Optimizing a Bi-Objective Mathematical Model for Minimizing Spraying Time and Drift Proportion




Abstract
:1. Introduction
2. Materials and Methods
2.1. Problem Definition
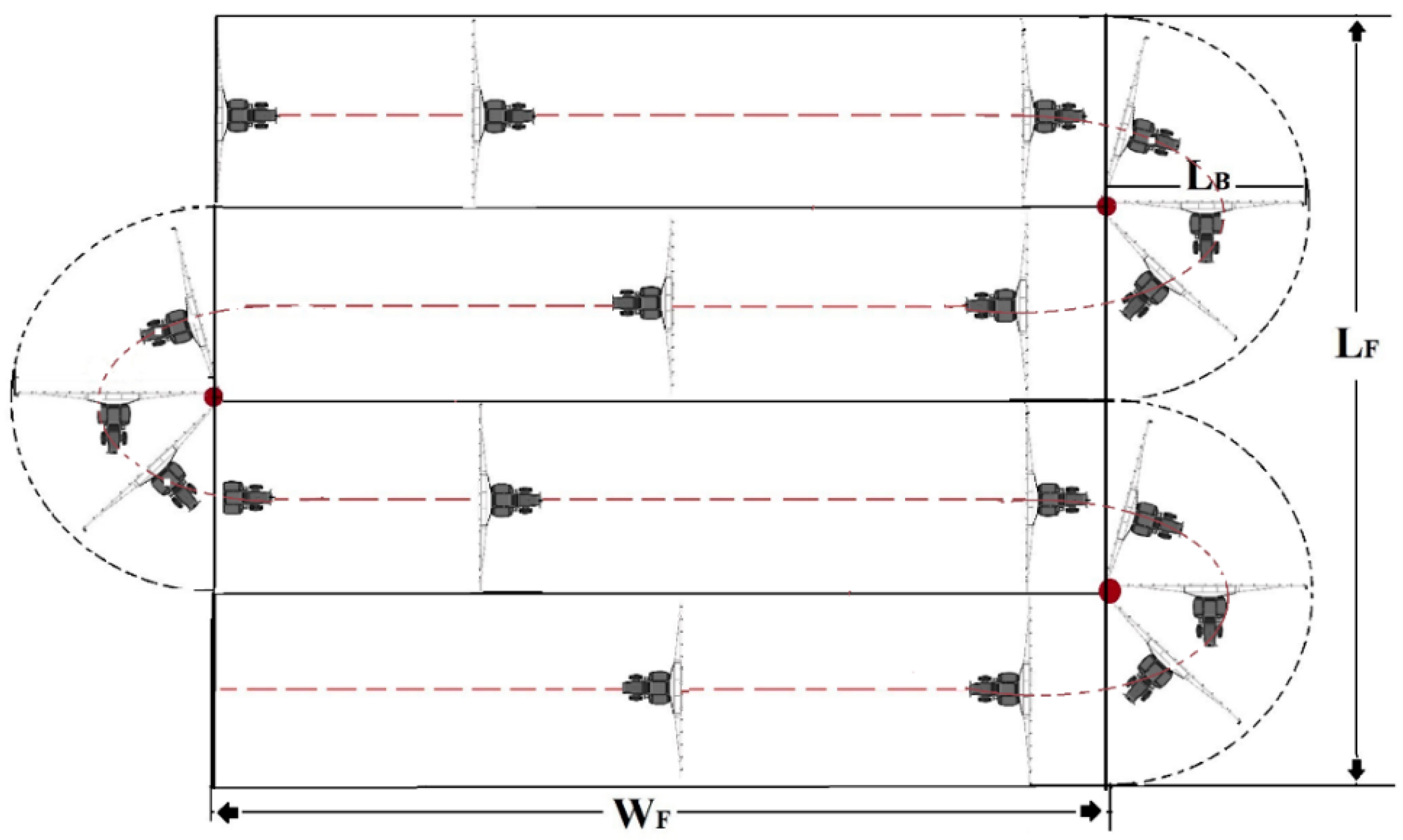
- To develop a formula to calculate the spraying time by considering the farm width, farm length, boom length, number of passes and tractor speed.
