
Resource Allocation of UAV-Assisted IoT Node Secure Communication System


Abstract
:1. Introduction
2. System Model and Problem Formulation
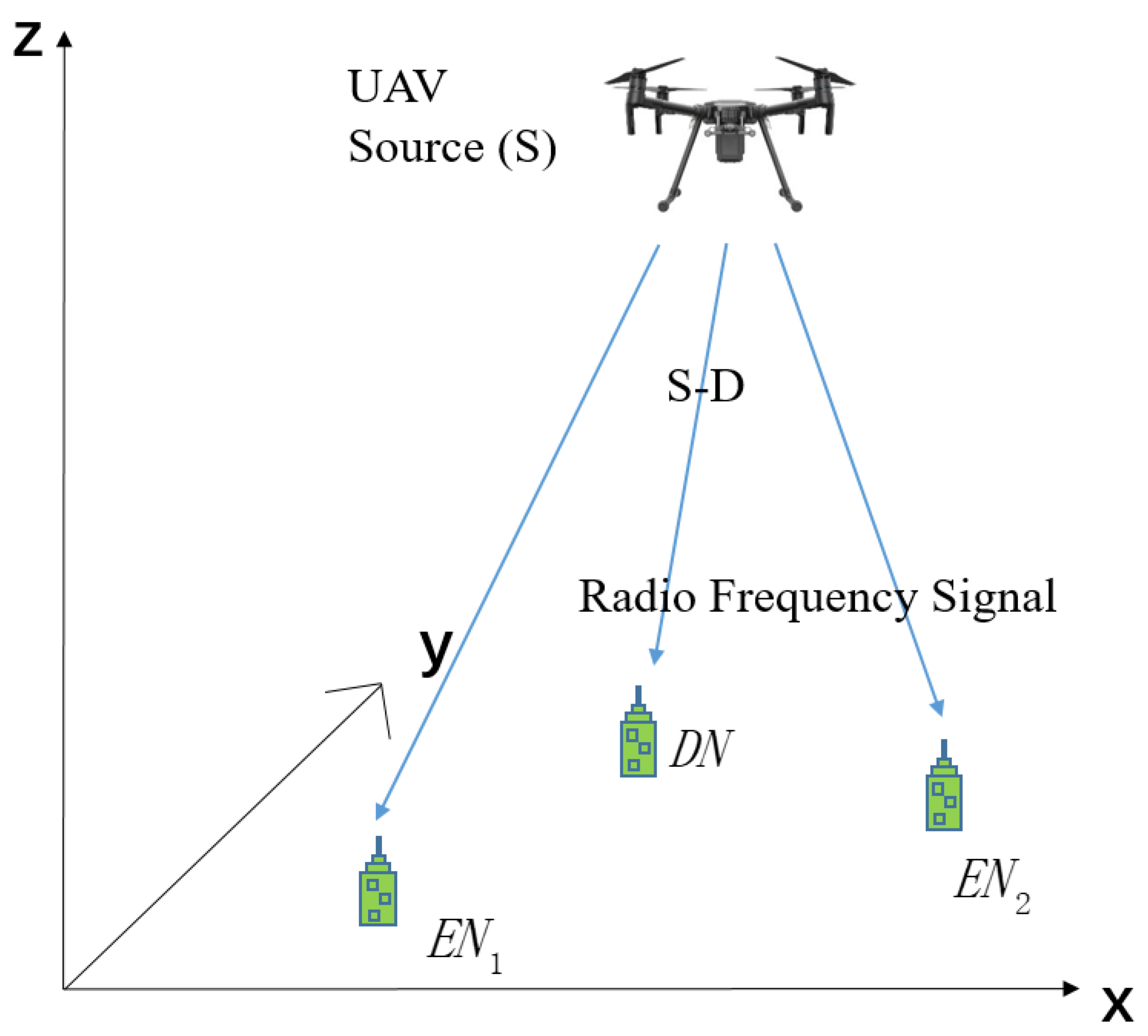
2.1. System Model
2.2. Problem Formulation
3. Proposed Optimization Algorithm
3.1. Optimal Transmit Power of UAV
3.2. Optimal UAV Trajectory
3.3. Optimal Power Splitting Ratio
3.4. Overall Algorithm
| Algorithm 1 Alternative optimization algorithm for P1.1 |
| 1. Setting: T, N, , and the tolerance error 2. Initialization: The iteration index , . 3. Repeat: 3.1. Calculate according to (12) with the given . Update , , , by the subgradient algorithm 3.2. Calculate according to (19) with the given . Update and by the subgradient algorithm 3.3. Solve P3 by CVX with given and if where Break; else Update the iterative number m = m + 1; End if Until 4. Obtain solutions: , and |
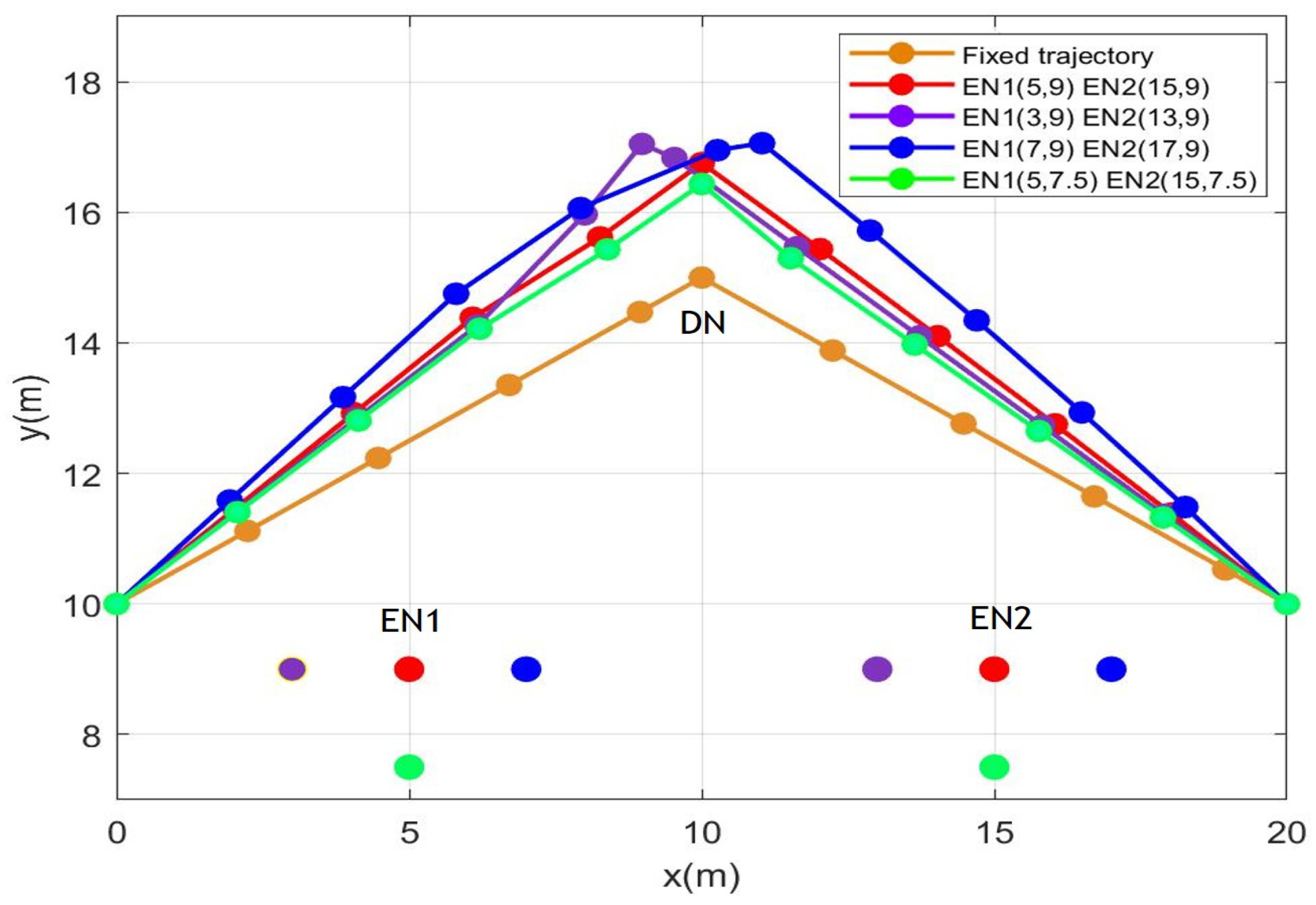
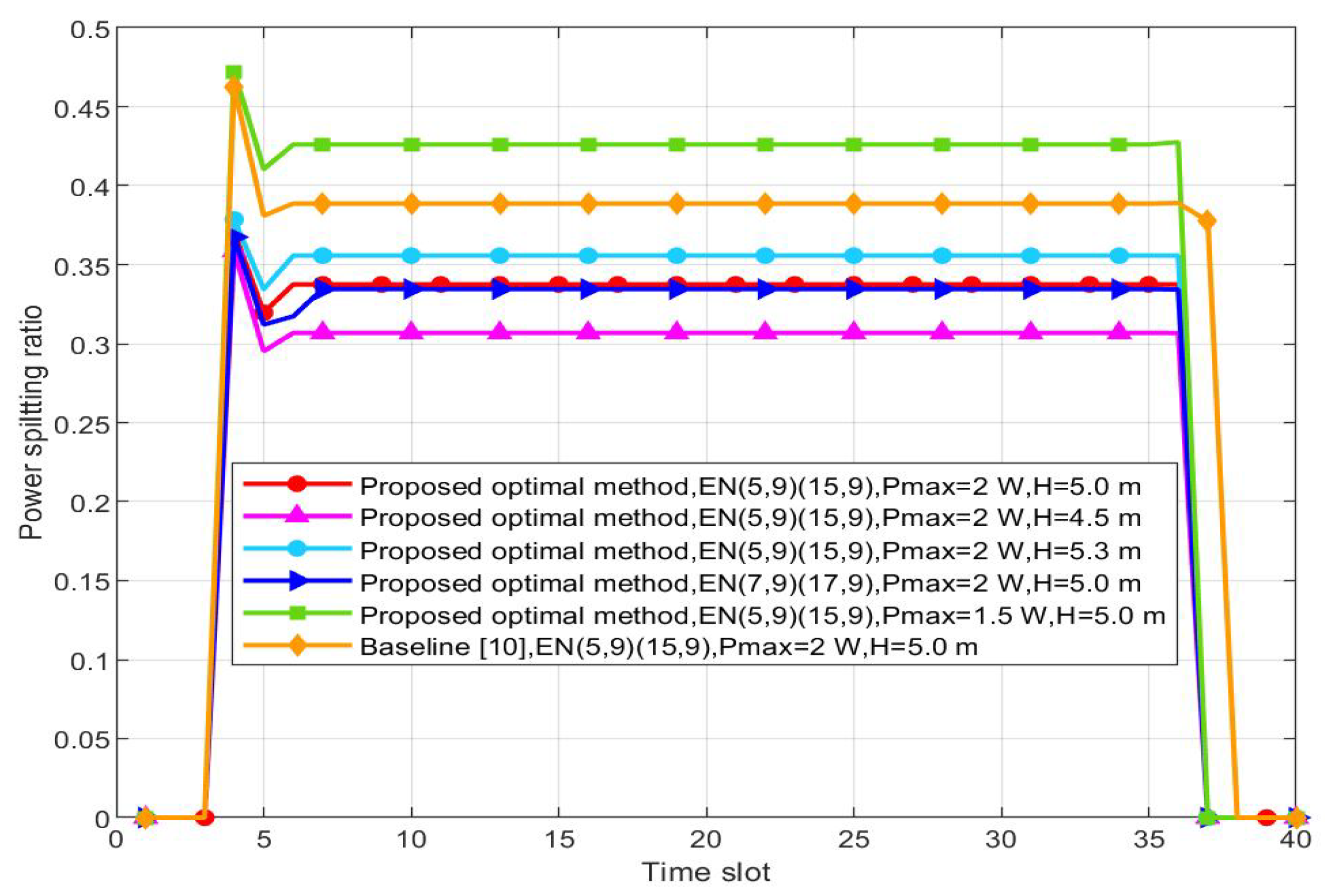
4. Simulation Results and Numerical Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, Y.; Liang, W.; Xu, W.; Xu, Z.; Jia, X.; Xu, Y.; Kan, H. Data collection maximization in IoT-sensor networks via an energy-constrained UAV. IEEE Trans. Mob. Comput. 2021, 22, 159–174. [Google Scholar] [CrossRef]
- Jiang, R.; Xiong, K.; Yang, H.C.; Fan, P.; Zhong, Z.; Letaief, K.B. On the coverage of UAV-assisted SWIPT networks with nonlinear EH model. IEEE Trans. Wirel. Commun. 2021, 21, 4464–4481. [Google Scholar] [CrossRef]
