
A fsQCA-Based Framework for Cybersecurity of Connected and Automated Vehicles: Implications for Sustainable Development Goals





Abstract
:1. Introduction
- RQ1: What are the most vulnerable security attacks that threaten the cybersecurity of CAVs?
- RQ2: What countermeasures and strategies have been employed to mitigate these attacks?
- RQ3: Will removing these attacks ensure the cybersecurity of CAVs?
2. Literature Review
2.1. Connected and Automated Vehicles (CAV)
2.2. Security Attacks That Pose a Threat to the Cybersecurity of CAV
2.3. Research Gap and Contributions
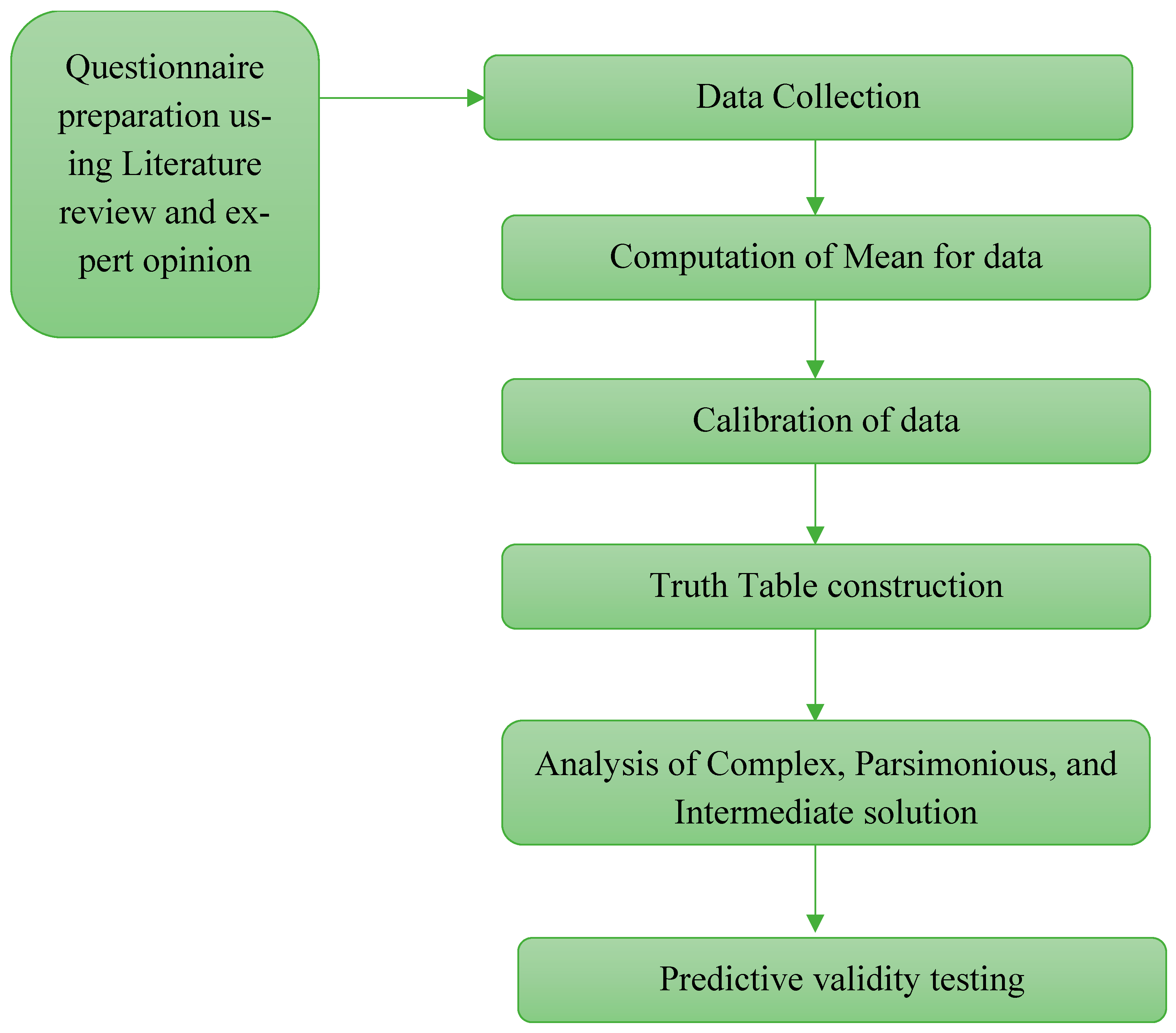
3. Research Methodology
3.1. Data Collection, Sampling, and Survey Instrument
3.2. Reliability and Validity Analysis
- Calculations for CR, ICR, and AVE using SPSS.
