed Electrical Machines: Technolo-gies, Trends, and Developments. IEEE Trans. Ind. Electron. 2014, 61, 2946–2959. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Ali, Q.; Khan, S.; Lipo, T.A. A novel two-layer winding topology for sub-harmonic synchronous machines. Electr. Eng. 2022, 104, 3027–3035. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Ali, Q.; Lipo, T.A. A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology. World Electr. Veh. J. 2022, 13, 16. [Google Scholar] [CrossRef]
- Kiyota, K.; Chiba, A. Design of Switched Reluctance Motor Competitive to 60-kW IPMSM in Third-Generation Hybrid Electric Vehicle. IEEE Trans. Ind. Appl. 2012, 48, 2303–2309. [Google Scholar] [CrossRef]
- Throne, D.; Martinez, F.; Marguire, R.; Arens, D. Integrated Motor/Drive Technology with Rockwell Connectivity; Tech. Rep.; Rexroth, Bosch Group: Lohr am Main, Germany; Available online: http://www.cmafh.com/enewsletter/PDFs/IntegratedMotorDrives.pdf (accessed on 20 March 2021).
- März, M.; Schimanek, E.; Billmann, M. Towards an integrated drive for hybrid traction. In Proceedings of the CPES Power Electronic Conference, Blacksburg, VA, USA, 17–20 April 2005; pp. 1–5. [Google Scholar]
- Zhang, H.; Wang, J. Active Steering Actuator Fault Detection for An Automatically-steered Electric Ground Vehicle. IEEE Trans. Veh. Technol. 2017, 66, 3685–3702. [Google Scholar] [CrossRef]
- Meng, F.; Zhang, H.; Cao, D.; Chen, H. System modeling and pressure control of a clutch actuator for heavy-duty auto-matic transmission systems. IEEE Trans. Veh. Technol. 2016, 65, 4865–4874. [Google Scholar] [CrossRef]
- Sun, W.; Pan, H.; Gao, H. Filter-Based Adaptive Vibration Control for Active Vehicle Suspensions With Electrohydraulic Actuators. IEEE Trans. Veh. Technol. 2015, 65, 4619–4626. [Google Scholar] [CrossRef]
- Martins, I.; Esteves, J.; Marques, G.; da Silva, F.P. Permanent-Magnets Linear Actuators Applicability in Automobile Active Suspensions. IEEE Trans. Veh. Technol. 2006, 55, 86–94. [Google Scholar] [CrossRef] [Green Version]
- Abebe, R.; Vakil, G.; Calzo, G.L.; Cox, T.; Lambert, S.; Johnson, M.; Gerada, C.; Mecrow, B. Integrated motor drives: State of the art and future trends. IET Electr. Power Appl. 2016, 10, 757–771. [Google Scholar] [CrossRef] [Green Version]
- Brown, N.R.; Jahns, T.M.; Lorenz, R.D. Power converter design for an integrated modular motor drive. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 1322–1328. [Google Scholar]
- März, M.; Poech, M.H.; Schimanek, E.; Schletz, A. Mechatronic integration into the hybrid powertrain—The thermal challenge. In Proceedings of the International Conference Automotive Power Electronics (APE), Tegernsee, Germany, 4–6 October 2006; pp. 1–6. [Google Scholar]
- Wang, J.; Li, Y.; Han, Y. Integrated Modular Motor Drive Design with GaN Power FETs. IEEE Trans. Ind. Appl. 2015, 51, 3198–3207. [Google Scholar] [CrossRef]
