1. Introduction
Friction has long been an important issue in multibody dynamics. A detailed survey and comparison of several friction force models for dynamic analysis of multibody mechanical systems is provided in [
1]. Just as in the present work, the use of internal states defines the difference between dynamic and static friction models. It starts with different variations of the static Coulomb model, including viscous parts and the Stribeck effect, discusses several regularization approaches with finite slopes at zero velocity, and ends up with dynamic friction force models, including the probably best-known representative, the LuGre friction model.
Static friction models, where an appropriate regularization technique converts the stick inequality and the non-smooth stick–slip transition of Coulomb’s approach into a continuous and smooth function of the sliding velocity, are not able to maintain long-term stick. That is why commercial multibody software packages, like Adams, RecurDyn, and Simpack, also offer dynamic friction models. To reproduce stick–slip effects and maintain long-term stick, they rely on their own developments and do not simply use models known from the literature, e.g., [
1]. Just the LuGre model, as published in [
2], is implemented in the commercial software package Adams [
3]. However, as demonstrated in [
4], the LuGre approach does not appear to be an engineer’s first choice because it has too many drawbacks and is not able to reproduce a pre-defined friction characteristic in dynamic applications.
A second-order dynamic friction model (FrDyn2) was introduced in [
4] as a reference to the LuGre and to a standard static friction model. The FrDyn2 model produced accurate and reliable results in standard stick–slip examples as well as in a more practical model of a festoon cable system.
The present paper compares this model to commercial stick–slip models as as presented and analyzed in [
5]. It turns out that the concepts of Adams and Recurdyn are rather similar but different from the Simpack stick–slip model. That is why just the Adams and the Simpack stick–slip models are used here for the comparison with the FrDyn2 model.
Section 2 illustrates a typical standard and the shifted regularization technique and provides a short description of the FrDyn2 model, as defined in [
4].
Section 3 demonstrates the long-term stick potential of the FrDyn2 model, achieved by an appropriate shift in the standard regularization. It also illustrates the poor performance of a static friction model which approximates stick by slow sliding. A virtual friction test-bench was set up in Matlab for that purpose.
Section 4 compares the break-away and stick–slip transition of the FrDyn2 model with the stick–slip models of Adams and Simpack. For that purpose, the virtual friction test-bench was also set up in Adams and Simpack. The focus of
Section 5 is on the dynamic response to step-like force excitations with different durations and a force amplitude close to the adhesion limit.
Section 6 analyzes the performance of the friction models under consideration by the more practical model of a festoon cable system, with a setup in Matlab, Adams, and Simpack.
Section 7 summarizes and discusses the results and and provides an outlook for future research.
Finally,
Appendix A contains a Matlab script and the corresponding Matlab functions describing the virtual friction test-bench operated with the FrDyn2 model.
2. Static and Dynamic Friction Models
The idealized friction model of Coulomb simply distinguishes between sticking and sliding, as seen in
Figure 1a. The friction force
depends on the sliding velocity
v and is realized by combining an inequality with a simple relation
The friction force is proportional to the normal force and characterized by the parameters and , which specify the static and the dynamic coefficients of friction.
Coulomb’s dry friction approach, as defined in Equation (1), is practically unusable in general multibody dynamics due to the inequality representing stick. That is why dry friction is usually approximated by an unambiguous function, as seen in
Figure 1b. The regularized characteristic
introduces the fictitious velocity
, which defines the width of the regularization interval
and the dynamic velocity
that characterizes at
the range of full sliding, where the simple relation
applies. The transitions from the value pairs
and
as well as
, which are usually modeled by sufficiently smooth functions, like polynomials or trigonometric functions.
Static friction models are widely used in multibody dynamics and control theory. They are able to reproduce stick–slip effects in standard and in a more practical application [
4]. Even much simpler regularizations, assuming by
just one unique friction value, are in good conformity to dynamic measurements [
6]. However, static friction models cannot maintain long-term stick. They describe the friction force just as a function of the sliding velocity
.
Figure 1b defines a commonly used regularized friction characteristics
by a set of “static” (
) and “dynamic” (
) friction parameters. However, the use of dynamic friction parameters is no essential criteria for a dynamic friction model, as erroneously assumed in [
7]. Here, a static friction force defined by
making use of the dynamic friction value
is already supposed to define a dynamic friction force.
Dynamic friction models are characterized by the use of internal states. The friction force is then defined by a more complex function
, where
s collects the internal states. Dynamic friction models are able to reproduce stick–slip effects and maintain long-term stick [
8].