- Kim, K.W.; Lee, H.S.; Lee, J.W. Waveform design for fair wireless power transfer with multiple energy harvesting devices. IEEE J. Sel. Areas Commun. 2018, 37, 34–47. [Google Scholar] [CrossRef]
- Sun, X.; Ng, D.W.K.; Ding, Z.; Xu, Y.; Zhong, Z. Physical layer security in UAV systems: Challenges and opportunities. IEEE Wirel. Commun. 2019, 26, 40–47. [Google Scholar] [CrossRef]
- Yin, S.; Zhao, Y.; Li, L.; Yu, F.R. UAV-assisted cooperative communications with power-splitting information and power transfer. IEEE Trans. Green Commun. Netw. 2019, 3, 1044–1057. [Google Scholar] [CrossRef]
- Mukherjee, A.; Fakoorian, S.A.A.; Huang, J.; Swindlehurst, A.L. Principles of physical layer security in multiuser wireless networks: A survey. IEEE Commun. Surv. Tutor. 2014, 16, 1550–1573. [Google Scholar] [CrossRef]
- Wyner, A.D. The wire-tap channel. Bell Syst. Tech. J. 1975, 54, 1355–1387. [Google Scholar] [CrossRef]
- Garcia-Magarino, I.; Lacuest, R.; Rajarajan, M.; Lloret, J. Security in networks of unmanned aerial vehicles for surveillance with an agent-based approach inspired by the principles of blockchain. Ad Hoc Netw. 2019, 86, 72–82. [Google Scholar] [CrossRef]
- Mamaghani, M.T.; Hong, Y. Improving PHY-security of UAV-enabled transmission with wireless energy harvesting: Robust trajectory design and communications resource allocation. IEEE Trans. Veh. Technol. 2020, 69, 8586–8600. [Google Scholar] [CrossRef]