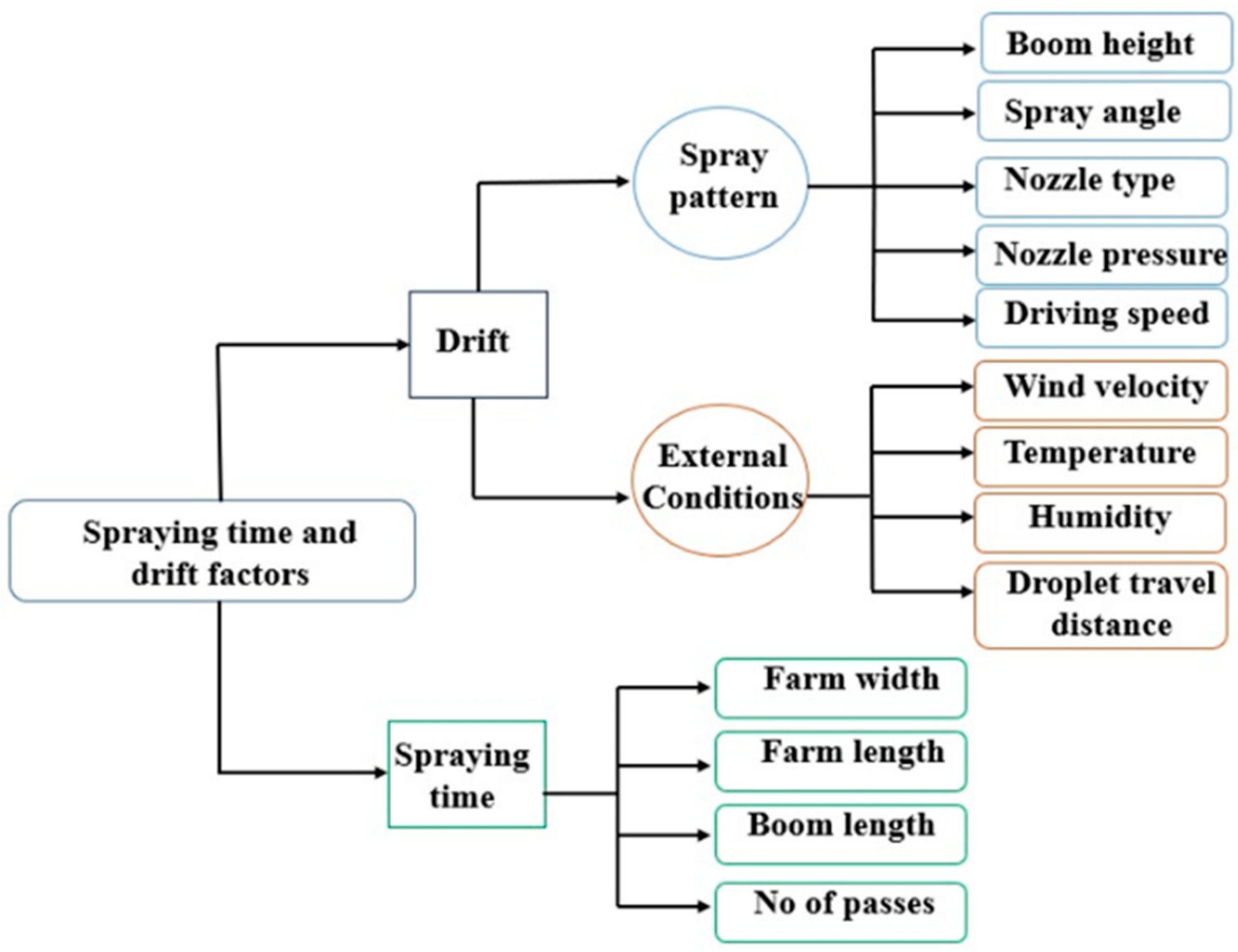
- To develop the spray drift model by considering the external conditions and spray pattern related factors.
- To build a model to determine spray settings that trades off the travel time and drift.