A software-capable formulation of a friction force model also takes the friction model parameters into account. Then, characterizes a static and a dynamic friction model, where p collects the friction model parameters.
The well-known LuGre friction model uses the displacement
z of a fictitious bristle as an internal state. However, as demonstrated in [
4], the LuGre approach represents just a first step approximation to the dynamics of a massless bristle, which results in several drawbacks of this dynamic friction model. If the mass of the fictitious bristle is also taken into account, this results in a second-order dynamic friction model (FrDyn2), which was introduced in [
4] as a reference. The FrDyn2 model exhibits none of the LuGre drawbacks and performed well in standard stick–slip examples and in a more practical model of a festoon cable system.
The second-order bristle dynamics is defined by
where
approximates the inertia force of the fictitious bristle,
describes the friction force,
models the bristle as a visco-elastic element, and
represents the component of the contact point velocity that is perpendicular to the contact normal. Just as with the LuGre model,
and
describe the stiffness and the damping of the fictitious bristle. The fictitious mass of the bristle is defined by
which represents the aperiodic case of the homogenous second-order differential Equation (2), thus avoiding unwanted oscillations in the fictitious bristle. The FrDyn2 model implies with
two internal states. It is provided as a Matlab function in
Appendix A by Listing A4.
The stick–slip models of Adams and RecurDyn describe the dynamic friction force just as a function of the contact point velocity
and approximate the static friction force by a two-dimensional function
, where
x is a fictitious displacement [
5]. A smooth function of the contact point velocity
, which is not explained in detail in the user manual, describes the transition from
to
. The fictitious displacement serves as an internal state and generates the static friction force
or the static friction coefficient
as a nonlinear function of
x by adding a viscous damping term.
Simpack provides a stick–slip model which realizes, like Coulomb’s approach in
Figure 1a, a sudden drop from the static
to the dynamic friction coefficient
[
5]. In the adhesion region, the friction force is approximated by a visco-elastic element whose deflection again represents an internal state of this stick–slip model.
3. Long-Term Stick of the Second-Order Dynamic Friction Model
By applying an appropriate horizontal shift to the regularized friction characteristics, as indicated in
Figure 1c, the second-order dynamic friction model can maintain long-term stick. The steady state solution (
and
) of the fictitious bristle dynamics (2) provides the required sticking force as
The FrDyn2 model describes here the transition from the static to the dynamic friction force
by a cubic polynomial and defines the friction force in the regularization range
by a parabolic function. Then,
delivers the corresponding horizontal shift. The static friction force is defined by
and
adjusts the horizontal shift to the sign of the required sticking force value.
Figure 2 provides a virtual test-bench which is used here to demonstrate the long-term sticking quality of the FrDyn2 model and in the following for a comparison to the stick–slip models of Adams and Simpack.
A body of unit mass
is in contact to a horizontal rough plate, as seen in
Figure 2a. It is exposed to a horizontal force
, which is continously increased in the interval
from
to the final value
, as defined by
Figure 2d. The friction parameters
,
and
,
, provided by
Figure 2c, model a regularized friction characteristic as defined in
Figure 1b. The FrDyn2 model uses the states
z and
of a fictitious bristle, where
denotes its fictitious mass and
and
characterize the visco-elastic properties of the bristle, as seen in
Figure 2b. The bristle parameters, as defined by
Figure 2c, are adjusted to the body and the friction parameters by estimating a reference friction force of
and defining a reference bristle deflection of
. Then,
provides the bristle stiffness. The reference friction force corresponds to a reference mass of
. It provides in a first guess the damping of the fictitious bristle as
, when the aperiodic case of a fictitious oscillator consisting of
,
, and
is assumed hereby.
The Matlab script, provided in
Appendix A by Listing A1, performs simulations with different step durations. It applies the standard implicit solver
ode15s where the default tolerances are changed to
RelTol = and
AbsTol = . The reference bristle deflection was chosen very small in this example. The Matlab function
dyn_fr_test_bench, provided in
Appendix A by Listing A2, computes the dynamics of the virtual friction test-bench including the FrDyn2 model as a set of first-order differential equations. The Matlab functions
Step3 and
FrDyn2, defined in
Appendix A by Listings A3 and A4, provide the step input and the dynamics of the FrDyn2 model. The simulation results, plotted in
Figure 3, demonstrate that the FrDyn2 model perfectly maintains long-term stick.