- Shea, A.; Jahns, T.M. Hardware integration for an integrated modular motor drive including distributed control. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 4881–4887. [Google Scholar] [CrossRef]
- Mahrous, E.; Rahim, N.; Hew, W. Three-phase three-level voltage source inverter with low switching frequency based on the two-level inverter topology. IET Electr. Power Appl. 2007, 1, 637–641. [Google Scholar] [CrossRef] [Green Version]
- Rajeevan, P.P.; Sivakumar, K.; Patel, C.; Ramchand, R.; Gopakumar, K. A Seven-Level Inverter Topology for Induction Motor Drive Using Two-Level Inverters and Floating Capacitor Fed H-Bridges. IEEE Trans. Power Electron. 2010, 26, 1733–1740. [Google Scholar] [CrossRef]
- Bilgin, B.; Magne, P.; Malysz, P.; Yang, Y.; Pantelic, V.; Preindl, M.; Korobkine, A.; Jiang, W.; Lawford, M.; Emadi, A. Making the Case for Electrified Transportation. IEEE Trans. Transp. Electrif. 2015, 1, 4–17. [Google Scholar] [CrossRef]
- Kanechika, M.; Uesugi, T.; Kachi, T. Advanced SiC and GaN power electronics for automotive systems. In Proceedings of the 2010 International Electron Devices Meeting, San Francisco, CA, USA, 6–8 December 2010; pp. 324–327. [Google Scholar] [CrossRef]
- Kachi, T.; Kikuta, D.; Uesugi, T. GaN power device and reliability for automotive applications. In Proceedings of the 2012 IEEE International Reliability Physics Symposium (IRPS), Anaheim, CA, USA, 15–19 April 2012; p. 3D-1. [Google Scholar] [CrossRef]
- Wang, R.; Boroyevich, D.; Ning, P.; Wang, Z.; Wang, F.; Mattavelli, P.; Ngo, K.D.T.; Rajashekara, K. A high-temperature SiC three-phase AC—DC converter design for >100 °C ambient temperature. IEEE Trans. Power Electron. 2013, 28, 555–572. [Google Scholar] [CrossRef]
- Hamada, K. Present status and future prospects for electronics in EVs/HEVs and expectations for wide bandgap semicon-ductor devices. Mater. Sci. Forum 2009, 600, 889–893. [Google Scholar]
- Chang, T.-C.; Chang, J.-Y.; Chuang, T.-H.; Lo, W.-C. Dual-phase solid-liquid interdiffusion bonding, a solution for the die attachment of WBG. In Proceedings of the 2012 14th International Conference on Electronic Materials and Packaging (EMAP), Hong Kong, China, 13–16 December 2012; pp. 1–5. [Google Scholar]
- Zhang, H.; Ge, B.; Liu, Y.; Bayhan, S.; Balog, R.S.; Abu-Rub, H. Comparison of GaN and SiC power devices in application to MW-scale quasi-Z-source cascaded multilevel inverters. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Kinzer, D. Unlocking the power of GaN. In Proceedings of the IEEE Applied Power Electronics Conference (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 1–22. Available online: https://www.psma.com/sites/default/files/uploads/techforumssemiconductor/presentations/is164-unlocking-power-gan.pdf (accessed on 18 December 2022).
