
Integrated Modeling of Coastal Processes Driven by an Advanced Mild Slope Wave Model


Abstract
:1. Introduction
2. Mathematical Background of the Implemented Models
2.1. The Hyperbolic Mild Slope Wave Propagation Model (HMS)
2.2. The Hydrodynamic Model (HYD)
2.3. The Sediment Transport and Sedimentation/Erosion Model (SDT)
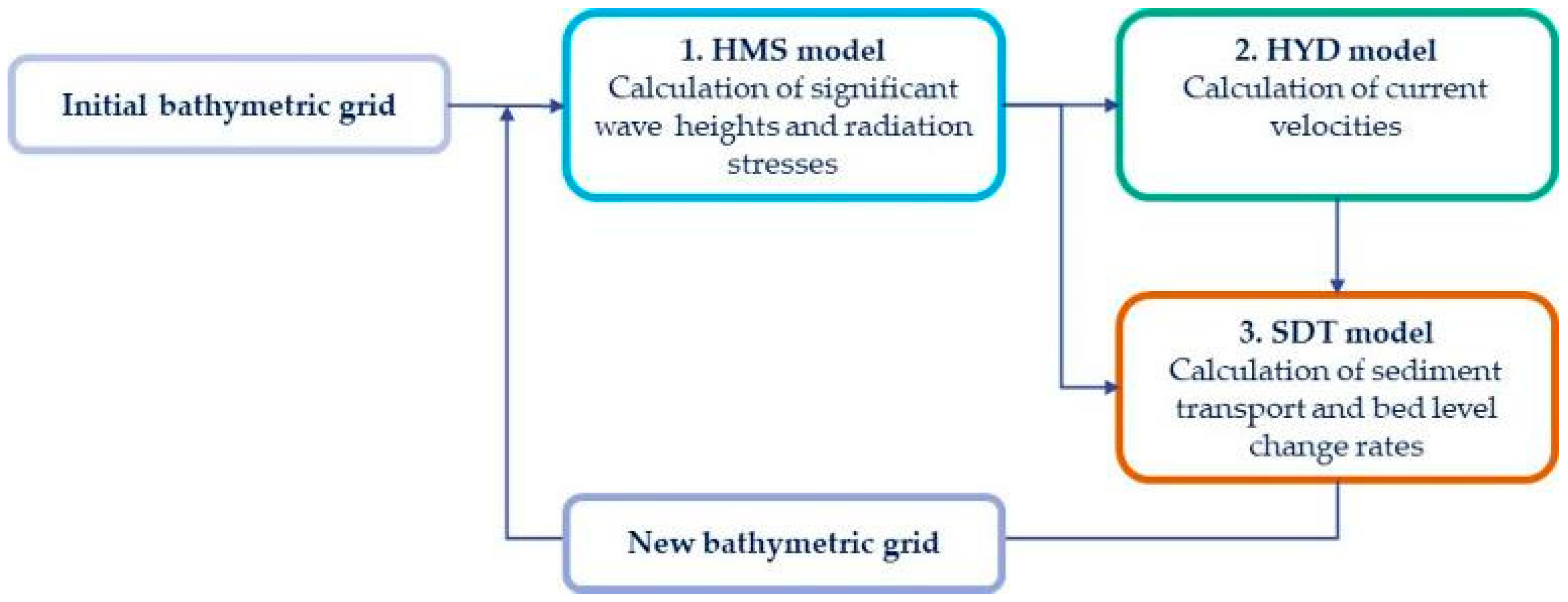