The excitation force is slowly increased in the time interval
from
to 99% of the static friction force
, which is given here by
. In the subsequent time interval
, the force
is kept constant. The friction force
, generated by the FrDyn2 model, counteracts the excitation force
, as seen in the upper-left plot in
Figure 3. It is worth noting that the friction force, as defined by the free-body diagram in
Figure 3b, points in the opposite direction of the contact point velocity. The tip of the bristle sticks to the ground because the excitation force does not exceed the static friction force. Then, the bristle deflection
z coincides with the body displacement
u and provides the friction force as a function of the bristle deflection
, as demonstrated by the lower-right plot in
Figure 3. As a consequence, the body shifts slightly and comes to a stand-still at the steady state value of
. The friction force diagram
, in the upper-right plot of
Figure 3, shows that the FrDyn2 model can reproduce the ambiguous part of Coulomb’s friction law at vanishing contact point velocities
.
A static friction model describes the friction force just as a function of the sliding velocity,
. A typical regularization without any horizontal shift is illustrated in
Figure 1. A static friction model can reproduce the required friction force
but definitely cannot maintain stick for longer time intervals, as seen in
Figure 4.
In the regularization range, the friction force characteristic
is described by a parabolic function. This pre-defined function, plotted in the right graph of
Figure 4 by a thin dashed line, perfectly coincides with the computed friction force
plotted by a solid thick line. The parabola delivers the required steady state friction force of
at the velocity of
. As a consequence, the body does not come to rest but continues to move inexorably at this velocity.
4. Break-Away and Stick–Slip Transition
The virtual friction test-bench, defined in
Figure 2, consists of a body in contact to a horizontal rough plate. The excitation force
is now slowly increased within
from
to the final value
, which exceeds the adhesion limit of
by 5%. The excitation force
, modeled by a third-order polynomial, reaches the adhesion limit
at time
.
The simulation results are plotted in
Figure 5. The dashed blue line, the solid black line, and the dotted red line represent the results computed with the FrDyn2 model, the Adams stick–slip model, and the Simpack stick–slip model.
At first (
), the body remains in a quasi-static equilibrium, where the slowly increasing excitation force
is perfectly counteracted by a friction force
generated by each of the friction models, as demonstrated in
Figure 5a, where the lines for
and
perfectly coincide in the time interval
. In general, the friction models under consideration generate friction forces depending not only on the contact velocity but also on internal states. The FrDyn2 model uses the displacement
z of a fictitious bristle and its time derivative
as internal states
. In the quasi-static equilibrium mode, the velocity of the body and the time derivative of the bristle deflection are negligibly small
and
. In this mode, the tip of the fictitious bristle sticks to the ground, which results in a bristle deflection that equals the body displacement
. The compliance of the fictitious bristle is modeled by a viscous force element,
. In the quasi-static equilibrium mode, the body acceleration
is negligibly small too, as indicated in
Figure 5b by the time history
in the time interval
. According to Equation (2), the friction force generated by the FrDyn2 model corresponds then to the elastic part of the bristle force,
. The quasi-static force
equals the static friction force
at the reference displacement of
The adhesion range is characterized by a vanishing sliding velocity (
) and extends here to displacements in the range of
. In this range, the friction force is generated as a function of the displacement, where the FrDyn2 model and the stick–slip model of Simpack apply a linear and the stick–slip model of Adams a nonlinear digressive function, as seen in
Figure 5f. The Adams manual does not specify the type of nonlinearity but, as indicated by the solid black line in
Figure 5f, it approaches the limit value
at the reference displacement
defined in (6) with a vanishing inclination.
The stick–slip model of Simpack is based on Coulomb’s approach, where the friction force drops in an instant from the static to the dynamic value as soon as the excitation force exceeds the static friction force at
, as seen in
Figure 5a,d in particular. The transition from the static to the dynamic friction force
are modeled in the FrDyn2 and the Adams stick–slip models as functions of the velocity
v controlled by the parameters
and
. The FrDyn2 model applies a cubic polynomial which is shifted in the horizontal direction to maintain stick at
, as indicated in
Figure 1. As can be seen by inspecting
Figure 5e, the FrDyn2 model generates a friction force characteristic (dashed blue line) which reproduces the pre-defined and horizontally shifted one (magenta colored circles) nearly perfectly. The friction characteristics produced by the Adams stick–slip model is rather similar (solid black line). Most likely, Adams models the transition
by a fifth-order polynomial. As a consequence, the FrDyn2 and the Adams stick–slip models produce slightly more delayed drops in the time histories of the computed friction forces, as seen in
Figure 5d.