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.847 | 0.853 | 3 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| Multiple GPS sensor | 3.8958 | 0.95069 | 48 |
| Redundant sensor | 3.6667 | 0.75324 | 48 |
| LiDAR | 3.3958 | 0.76463 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| Multiple GPS sensor | 7.0625 | 1.890 | 0.738 | 0.566 | 0.781 |
| Redundant sensor | 7.2917 | 2.551 | 0.666 | 0.450 | 0.833 |
| LiDAR | 7.5625 | 2.336 | 0.770 | 0.597 | 0.741 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 10.9583 | 4.722 | 2.17293 | 3 |
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.909 | 0.911 | 6 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| Fog server | 2.7292 | 0.86884 | 48 |
| Data filtering | 2.7708 | 0.75059 | 48 |
| Swarm algorithm | 2.7292 | 0.73628 | 48 |
| Bandwidth detection | 2.5417 | 0.77070 | 48 |
| Noisy control signals | 2.4375 | 0.98729 | 48 |
| TFD | 2.3958 | 0.89299 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| Fog server | 12.8750 | 12.197 | 0.739 | 0.562 | 0.894 |
| Data filtering | 12.8333 | 12.780 | 0.763 | 0.607 | 0.892 |
| Swarm algorithm | 12.8750 | 13.346 | 0.660 | 0.492 | 0.905 |
| Bandwidth detection | 13.0625 | 12.570 | 0.782 | 0.652 | 0.889 |
| Noisy control signals | 13.1667 | 10.993 | 0.835 | 0.718 | 0.880 |
| TFD | 13.2083 | 12.083 | 0.734 | 0.617 | 0.895 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 15.6042 | 17.436 | 4.17561 | 6 |
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.893 | 0.893 | 4 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| Encryption | 2.5625 | 0.89695 | 48 |
| Network segmentation | 2.5833 | 0.91868 | 48 |
| Aurhentication | 2.5000 | 0.92253 | 48 |
| Content filtering | 2.5208 | 0.89893 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| Encryption | 7.6042 | 5.861 | 0.771 | 0.599 | 0.859 |
| Network segmentation | 7.5833 | 5.610 | 0.818 | 0.680 | 0.841 |
| Aurhentication | 7.6667 | 6.014 | 0.696 | 0.487 | 0.887 |
| Content filtering | 7.6458 | 5.851 | 0.772 | 0.619 | 0.859 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 10.1667 | 10.014 | 3.16452 | 4 |
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.870 | 0.870 | 3 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| CL-A-SC | 2.9167 | 0.87113 | 48 |
| SDN | 2.6458 | 0.86269 | 48 |
| Cloud-based detection | 2.4792 | 0.87494 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| CL-A-SC | 5.1250 | 2.495 | 0.781 | 0.611 | 0.790 |
| SDN | 5.3958 | 2.627 | 0.726 | 0.531 | 0.840 |
| Cloud-based detection | 5.5625 | 2.549 | 0.747 | 0.566 | 0.821 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 8.0417 | 5.402 | 2.32432 | 3 |
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.872 | 0.873 | 3 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| Data mining | 3.2292 | 0.97281 | 48 |
| TCU | 3.3333 | 0.99645 | 48 |
| CVSS | 2.7292 | 1.02604 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| Data mining | 6.0625 | 3.422 | 0.772 | 0.611 | 0.804 |
| TCU | 5.9583 | 3.317 | 0.782 | 0.622 | 0.795 |
| CVSS | 6.5625 | 3.400 | 0.712 | 0.507 | 0.859 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 9.2917 | 7.147 | 2.67342 | 3 |
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.852 | 0.852 | 4 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| Data sanitization | 3.0417 | 0.87418 | 48 |
| Privacy homomorphism | 3.3125 | 0.80309 | 48 |
| Neural networks | 3.2708 | 0.73628 | 48 |
| Dynamic risk assessment | 3.4167 | 0.79448 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| Data sanitization | 10.0000 | 3.872 | 0.730 | 0.559 | 0.796 |
| Privacy homomorphism | 9.7292 | 4.202 | 0.699 | 0.512 | 0.808 |
| Neural networks | 9.7708 | 4.521 | 0.666 | 0.489 | 0.823 |
| Dynamic risk assessment | 9.6250 | 4.282 | 0.679 | 0.497 | 0.816 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 13.0417 | 7.147 | 2.67342 | 4 |
| Reliability Statistics | ||
| Cronbach’s Alpha | Cronbach’s Alpha Based on Standardized Items | N of Items |
| 0.854 | 0.862 | 3 |
| Item Statistics | |||
| Mean | Std. Deviation | N | |
| ITS | 3.3750 | 1.02366 | 48 |
| Cybersecurity | 3.1458 | 0.79866 | 48 |
| Reduced attacker intention | 3.1250 | 0.91384 | 48 |
| Item-Total Statistics | |||||
| Scale Mean If Item Deleted | Scale Variance If Item Deleted | Corrected Item-Total Correlation | Squared Multiple Correlation | Cronbach’s Alpha If Item Deleted | |
| ITS | 6.2708 | 2.500 | 0.712 | 0.530 | 0.821 |
| Cybersecurity | 6.5000 | 3.021 | 0.789 | 0.623 | 0.754 |
| Reduced attacker intention | 6.5208 | 2.851 | 0.702 | 0.518 | 0.817 |
| Scale Statistics | |||