- Hong, X.; Liu, P.; Zhou, F.; Guo, S.; Chu, Z. Resource allocation for secure UAV-assisted SWIPT systems. IEEE Access 2019, 7, 24248–24257. [Google Scholar] [CrossRef]
- Hua, M.; Wang, Y.; Zhang, Z.; Li, C.; Huang, Y.; Yang, L. Energy-efficient optimisation for UAV-aided wireless sensor networks. IET Commun. 2019, 13, 972–980. [Google Scholar] [CrossRef]
- Shengnan, C.; Xiangdong, J.; Yixuan, G.; Yuhua, Z. Physical layer security communication of cognitive UAV mobile relay network. In Proceedings of the 2021 7th International Symposium on Mechatronics and Industrial Informatics (ISMII), Zhuhai, China, 22–24 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 267–271. [Google Scholar]
- Tegos, S.A.; Diamantoulakis, P.D.; Pappi, K.; Karagiannidis, G.K. Optimal simultaneous wireless information and power transfer with low-complexity receivers. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Choi, K.W.; Hwang, S.I.; Aziz, A.A.; Jang, H.H.; Kim, J.S.; Kang, D.S.; Kim, D.I. Simultaneous wireless information and power transfer (SWIPT) for Internet of Things: Novel receiver design and experimental validation. IEEE Internet Things J. 2020, 7, 2996–3012. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV communications via joint trajectory and power control. IEEE Trans. Wirel. Commun. 2019, 18, 1376–1389. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values [10] |
|---|---|
| Mission time T | 20 s |
| Time slots N | 40 |