Figure 5b,c illustrate the break-away effect at
by the time histories of the body acceleration
and the body displacement
. All friction models under consideration approximate sliding at
by a constant friction force
. Viscous components in the friction force are not considered here. The free body diagram in
Figure 2b delivers the linear momentum
for the body of mass
. At
which includes
, the applied force is defined by
and the friction force is represented by its dynamic value
. Then, the maximum acceleration of the body is defined by
which is exactly reproduced by the friction models, as seen in
Figure 5b.
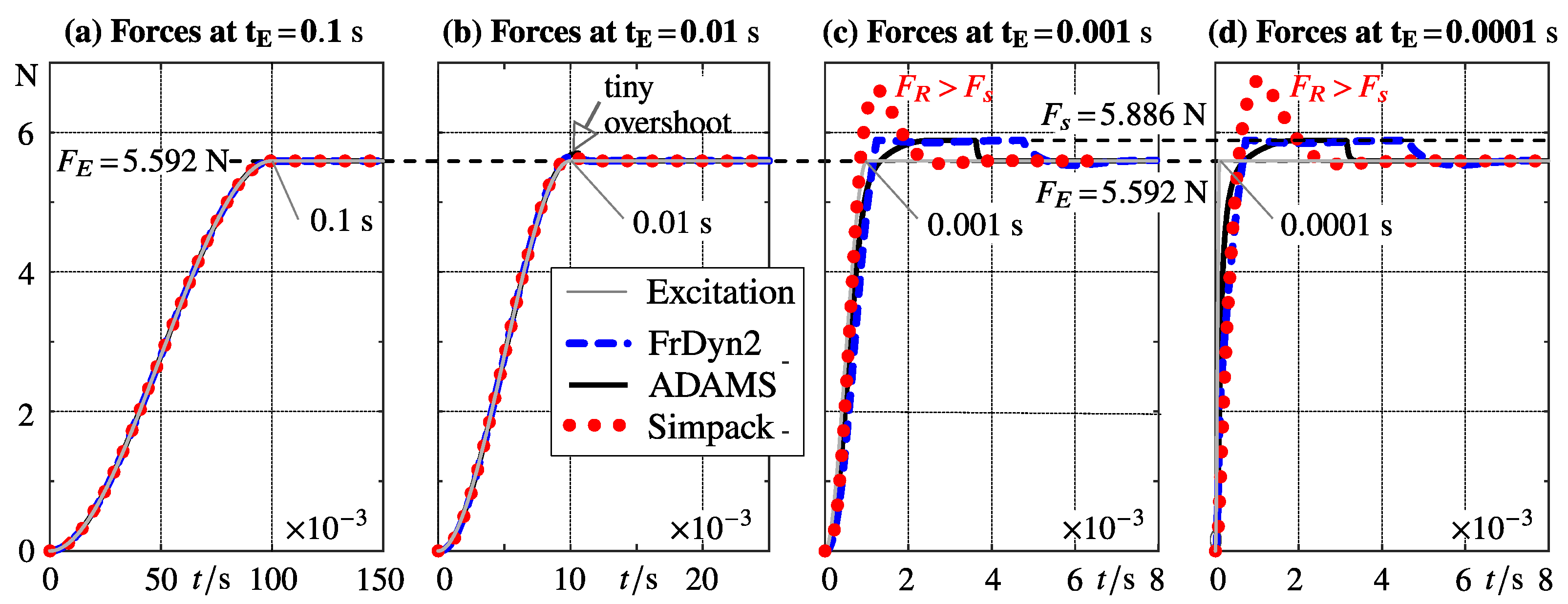
5. Dynamic Response
A pulse load excitation, performed in [
4], revealed the tendency of dynamic friction models to produce dynamic overshoots in the friction force time histories. That is why the virtual test-bench defined in
Figure 2 is now exposed to excitation forces where the amplitude
is 5% less than the static friction force
and the step duration is varied from
to
. The corresponding simulation results are shown in
Figure 6. The solid thin gray line represents the excitation force
, the dashed blue line, the solid black line, and the dotted red line mark the friction forces
computed with the FrDyn2, the Adams stick–slip, and the Simpack stick–slip models.
The time histories of the friction forces perfectly coincide with the excitation force
at a step duration of
, as seen in
Figure 6a. All friction models operate here in a quasi-static sticking mode where the friction forces are practically generated as a function of the body displacement, as already illustrated in
Figure 5e, and in this specific case by
Figure 7.