- Sfakianakis, G.E.; Everts, J.; Lomonova, E.A. Overview of the requirements and implementations of bidirectional iso-lated AC-DC converters for automotive battery charging applications. In Proceedings of the 2015 Tenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 31 March–2 April 2015; pp. 1–12. [Google Scholar]
- Ikeda, N.; Niiyama, Y.; Kambayashi, H.; Sato, Y.; Nomura, T.; Kato, S.; Yoshida, S. GaN Power Transistors on Si Substrates for Switching Applications. Proc. IEEE 2010, 98, 1151–1161. [Google Scholar] [CrossRef]
- Eull, M.; Preindl, M.; Emadi, A. Analysis and design of a high efficiency, high power density three-phase silicon carbide inverter. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Colmenares, J.; Peftitsis, D.; Rabkowski, J.; Sadik, D.-P.; Tolstoy, G.; Nee, H.-P. High efficiency 312-kVA three-phase in-verter using parallel connection of silicon carbide MOSFET power modules. IEEE Trans. Ind. Appl. 2015, 51, 4664–4676. [Google Scholar] [CrossRef]
- Zhu, J.; Kim, H.; Chen, H.; Erickson, R.; Maksimovic, D. High efficiency sic traction inverter for electric vehicle applications. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 1428–1433. [Google Scholar]
- Casady, J.; Olejniczak, K.; McNutt, T.; Simco, D.; Passmore, B.; Shaw, R.; Martin, D.; Curbow, A.; Hull, B.; Palmour, J. 88 Kilowatt Automotive Inverter with New 900 Volt Silicon Carbide MOSFET Technology; Cree, Inc.: Fayetteville, AR, USA, 2017. [Google Scholar]
- Huang, A.Q. Power semiconductor devices for smart grid and renewable energy systems. Proc. IEEE 2017, 105, 2019–2047. [Google Scholar] [CrossRef]
- Heckel, T.; Rettner, C.; Marz, M. Fundamental efficiency limits in power electronic systems. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Han, D.; Ogale, A.; Li, S.; Li, Y.; Sarlioglu, B. Efficiency characterization and thermal study of GaN based 1 kW inverter. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition-APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 2344–2350. [Google Scholar] [CrossRef]
- Han, D.; Noppakunkajorn, J.; Sarlioglu, B. Comprehensive efficiency, weight, and volume comparison of SiC- and Si-based bidirectional DC–DC converters for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3001–3010. [Google Scholar] [CrossRef]
- Swamy, M.M.; Kang, J.; Shirabe, K. Power loss, system efficiency, and leakage current comparison between Si IGBT VFD and SiC FET VFD with various filtering options. IEEE Trans. Ind. Appl. 2015, 51, 3858–3866. [Google Scholar] [CrossRef]
- Shirabe, K.; Swamy, M.M.; Kang, J.K.; Hisatsune, M.; Wu, Y.; Kebort, D.; Honea, J. Efficiency comparison between Si-IGBT-based drive and GaN-based drive. IEEE Trans. Ind. Appl. 2014, 50, 566–572. [Google Scholar] [CrossRef]