2.2. Model Formulation
2.2.1. Notation (Indices and Parameters)
2.2.2. Decision Variables
2.3. Formulation of the Spraying Time
2.4. Formulation of the Drift Proportion
2.4.1. External Conditions
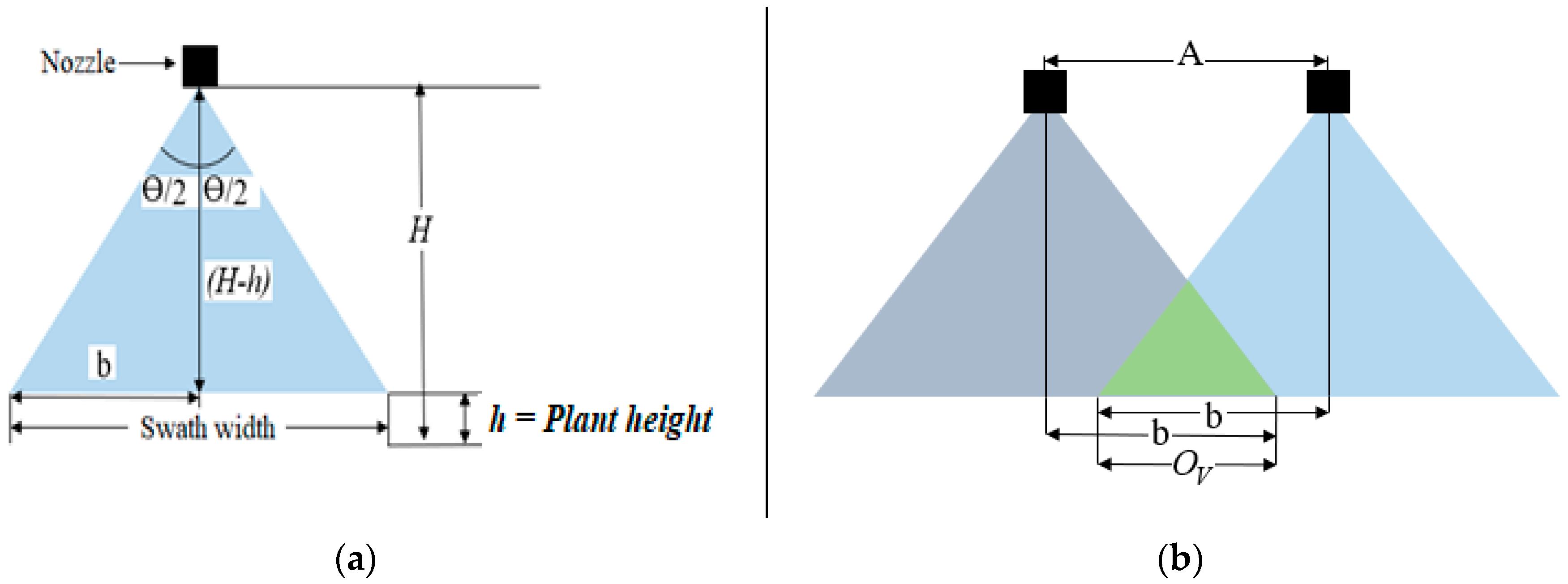
2.4.2. Operational or Spray Related Factors
2.4.3. Total Drift Formulation
2.5. Constraints: Levels Selection, Nozzle Spacing, and Overlapping of Spray Sheets
2.6. Bi-Objective Mathematical Model
2.7. Solution Approaches
2.7.1. Weighted Sum Method
2.7.2. ε-Constraint Method
3. Results and Discussion
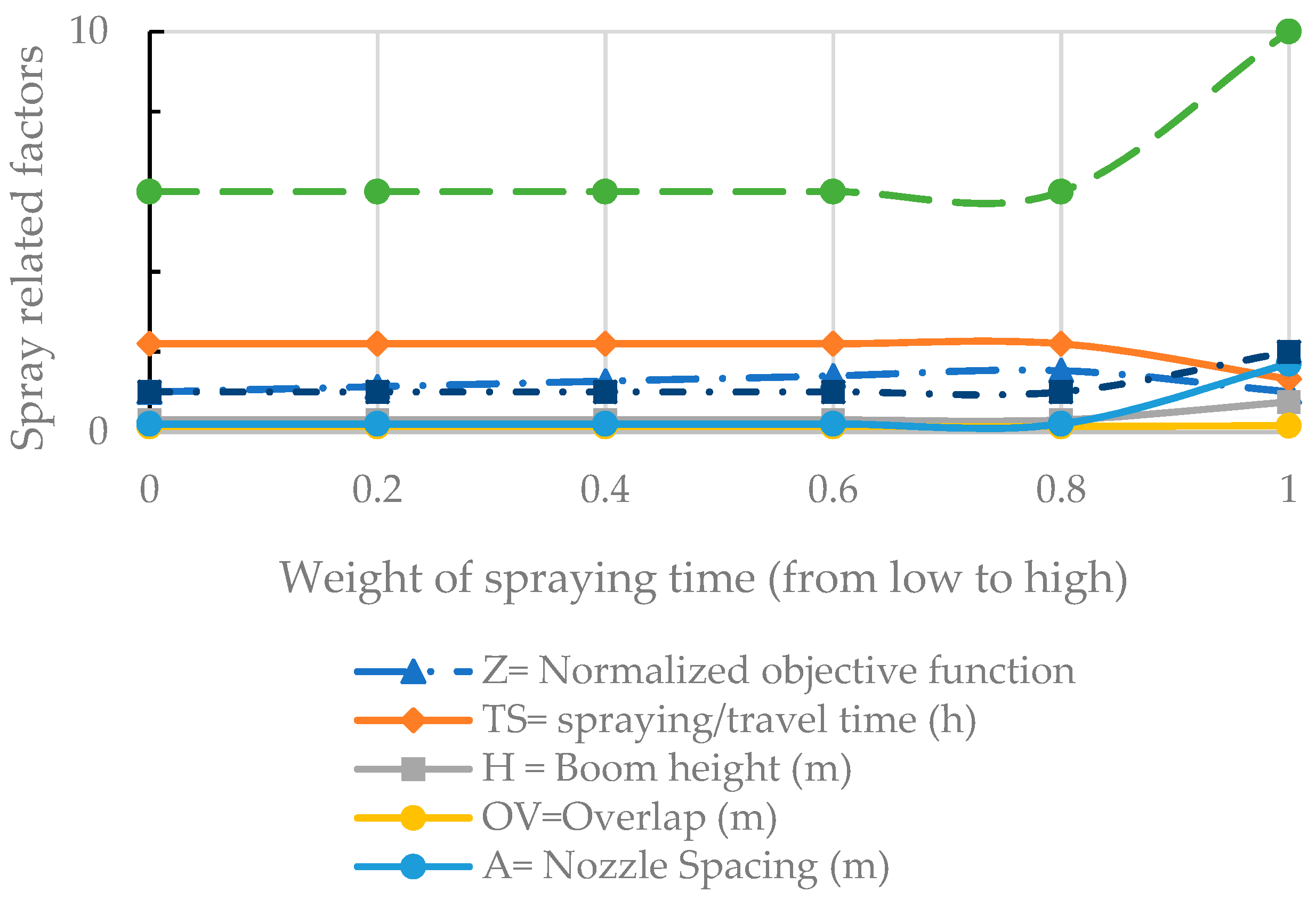
3.1. Experiment 1: Effects of Minimum Overlap in the Weighted Sums Method
3.1.1. Weighted Sum Results for 0 m Overlapping (Case 1)
3.1.2. Weighted Sum Results for 0.4 m Overlapping (Case 2)
3.1.3. Weighted Sum Results for 0.95 m Overlapping (Case 3)
3.2. Trade-Off between Drift Reduction and Spraying Time Using the ε-Constraint Method
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| A | Nozzle spacing (multiples of attachment spacing: where m = 1, 2, ...) |
| c | Number of tractor direction changes (passes) c = [WF/LB] |
| DB | Fraction of applied spray which is lost during spraying and/or after application |
| dd | Distance travelled by the spray particles in wind direction (m) (1 m, our study) |
| DS | Total specific drift proportion |
| F110 | Flat fan nozzle with spray angle of 110° |
| h | Plant height from ground to canopy (m) |
| Hj | Boom height level j from the ground (m) (H1 = 0.3, H2 = 0.5, H3 = 0.75) |
| i | Index for tractor speed levels |
| j | Index for boom height levels |
| k | Index for nozzle pressure levels |
| l | Spacing between consecutive nozzle attachments |
| LB | Boom length (m) |
| LD 110 | Low drift nozzle with spray angle of 110° |
| LF | Farm length (m) |
| n | Index for nozzle types |
| m | Nozzles are positioned at each m attachment location(s) with m = 1, 2, 3, … |
| Nn | Nozzle type n (F110 02, F110 03, F110 04, F110 06, LD110 02, LD110 03, LD110 04) |
| o | Index for spray angle levels |
| Omax | Maximum spray sheet overlap allowed |
| Omin | Minimum spray sheet overlap required |
| Ov | Overlapping of nozzle sheets (m) calculated as a function of A, Hj and θ. |
| Si | Tractor driving speed level i (km/h) (S1 = 4, S2 = 6, S3 = 8, S4 = 10) |
| S’ | Tractor speed while turning and not spraying (reduced speed) |
| T | Average air temperature (°C) |
| Td | Total drift (%) |