| Mean | Variance | Std. Deviation | N of Items |
| 9.6458 | 5.851 | 2.41881 | 3 |
- AVE and CR
| Λ | λ2 | 1 − λ2 | CR | AVE |
| 0.878 | 0.770884 | 0.229116 | 0.966424 | 0.734851 |
| 0.792 | 0.627264 | 0.372736 | ||
| 0.898 | 0.806404 | 0.193596 |
| Λ | λ2 | 1 − λ2 | CR | AVE |
| 0.848 | 0.719104 | 0.280896 | 0.98801 | 0.645291 |
| 0.801 | 0.641601 | 0.358399 | ||
| 0.764 | 0.583696 | 0.416304 | ||
| 0.833 | 0.693889 | 0.306111 | ||
| 0.849 | 0.720801 | 0.279199 | ||
| 0.716 | 0.512656 | 0.487344 |
| Λ | λ2 | 1 − λ2 | CR | AVE |
| 0.781 | 0.609961 | 0.390039 | 0.964828 | 0.670849 |
| 0.897 | 0.804609 | 0.195391 | ||
| 0.796 | 0.633616 | 0.366384 | ||
| 0.797 | 0.635209 | 0.364791 |
| Λ | λ2 | 1 − λ2 | CR | AVE |
| 0.877 | 0.769129 | 0.230871 | 0.965346 | 0.715194 |
| 0.817 | 0.667489 | 0.332511 | ||
| 0.842 | 0.708964 | 0.291036 |
| Λ | λ2 | 1 − λ2 | ||
| 0.887 | 0.786769 | 0.213231 | 0.969806 | 0.761937 |
| 0.901 | 0.811801 | 0.188199 | ||
| 0.829 | 0.687241 | 0.312759 |
| Λ | λ2 | 1 − λ2 | CR | AVE |
| 0.808 | 0.652864 | 0.347136 | 0.968294 | 0.663694 |
| 0.854 | 0.729316 | 0.270684 | ||
| 0.764 | 0.583696 | 0.416304 | ||
| 0.83 | 0.6889 | 0.3111 |
| Λ | λ2 | 1 − λ2 | CR | AVE |
| 0.845 | 0.714025 | 0.285975 | 0.958219 | 0.728897 |
| 0.871 | 0.758641 | 0.241359 | ||
| 0.845 | 0.714025 | 0.285975 |
3.3. fsQCA—Fuzzy Set Qualitative Comparative Analysis
3.3.1. Calibration of Data
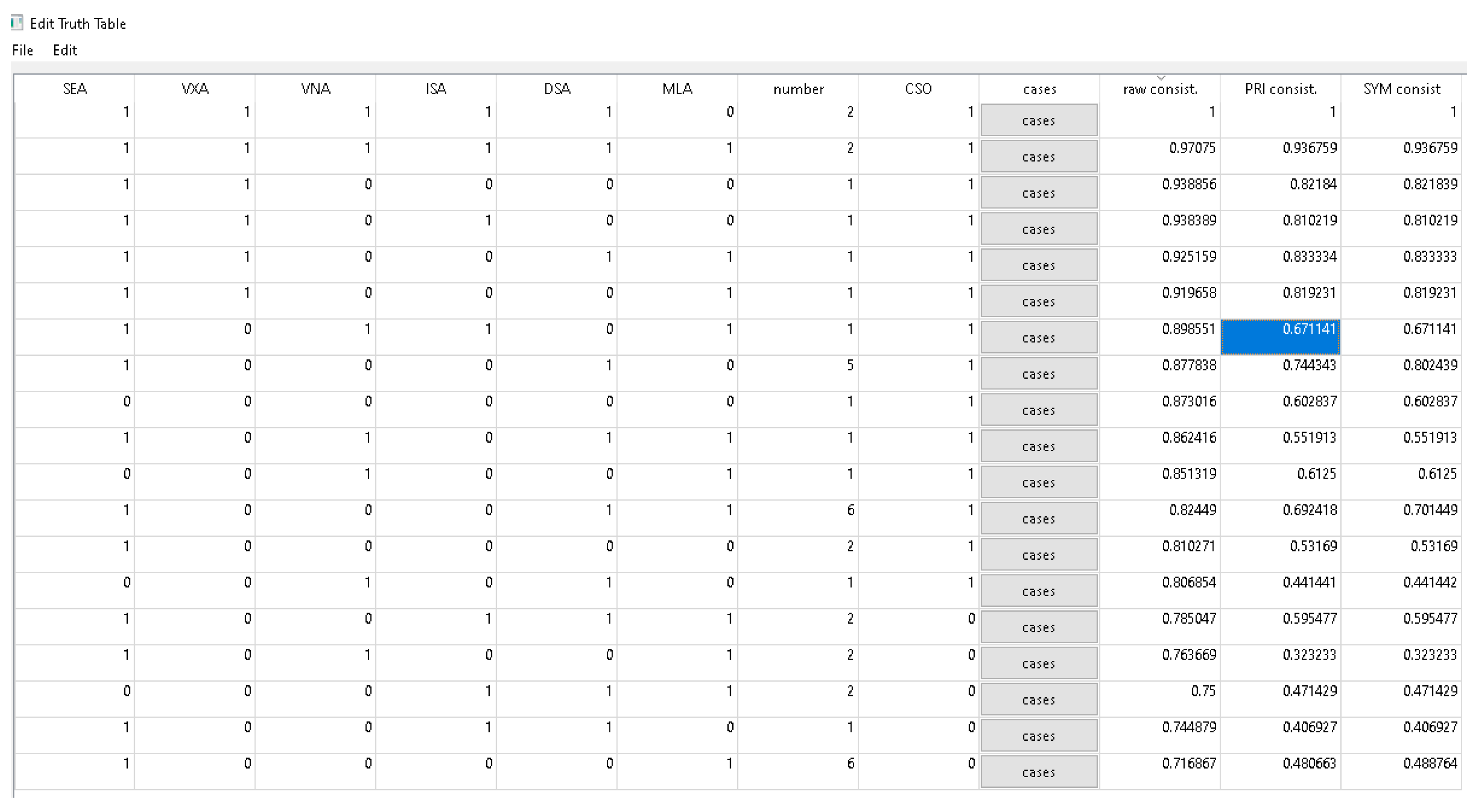
3.3.2. Truth Table Construction
3.3.3. Analysis of Solutions
4. Results from fsQCA
Practical Case Studies
- Case Study 1: Implementation in Automotive Manufacturing
- Case Study 2: Cybersecurity Assessment in Vehicle-to-Everything (V2X) Communication
- Case Study 3: Integrating Cybersecurity Measures in Automotive Design
5. Discussions
6. Research Implications
6.1. Theoretical Implications
6.2. Managerial Implications
6.3. Long-Term Impacts and Future Research Directions
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Construct | Attack No. | Statements | Strongly Disagree | Disagree | Neutral | Agree | Strongly Agree |
|---|---|---|---|---|---|---|---|
| Input | |||||||
| Sensor attack assessment (SEA) | P1 | Using multiple GPS receivers avoids blocking of satellite signals from GPS. | |||||
| P2 | Usage of redundant sensors on camera verification to avoid illusion and binding | ||||||
| P3 | Jamming avoidance by making protective glasses around a LiDAR which acts as light filters | ||||||
| Vehicle-to-everything network assessment (VXA) | P4 | Usage of fog server with fog anonymizer to avoid eavesdropping in vehicular ad-hoc networks (VANETs) | |||||
| P5 | Maintaining data integrity in dynamic route guidance by forged data filtering scheme | ||||||
| P6 | Using swarm algorithms for routing attacks | ||||||
| P7 | Detecting bandwidth and entropy to reduce denial of service attack | ||||||
| P8 | Implementing noisy control signals to avoid replay attacks | ||||||
| P9 | Registering vehicles with TFD to avoid communication of attackers who are under victim identity | ||||||
| In-Vehicle network assessment (VNA) | P10 | Encryption and cryptographic checksum to avoid close proximity vulnerabilities | |||||
| P11 | Doing network segmentation to avoid CAN and SAE vulnerabilities | ||||||
| P12 | Encryption and authentication to avoid flashing attacks | ||||||
| P13 | Content filtering for integrated business service attacks | ||||||
| Infrastructure network assessment (ISA) | P14 | Usage of certificateless aggregate signcryption (CL-A-SC) scheme to monitor road surface conditions | |||||
| P15 | Incorporating software defined networking (SDN) in IoT environment | ||||||
| P16 | Using cloud-based detection system for cloud infrastructure | ||||||
| Data storage assessment (DSA) | P17 | Conserving data mining to protect privacy leakage of user information | |||||
| P18 | Using telematics control unit (TCU) for remote control of vehicles | ||||||
| P19 | Adopting CVSS (common vulnerability scoring system) to measure severity of software vulnerabilities | ||||||
| Machine learning system assessment (MLA) | P20 | Performing data sanitization and robust learning to defend against misleading in learning process | |||||
| P21 | Ensuring privacy of data by privacy homomorphism | ||||||
| P22 | Implementing neural networks for privacy assurance | ||||||
| P23 | Assessing risks earlier using dynamic risk assessment | ||||||
| Output | |||||||
| Cybersecurity of CAV (CSO) | P24 | Providing better solutions for security issues in connected and automated vehicles (CAV) | |||||