- Shirabe, K.; Swamy, M.; Kang, J.-K.; Hisatsune, M.; Das, M.; Callanan, R.; Lin, H. Design of 400V class inverter drive using SiC 6-in-1 power module. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2363–2370. [Google Scholar] [CrossRef]
- Shirabe, K.; Swamy, M.; Kang, J.-K.; Hisatsune, M.; Wu, Y.; Kebort, D.; Honea, J. Advantages of high frequency PWM in AC motor drive applications. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2977–2984. [Google Scholar] [CrossRef]
- Semiconductor, R. Physical Properties and Characteristics of SiC. 2019. Available online: https://www.rohm.com/electronics-basics/sic/what-are-sic-semiconductors (accessed on 22 September 2021).
- Ueda, D.; Hikita, M.; Nakazawa, S.; Nakazawa, K.; Ishida, H.; Yanagihara, M.; Inoue, K.; Ueda, T.; Uemoto, Y.; Tanaka, T.; et al. Present and future prospects of gan-based power electronics. In Proceedings of the 2008 9th International Conference on Solid-State and Integrated-Circuit Technology, Beijing, China, 20–23 October 2008; pp. 1078–1081. [Google Scholar] [CrossRef]
- Roberts, J. Lateral GaN transistors—A replacement for IGBT devices in automotive applications. In Proceedings of the PCIM Europe 2014; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 20–22 May 2014; pp. 310–317. [Google Scholar]
- Chowdhury, S. GaN Electronics for Next Generation Cars. IEEE Transp. Electrific. Community 2014. Available online: https://tec.ieee.org/newsletter/november-december-2014/gan-electronics-for-next-generation-cars (accessed on 22 September 2021).
- Mitova, R.; Ghosh, R.; Mhaskar, U.; Klikic, D.; Wang, M.-X.; Dentella, A. Investigations of 600-V GaN HEMT and GaN Diode for Power Converter Applications. IEEE Trans. Power Electron. 2013, 29, 2441–2452. [Google Scholar] [CrossRef]
- Regensburger, B.; Kumar, A.; Sinha, H.; Afridi, K. High-Performance 13.56-MHz Large Air-Gap Capacitive Wireless Power Transfer System for Electric Vehicle Charging. In Proceedings of the 2018 IEEE 19th Workshop on Control and Modeling for Power Electronics (COMPEL), Padua, Italy, 25–28 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Schumann, P.; Diekhans, T.; Blum, O.; Brenner, U.; Henkel, A. Compact 7 kW inductive charging system with circular coil design. In Proceedings of the 2015 5th International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 15–16 September 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Choi, J.; Tsukiyama, D.; Tsuruda, Y.; Rivas, J. 13.56 MHz 1.3 kW resonant converter with GaN FET for wireless power transfer. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Choi, J.; Tsukiyama, D.; Rivas, J. Comparison of SiC and eGaN devices in a 6.78 MHz 2.2 kW resonant inverter for wire-less power transfer. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar]