| Ts | Total spraying time (h) |
| V 3.25m | Average wind velocity at height of 3.25 m above the ground level (m/s) |
| WF | Farm width (m) |
| Z | Objective function |
| ζH2O | Absolute humidity (weight of water vapours in grams per kg of dry air) |
| Ɵo | Spray angle level o in degrees (°) (Ɵ1 = 110, Ɵ2 = 110) |
| ε | Epsilon |
References
- Farm Bill. U.S. Congress. Food, Agriculture, Conservation, and Trade Act of 1990; Public Law 101–624: U.S. Farm Bill; The National Center for Agricultural Law Research and Information University of Arkansas, 28 November 1990; Available online: https://nationalaglawcenter.org/wp-content/uploads/assets/farmbills/1990-1.pdf (accessed on 23 November 2018).
- Velten, S.; Leventon, J.; Jager, N.; Newig, J. What is sustainable agriculture? A systematic review. Sustainability 2015, 7, 7833–7865. [Google Scholar] [CrossRef]
- Al-Heidary, M.; Douzals, J.P.; Sinfort, C.; Vallet, A. Influence of spray characteristics on potential spray drift of field crop sprayers: A literature review. Crop Prot. 2014, 63, 120–130. [Google Scholar] [CrossRef]
- Pimentel, D. Environmental and economic costs of the application of pesticides primarily in the United States. Environ. Dev. Sustain. 2005, 7, 229–252. [Google Scholar] [CrossRef]
- Oerke, E.C. Crop losses to pests. J. Agric. Sci. 2006, 144, 31–43. [Google Scholar] [CrossRef]
- Huang, Y.; Zhan, W.; Fritz, B.K.; Thomson, S.J. Optimizing selection of controllable variables to minimize downwind drift from aerially applied sprays. Appl. Eng. Agric. ASABE 2011, 28, 307–314. [Google Scholar] [CrossRef]
- Bahrouni, H.; Sinfort, C.; Hamza, E. Evaluation of pesticide losses during cereal crop spraying in Tunisian conditions. In Proceedings of the 10th International Congress on Mechanization and Energy in Agriculture, Antalya, Turkey, 14–17 October 2008. [Google Scholar]
- Miller, P.C.H.; Butler, E.M.C. Effects of formulation on spray nozzle performance for applications from ground-based boom sprayers. Crop Prot. 2000, 19, 609–615. [Google Scholar] [CrossRef]
- Nuyttens, D.; Baetens, K.; De Schampheleire, M.; Sonck, B. Effect of nozzle type, size and pressure on spray droplet characteristics. Biosyst. Eng. 2007, 97, 333–345. [Google Scholar] [CrossRef]
- MacRae, R.J.; Hill, S.B.; Henning, J.; Mehuys, G.R. Agricultural Science and Sustainable Agriculture: A Review of the Existing Scientific Barriers to Sustainable Food Production and Potential Solutions. Biol. Agric. Hortic. 1989, 6, 173–219. [Google Scholar] [CrossRef]