| P25 | Strengthening the cybersecurity patterns | ||||||
| P26 | Reduces attacker intentions in connected and automated vehicles | ||||||
| Demographic Information | |||||
|---|---|---|---|---|---|
| Company Name | |||||
| Designation of Respondent in The Company | Chief Technical Officer | Automobile Designer | Production Engineer | Automotive Developer | Instrumentation Engineer |
| E-mail of the respondent | |||||
| Work experience of respondent | Below 3 years | 3 to 5 years | 5 to 10 years | More than 10 years | |
References
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of Connected and Automated Vehicles: State of the Art and Future Challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef]
- Elliott, D.; Keen, W.; Miao, L. Recent Advances in Connected and Automated Vehicles. J. Traffic Transp. Eng. (Engl. Ed.) 2019, 6, 109–131. [Google Scholar] [CrossRef]
- Alnasser, A.; Sun, H.; Jiang, J. Cyber Security Challenges and Solutions for V2X Communications: A Survey. Comput. Netw. 2019, 151, 52–67. [Google Scholar] [CrossRef]
- Alwakeel, A.M.; Alnaim, A.K.; Fernandez, E.B. A Survey of Network Function Virtualization Security. In Proceedings of the SoutheastCon 2018, St. Petersburg, FL, USA, 19–22 April 2018; pp. 1–8. [Google Scholar]
- Chattopadhyay, A.; Lam, K.-Y.; Tavva, Y. Autonomous Vehicle: Security by Design. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7015–7029. [Google Scholar] [CrossRef]
- Becker, J.C.; Simon, A. Sensor and Navigation Data Fusion for an Autonomous Vehicle. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No.00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 156–161. [Google Scholar]
- Figueiredo, L.; Jesus, I.; Machado, J.A.T.; Ferreira, J.R.; Martins de Carvalho, J.L. Towards the Development of Intelligent Transportation Systems. In Proceedings of the ITSC 2001, 2001 IEEE Intelligent Transportation Systems, Proceedings (Cat. No.01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 1206–1211. [Google Scholar]
- Lee, D.; Hess, D.J. Regulations for On-Road Testing of Connected and Automated Vehicles: Assessing the Potential for Global Safety Harmonization. Transp. Res. Part A Policy Pract. 2020, 136, 85–98. [Google Scholar] [CrossRef]
- Vahidi, A.; Sciarretta, A. Energy Saving Potentials of Connected and Automated Vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 822–843. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ Long-Term Adoption of Connected and Autonomous Vehicle Technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Uhlemann, E. Introducing Connected Vehicles [Connected Vehicles]. IEEE Veh. Technol. Mag. 2015, 10, 23–31. [Google Scholar] [CrossRef]
- Bajpai, J.N. Emerging Vehicle Technologies & the Search for Urban Mobility Solutions. Urban Plan. Transp. Res. 2016, 4, 83–100. [Google Scholar] [CrossRef]
- Yang, C.Y.D.; Fisher, D.L. Safety Impacts and Benefits of Connected and Automated Vehicles: How Real Are They? J. Intell. Transp. Syst. 2021, 25, 135–138. [Google Scholar] [CrossRef]
- Khan, S.K.; Shiwakoti, N.; Stasinopoulos, P.; Warren, M. Modelling cybersecurity regulations for automated vehicles. Accid. Anal. Prev. 2023, 186, 107054. [Google Scholar] [CrossRef] [PubMed]
- Rana, M.M.; Hossain, K. Connected and autonomous vehicles and infrastructures: A literature review. Int. J. Pavement Res. Technol. 2023, 16, 264–284. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, Y.; Zhang, J.; Tian, C.; Ren, R.; Han, T.; Proctor, R.W. Human-centred design of next generation transportation infrastructure with connected and automated vehicles: A system-of-systems perspective. Theor. Issues Ergon. Sci. 2023, 1–29. [Google Scholar] [CrossRef]
- Vdovic, H.; Babic, J.; Podobnik, V. Automotive Software in Connected and Autonomous Electric Vehicles: A Review. IEEE Access 2019, 7, 166365–166379. [Google Scholar] [CrossRef]
- Basu, R.; Araldo, A.; Akkinepally, A.P.; Nahmias Biran, B.H.; Basak, K.; Seshadri, R.; Deshmukh, N.; Kumar, N.; Azevedo, C.L.; Ben-Akiva, M. Automated Mobility-on-Demand vs. Mass Transit: A Multi-Modal Activity-Driven Agent-Based Simulation Approach. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 608–618. [Google Scholar] [CrossRef]
- Deka, D.; Blickstein, S.G.; Brown, C.T.; Rosenthal, S.; Yang, S. The Perception of Autonomous Vehicles’ Traffic Safety Impact on People with Disability, Pedestrians, and Bicyclists Report Authors: Acknowledgments. New Jersey Bicycle and Pedestrian Resource Center. 2021. Available online: https://njbikeped.org/wp-content/uploads/2022/09/AV-Safety-Perception-Report.pdf (accessed on 20 December 2023).