2.4. Implementation Sequence of Numerical Models
3. Validation of Individual Numerical Models
3.1. Validation of the Mild Slope Wave Model (HMS)
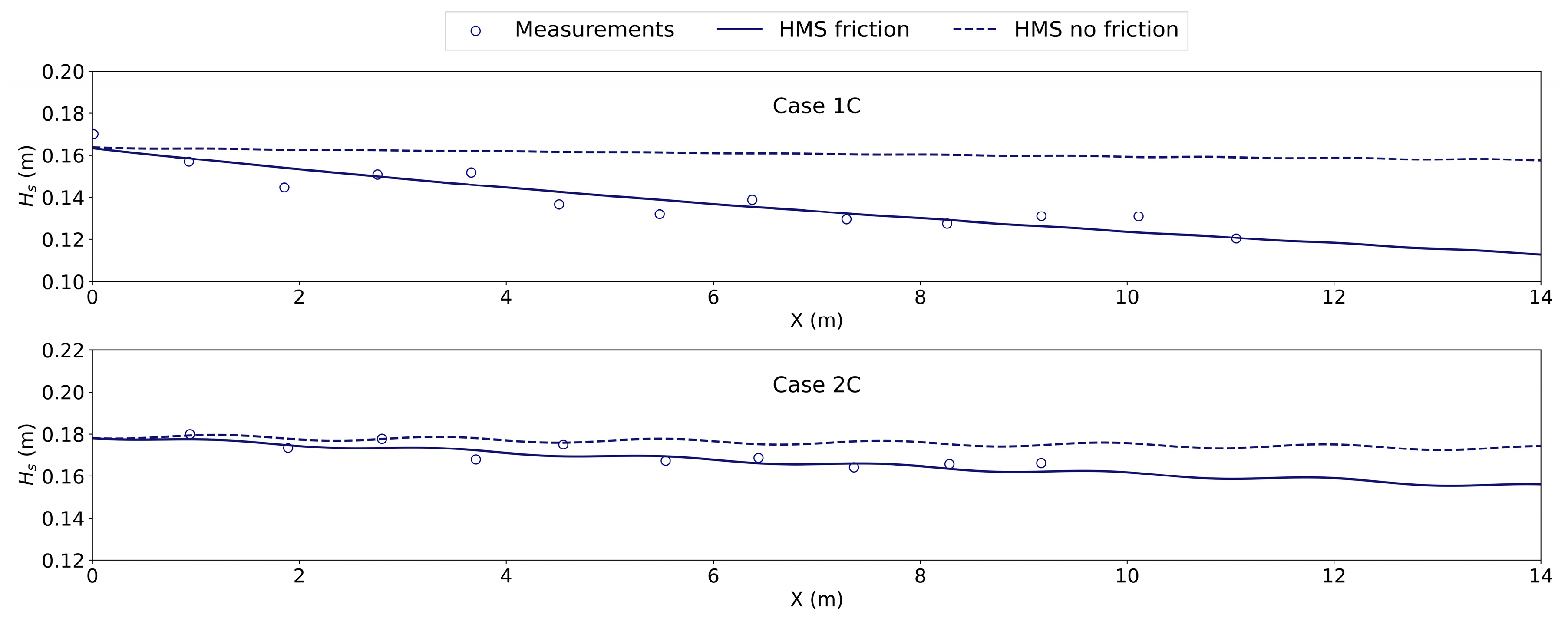