- Chao, F.; Chengsheng, Z.; Fanyu, K.; Jing, W. Effects of spray height and spray angle on spray deposition in tobacco plants. In Proceedings of the 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011. [Google Scholar]
- Teske, M.E.; Thistle, H.W. A simulation of release height and wind speed effects for drift minimization. Trans. ASAE 1999, 42, 583–591. [Google Scholar] [CrossRef]
- De Jong, A.; Michielsen, J.M.G.P.; Stallinga, H.; Van de Zande, J.C. Effect of sprayer boom height on spray drift. In Proceedings of the 52nd International Symposium on Crop Protection, Gent, Belgium, 9 May 2000. [Google Scholar]
- Iqbal, M.; Ahmad, M.; Younis, M. Effect of Reynold’s number on droplet size of hollow cone nozzle of environment friendly university boom sprayer. Pak. J. Agric. Sci. 2005, 42, 106–111. [Google Scholar]
- Taylor, W.A.; Andersen, P.G.; Cooper, S. The use of air assistance in a field crop sprayer to reduce drift and modify drop trajectories. In Proceedings of the British Crop Protection Conference on Weeds, Alton, UK, 20–23 November 1989. [Google Scholar]
- Miller, P.C.H.; Smith, R.W. The Effects of Forward Speed on the Drift from Boom Sprayers; British Crop Protection Council: Alton, UK, 1997. [Google Scholar]
- Ghosh, S.; Hunt, J.C.R. Spray jets in a cross-flow. J. Fluid Mech. 1998, 365, 109–136. [Google Scholar] [CrossRef]
- Heijne, B.; Wenneker, M.; Van De Zande, J.C. Air inclusion nozzles don’t reduce pollution of surface water during orchard spraying in the Netherlands. Asp. Appl. Biol. Intl. Adv. Pest. Appl. 2002, 66, 193–199. [Google Scholar]
- Tobi, I.; Saglam, R.; Kup, F.; Sahin, H.; Bozdogan, A.M.; Piskin, B. Determination of accuracy level of agricultural spraying application in Sanliurfa/Turkey. Afr. J. Agri. Res. 2011, 6, 6064–6072. [Google Scholar]
- Nuyttens, D.; De Schampheleire, M.; Baetens, K.; Sonck, B. The influence of operator-controlled variables on spray drift from field crop sprayers. Trans. ASABE 2007, 50, 1129–1140. [Google Scholar] [CrossRef]
- Hwang, C.L.; Masud, A.S.M. Multiple Objective Decision Making—Methods and Applications, 1st ed.; Springer: Heidelberg/Berlin, Germany, 1979; pp. 21–283. [Google Scholar]
- Ghayebloo, S.; Tarokha, M.J.; Venkatadri, U.; Diallo, C. Developing a bi-objective model of the closed-loop supply chain network with green supplier selection and disassembly of products: The impact of parts reliability and product greenness on the recovery network. J. Manuf. Syst. 2015, 36, 76–86. [Google Scholar] [CrossRef]