- Arif, M.; Wang, G.; Zakirul Alam Bhuiyan, M.; Wang, T.; Chen, J. A Survey on Security Attacks in VANETs: Communication, Applications and Challenges. Veh. Commun. 2019, 19, 100179. [Google Scholar] [CrossRef]
- Chen, H.; Liu, J.; Wang, J.; Xun, Y. Towards secure intra-vehicle communications in 5G advanced and beyond: Vulnerabilities, attacks and countermeasures. Veh. Commun. 2023, 39, 100548. [Google Scholar] [CrossRef]
- Thantharate, P.; Thantharate, A.; Kulkarni, A. GREENSKY: A Fair Energy-Aware Optimization Model for UAVs in Next-Generation Wireless Networks. Green Energy Intell. Transp. 2023, 3, 100130. [Google Scholar] [CrossRef]
- Khan, J.A.; Wang, L.; Jacobs, E.; Talebian, A.; Mishra, S.; Santo, C.A.; Golias, M.; Astorne-Figari, C. Smart Cities Connected and Autonomous Vehicles Readiness Index. In Proceedings of the 2nd ACM/EIGSCC Symposium on Smart Cities and Communities, Portland, OR, USA, 10–12 September 2019; ACM: New York, NY, USA, 2019; pp. 1–8. [Google Scholar]
- Huo, Y.; Tu, W.; Sheng, Z.; Leung, V.C.M. A Survey of In-Vehicle Communications: Requirements, Solutions and Opportunities in IoT. In Proceedings of the 2015 IEEE 2nd World Forum on Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 132–137. [Google Scholar]
- Lin, L. Deep Learning-Based Human-Driven Vehicle Trajectory Prediction and Its Application for Platoon Control of Connected and Autonomous Vehicles. In Proceedings of the Automated Vehicles Symposium 2018, San Francisco, CA, USA, 9–12 July 2018; pp. 1–30. [Google Scholar]
- Anwar, A.; Anwar, A.; Moukahal, L.; Zulkernine, M. Security assessment of in-vehicle communication protocols. Veh. Commun. 2023, 44, 100639. [Google Scholar] [CrossRef]
- Muhammad, Z.; Anwar, Z.; Saleem, B.; Shahid, J. Emerging Cybersecurity and Privacy Threats to Electric Vehicles and Their Impact on Human and Environmental Sustainability. Energies 2023, 16, 1113. [Google Scholar] [CrossRef]
- Chen, X.; Xu, B.; Qin, X.; Bian, Y.; Hu, M.; Sun, N. Non-Signalized Intersection Network Management With Connected and Automated Vehicles. IEEE Access 2020, 8, 122065–122077. [Google Scholar] [CrossRef]
- Nagarajan, J.; Mansourian, P.; Shahid, M.A.; Jaekel, A.; Saini, I.; Zhang, N.; Kneppers, M. Machine Learning based intrusion detection systems for connected autonomous vehicles: A survey. Peer-to-Peer Netw. Appl. 2023, 16, 2153–2185. [Google Scholar] [CrossRef]
- Bertino, E.; Ferrari, E. Big data security and privacy. In A Comprehensive Guide through the Italian Database Research over the Last 25 Years; Springer International Publishing: Cham, Switzerland, 2017; pp. 425–439. [Google Scholar]
- Han, J.; Ju, Z.; Chen, X.; Yang, M.; Zhang, H.; Huai, R. Secure Operations of Connected and Autonomous Vehicles. IEEE Trans. Intell. Veh. 2023, 8, 4484–4497. [Google Scholar] [CrossRef]
- Chowdhury, M.; Islam, M.; Khan, Z. Security of Connected and Automated Vehicles. Bridge 2019, 49, 46–56. [Google Scholar]
- Parkinson, S.; Ward, P.; Wilson, K.; Miller, J. Cyber Threats Facing Autonomous and Connected Vehicles: Future Challenges. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2898–2915. [Google Scholar] [CrossRef]
- Alsobeh, A.; Shatnawi, A. Integrating Data-Driven Security, Model Checking, and Self-adaptation for IoT Systems Using BIP Components: A Conceptual Proposal Model. In Proceedings of the 2023 International Conference on Advances in Computing Research, Orlando, FL, USA, 8–10 May 2023; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 533–549. [Google Scholar]
- Takefuji, Y. Connected Vehicle Security Vulnerabilities [Commentary]. IEEE Technol. Soc. Mag. 2018, 37, 15–18. [Google Scholar] [CrossRef]
- Monteuuis, J.-P.; Petit, J.; Zhang, J.; Labiod, H.; Mafrica, S.; Servel, A. Attacker Model for Connected and Automated Vehicles. In Proceedings of the ACM Computer Science in Car Symposium, Munich, Germany, 13–14 September 2018. [Google Scholar]