3.1.1. Energy Dissipation due to Bottom Friction on a Rippled Bed [66]
3.1.2. Wave Breaking of Irregular Unidirectional Waves over a Plane-Sloping Beach [67]
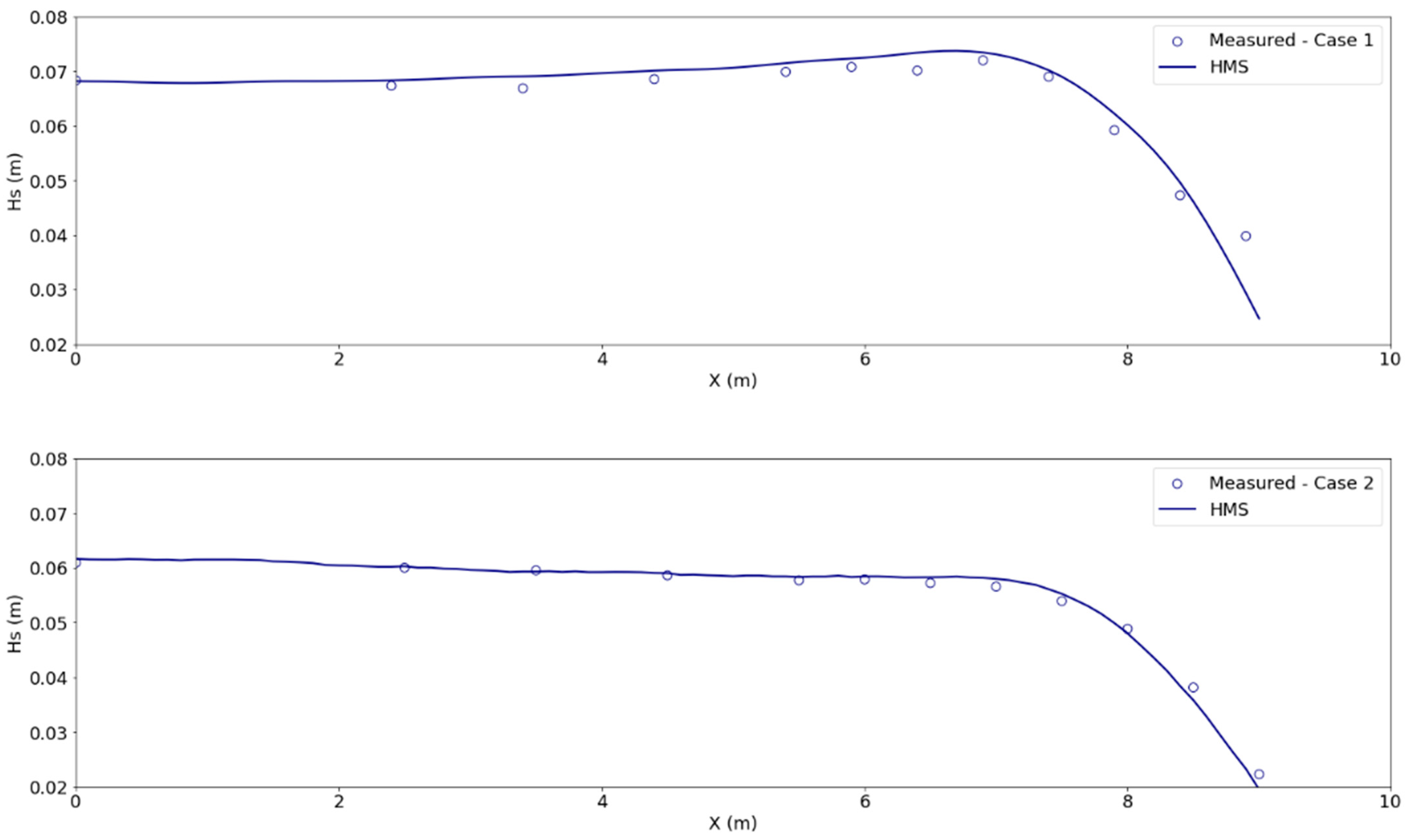
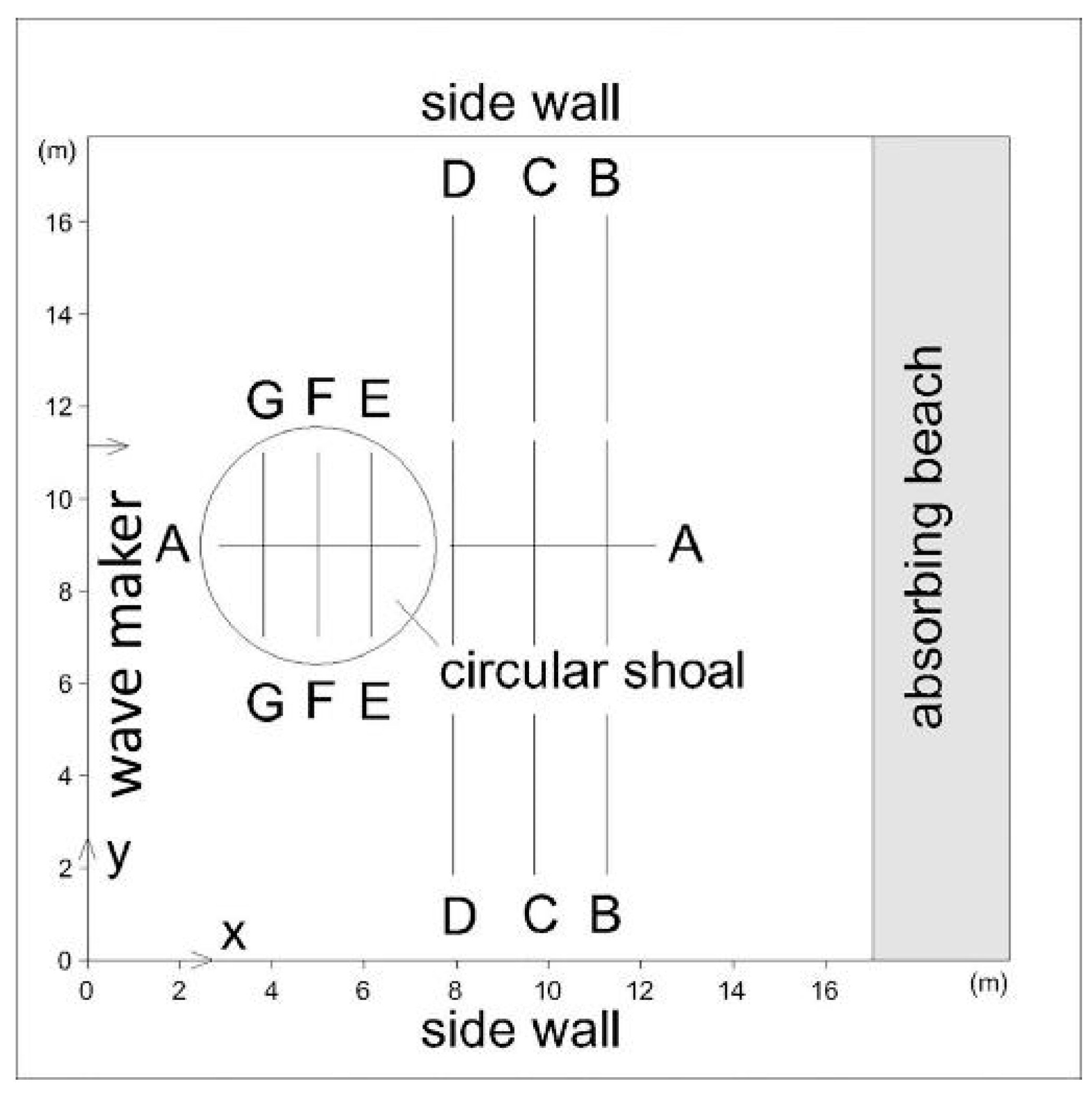
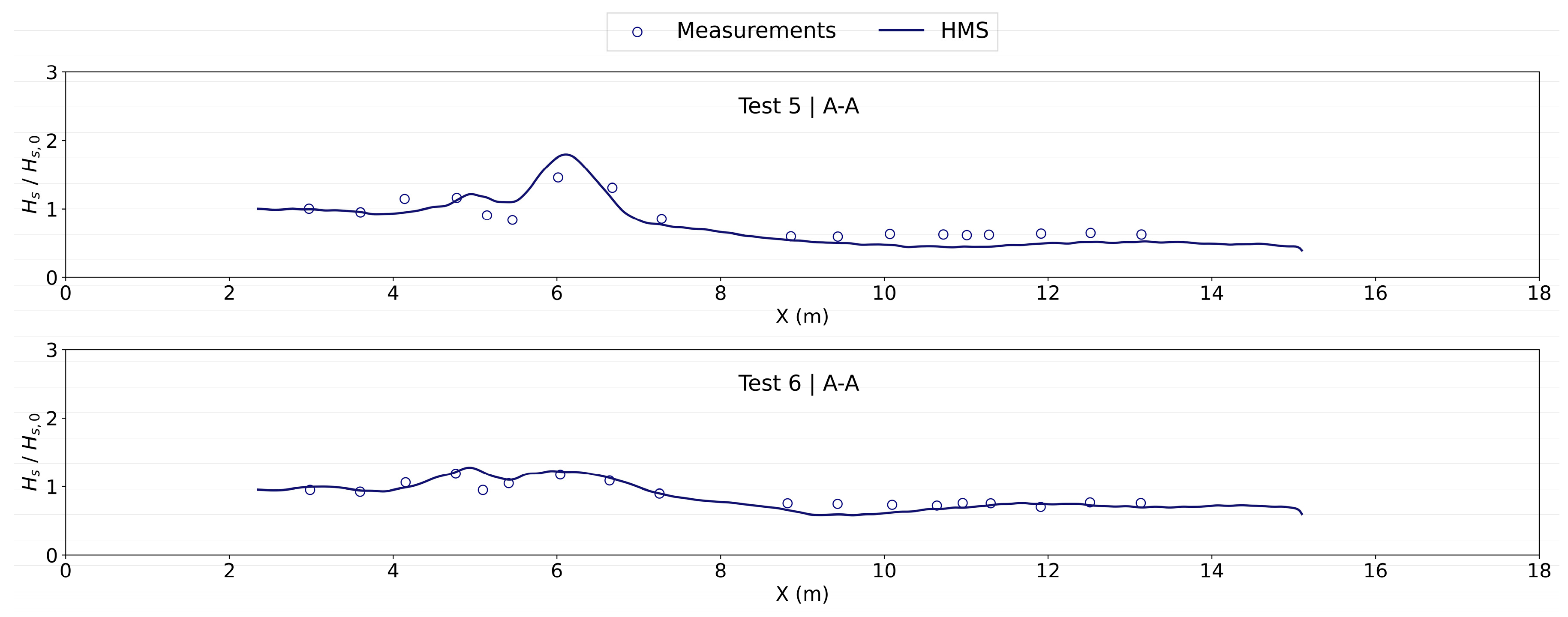
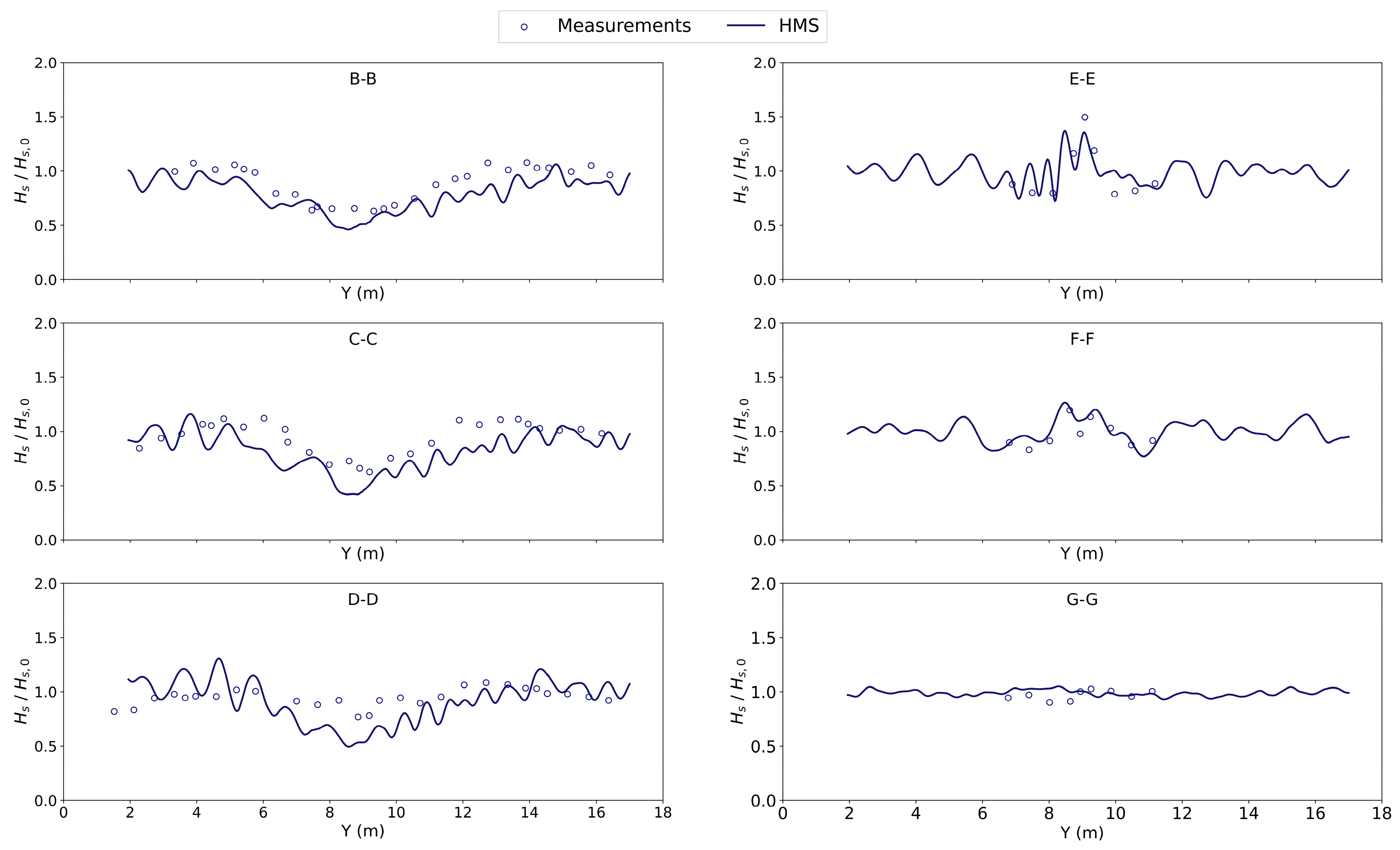
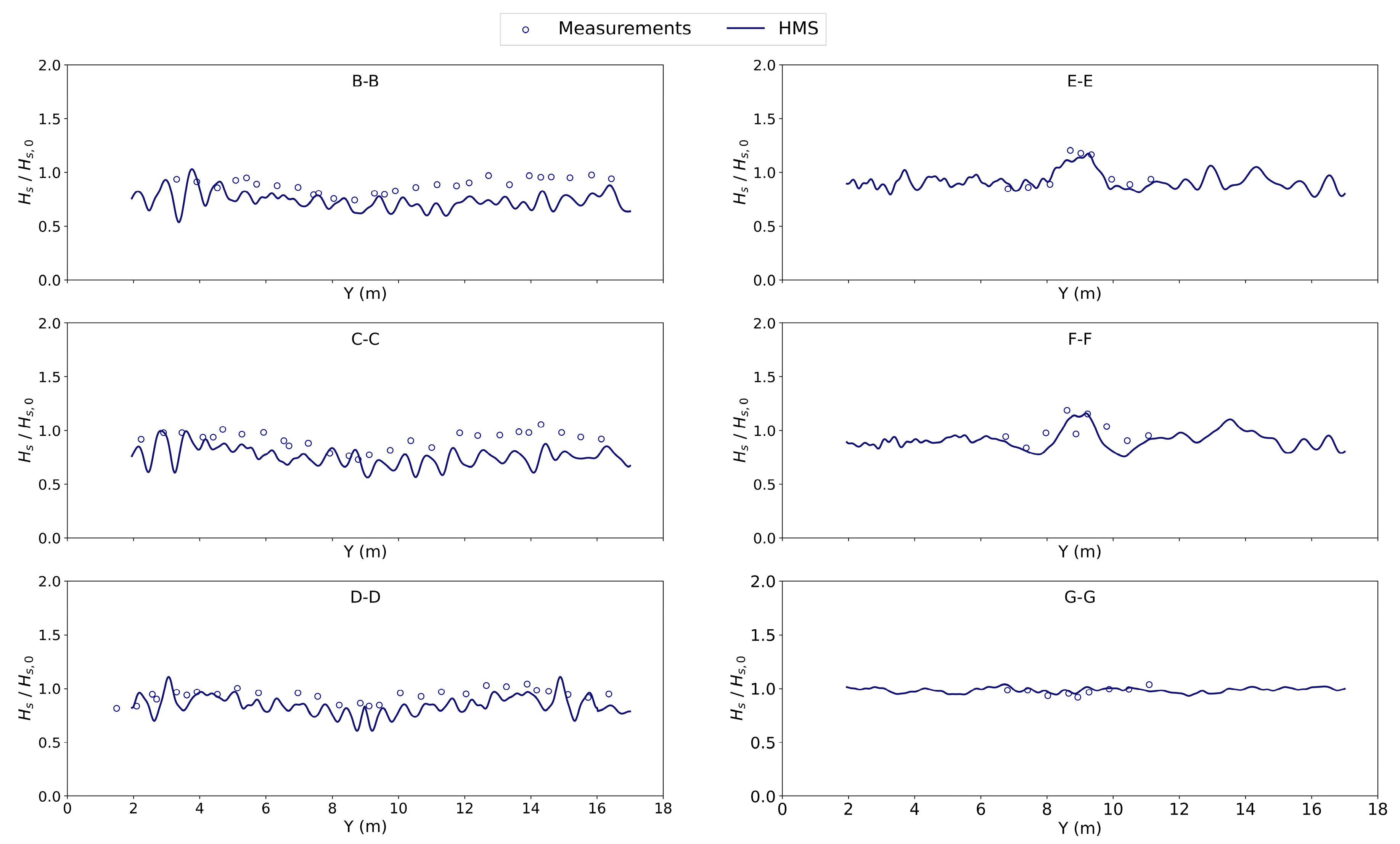