- Lin, Y.; Linus, S. The global solver in the LINDO API. Optim. Methods Softw. 2009, 24, 657–668. [Google Scholar] [CrossRef]
- Nadeem, M.; Chang, Y.K.; Venkatadri, U.; Diallo, C.; Havard, P.; Nguyen-Quang, T. Water quantification from sprayer nozzle by using particle image velocimetry (PIV) versus imaging processing technique. Pak. J. Agric. Sci. 2018, 55, 203–210. [Google Scholar]
- Alaa, S.; Marek, M.; Stanisław, P.; Józef, S. Testing the uniformity of spray distribution under different application parameters. In Proceedings of the IX International Scientific Symposium Farm Machinery and Processes Management in Sustainable Agriculture, Lublin, Poland, 22–24 November 2017; pp. 259–264. [Google Scholar]
- Nasir, S.H.; Nor, A.C.S.; Sidikand, J.M.S. Effect of nozzle type, angle and pressure on spray volumetric distribution of broadcasting and banding application. J. Mech. Eng. Res. 2013, 5, 76–81. [Google Scholar] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nozzle Pressure | Height of Boom | ||||
|---|---|---|---|---|---|
| K | Pk (bars) | (%) | j | Hj (m) | (%) |
| 1 | P1 = 2 | 0 | 1 | H1 = 0.3 | 0 |
| 2 | P2 = 3 | 3.5 | 2 | H2 = 0.5 | 3 |
| 3 | P3 = 4 | 6.5 | 3 | H3 = 0.75 | |
| Speed of tractor | Nozzle type | 8 | |||
| I | Si (km/h) | (%) | n | Nn | (%) |
| 1 | S1 = 4 | 0.6 | 1 | N1 = F110 04 | (%) |
| 2 | S2 = 6 | 0 | 2 | N2 = F110 06 | 18.5 |
| 3 | S3 = 8 | 2.7 | 3 | N3 = F110 03 | 4 |
| 4 | S4 = 10 | 2.1 | 4 | N4 = F110 02 | 1.5 |
| 5 | N5 = LD110 02 | 2 | |||
| 6 | N6 = LD110 03 | 6.5 | |||
| 7 | N7 = LD110 04 | 3.5 | |||
| 0 | |||||
| Case # 1: 0 m Minimum Overlap | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| w | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
| Z | 1.00 | 1.07 | 1.13 | 1.20 | 1.27 | 1.33 | 1.40 | 1.47 | 1.53 | 1.60 | 1.00 |
| TS | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 1.32 |
| H | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 |
| OV | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 | 0.349 |
| A | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 |
| n | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | F110.02 |
| P | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| s | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 10 |