- Sun, X.; Yu, F.R.; Zhang, P. A Survey on Cyber-Security of Connected and Autonomous Vehicles (CAVs). IEEE Trans. Intell. Transp. Syst. 2022, 23, 6240–6259. [Google Scholar] [CrossRef]
- Kumar, S.; Mann, K.S. Detection of Multiple Malicious Nodes Using Entropy for Mitigating the Effect of Denial of Service Attack in VANETs. In Proceedings of the 2018 4th International Conference on Computing Sciences (ICCS), Jalandhar, India, 30–31 August 2018; pp. 72–79. [Google Scholar]
- Merco, R.; Biron, Z.A.; Pisu, P. Replay Attack Detection in a Platoon of Connected Vehicles with Cooperative Adaptive Cruise Control. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 5582–5587. [Google Scholar]
- Appathurai, A.; Manogaran, G.; Chilamkurti, N. Trusted FPGA-based Transport Traffic Inject, Impersonate (I2) Attacks Beaconing in the Internet of Vehicles. IET Netw. 2019, 8, 169–178. [Google Scholar] [CrossRef]
- Kang, T.U.; Song, H.M.; Jeong, S.; Kim, H.K. Automated Reverse Engineering and Attack for CAN Using OBD-II. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–7. [Google Scholar]
- Alam, F.; Mehmood, R.; Katib, I.; Altowaijri, S.M.; Albeshri, A. TAAWUN: A Decision Fusion and Feature Specific Road Detection Approach for Connected Autonomous Vehicles. Mob. Netw. Appl. 2023, 28, 636–652. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, Z.; Xiong, H.; Xu, W. Privacy-Preserving Data Aggregation Protocol for Fog Computing-Assisted Vehicle-to-Infrastructure Scenario. Secur. Commun. Netw. 2018, 2018, 1378583. [Google Scholar] [CrossRef]
- Kim, Y.; Nam, J.; Park, T.; Scott-Hayward, S.; Shin, S. SODA: A Software-Defined Security Framework for IoT Environments. Comput. Netw. 2019, 163, 106889. [Google Scholar] [CrossRef]
- Turesson, H.K.; Kim, H.; Laskowski, M.; Roatis, A. Privacy Preserving Data Mining as Proof of Useful Work. In Research Anthology on Convergence of Blockchain, Internet of Things, and Security; IGI Global: Hershey, PA, USA, 2022; pp. 402–420. [Google Scholar]
- Foster, I.; Prudhomme, A.; Koscher, K.; Savage, S. Fast and Vulnerable: A Story of Telematic Failures. In Proceedings of the 9th USENIX Workshop Offensive Technologies, WOOT 2015, Washington, DC, USA, 10–11 August 2015. [Google Scholar]
- Sheehan, B.; Murphy, F.; Mullins, M.; Ryan, C. Connected and Autonomous Vehicles: A Cyber-Risk Classification Framework. Transp. Res. Part A Policy Pract. 2019, 124, 523–536. [Google Scholar] [CrossRef]
- Chan, P.P.K.; He, Z.-M.; Li, H.; Hsu, C.-C. Data Sanitization against Adversarial Label Contamination Based on Data Complexity. Int. J. Mach. Learn. Cybern. 2018, 9, 1039–1052. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, X.; Yu, J.; Fu, C. Query Privacy Preserving for Data Aggregation in Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2020, 2020, 9754973. [Google Scholar] [CrossRef]
- Dong, C.; Wang, H.; Ni, D.; Liu, Y.; Chen, Q. Impact Evaluation of Cyber-Attacks on Traffic Flow of Connected and Automated Vehicles. IEEE Access 2020, 8, 86824–86835. [Google Scholar] [CrossRef]
- Le, A.; Maple, C.; Watson, T. A Profile-Driven Dynamic Risk Assessment Framework for Connected and Autonomous Vehicles. In Proceedings of the Living in the Internet of Things: Cybersecurity of the IoT—2018, London, UK, 28–29 March 2018. [Google Scholar]
- Gligor, D.; Bozkurt, S. FsQCA versus Regression: The Context of Customer Engagement. J. Retail. Consum. Serv. 2020, 52, 101929. [Google Scholar] [CrossRef]
- Kraus, S.; Ribeiro-Soriano, D.; Schüssler, M. Fuzzy-Set Qualitative Comparative Analysis (FsQCA) in Entrepreneurship and Innovation Research—The Rise of a Method. Int. Entrep. Manag. J. 2018, 14, 15–33. [Google Scholar] [CrossRef]
- Li, Y.; Tu, Y.; Fan, Q.; Dong, C.; Wang, W. Influence of Cyber-Attacks on Longitudinal Safety of Connected and Automated Vehicles. Accid. Anal. Prev. 2018, 121, 148–156. [Google Scholar] [CrossRef]