- Ye, H.; Magne, P.; Bilgin, B.; Wirasingha, S.; Emadi, A. A comprehensive evaluation of bidirectional boost converter to-pologies for electrified vehicle applications. In Proceedings of the IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 2914–2920. [Google Scholar]
- Wrzecionko, B.; Bortis, D.; Kolar, J.W. A 120 °C ambient temperature forced air-cooled normally-off SiC JFET automo-tive inverter system. IEEE Trans. Power Electron. 2014, 29, 2345–2358. [Google Scholar] [CrossRef]
- Zhang, X.; Yao, C.; Li, C.; Fu, L.; Guo, F.; Wang, J. A Wide Bandgap Device-Based Isolated Quasi-Switched-Capacitor DC/DC Converter. IEEE Trans. Power Electron. 2013, 29, 2500–2510. [Google Scholar] [CrossRef]
- Pinkos, A.F.; Guo, Y. Automotive design challenges for wide-bandgap devices used in high temperature capable, scalable power vehicle electronics. In Proceedings of the 2013 IEEE Energytech, Cleveland, OH, USA, 21–23 May2013; pp. 1–5. [Google Scholar]
- Jahns, T.M. University of Wisconsin-Madison The Past, Present, and Future of Power Electronics Integration Technology in Motor Drives. CPSS Trans. Power Electron. Appl. 2017, 2, 197–216. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Lipo, T.A.; Kwon, B.I. Novel matrix converter topologies with reduced transistor count. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1078–1085. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Islam, R.; Mohammed, O.A. Overview of Power Electronic Converters in Electric Vehicle Applications. In Proceedings of the 2023 Fourth International Symposium on 3D Power Electronics Integration and Manufacturing (3D-PEIM), Miami, FL, USA, 1–3 February 2023. [Google Scholar]
- Rafin, S.M.S.H.; Haque, M.A.; Islam, R.; Mohammed, O.A. A Review of Power Electronics Converters for Electronics Aircrafts. In Proceedings of the 2023 Fourth International Symposium on 3D Power Electronics Integration and Manufacturing (3D-PEIM), Miami, FL, USA, 1–3 February 2023. [Google Scholar]
- Rafin, S.M.S.H.; Islam, R.; Mohammed, O.A. Power Electronic Converters for Wind Power Generation. In Proceedings of the 2023 Fourth International Symposium on 3D Power Electronics Integration and Manufacturing (3D-PEIM), Miami, FL, USA, 1–3 February 2023. [Google Scholar]
- Rafin, S.M.S.H.; Ahmed, R.; Mohammed, O.A. Wide Band Gap Semiconductor Devices for Power Electronic Converters. In Proceedings of the 2023 Fourth International Symposium on 3D Power Electronics Integration and Manufacturing (3D-PEIM), Miami, FL, USA, 1–3 February 2023. [Google Scholar]
- Soliman, A.S.; Amin, M.M.; El-Sousy, F.F.M.; Mohammad, O.A. A Data-Driven Based Online Learning Control of Voltage Source Converter for DC Microgrids. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Bari, Italy, 7–10 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Silliman, A.S.; Helal, I.; Emarah, A. Operation of multi-terminal voltage source converter (VSC-HVDC) transmission system with ripple mitigation. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1505–1511. [Google Scholar] [CrossRef]