| Case # 2: 0.40 m Minimum Overlap | |||||||||||
| w | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
| Z | 1 | 1.07 | 1.13 | 1.20 | 1.27 | 1.33 | 1.28 | 1.21 | 1.14 | 1.07 | 1 |
| TS | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 1.32 | 1.32 | 1.32 | 1.32 | 1.32 |
| H | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| OV | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 | 0.9201 |
| A | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 |
| n | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 |
| P | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| s | 6 | 6 | 6 | 6 | 6 | 6 | 10 | 10 | 10 | 10 | 10 |
| Case # 3: 0.95 m Minimum Overlap | |||||||||||
| w | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
| Z | 1 | 1.07 | 1.13 | 1.20 | 1.16 | 1.13 | 1.11 | 1.08 | 1.05 | 1.03 | 1 |
| TS | 2.20 | 2.20 | 2.20 | 2.20 | 1.32 | 1.32 | 1.32 | 1.32 | 1.32 | 1.32 | 1.32 |
| H | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 | 0.75 |
| OV | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 | 1.63 |
| A | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 | 50.8 |
| n | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 | LD110.04 |
| P | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| s | 6 | 6 | 6 | 6 | 6 | 10 | 10 | 10 | 10 | 10 | 10 |
| Nozzle Type | Height of Boom | ||||
|---|---|---|---|---|---|
| n | Nn | (%) | j | Hj (m) | (%) |
| 1 | N1 = F110 04 | 18 | 1 | H1 = 0.30 | 0.0 |
| 2 | N2 = F110 06 | 3.5 | 2 | H2 = 0.35 | 0.8 |
| 3 | N3 = F110 03 | 1.0 | 3 | H3 = 0.40 | 1.5 |
| 4 | N4 = F110 02 | 1.5 | 4 | H4 = 0.45 | 2.3 |
| 5 | N5 = F80 04 | 8.5 | 5 | H5 = 0.50 | 3.0 |
| 6 | N6 = F80 06 | 1.5 | 6 | H6 = 0.55 | 4.0 |
| 7 | N7 = F80 03 | 0.3 | 7 | H7 = 0.60 | 5.0 |
| 8 | N8 = F80 02 | 0.5 | 8 | H8 = 0.65 | 6.5 |
| 9 | N9 = F65 04 | 3.5 | 9 | H9 = 0.75 | 8.0 |
| 10 | N10 = F65 06 | 0.5 | |||
| 11 | N11 = F65 03 | 0.0 | |||
| Case # 4: 0 m Minimum Overlap | ||||||
|---|---|---|---|---|---|---|
| w | 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
| Z | 1.00 | 1.13 | 1.27 | 1.40 | 1.53 | 1.00 |
| TS | 2.20 | 2.20 | 2.20 | 2.20 | 2.20 | 1.32 |
| H | 0.30 | 0.30 | 0.30 | 0.30 | 0.30 | 0.35 |
| OV | 0.055 | 0.055 | 0.055 | 0.055 | 0.055 | 0.02 |
| A | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.4 |
| n | F65.03 | F65.03 | F65.03 | F65.03 | F65.03 | F110.04 |
| s | 6 | 6 | 6 | 6 | 6 | 10 |
| Case # 5: 0.1 m minimum overlap | ||||||