- Zhao, C.; Gill, J.S.; Pisu, P.; Comert, G. Detection of False Data Injection Attack in Connected and Automated Vehicles via Cloud-Based Sandboxing. IEEE Trans. Intell. Transp. Syst. 2022, 23, 9078–9088. [Google Scholar] [CrossRef]




| Area | Attack No. | Security Attacks | Reference(s) |
|---|---|---|---|
| CAV sensor | P1 | Using multiple GPS receivers avoids blocking satellite signals from GPS. | [33] |
| P2 | Usage of redundant sensors on camera verification to avoid illusion and binding | [35] | |
| P3 | Jamming avoidance by making protective glasses around a LiDAR which acts as light filters | [36] | |
| Vehicle-to-everything network | P4 | Usage of fog server with fog anonymizer to avoid eavesdropping in vehicular ad-hoc networks (VANETs) | [20] |
| P5 | Maintaining data integrity in dynamic route guidance by forged data filtering scheme | [25] | |
| P6 | Using swarm algorithms for routing attacks | [37] | |
| P7 | Detecting bandwidth and entropy to reduce denial of service attack | [38] | |
| P8 | Implementing noisy control signals to avoid replay attacks | [39] | |
| P9 | Registering vehicles with TFD to avoid communication of attackers who are under victim identity | [40] | |
| In-vehicle network | P10 | Encryption and cryptographic checksum to avoid proximity vulnerabilities | [41] |
| P11 | Doing network segmentation to avoid CAN and SAE vulnerabilities | [41] | |
| P12 | Encryption and authentication to avoid flashing attacks | [42] | |
| P13 | Content filtering for integrated business service attacks | [28] | |
| Infrastructure | P14 | Usage of certificateless aggregate signcryption (CL-A-SC) scheme to monitor road surface conditions | [43] |
| P15 | Incorporating software-defined networking (SDN) in an IoT environment | [44] | |
| P16 | Using a cloud-based detection system for cloud infrastructure | [32] | |
| Data storage and data analysis | P17 | Conserving data mining to protect privacy leakage of user information | [45] |
| P18 | Using a telematics control unit (TCU) for remote control of vehicles | [46] | |
| P19 | Adopting CVSS (common vulnerability scoring system) to measure the severity of software vulnerabilities | [47] | |
| Machine learning system | P20 | Performing data sanitization and robust learning to defend against misleading in the learning process | [48] |
| P21 | Ensuring the privacy of data by privacy homomorphism | [49] | |
| P22 | Implementing neural networks for privacy assurance | [50] | |
| P23 | Assessing risks earlier using dynamic risk assessment | [51] | |
| Cybersecurity of CAV | P24 | Providing better solutions for security issues in connected and automated vehicles (CAV) | Expert opinion |
| P25 | Strengthening the cybersecurity patterns | Expert opinion | |
| P26 | Reduces attacker intentions in connected and automated vehicles | Expert opinion |
| Inclusion Criteria | Exclusion Criteria |
|---|---|
| Studies focusing on cybersecurity of connected and automated vehicles | Research article not in English |
| Studies analyzing the countermeasures for avoiding various security attacks | Proxy and repetitive work |
| Security attacks of CAV | Incomplete data |
| Studies published between 2015 to 2022 | Proceeding papers, editorial materials, thesis |
| Features | Number of Articles | Percentage (%) | ||
|---|---|---|---|---|
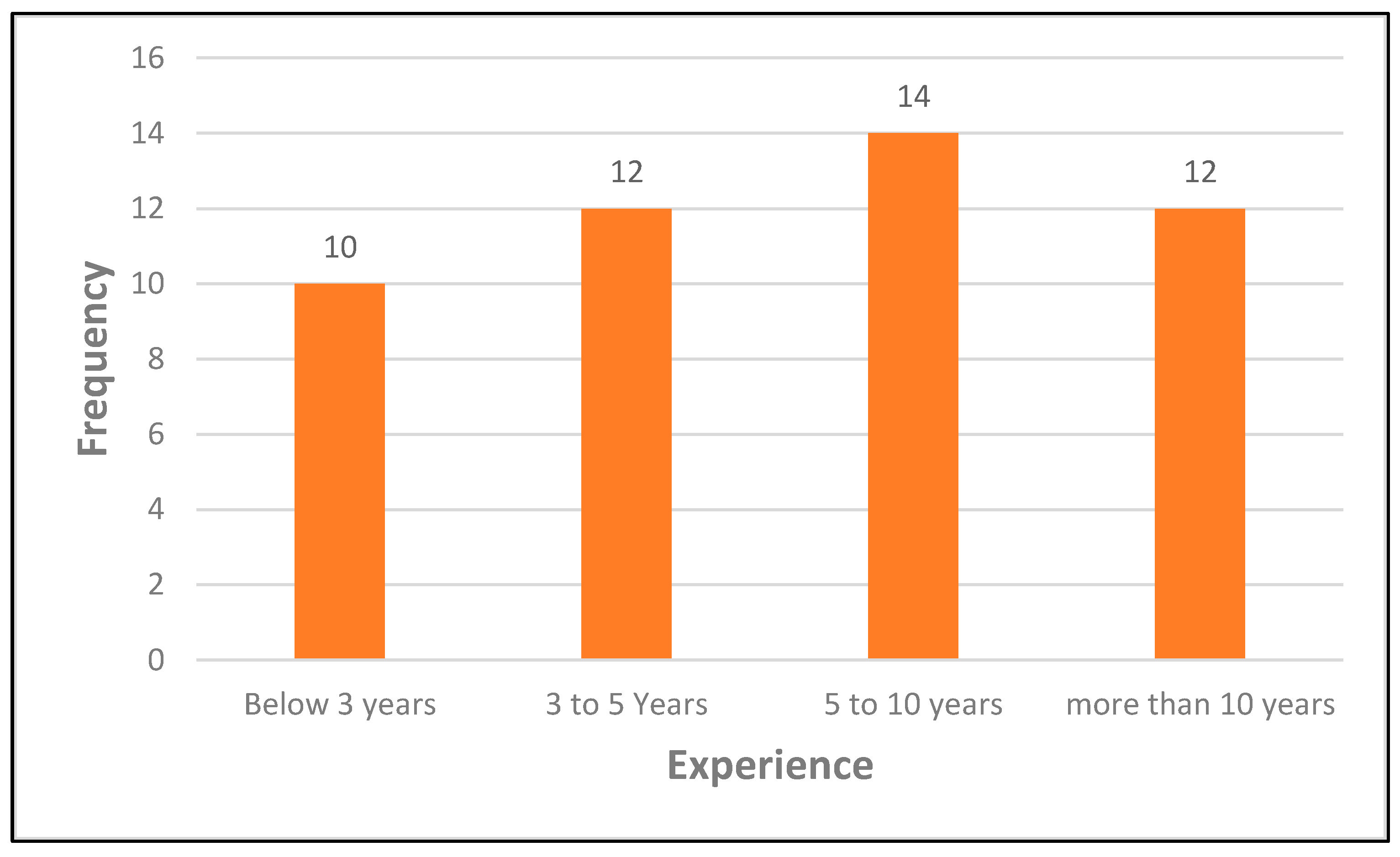
| Respondents (n = 48) | Experience | <3 years | 1 | 3 |
| 3–5 years | 1 | 3 | ||
| 5–10 years | 4 | 10 | ||
| >10 years | 3 | 7 | ||
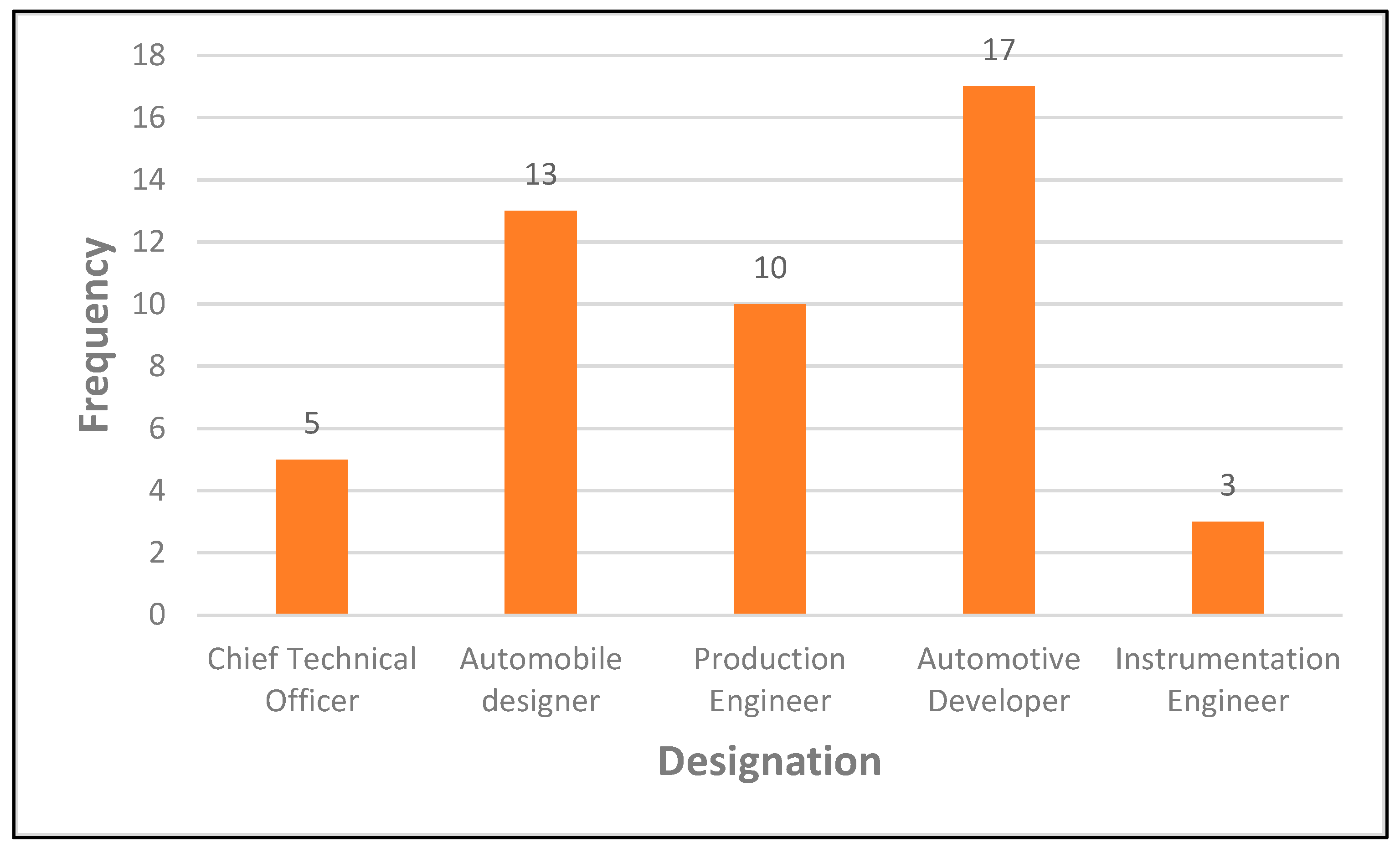
| Designation | Chief technical officer | 1 | 3 | |
| Automobile engineer | 3 | 7 | ||
| Production engineer | 3 | 7 | ||
| Automotive developer | 5 | 13 | ||
| Instrumentation engineer | 2 | 5 | ||
| Condition and Outcome | Abbreviation | Item Combinations | Description | Factor Analysis |
|---|---|---|---|---|
| Sensor assessment | SEA | P1 to P3 | Sensor security was assured by SE1 to SE3 statements | ICR = 0.847 |
| CR = 0.966424 | ||||
| AVE = 0.734851 | ||||