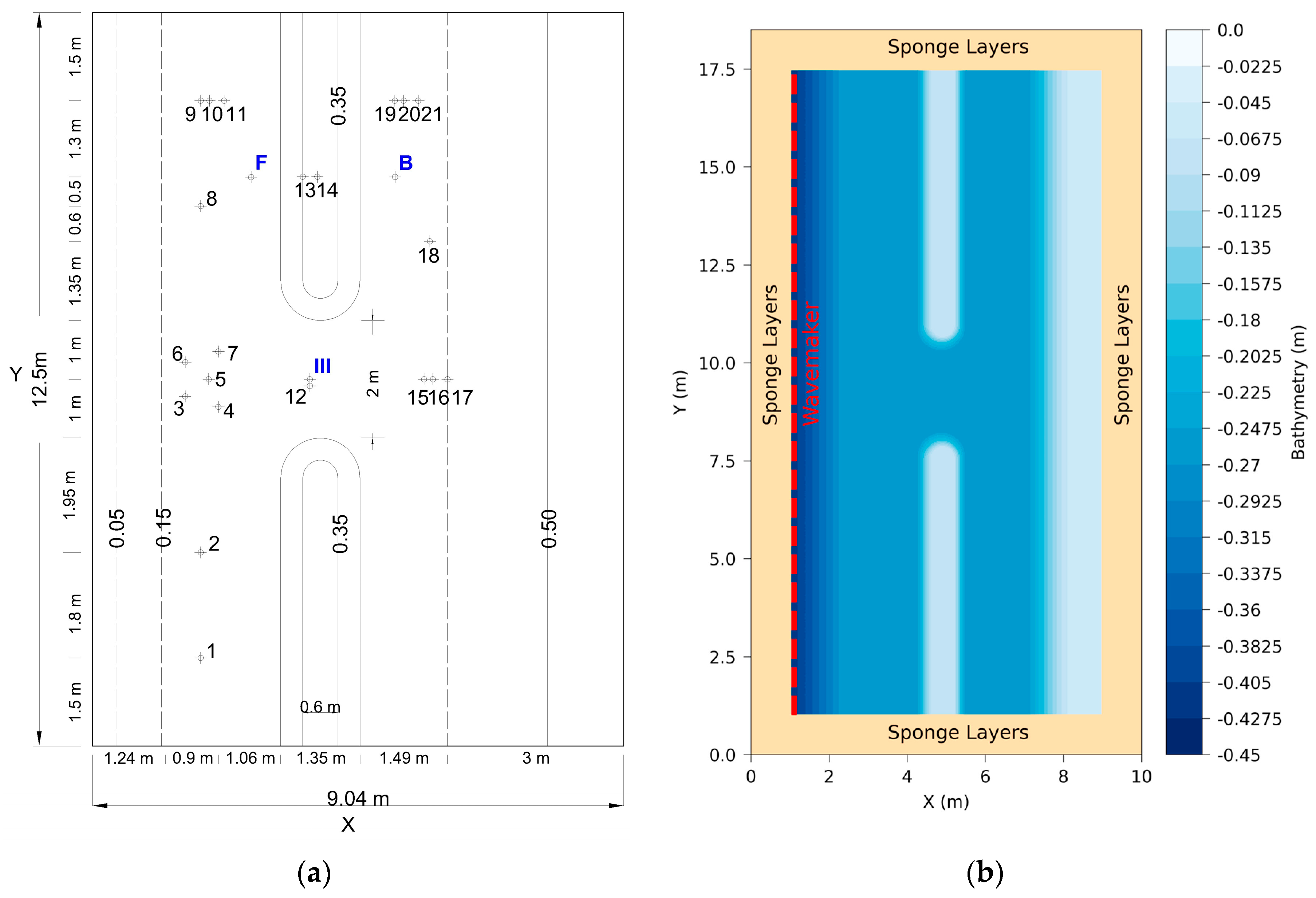
3.1.3. Wave Breaking of Irregular Multidirectional Waves over a Submerged Shoal [68]
3.2. Validation of the Hydrodynamic Model (HYD)