| w | 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
| Z | 1 | 1.13 | 1.27 | 1.4 | 1.53 | 1 |
| TS | 2.202 | 2.202 | 2.202 | 2.202 | 2.202 | 1.3212 |
| H | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.75 |
| OV | 0.136 | 0.136 | 0.136 | 0.136 | 0.136 | 0.157 |
| A | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 1.7 |
| n | F80.03 | F80.03 | F80.03 | F80.03 | F80.03 | F110.04 |
| s | 6 | 6 | 6 | 6 | 6 | 10 |
| Case # 6: 0.4 m minimum overlap | ||||||
| w | 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
| Z | 1.00 | 1.13 | 1.27 | 1.28 | 1.14 | 1.00 |
| TS | 2.202 | 2.202 | 2.202 | 1.321 | 1.321 | 1.321 |
| H | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.75 |
| OV | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.86 |
| A | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 1 |
| n | F110.03 | F110.03 | F110.03 | F110.03 | F110.03 | F110.04 |
| s | 6 | 6 | 6 | 10 | 10 | 10 |
| Ovmin = 0.0 m | Ovmin = 0.4 m | |||||
|---|---|---|---|---|---|---|
| Epsilon (h) | 3.0 | 2.0 | 1.0 | 3.0 | 2.0 | 1.0 |
| Z2 | 0.00 | 2.1 | Infeasible | 3.00 | 5.1 | Infeasible |
| TS | 2.20 | 1.32 | 2.20 | 1.32 | ||
| H | 0.30 | 0.30 | 0.50 | 0.50 | ||
| OV | 0.35 | 0.35 | 0.92 | 0.92 | ||
| A | 0.508 | 0.508 | 0.508 | 0.508 | ||
| n | LD110.04 | LD110.04 | LD110.04 | LD110.04 | ||
| P | 2 | 2 | 2 | 2 | ||
| s | 6 | 10 | 6 | 10 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nadeem, M.; Diallo, C.; Nguyen-Quang, T.; Venkatadri, U.; Havard, P. Optimizing a Bi-Objective Mathematical Model for Minimizing Spraying Time and Drift Proportion. AgriEngineering 2019, 1, 418-433. https://doi.org/10.3390/agriengineering1030031
Nadeem M, Diallo C, Nguyen-Quang T, Venkatadri U, Havard P. Optimizing a Bi-Objective Mathematical Model for Minimizing Spraying Time and Drift Proportion. AgriEngineering. 2019; 1(3):418-433. https://doi.org/10.3390/agriengineering1030031
Chicago/Turabian StyleNadeem, Muhammad, Claver Diallo, Tri Nguyen-Quang, Uday Venkatadri, and Peter Havard. 2019. "Optimizing a Bi-Objective Mathematical Model for Minimizing Spraying Time and Drift Proportion" AgriEngineering 1, no. 3: 418-433. https://doi.org/10.3390/agriengineering1030031
APA StyleNadeem, M., Diallo, C., Nguyen-Quang, T., Venkatadri, U., & Havard, P. (2019). Optimizing a Bi-Objective Mathematical Model for Minimizing Spraying Time and Drift Proportion. AgriEngineering, 1(3), 418-433. https://doi.org/10.3390/agriengineering1030031