The forces
generated by the friction models depend here practically not on the velocity
but only on the displacement of the body
u, as seen in
Figure 7a,b. In case of the FrDyn2 and the Simpack stick–slip models
holds, which provides the friction force
at the steady state displacement
, as indicated in
Figure 7b,c by thin dashed black lines. Adams models the friction force a quasi-static sticking mode by a strongly nonlinear and degressive function of the displacement. The Adams manual does not specify this function but the simulation results provide the friction force
at the steady state displacement
, as seen in
Figure 7b,c. As expected from the time histories
plotted in
Figure 6a, the time histories of the body displacement reach their steady state values
and
at
without any overshoots, as seen in
Figure 7c.
In a quasi-static mode, the tip of the fictitious bristle, which forms the basis of the FrDyn2 model, sticks to the ground. Then, the linear momentum (7) of the body in the virtual friction test-bench simplifies to
where the quasi-static friction force is generated by the bristle compliance
and
holds in addition. The simplified equation of motion (9) is characterized by the eigen-frequency
and delivers the value and its corresponding oscillation period as
As a consequence, even a rather short step duration of
will still represent a subcritical excitation of the virtual friction test-bench. The time histories of the friction forces
exhibit just a small overshoot at
, as seen in
Figure 6b.
The situation becomes complicated for step durations
, as seen in
Figure 6c,d. The Simpack stick–slip model (dotted red line) generates now significant overshoots, which amount to
The values exceed the steady state value by % and % and even the static friction value by % and %, which calls into question the physical basis of this stick–slip model. The time histories of the friction forces generated by the FrDyn2 and the Adams stick–slip models (dashed blue and solid black lines) differ somehow. But both models limit the friction force to the static value , as expected from friction models in general.
The friction models now generate friction forces which strongly depend on the body velocity
and the body displacement
u, as seen in
Figure 8a,b.
The Simpack stick–slip model (dotted red line) generates a time history of the body displacement which approaches the quasi steady state value
with a small overshoot shortly after the step duration of
, as seen in
Figure 8c. The FrDyn2 model overshoots and partly slides, resulting in displacements at
which exceed with
the quasi steady state value of
significantly. Hence, the FrDyn2 model generates a dynamic break-away effect at high frequent excitation loads, which are close (here, 95%) to the static friction force. The time history of the body displacement
shows a strange behavior for the Adams stick–slip model, as exemplified by the solid black line in
Figure 8c. At first (
), it approaches the quasi steady state value
of the FrDyn2 and Simpack solution and then (
) it starts to decrease very slowly, but the simulated time interval
is too short to indicate a limit value.
A simulation with the Adams stick–slip model over a longer time period results in the time history of the body displacement
, as plotted in
Figure 9.
The section shown in
Figure 8c has a light gray background. It seems that Adams applies in its stick–slip model different time constants for the increase and decrease in the body displacement
. The force excitation with a step duration of
is much faster than the dynamics of the virtual friction test-bench. The body displacement reaches its maximum value at
, which corresponds to the oscillation period computed in (10). The decay from the maximum displacement to the steady state value takes about
, which is fourteen times as much. This strange behavior was also reported in [
5], wherein pulse loads are applied to a single mass resting on a horizontal plate. At the end of a series of impulse loads each of magnitude
, the body is returned to its initial position. However, in the present example, a small but permanent deviation of
remains, as seen in
Figure 9. This indicates that the Adams stick–slip model also tends to partly slip, when high frequent excitation loads close to the static friction force are applied.
6. The Festoon Cable System Model
A planar model of a festoon cable system is used in [
4] to asses different friction models in a more practical example. The model consists of three cable
and two trolley
masses, as seen in
Figure 10.
At the beginning
, the towing trolley is fixed at
. The equilibrium position of the cable system places the trolleys at
,
, and locates the cable masses at
,
,
, as well as
. The non-holonomic constraint
relates the movements of the towing trolley to a pre-defined velocity profile
. The velocity profile, defined by the solid gray lines in
Figure 11a, models an extension maneuver, which moves the towing trolley from the initial position
to a final position of
.
The Matlab simulation with the FrDyn2 model generates the output at every simulation step. It applies the Matlab standard solver for stiff differential equations ode15s with error tolerances of RelTol = and AbsTol = .
The Adams and Simpack simulations were performed with an output step size of . The dashed blue, the solid black, and the dotted red lines mark the results obtained by the FrDyn2, the Adams, and the Simpack stick–slip models.