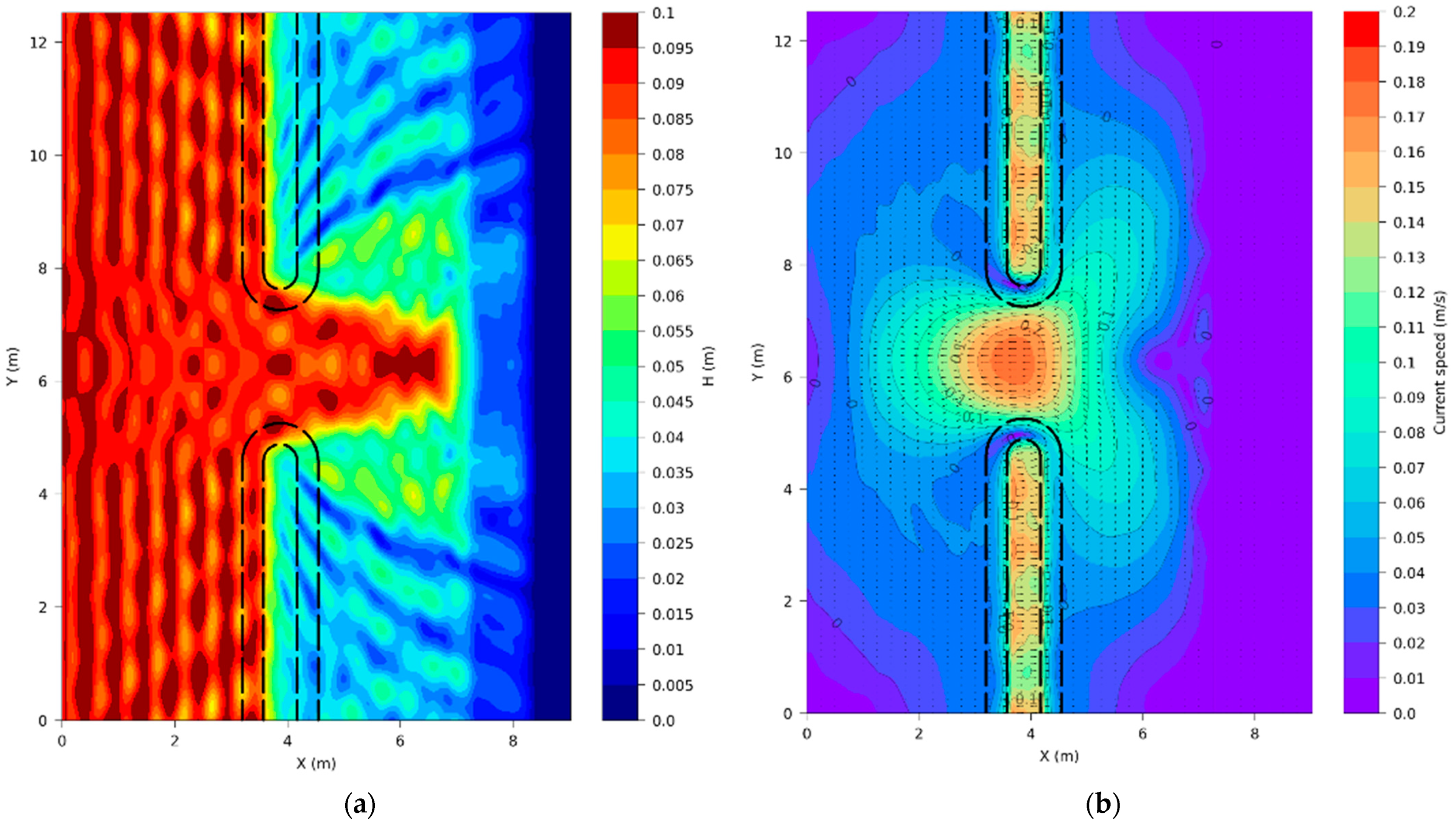
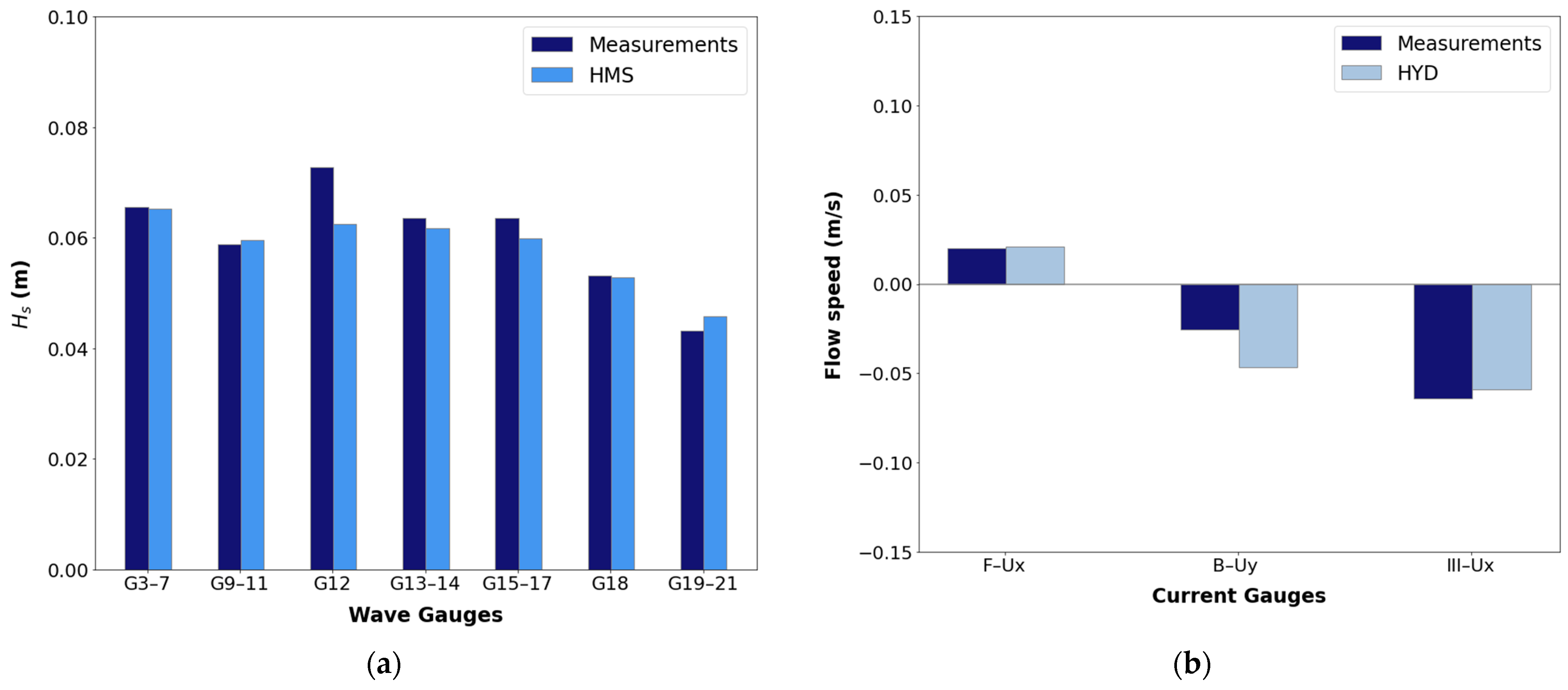
Hydrodynamic Conditions around Submerged Breakwaters [72]
3.3. Validation of the Sediment Transport Model (SDT)