- Soliman, A.S.; Saad, A.A.; Mohammed, O. Securing Networked Microgrids with DNP3 Protocol. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 7–10 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Amin, M.M.; Soliman, A.S.; El-Sousy, F.F.M.; Mohammed, O.A. A Novel Front-End Single-Stage Bridgeless Boost Converter for Grid Integration of Multisource DC-Microgrid Applications. In Proceedings of the 2022 IEEE Industry Applications Society Annual Meeting (IAS), Detroit, MI, USA, 9–14 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Soliman, A.S.; Amin, M.M.; El-Sousy, F.F.M.; Mohammad, O.A. Robust Artificial NN-based Tracking Control Implementation of Grid-Connected AC-DC Rectifier for DC Microgrids Performance Enhancement. In Proceedings of the IECON 2022—48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Soliman, A.S.; Amin, M.M.; El-Sousy, F.F.M.; Mohammad, O. Experimental Validation for Artificial Data-Driven Tracking Control for Enhanced Three-Phase Grid-Connected Boost Rectifier in DC Microgrids. IEEE Trans. Ind. Appl. 2022, 1–17. [Google Scholar] [CrossRef]






































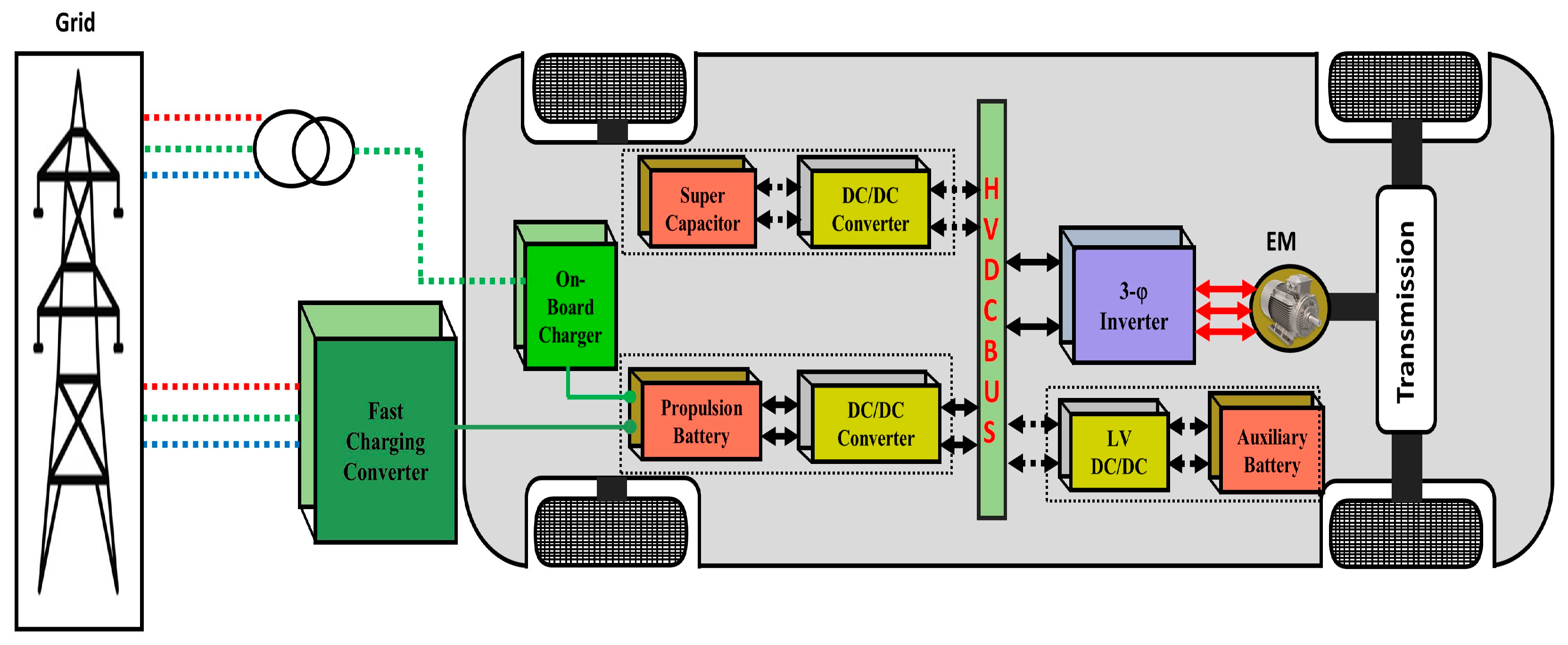{kind=link}
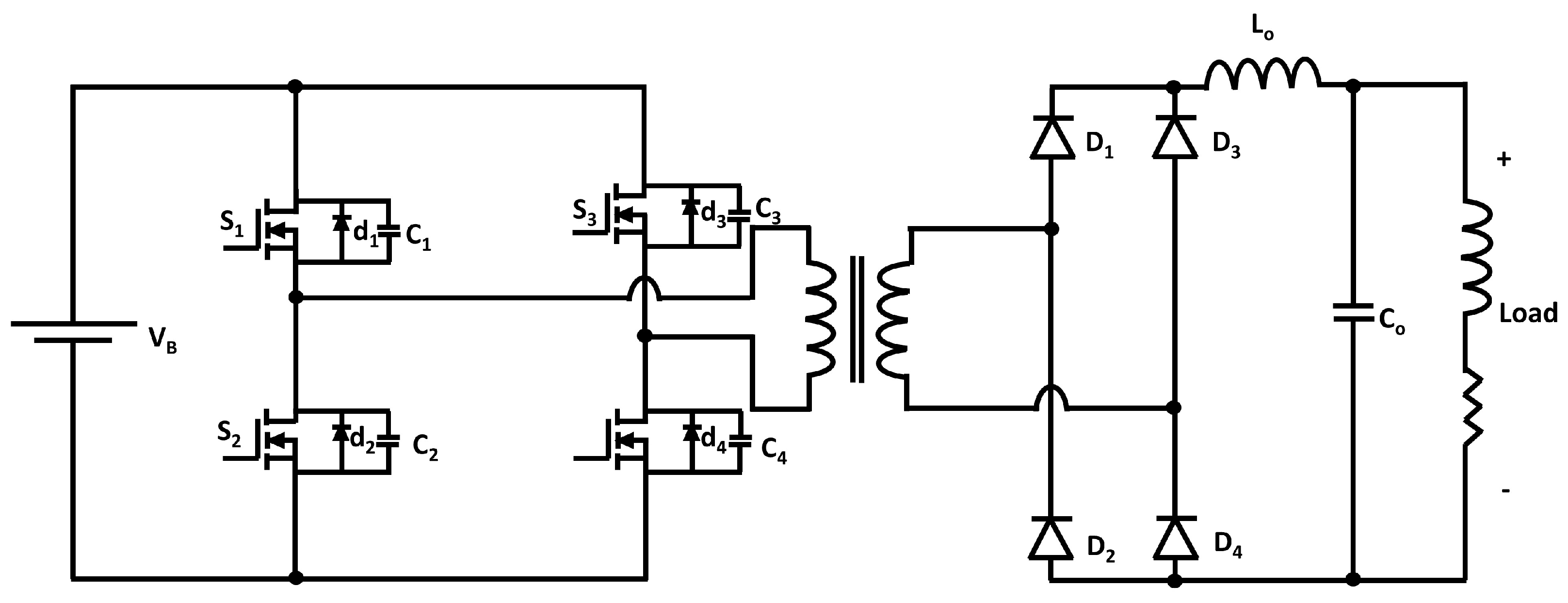{kind=link}
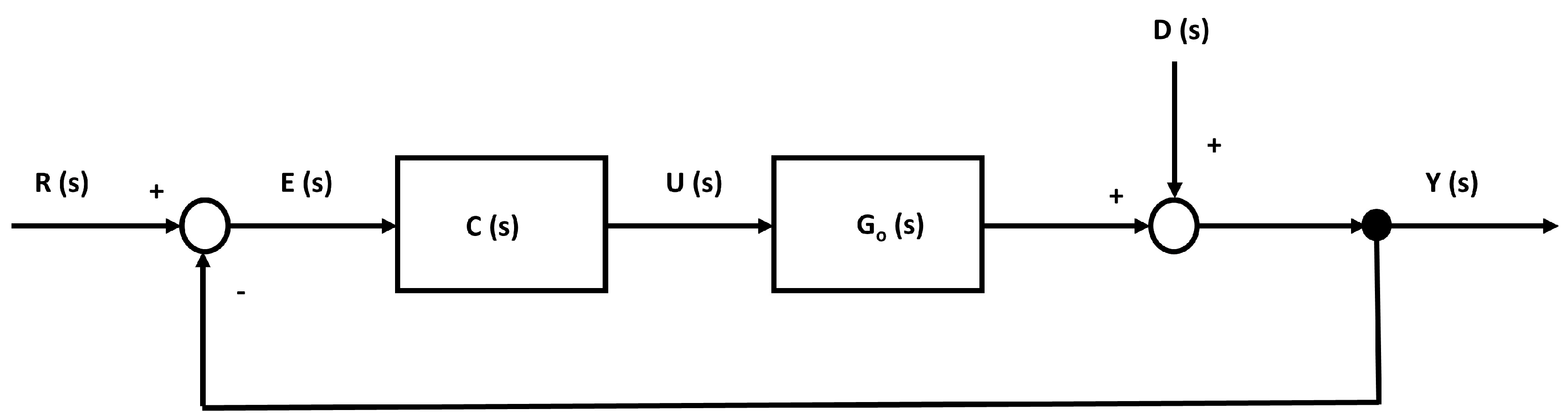{kind=link}
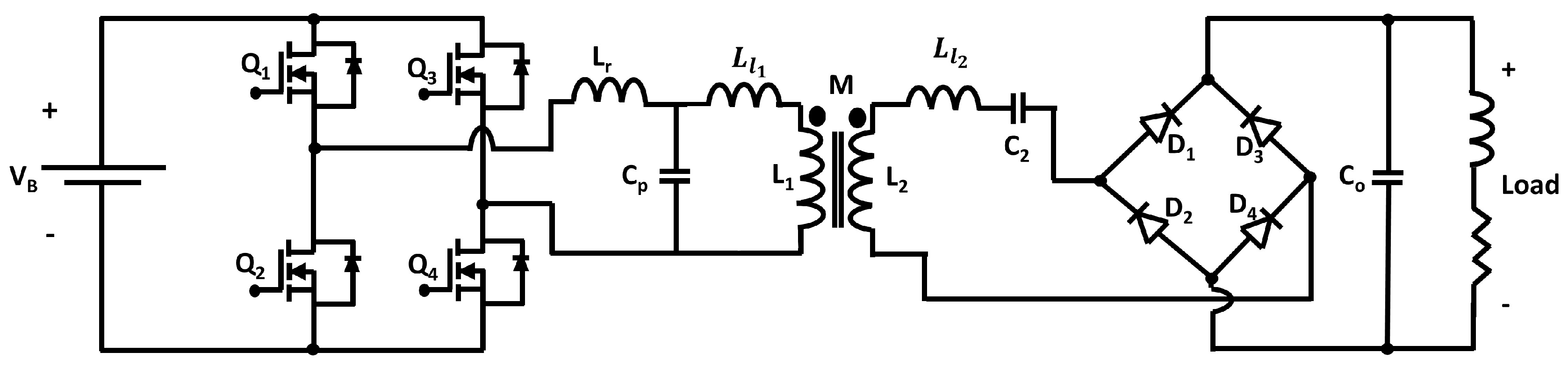{kind=link}
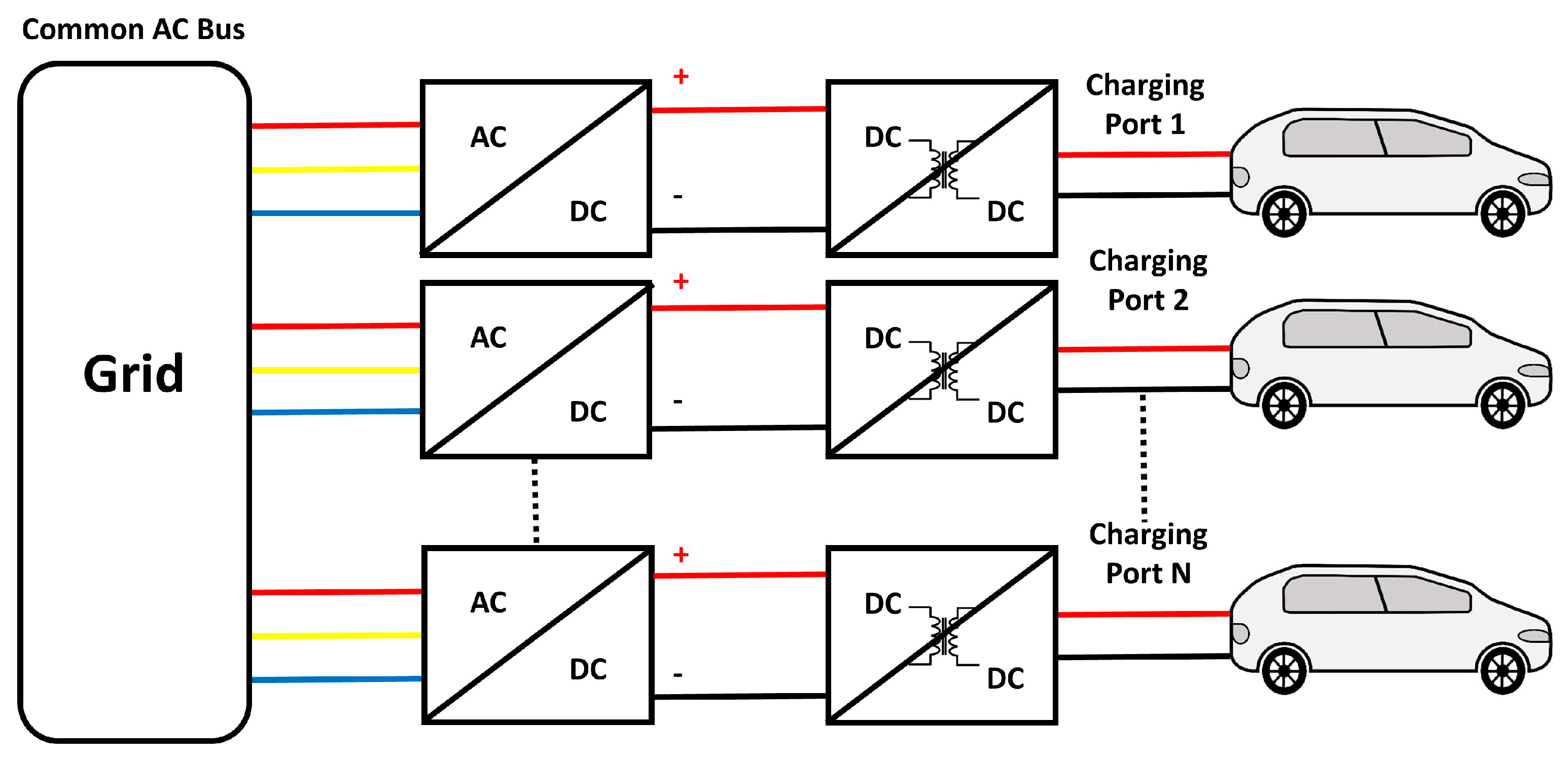{kind=link}
{kind=link}
{kind=link}
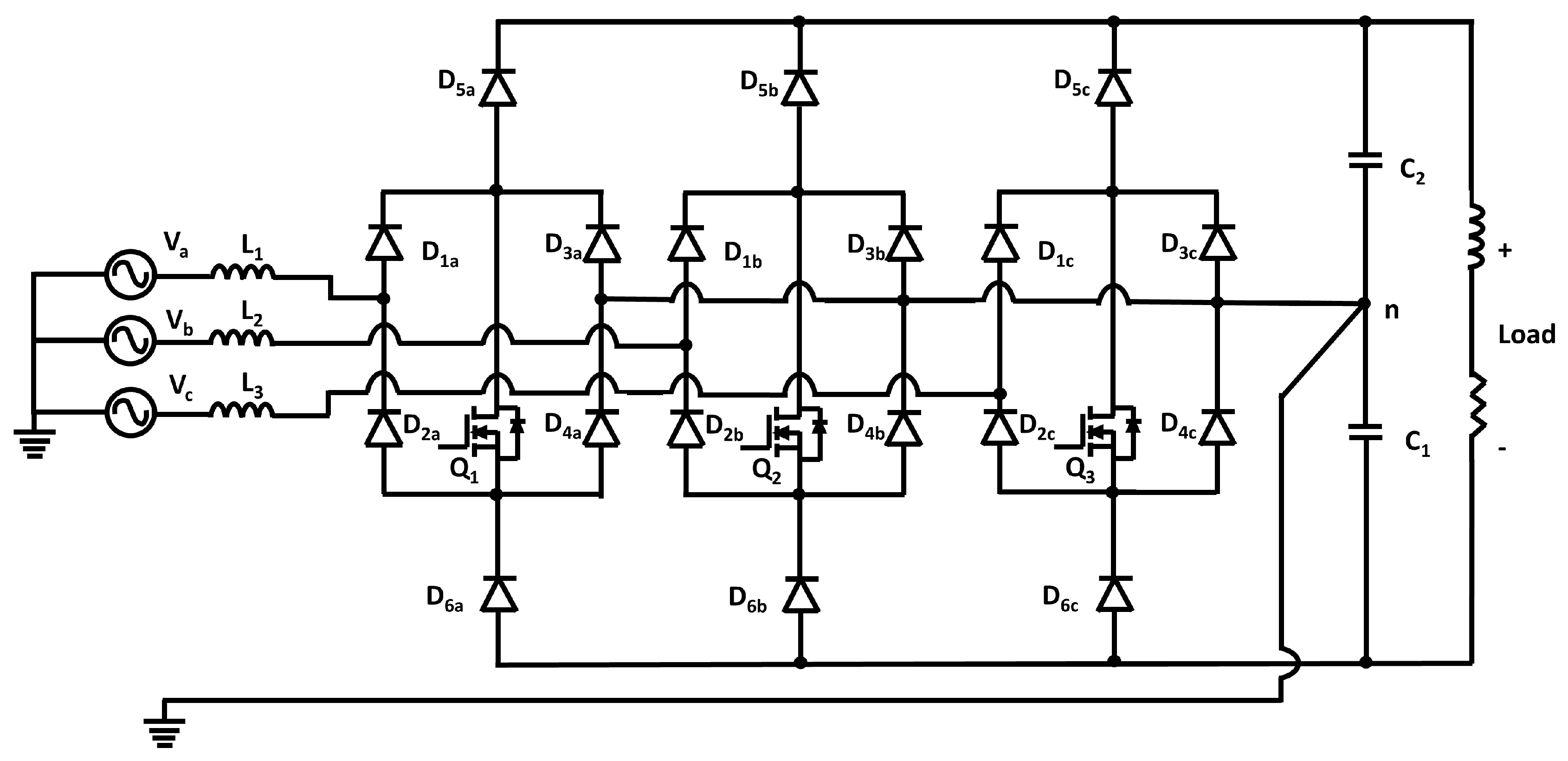{kind=link}
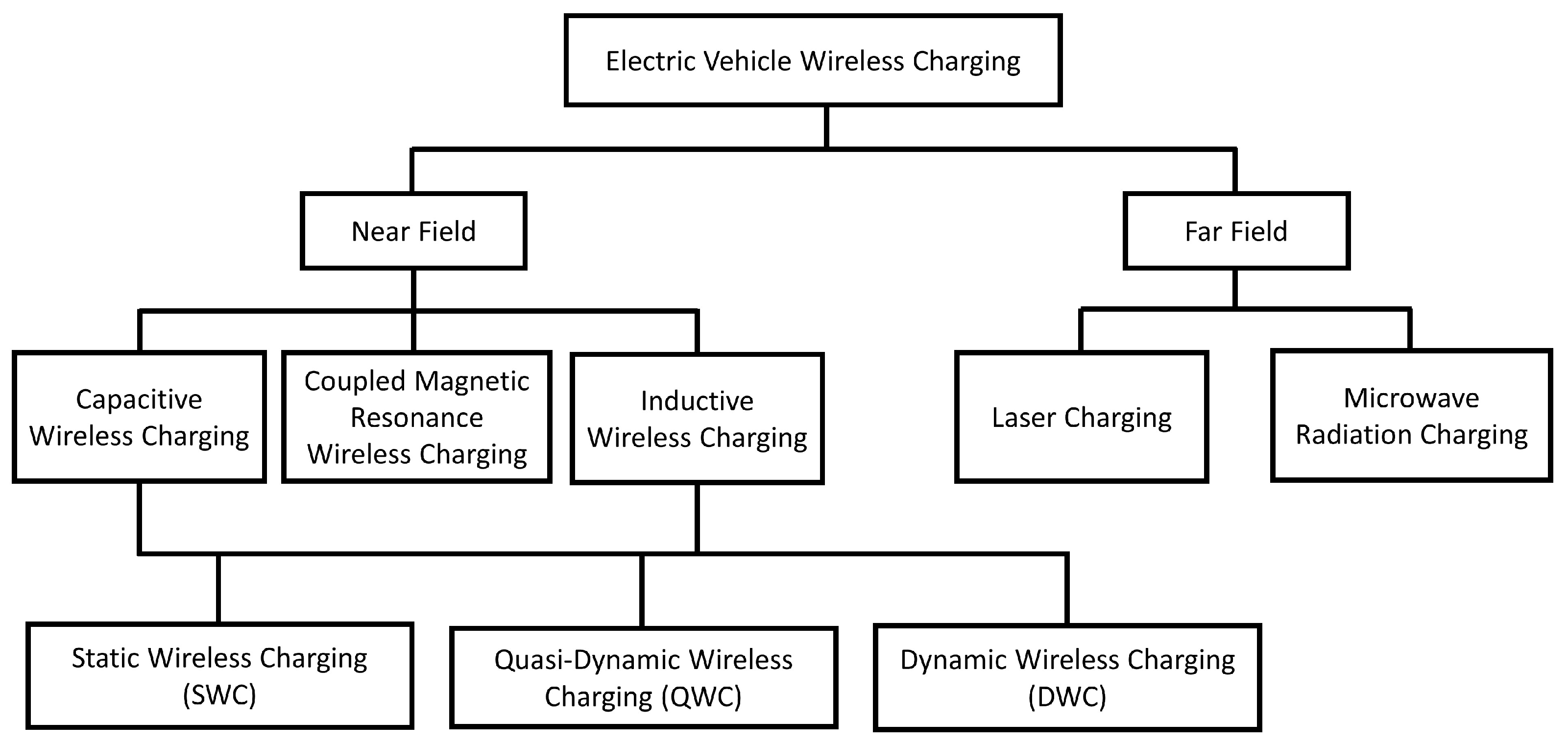{kind=link}
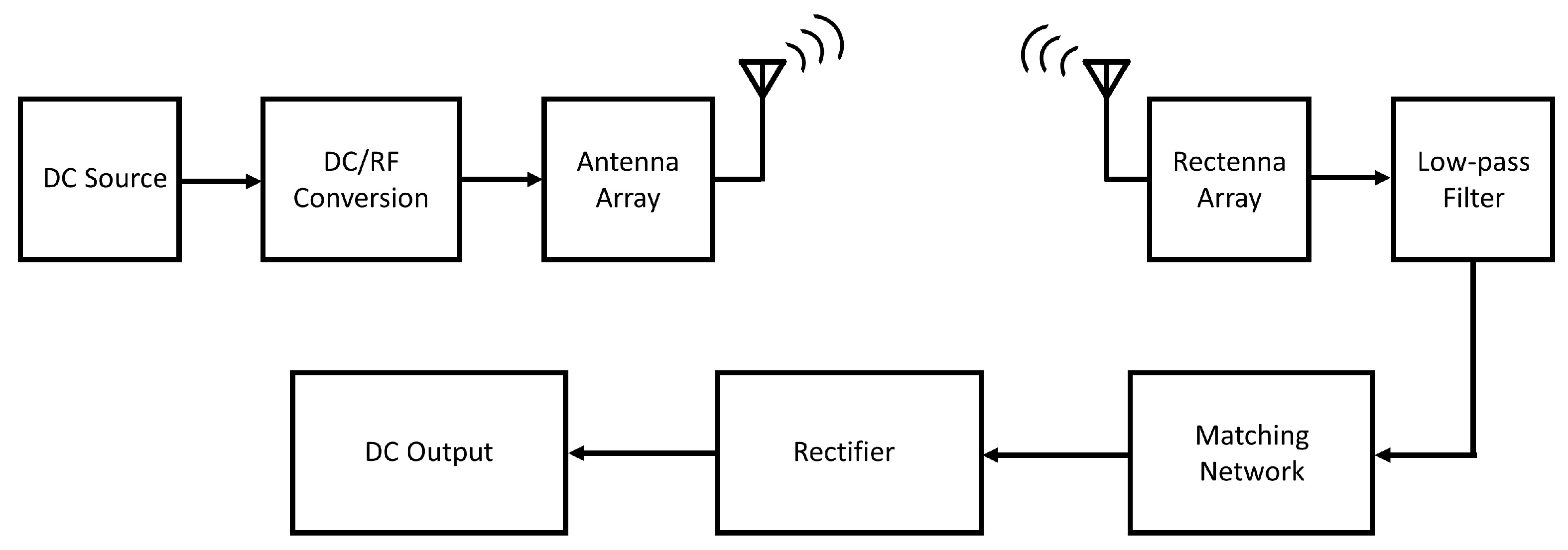{kind=link}
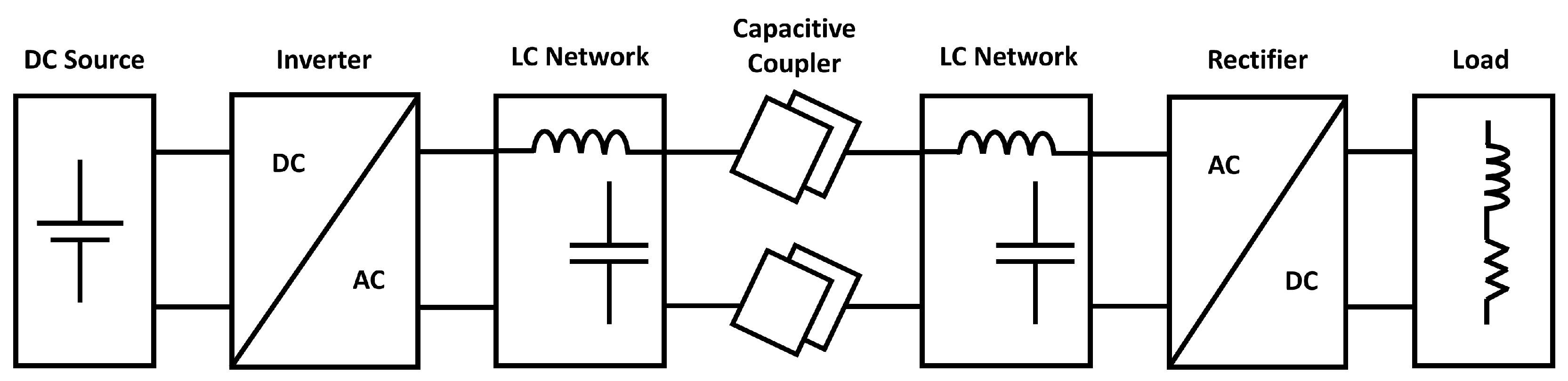{kind=link}
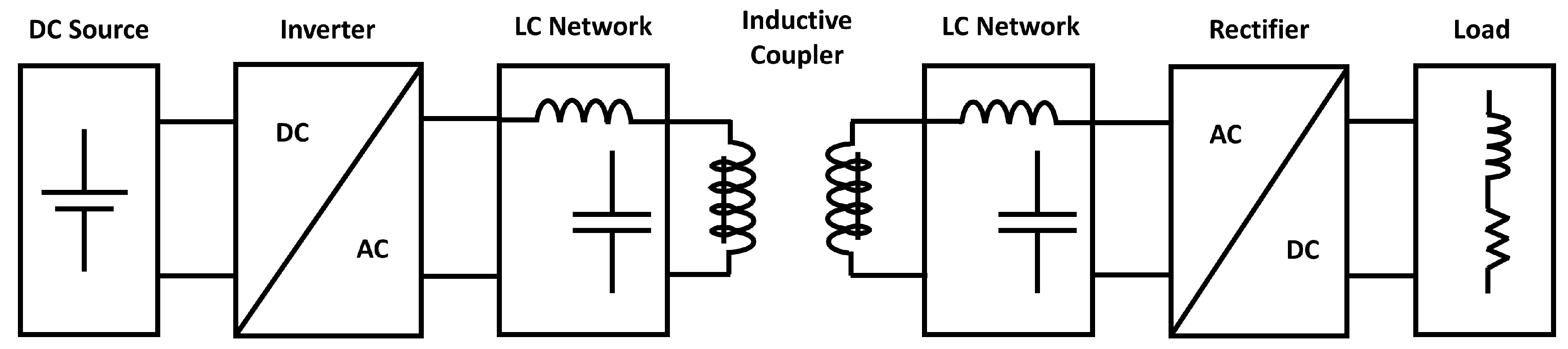{kind=link}
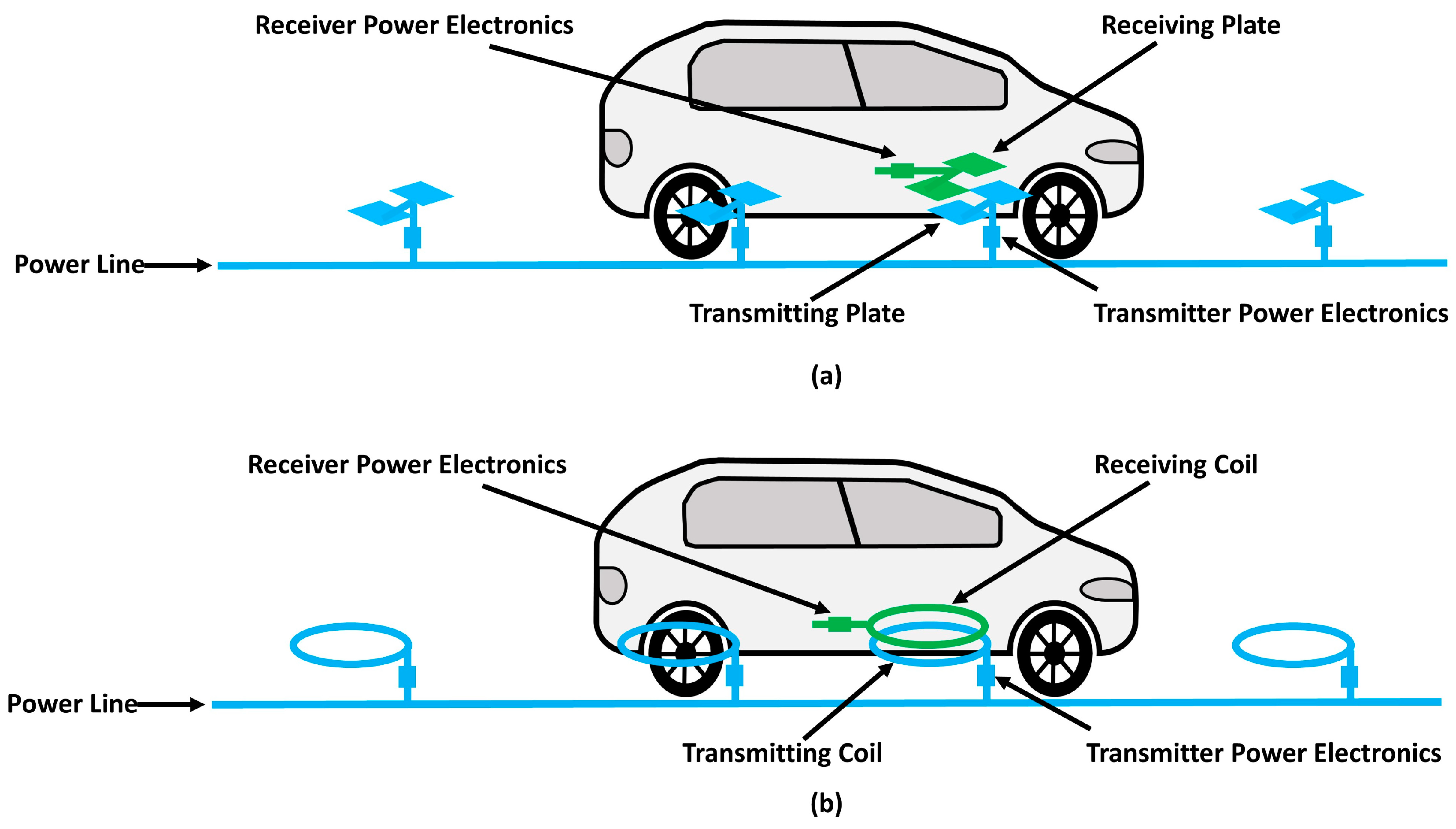{kind=link}
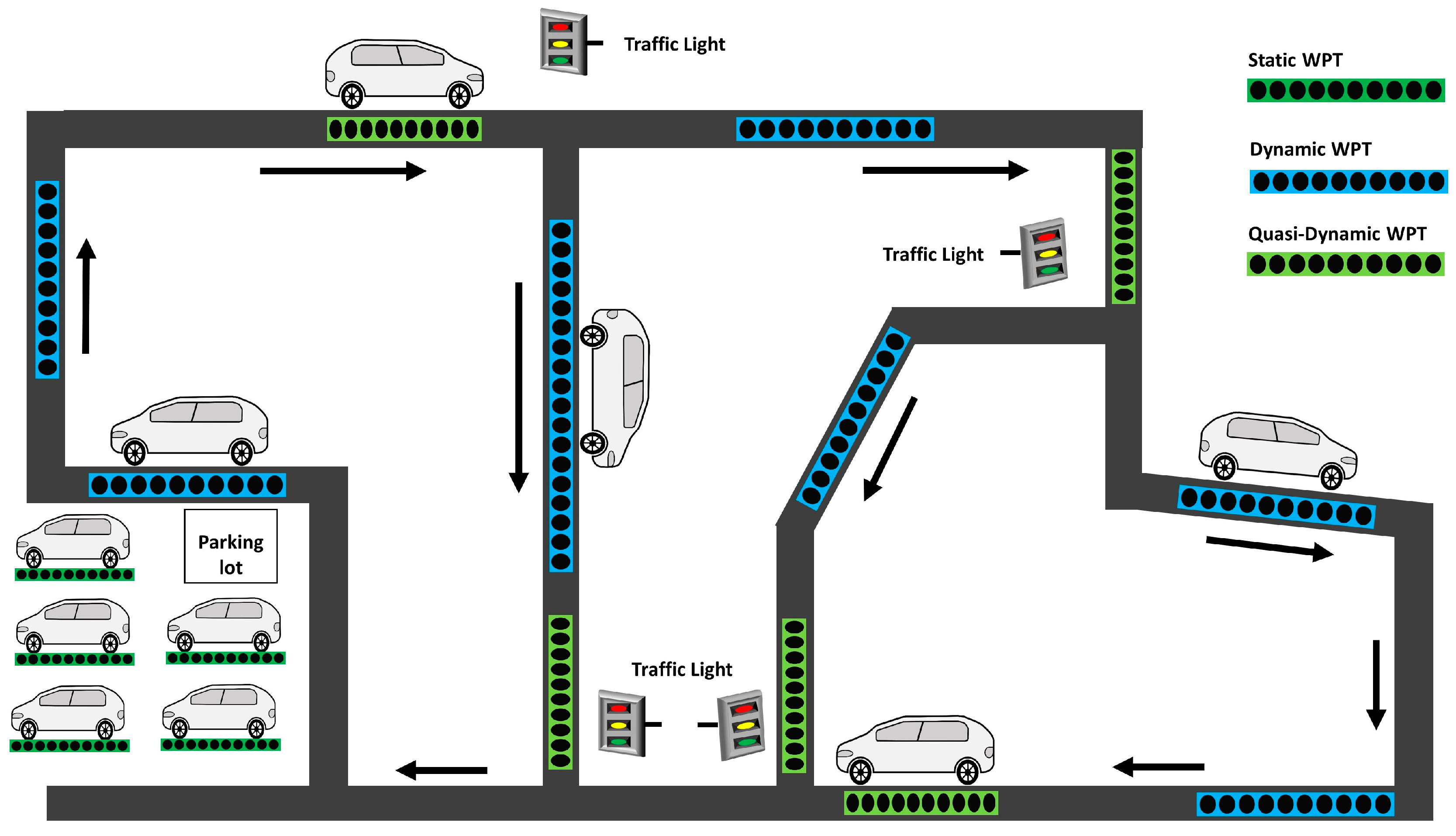{kind=link}
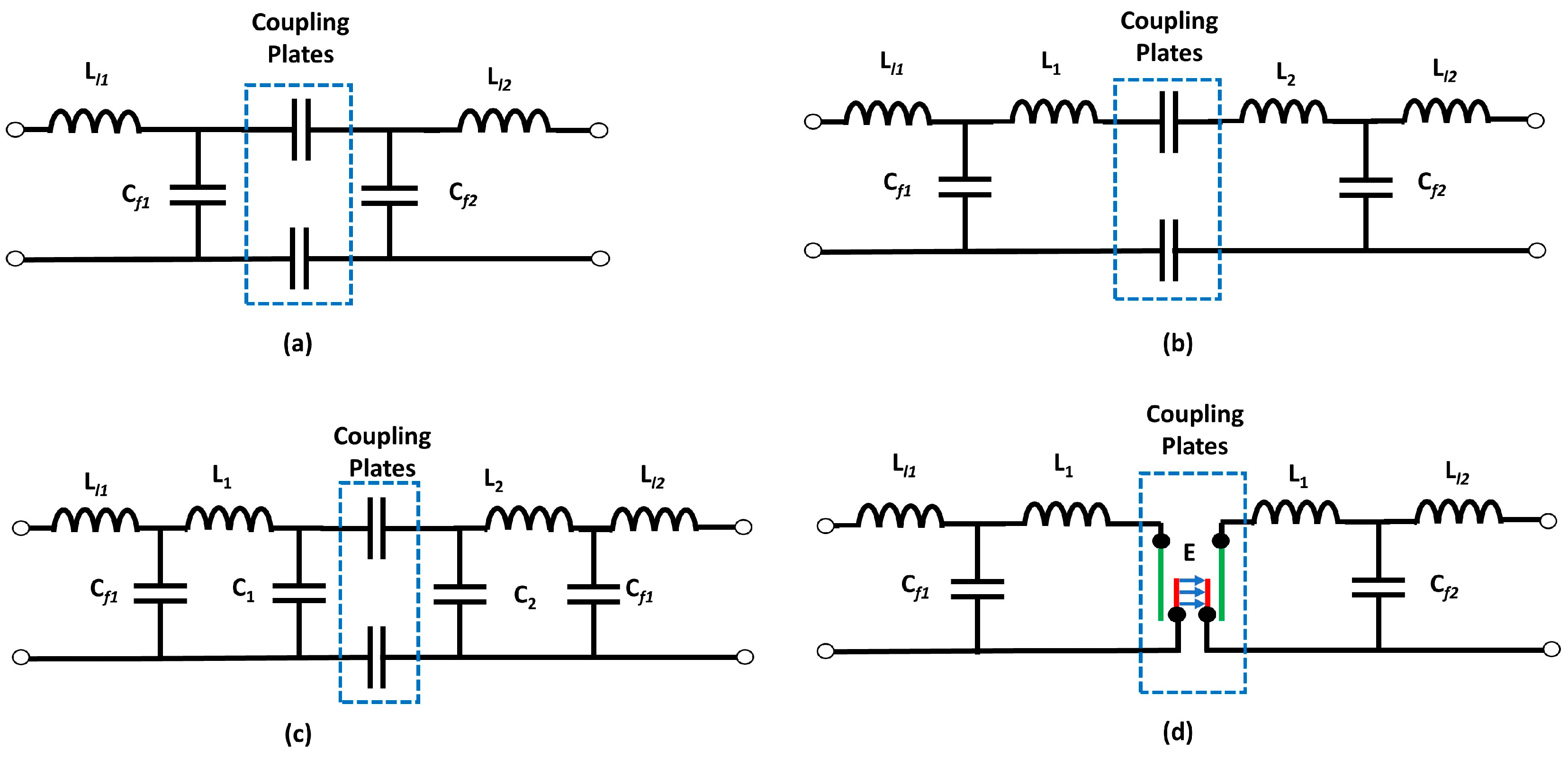{kind=link}
{kind=link}
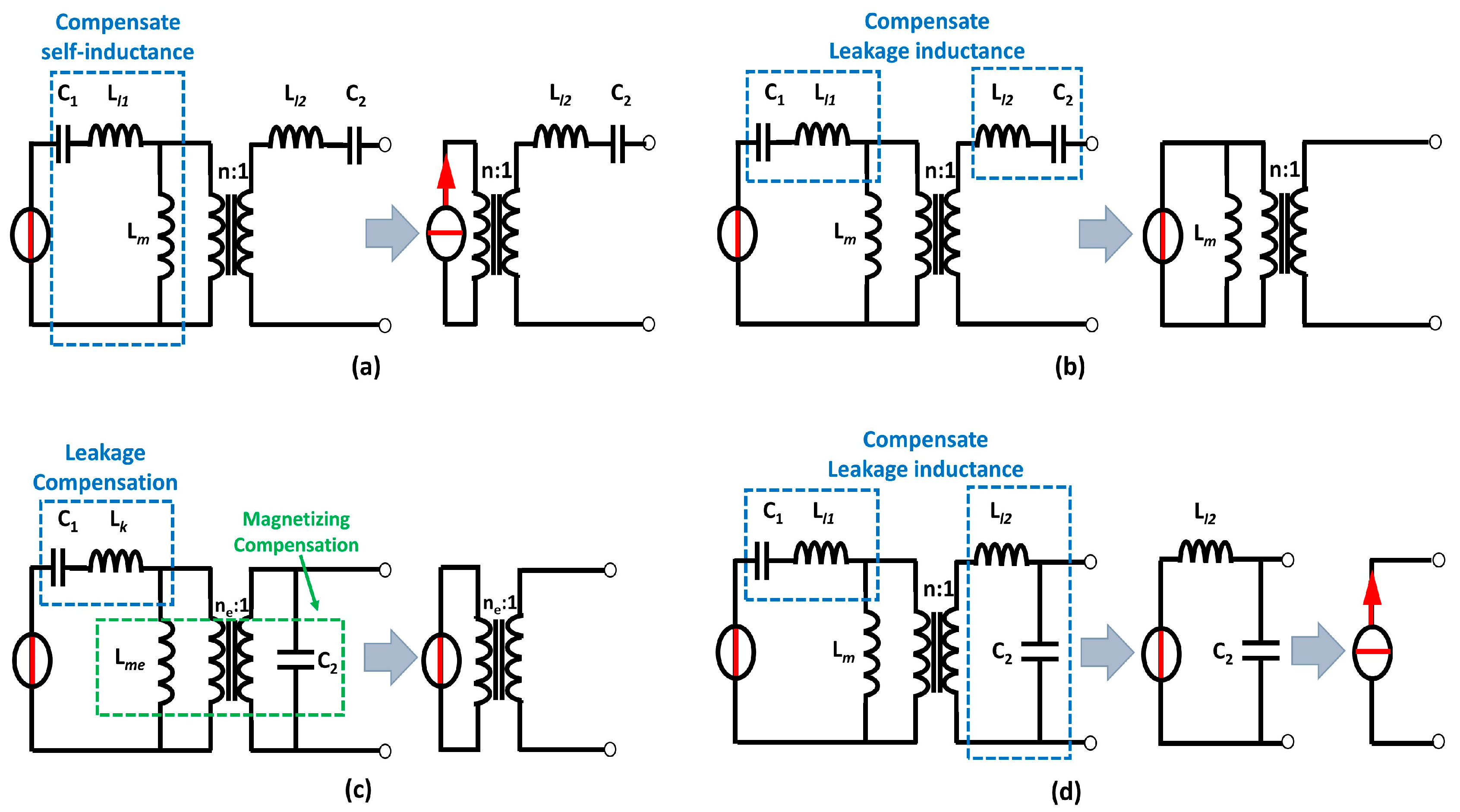{kind=link}
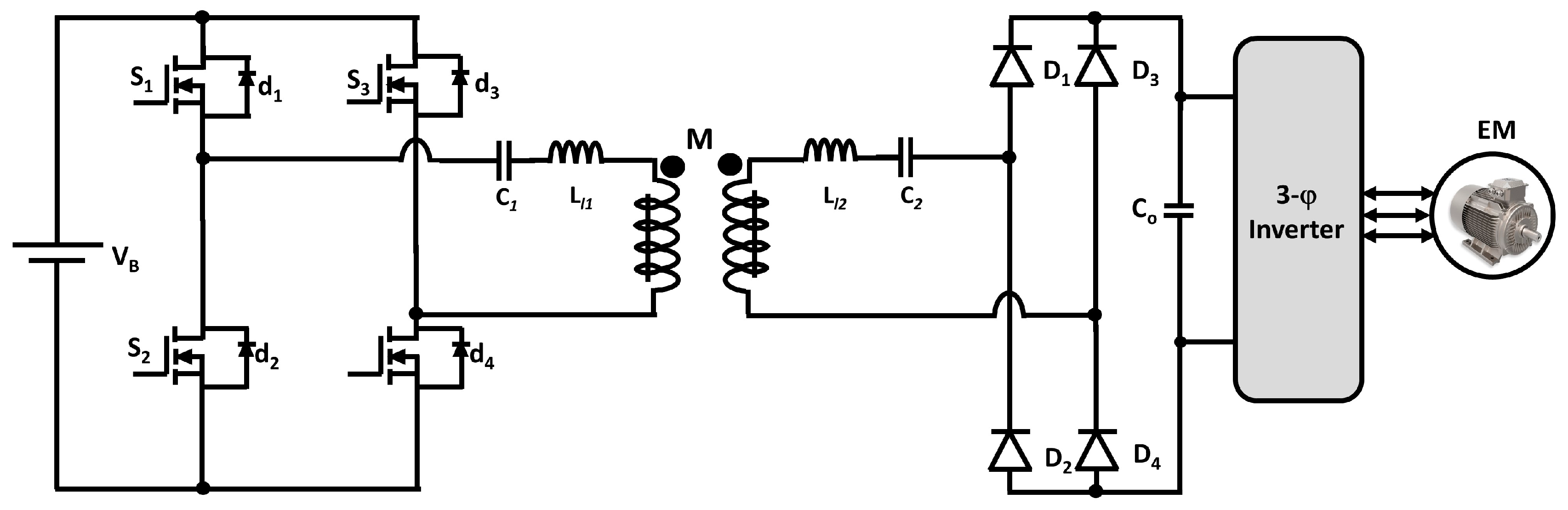{kind=link}
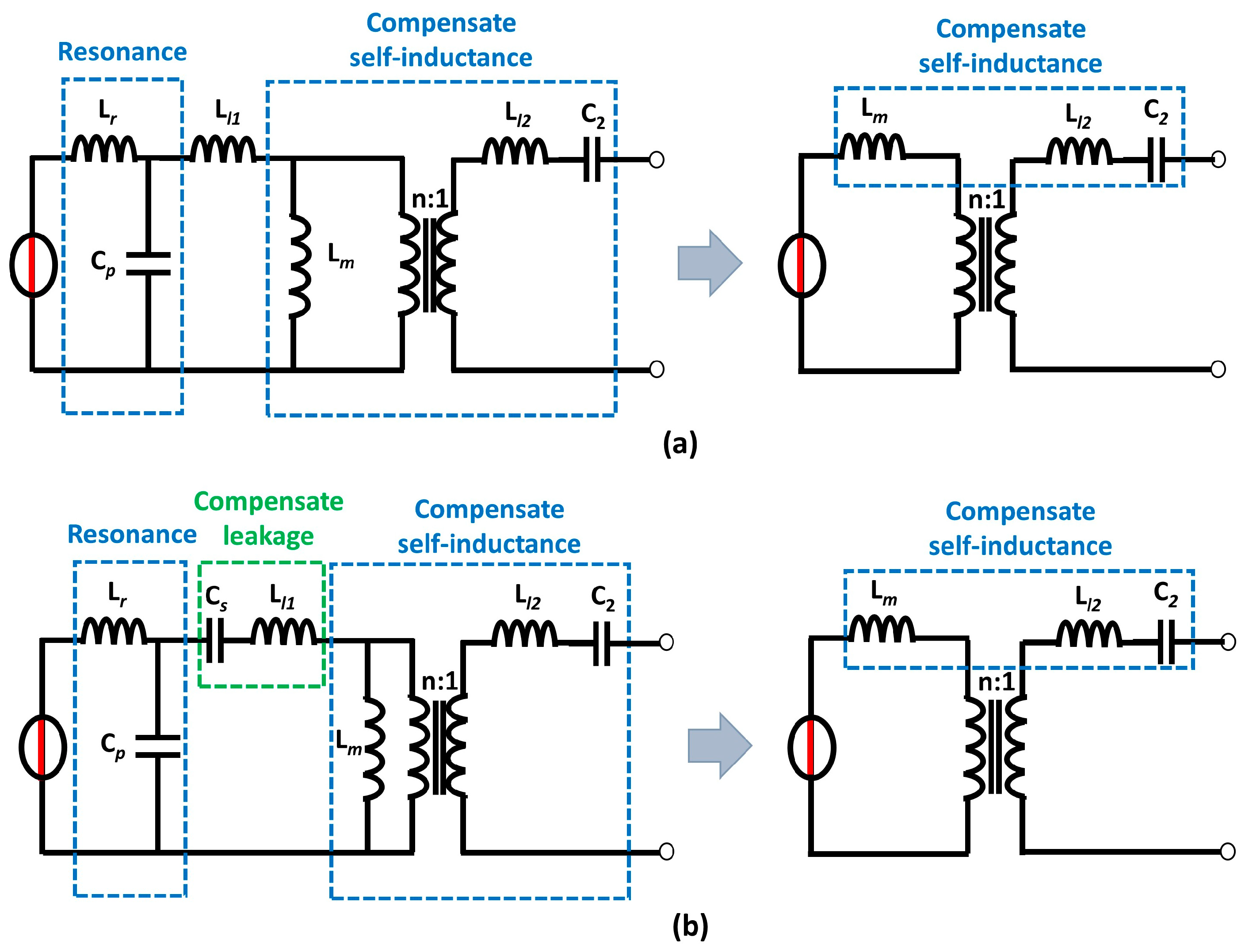{kind=link}
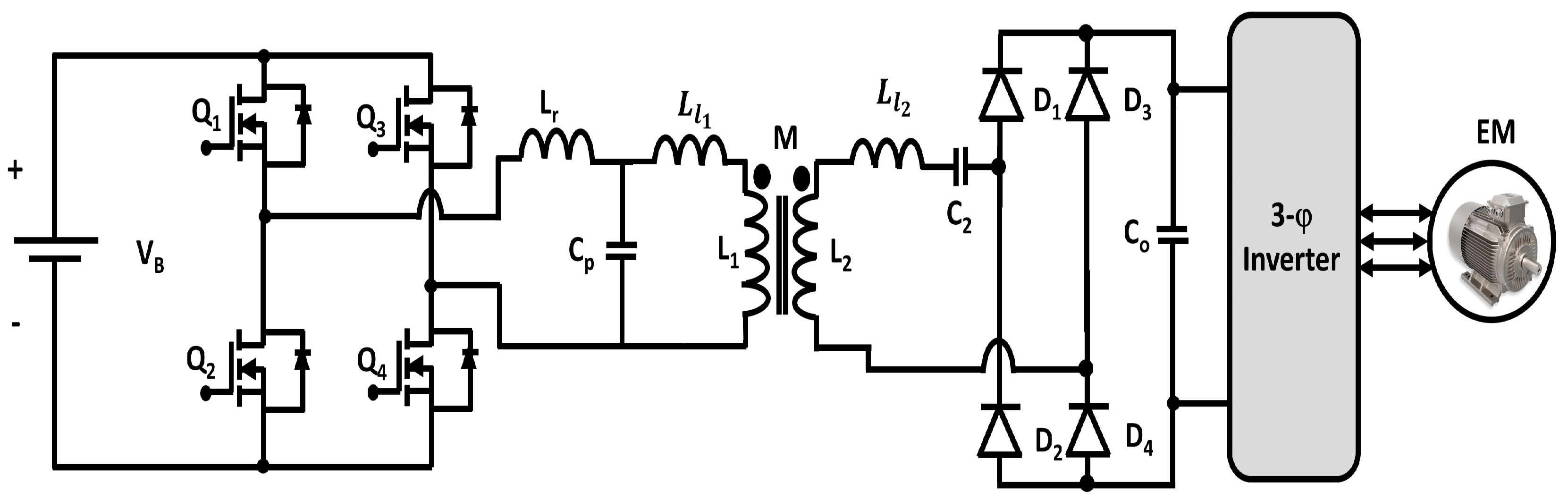{kind=link}
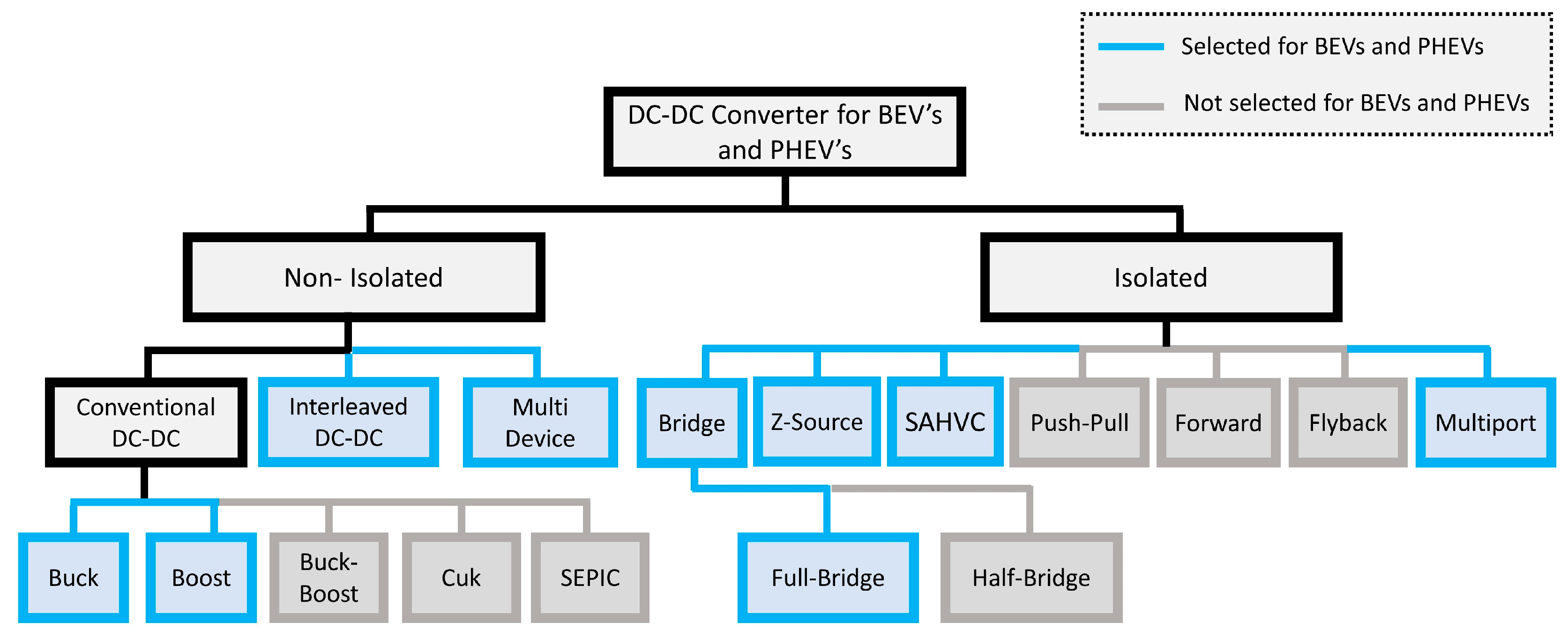{kind=link}
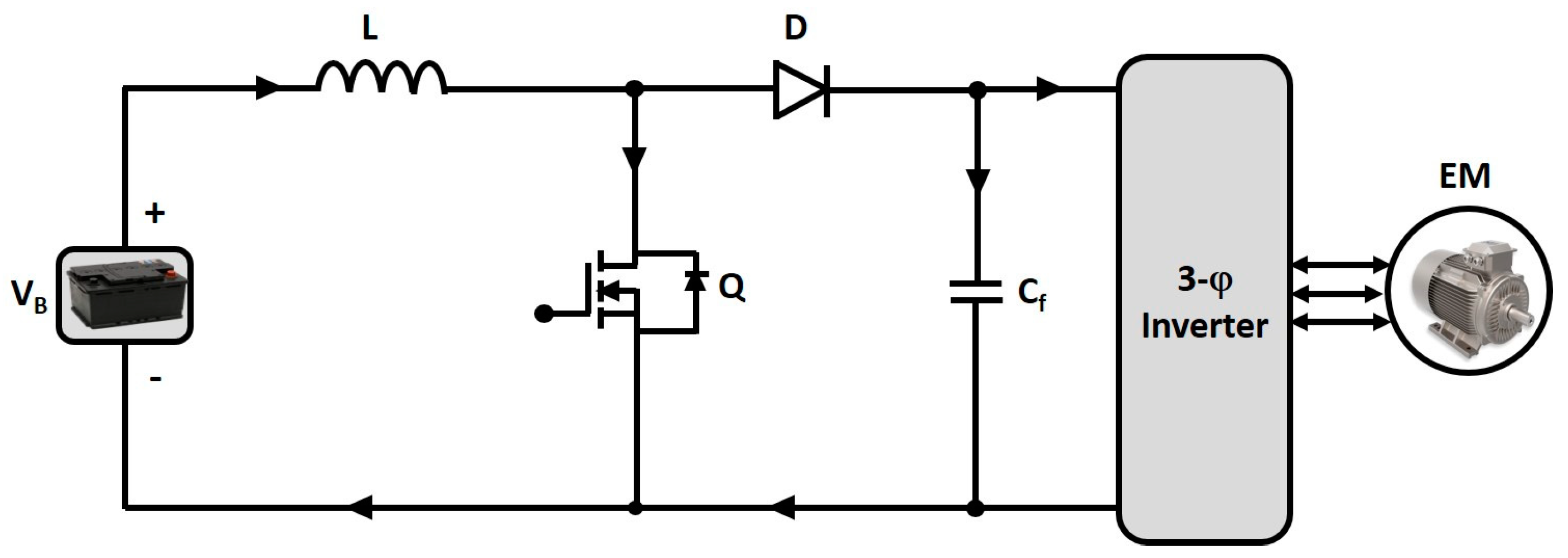{kind=link}
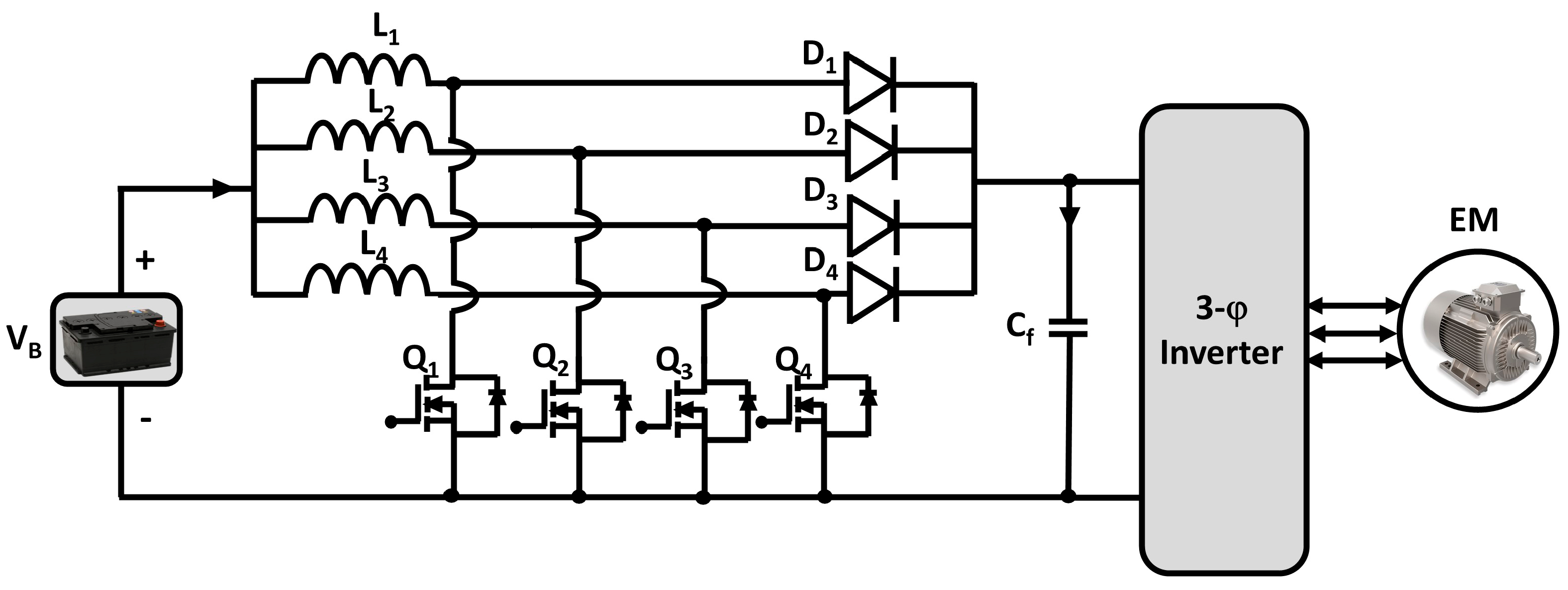{kind=link}
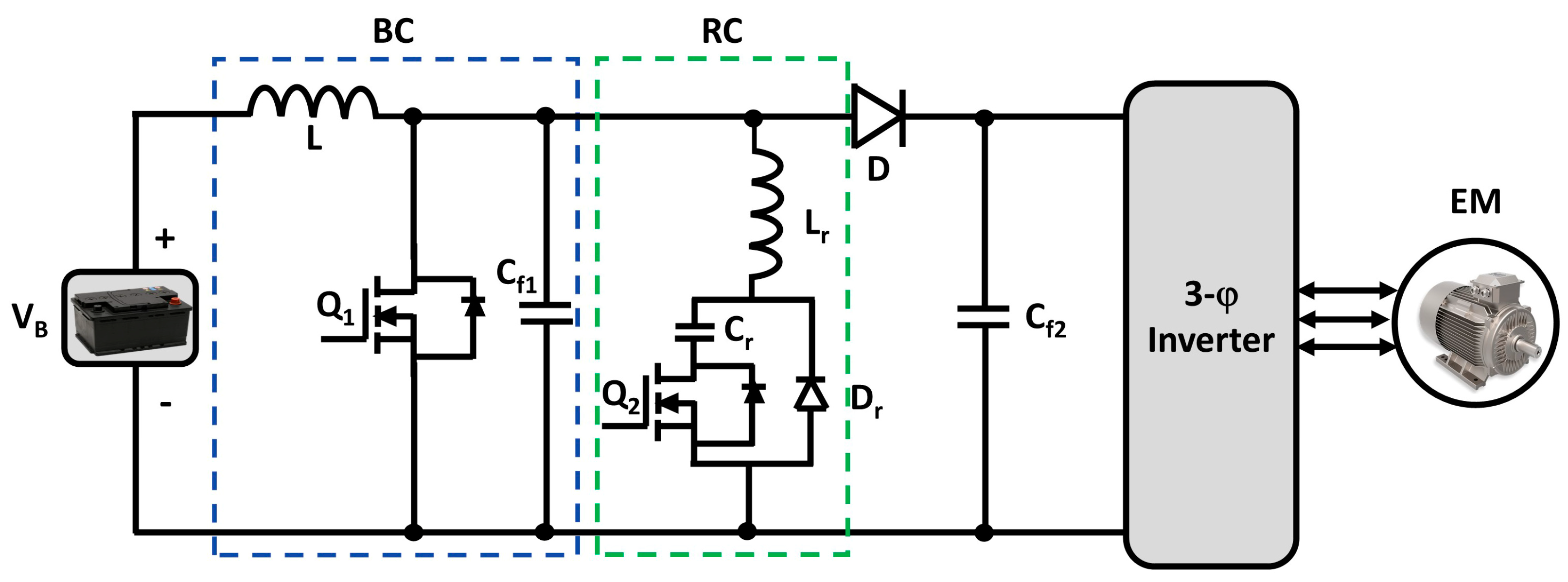{kind=link}
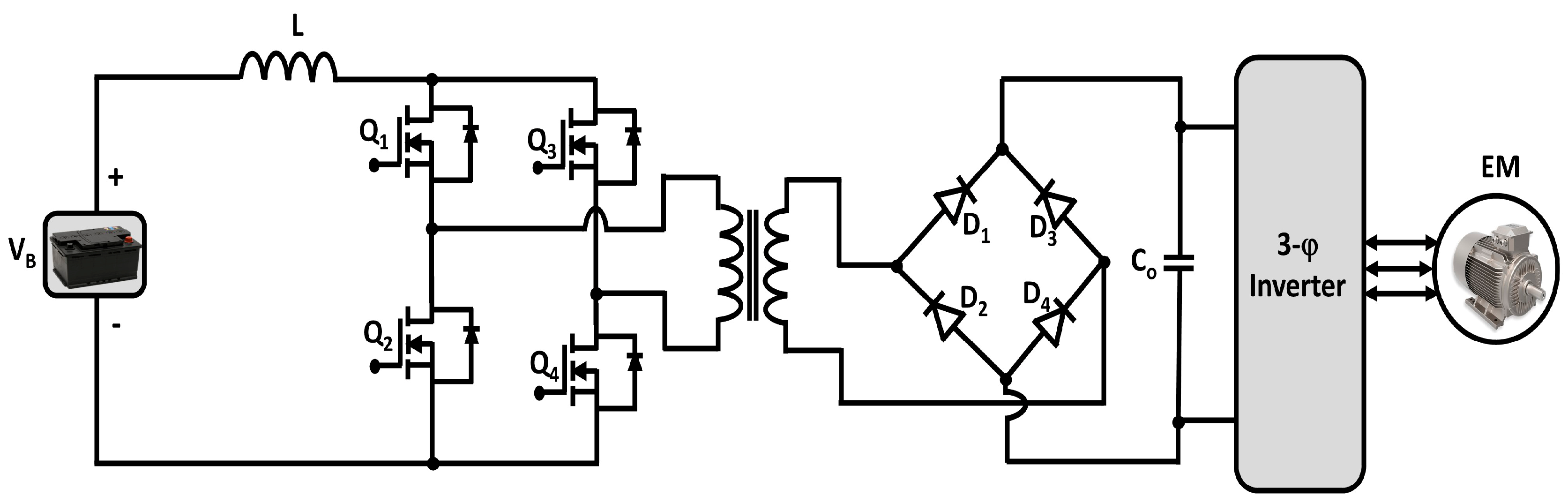{kind=link}
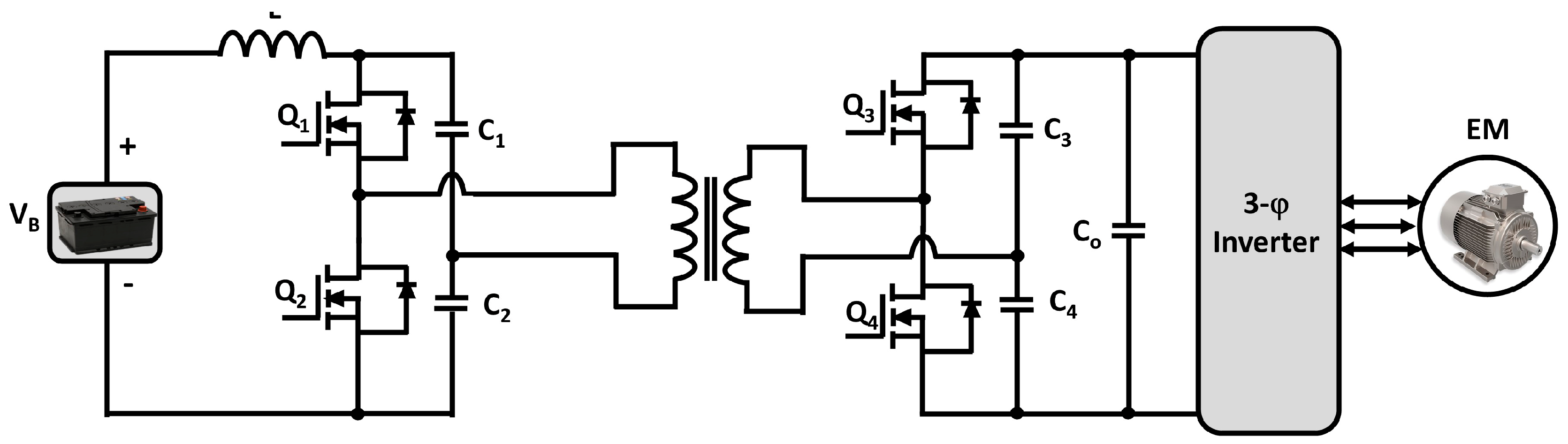{kind=link}
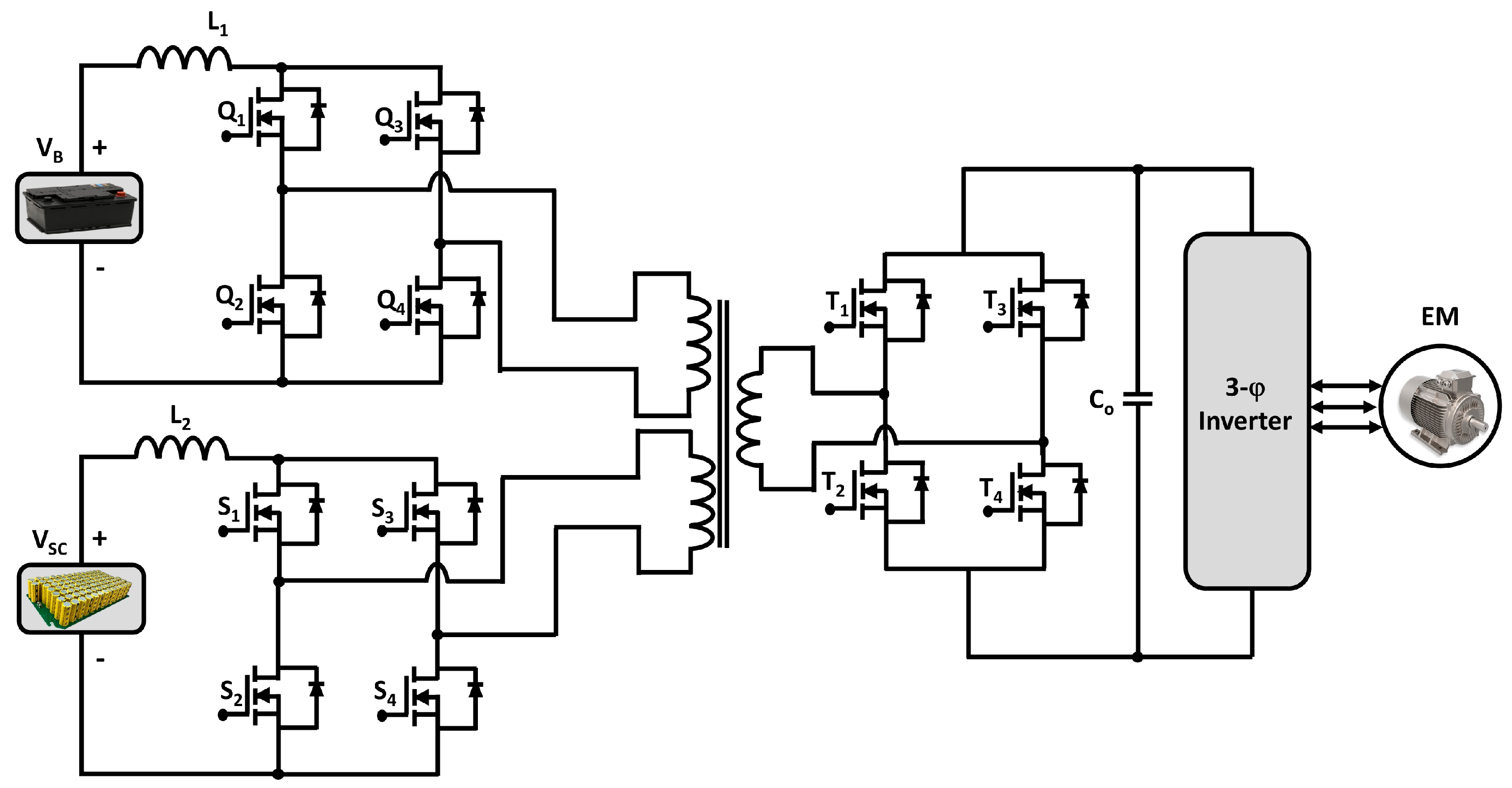{kind=link}
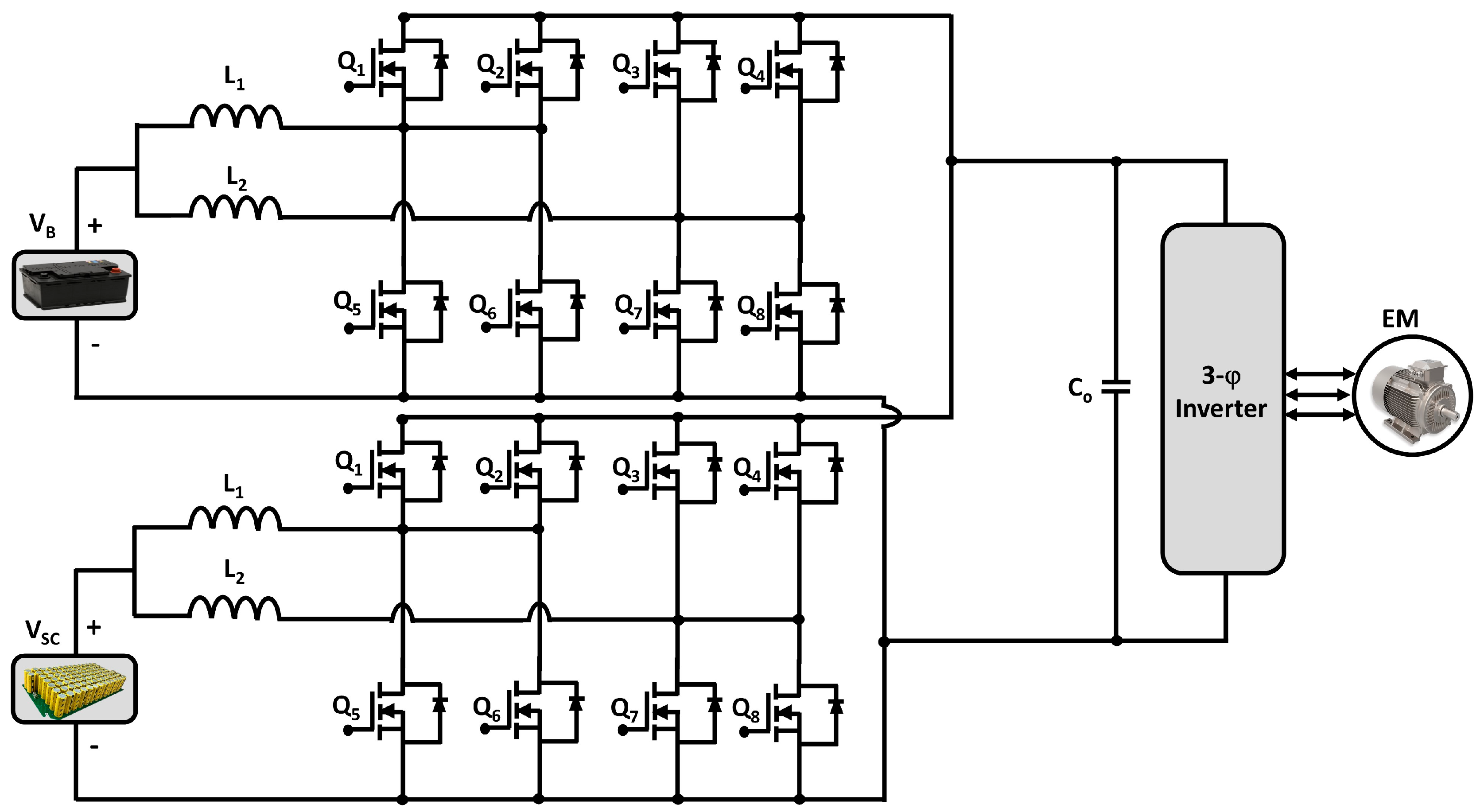{kind=link}
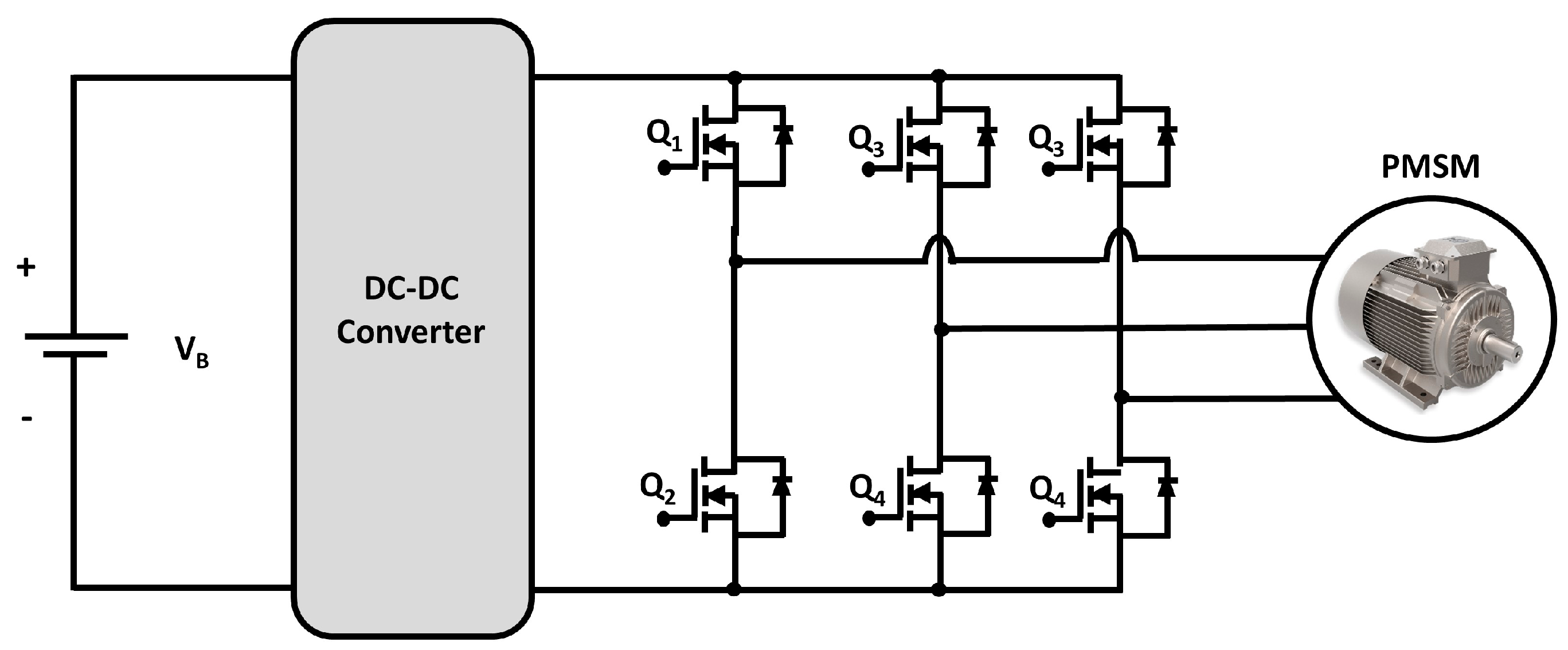{kind=link}
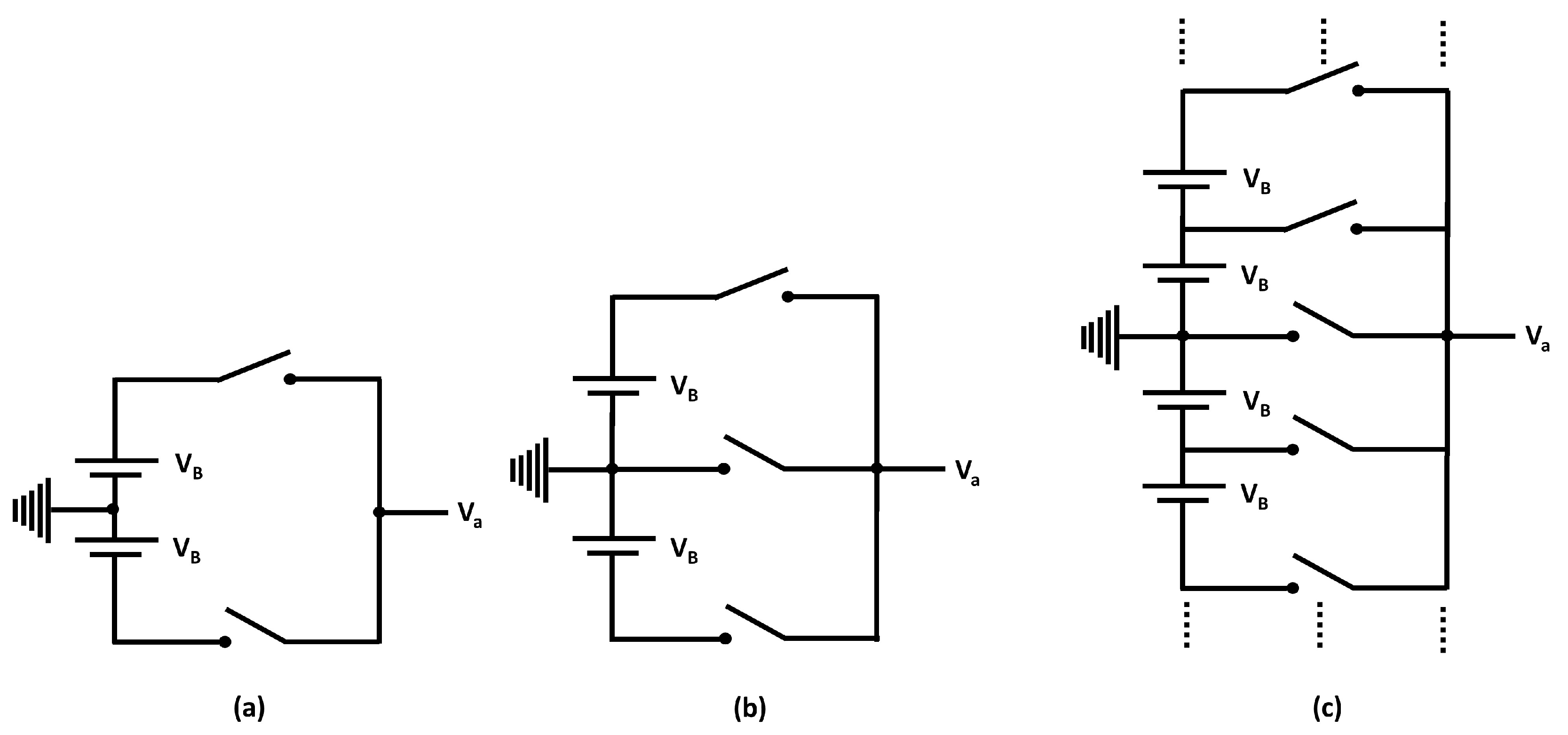{kind=link}
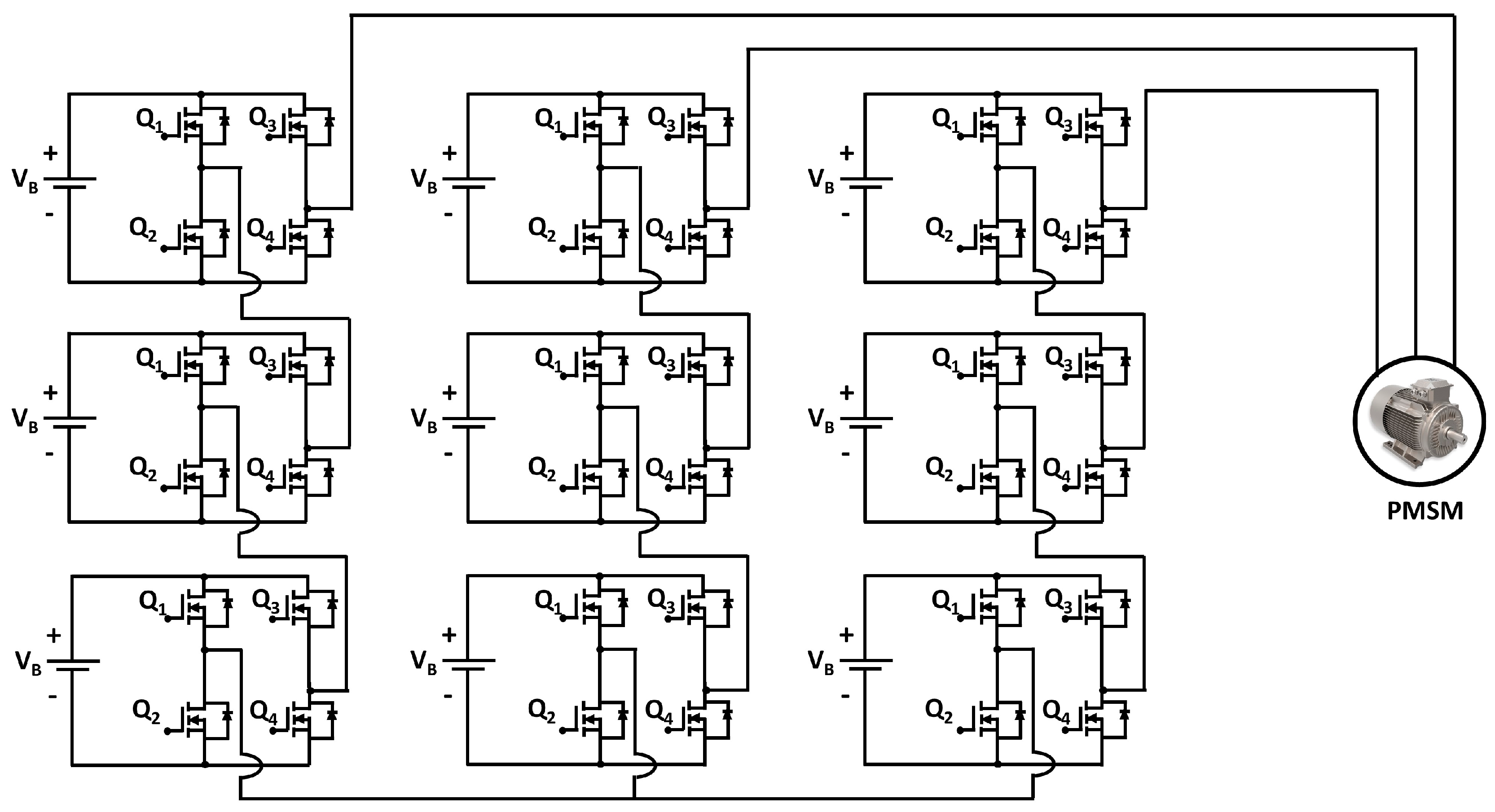{kind=link}
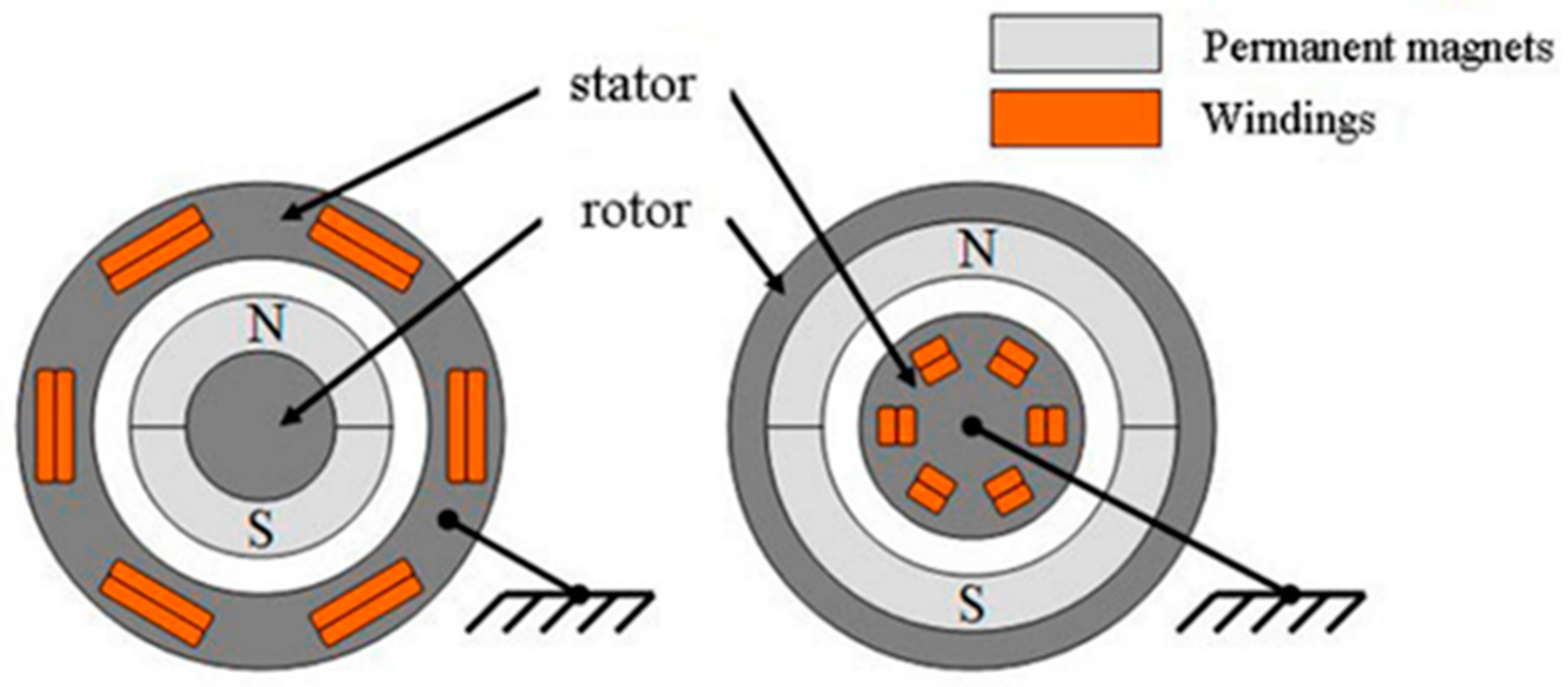{kind=link}
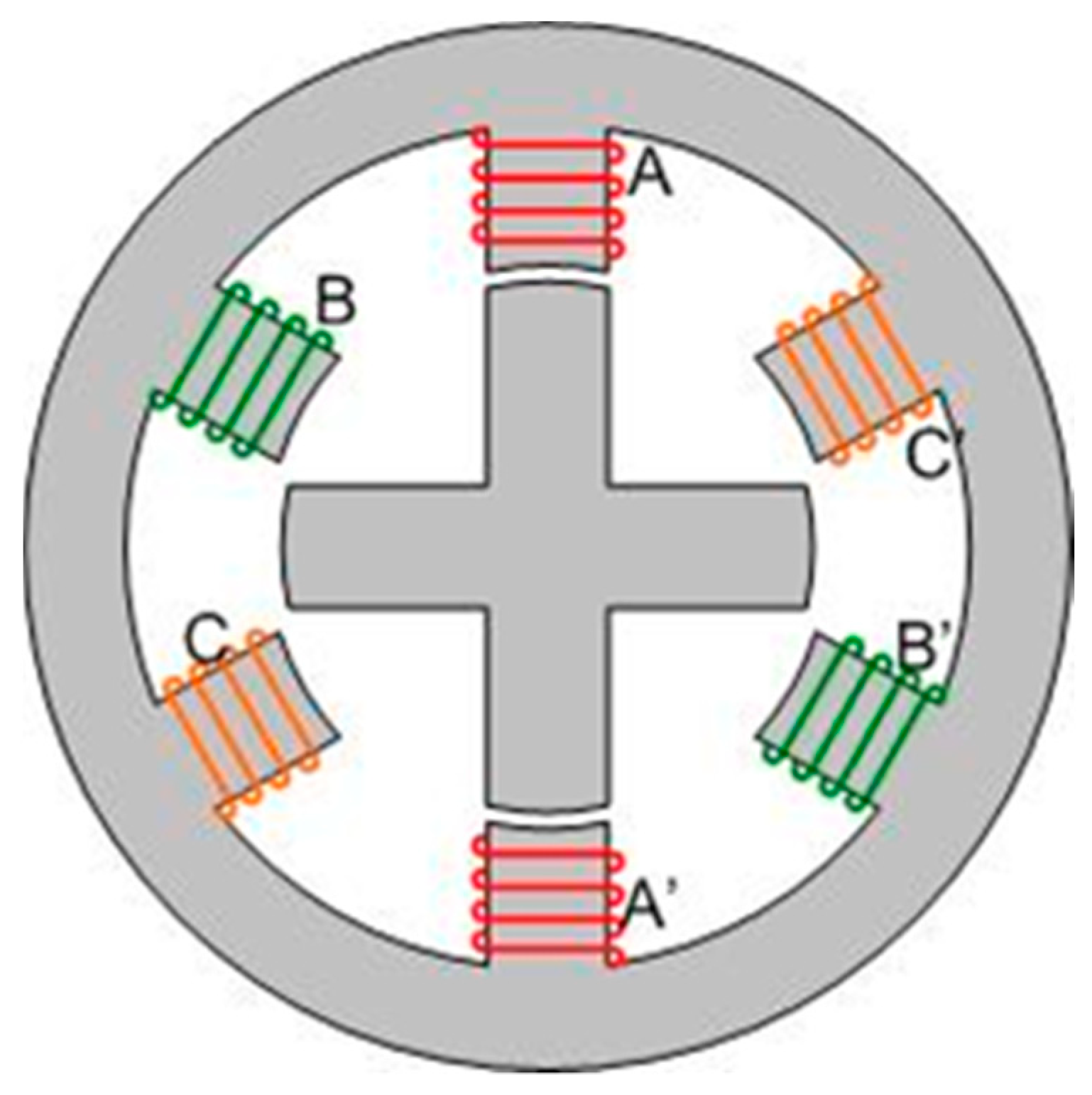{kind=link}
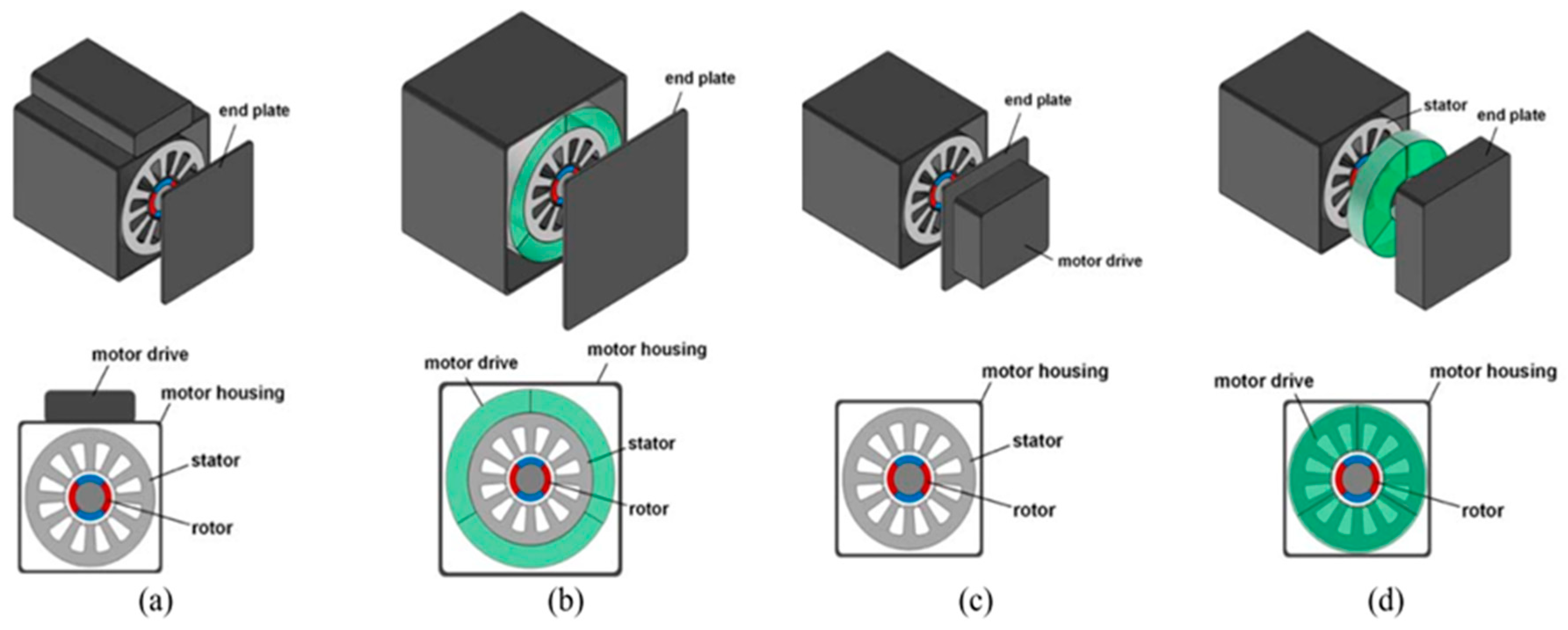{kind=link}