The movement of the towing trolley ends at
. After that, the trolleys perform to and fro motions which at
are indicated by sign changes in the time histories of trolley velocities
and
. An arrow pointing from
over
down to
highlights such an event, in particular. The dynamic motions of the cable masses induce variations in the normal forces
and
acting between the trolleys and the rail, as seen in
Figure 11b. The time histories of the velocities
,
and the normal forces
,
generated with FrDyn2 and the stick–slip models of Adams and Simpack match nearly perfectly. However, the time histories of the friction forces
and
exhibit some discrepancies, as seen in
Figure 11c. In particular, when the trolley velocities change their signs or during a sticking period of trolley 2.
The plots in
Figure 12 focus on a sign change in the trolley velocity
at
and a sticking period of trolley 2 in the time interval
.
In the very short time interval
, the normal force between trolley 1 and the rail amounts to
, as indicated in
Figure 11b. The friction values defined in
Figure 10 provide in this case a static friction force of
and a dynamic friction force of
. At times
and
, the first trolley is in a full sliding mode, as indicated in
Figure 12a by the friction forces
and
. These sliding modes are perfectly reproduced by the friction models under consideration. Shortly before the sign change in the trolley velocity, the friction forces computed by the FrDyn2 and the Adams stick–slip model make use of the Stribeck effect, which models a velocity-dependent transition from the static to the dynamic friction force and vice versa. The Simpack stick–slip model approaches
with the dynamic force value and does not reproduce a potential velocity-dependent increase in the friction force. The FrDyn2 and the Simpack stick–slip models describe the friction force at
by a linear spring, whereas the Adams stick–slip model uses a nonlinear approach. That is why, the FrDyn2 model (dashed blue line) corresponds in the time interval
more to the Simpack (dotted red line) than to the Adams stick–slip model (solid black line). The friction forces of the FrDyn2 and the Adams stick–slip models are limited to the static value
, which results in
at
. However, The Simpack stick–slip model overshoots and produces the peak value of
, which exceeds by nearly 60% the static friction force
or
, respectively.
The sticking period
is represented rather similarly by the friction models under consideration, as seen in
Figure 12b. Again, the FrDyn2 and the Adams stick–slip models increase the friction forces from the dynamic to the static value when approaching stand-still at
. However, the small time delay of the peak values visible in
Figure 12a is not noticeable due to the large time interval applied in this plot. The Simpack stick–slip model is based on Coulomb’s approach, which results in the discontinuities at the slip–stick and stick–slip transitions in the dotted red line.
7. Discussion
The present manuscript compares a second-order dynamic friction (FrDyn2) model with the commercial stick–slip models of Adams and Simpack. The comparison is performed here with a virtual friction test-bench and a more practical model of a festoon cable system.
All models can maintain long-term stick. The FrDyn2 model corresponds partly to the Adams and partly to the Simpack stick–slip models. The FrDyn2 and the Adams stick–slip models show dynamic break-away effects at high frequent excitation loads, which are close (here 95%) to the static friction force. The Simpack stick–slip model avoids dynamic break-away effects by overshoots in the friction force that far exceed the static friction force. Adams models the decay of a friction force overshoot much slower than the increase, whereas the FrDyn2 model considers in both cases the dynamics of the fictitious bristle.
The FrDyn2 model is based on a fictitious bristle characterized by its mass, stiffness, and damping. The fictitious mass of the bristle is automatically adjusted to the stiffness and damping parameters. The pre-defined friction force characteristic is described here by piecewise-defined polynomials but not limited to this. The bristle parameters can easily be derived from estimated reference friction forces and estimated bristle deflections.
The results obtained by the FrDyn2 model are reliable and based on the physical nature of the friction model approach, which makes the second order dynamic friction model a suitable alternative to commercial stick–slip models.
The dynamics of the FrDyn2 model are governed by the friction characteristics. A rapid transition from the static to the dynamic force, modeling the Stribeck effect, results in a stiff performance of the FrDyn2 model. But the shifted regularized friction characteristic is completely continuous and smooth, which makes it possible to apply any standard stiff ode solver for a multibody system which incorporates the FrDyn model.
Future works will implement the FrDyn2 model as an external force element in Adams and Simpack. Then, the run-time performance of this model can also be compared to the corresponding commercial stick–slip models. The influence of the velocities and , which model the regularization and the Stribeck effect on the results and on the run-time performance, will be studied in addition.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