| Vehicle-to-everything network assessment | V2X | P4 to P8 | V2X security was assured by VE1 to VE6 statements | ICR = 0.909 |
| CR = 0.98801 | ||||
| AVE = 0.645291 | ||||
| In-vehicle network assessment | VNA | P9 to P12 | In-vehicle network security was assured by IV1 to IV4 statements | ICR = 0.893 |
| CR = 0.964828 | ||||
| AVE = 0.670849 | ||||
| Infrastructure assessment | ISA | P13 to P15 | Infrastructure security was assured by IS1 to IS3 statements | ICR = 0.870 |
| CR = 0.965346 | ||||
| AVE = 0.715194 | ||||
| Data Storage assessment | DSA | P16 to P18 | Data storage and analysis security was assured by DS1 to DS3 statements | ICR = 0.872 |
| CR = 0.969806 | ||||
| AVE = 0.761937 | ||||
| Machine learning Assessment | MLA | P19 to P22 | Machine learning system security was assured by ML1 to ML4 statements | ICR = 0.852 |
| CR = 0.968294 | ||||
| AVE = 0.663694 | ||||
| Cybersecurity | CSO | P23 to P25 | Defining better assurance for cybersecurity of CAV | ICR = 0.854 |
| CR = 0.958219 | ||||
| AVE = 0.728897 |
| Cybersecurity (CSO) | ~Cybersecurity (~CSO) | |||
|---|---|---|---|---|
| Conditions Tested | Consistency | Coverage | Consistency | Coverage |
| SEA | 0.858655 | 0.675531 | 0.853020 | 0.428687 |
| ~SEA | 0.273814 | 0.744661 | 0.354356 | 0.615599 |
| VXA | 0.461250 | 0.805496 | 0.316943 | 0.397453 |
| ~VXA | 0.693069 | 0.613664 | 0.824639 | 0.522975 |
| VNA | 0.376238 | 0.757388 | 0.429717 | 0.552577 |
| ~VNA | 0.777740 | 0.681017 | 0.811331 | 0.453812 |
| ISA | 0.445886 | 0.759302 | 0.470337 | 0.511628 |
| ~ISA | 0.713213 | 0.678247 | 0.778728 | 0.473652 |
| DSA | 0.669512 | 0.721487 | 0.665954 | 0.458425 |
| ~DSA | 0.497440 | 0.699808 | 0.595404 | 0.535063 |
| MLA | 0.701263 | 0.678112 | 0.789418 | 0.487620 |
| ~MLA | 0.470127 | 0.777527 | 0.478888 | 0.505959 |
| Combination of Constructs | SEA | VXA | VNA | ISA | DSA | MLS | Raw Coverage | Unique Coverage | Consistency |
|---|---|---|---|---|---|---|---|---|---|
| VXA*~VNA*~ISA*~DSA*~MLA |  |  |  |  |  | 0.224309 | 0.017412 | 0.816149 | |
| SEA*VXA*~VNA*~DSA*~MLA |  |  |  |  | 0.180608 | 0.033117 | 0.904274 | ||
| SEA*VXA*~VNA*~ISA*MLA |  |  |  |  |  | 0.237282 | 0.035165 | 0.929145 | |
| SEA*~VXA*~ISA*DSA*MLA |  |  |  |  |  | 0.361215 | 0.001707 | 0.796687 | |
| SEA*VXA*VNA*ISA*DSA |  |  |  |  |  | 0.21987 | 0.097302 | 0.975758 | |
| ~SEA*~VXA*VNA*~ISA*DSA*~MLA |  |  |  |  |  |  | 0.088426 | 0 | 0.806854 |
| ~SEA*~VXA*VNA*~ISA*~DSA*MLA |  |  |  |  |  |  | 0.121202 | 0.015705 | 0.851319 |
| SEA*~VXA*VNA*ISA*~DSA*MLA |  |  |  |  |  |  | 0.148173 | 0.0191191 | 0.898551 |
| SEA*~VXA*~VNA*~ISA*~MLA |  |  |  |  |  | 0.315466 | 0 | 0.829443 | |
| SEA*~VXA*~VNA*~ISA*DSA |  |  |  |  |  | 0.430864 | 0.00341403 | 0.833003 | |
| Solution coverage: 0.734039 | Solution consistency: 0.810098 | ||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karuppiah, K.; Sankaranarayanan, B.; Ali, S.M.; Priyanka, R. A fsQCA-Based Framework for Cybersecurity of Connected and Automated Vehicles: Implications for Sustainable Development Goals. Vehicles 2024, 6, 484-508. https://doi.org/10.3390/vehicles6010022
Karuppiah K, Sankaranarayanan B, Ali SM, Priyanka R. A fsQCA-Based Framework for Cybersecurity of Connected and Automated Vehicles: Implications for Sustainable Development Goals. Vehicles. 2024; 6(1):484-508. https://doi.org/10.3390/vehicles6010022
Chicago/Turabian StyleKaruppiah, Koppiahraj, Bathrinath Sankaranarayanan, Syed Mithun Ali, and Ramesh Priyanka. 2024. "A fsQCA-Based Framework for Cybersecurity of Connected and Automated Vehicles: Implications for Sustainable Development Goals" Vehicles 6, no. 1: 484-508. https://doi.org/10.3390/vehicles6010022
APA StyleKaruppiah, K., Sankaranarayanan, B., Ali, S. M., & Priyanka, R. (2024). A fsQCA-Based Framework for Cybersecurity of Connected and Automated Vehicles: Implications for Sustainable Development Goals. Vehicles, 6(1), 484-508. https://doi.org/10.3390/vehicles6010022