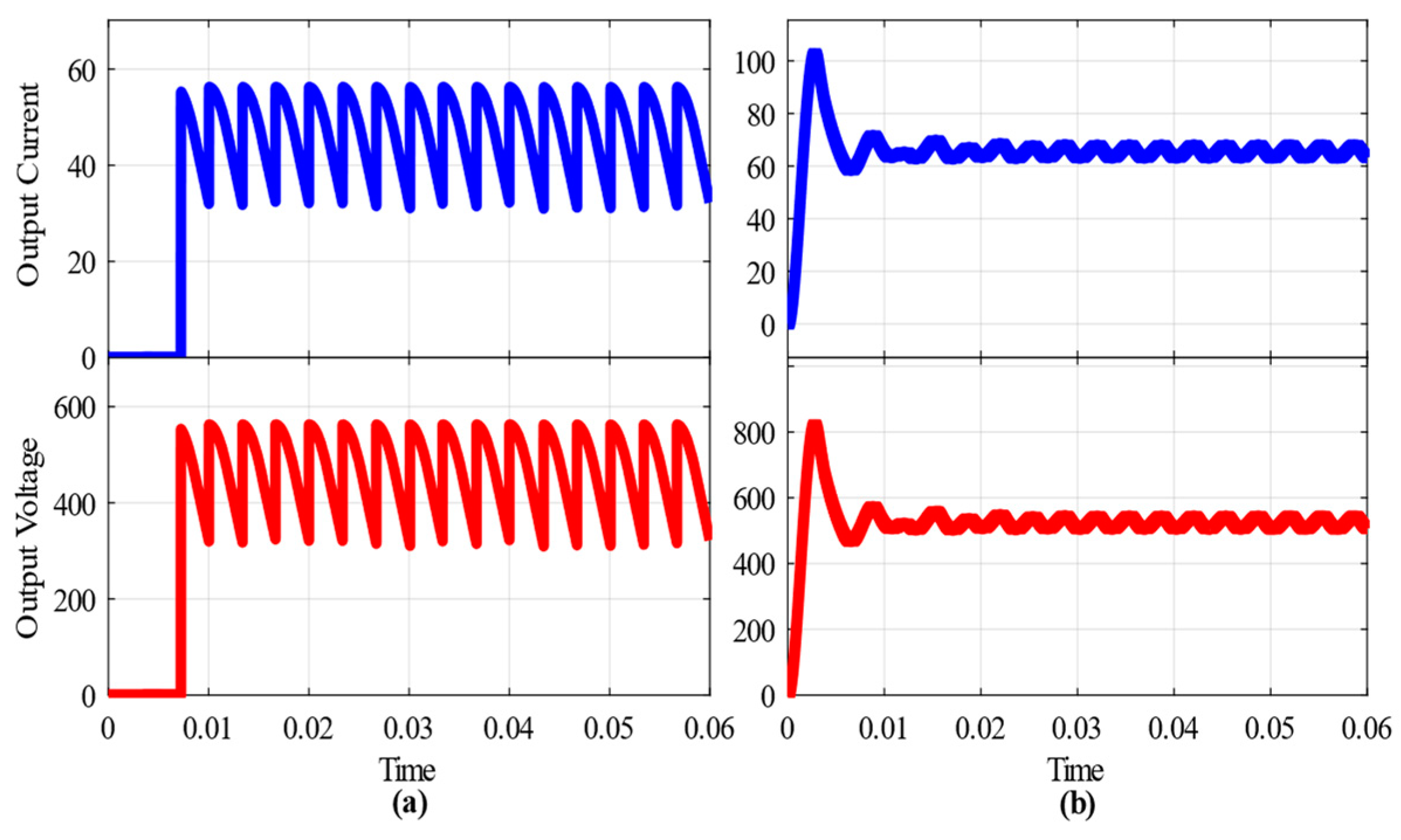{kind=link}
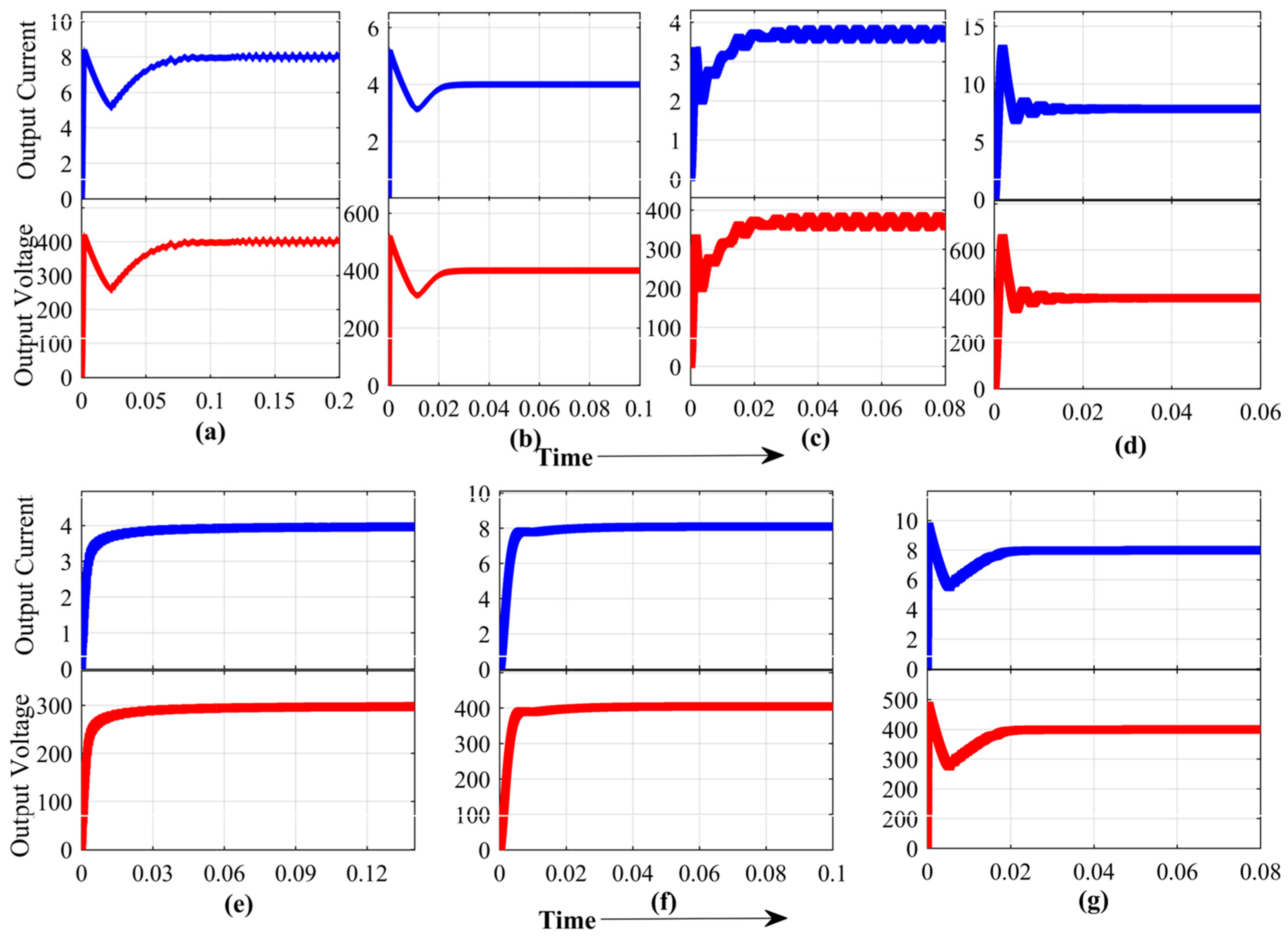{kind=link}
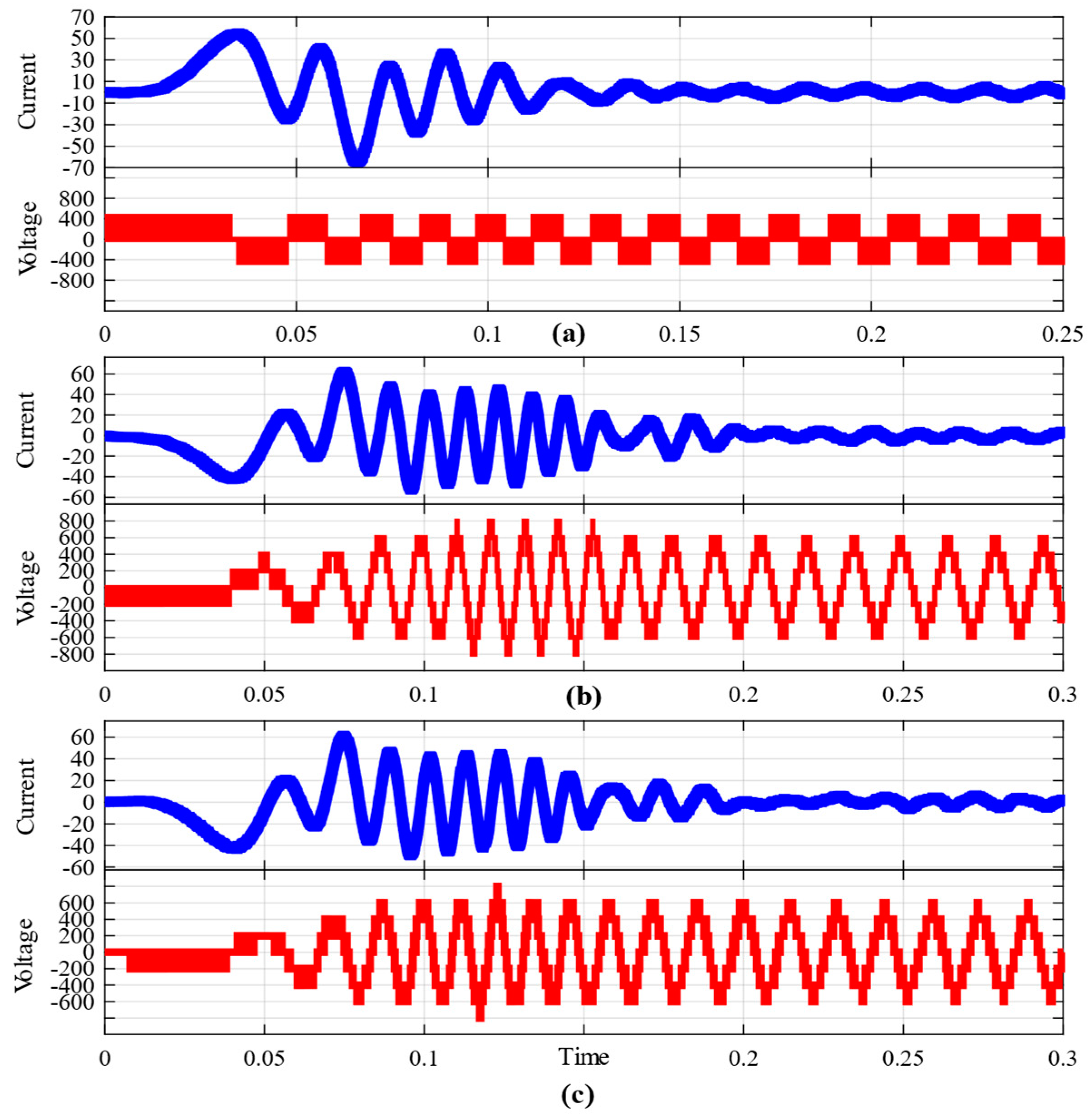{kind=link}
| EVs Power Electronic Converters Overview Contributions | Recently Overviewed Articles | Citation | Addressed in this Overview |
|---|---|---|---|
| Overview of charging rectifiers | [5,6] | 104;198 | √ |
| Overview of powertrain DC–DC converters | [6,35] | 198;1339 | √ |
| Overview of powertrain multilevel inverters | [1,12,36,37] | 73;164;269;39 | √ |
| Overview of electric motors for EV | [15,38,39] | 92;66;11 | √ |
| Overview of energy storage for EV | [40] | 677 | √ |
| Overview of wireless power charging | [7,16,41,42] | 518;97;551;30 | √ |
| Overview of the utilization of GaN and SiC | [32,33,34,43] | 14;25;1874;72 | √ |
| Vehicle | First Production Year | Battery Voltage (V) |
|---|---|---|
| Nissan Leaf | 2010 | 350 |
| Tesla Model S | 2012 | 350 |
| Chevrolet Spark EV | 2013 | 400 |
| Audi e-tron | 2018 | 400 |
| Porsche Taycan | 2019 | 800 |
| Lucid Air | 2020 | 900 |
| Aston Martin Rapide E | 2020 | 800 |
| Parameters | Bridgeless Boost Rectifier | Vienna Rectifier |
|---|---|---|
| RMS Input voltage, Vin (V) | 230 | 230 |
| Output voltage, Vout | 467 | 507 |
| Output power, Po (kW) | 22.41 | 32.10 |
| Frequency, f (Hz) | 50 | 50 |
| Phases, N | 3 | 3 |
| Inductor, L (µH) | - | 1000 |
| Capacitor, C (µF) | 461 | 1000 (×2) |
| Parameters | BC | IBC | BCRC | FBC | ZVSC | MPC | MDIBC |
|---|---|---|---|---|---|---|---|
| Input Voltage, Vin (V) | 200 | 200 | 150 | 200 | 100 | 288, 48 | 250, 200 |
| Output Voltage, Vout (V) | 300 | 400 | 380 | 400 | 300 | 400 | 400 |
| Switching Frequency, fsw (kHz) | 20 | 20 | 30 | 40 | 20 | 20 | 20 |
| Inductor Current, Imax (A) | 250 | 250 | 7.5 | 75 | - | - | 100 |
| Inductor current ripple, ΔImax (A) | 12.5 | 12.5 | 0.75 | 3.75 | - | - | 10 |
| Output Voltage Ripple, ΔVout (V) | 4 | 4 | 4 | 4 | 3 | - | 4 |
| Number of Phase, N | 1 | 4 | 1 | 1 | 1 | - | 4 |
| Turns ratio, n | - | - | - | 1:2 | 1:3 | 1:2 | - |
| Output Power, Po (kW) | 30 | 30 | 5 | 30 | 1.6 | 30 | 30 |
| Maximum Duty Cycle, D | 0.50 | 0.25 | 0.50 | 0.50 | 0.35 | - | 0.25 |
| Inductor, L (μH) | 400 | 100 | 6670 | 1200 | 0.56 | 175 | 187, 160 |
| Capacitor, C (μF) | 780 | 195 | 25 | 14.64 | 10 | 150 | 160 |
| Input Voltage, Vin (V) | 200 | 200 | 150 | 200 | 100 | 288, 48 | 250, 200 |
| Output Voltage, Vout (V) | 300 | 400 | 380 | 400 | 300 | 400 | 400 |
| Parameters | TLI | SLI | THI-SLI |
|---|---|---|---|
| Input voltage, Vin (V) | 450 | 200 | 200 |
| Output voltage (VP-P), Vout (V) | 450 | 400 | 400 |
| Output real power, Po (kW) | 4.6 | 4.8 | 5 |
| Frequency, f (Hz) | 25–50 | 13–50 | 13–50 |
| Phases, N | 3 | 3 | 3 |
| Output levels | 2 | 7 | 7 |
| Load, L | EM (5.4 HP) | EM (5.4 HP) | EM (5.4 HP) |