| Maximum transmit power | 2 W |
| Average transmission power | W |
| Noise power | −50 dBm |
| Channel power gain | −30 dBm |
| Power conversion efficiency factor | |
| Collecting energy threshold | 70 W |
| Information coding threshold | 50 W |
| Maximum speed of UAV | 5 m/s |
| Indices | Baseline [10] | Proposed Optimal Method |
|---|---|---|
| Maximum transmit power W | 0.5984 | 0.6207 |
| Stable harvesting energy of (W) | 1.176 × | 7.322 × |
| Stable harvesting energy of , (W) | 3.171 × | 1.867 × |
| Maximum and receive energy ratio | 1.8547 | 1.9612 |
| Maximum instantaneous secrecy rate (bits/s/Hz) | 4.292 | 4.747 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, B.; Xu, D.; Ren, X.; Wang, Y.; Liu, J. Resource Allocation of UAV-Assisted IoT Node Secure Communication System. Signals 2023, 4, 591-603. https://doi.org/10.3390/signals4030031
Ma B, Xu D, Ren X, Wang Y, Liu J. Resource Allocation of UAV-Assisted IoT Node Secure Communication System. Signals. 2023; 4(3):591-603. https://doi.org/10.3390/signals4030031
Chicago/Turabian StyleMa, Biyun, Diyuan Xu, Xinyu Ren, Yide Wang, and Jiaojiao Liu. 2023. "Resource Allocation of UAV-Assisted IoT Node Secure Communication System" Signals 4, no. 3: 591-603. https://doi.org/10.3390/signals4030031
APA StyleMa, B., Xu, D., Ren, X., Wang, Y., & Liu, J. (2023). Resource Allocation of UAV-Assisted IoT Node Secure Communication System. Signals, 4(3), 591-603. https://doi.org/10.3390/signals4030031