| Topologies | Controllability | Bidirectionality | Reliability | Power Range | Efficiency |
|---|---|---|---|---|---|
| PSFBC | High | Not Present | High | High | Moderate |
| FB-LLC | Moderate | Not Present | Low | Moderate | Low |
| Topologies | Merits | Demerits |
|---|---|---|
| PSFBC |
|
|
| FB-LLC |
|
|
| Topologies | Controllability | Bidirectionality | Reliability | Power Range | Efficiency |
|---|---|---|---|---|---|
| Bridgeless Boost Rectifier | Moderate | Present | Moderate | Moderate | High |
| Vienna Rectifier | High | Not Present | High | High | High |
| Topologies | Merits | Demerits |
|---|---|---|
| Bridgeless Boost Rectifier |
|
|
| Vienna Rectifier |
|
|
| Topologies | Controllability | Bidirectionality | Reliability | Power Range | Efficiency |
|---|---|---|---|---|---|
| BC | High | Not Present | Moderate | High | Low |
| IBC | High | Not Present | Moderate | High | Moderate |
| BCRC | High | Not Present | High | Low | Low |
| FBC | High | Not Present | High | High | Moderate |
| ZVSC | Moderate | Not Present | High | Low | High |
| MPC | Moderate | Present | Low | High | High |
| MDIBC | High | Present | High | High | High |
| Topologies | Merits | Demerits |
|---|---|---|
| BC |
|
|
| IBC |
|
|
| BCRC |
|
|
| FBC |
|
|
| ZVSC |
|
|
| MPC |
|
|
| MDIBC |
|
|
| Topologies | Controllability | Bidirectionality | Reliability | Power Range | Efficiency |
|---|---|---|---|---|---|
| TLI | Moderate | Present | Moderate | Low | Low |
| SLI | High | Present | Moderate | High | High |
| THI-SLI | High | Present | High | High | High |
| Topologies | Merits | Demerits |
|---|---|---|
| TLI |
|
|
| SLI |
|
|
| THI-SLI |
|
|
| Parameters | Si | SiC | GaN |
|---|---|---|---|
| Electron mobility (cm2/V×s) | 1400 | 900 | 1800 |
| Energy gap (eV) | 1.12 | 3.26 | 3.5 |
| Breakdown electric field (MV/cm) | 0.3 | 3 | 3.3 |
| Thermal conductivity (W/cm×K) | 1.5 | 4.9 | 1.3 |
| Saturation drift velocity (Mcm/s) | 10 | 27 | 27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, R.; Rafin, S.M.S.H.; Mohammed, O.A. Comprehensive Review of Power Electronic Converters in Electric Vehicle Applications. Forecasting 2023, 5, 22-80. https://doi.org/10.3390/forecast5010002
Islam R, Rafin SMSH, Mohammed OA. Comprehensive Review of Power Electronic Converters in Electric Vehicle Applications. Forecasting. 2023; 5(1):22-80. https://doi.org/10.3390/forecast5010002
Chicago/Turabian StyleIslam, Rejaul, S M Sajjad Hossain Rafin, and Osama A. Mohammed. 2023. "Comprehensive Review of Power Electronic Converters in Electric Vehicle Applications" Forecasting 5, no. 1: 22-80. https://doi.org/10.3390/forecast5010002
APA StyleIslam, R., Rafin, S. M. S. H., & Mohammed, O. A. (2023). Comprehensive Review of Power Electronic Converters in Electric Vehicle Applications. Forecasting, 5(1), 22-80. https://doi.org/10.3390/forecast5010002