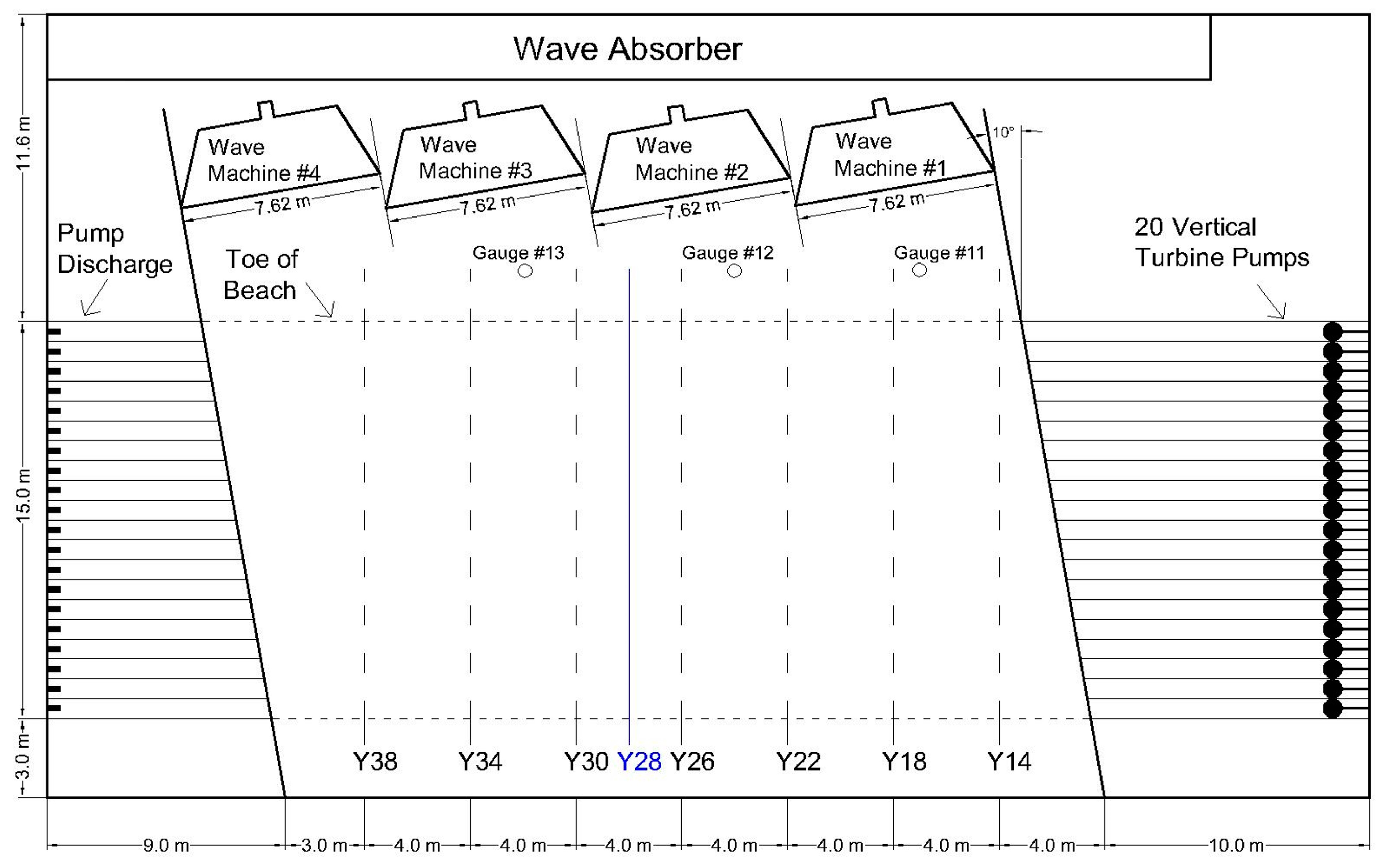
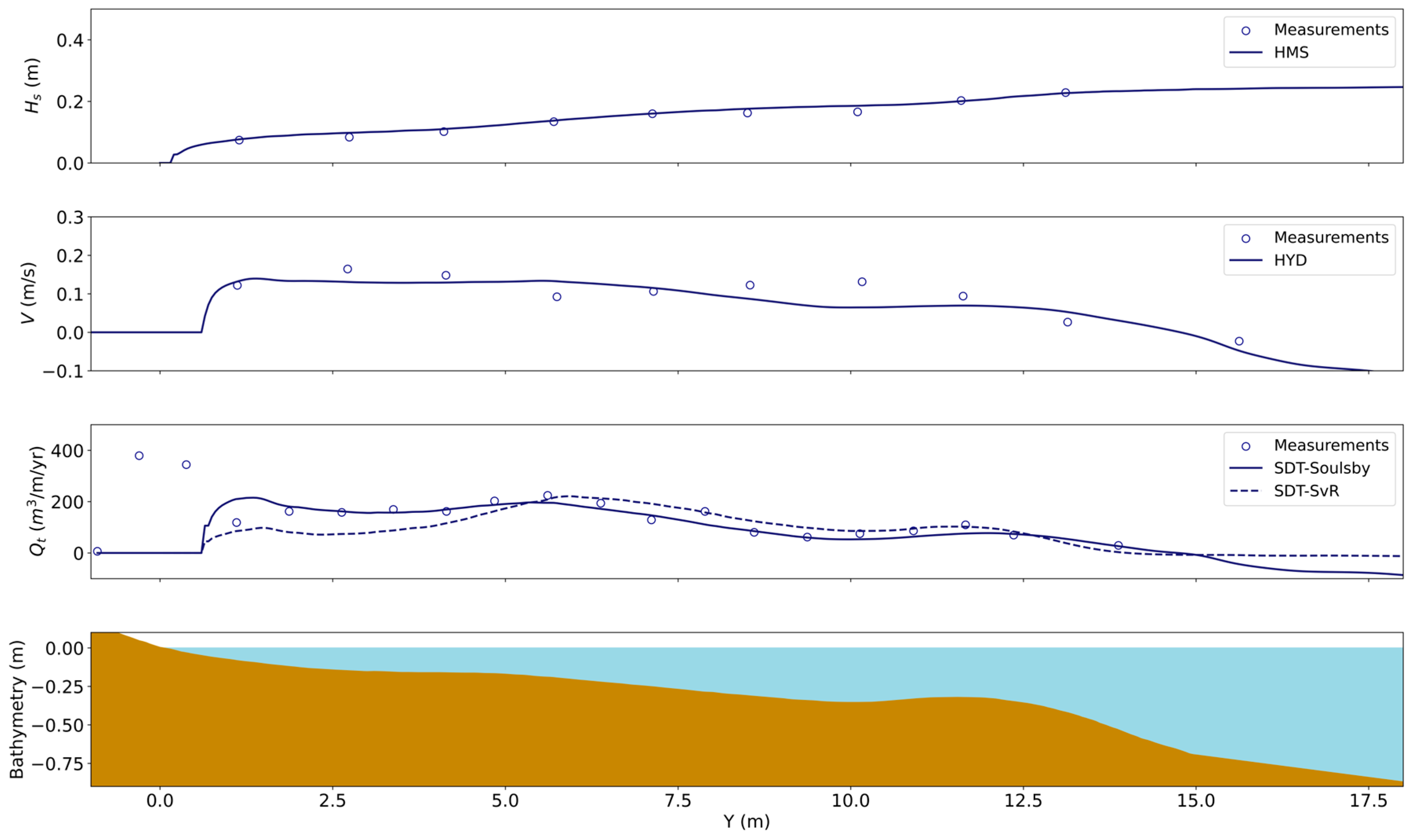
Longshore Currents and Sediment Transport in a Large-Scale Movable Bed Experiment [74]
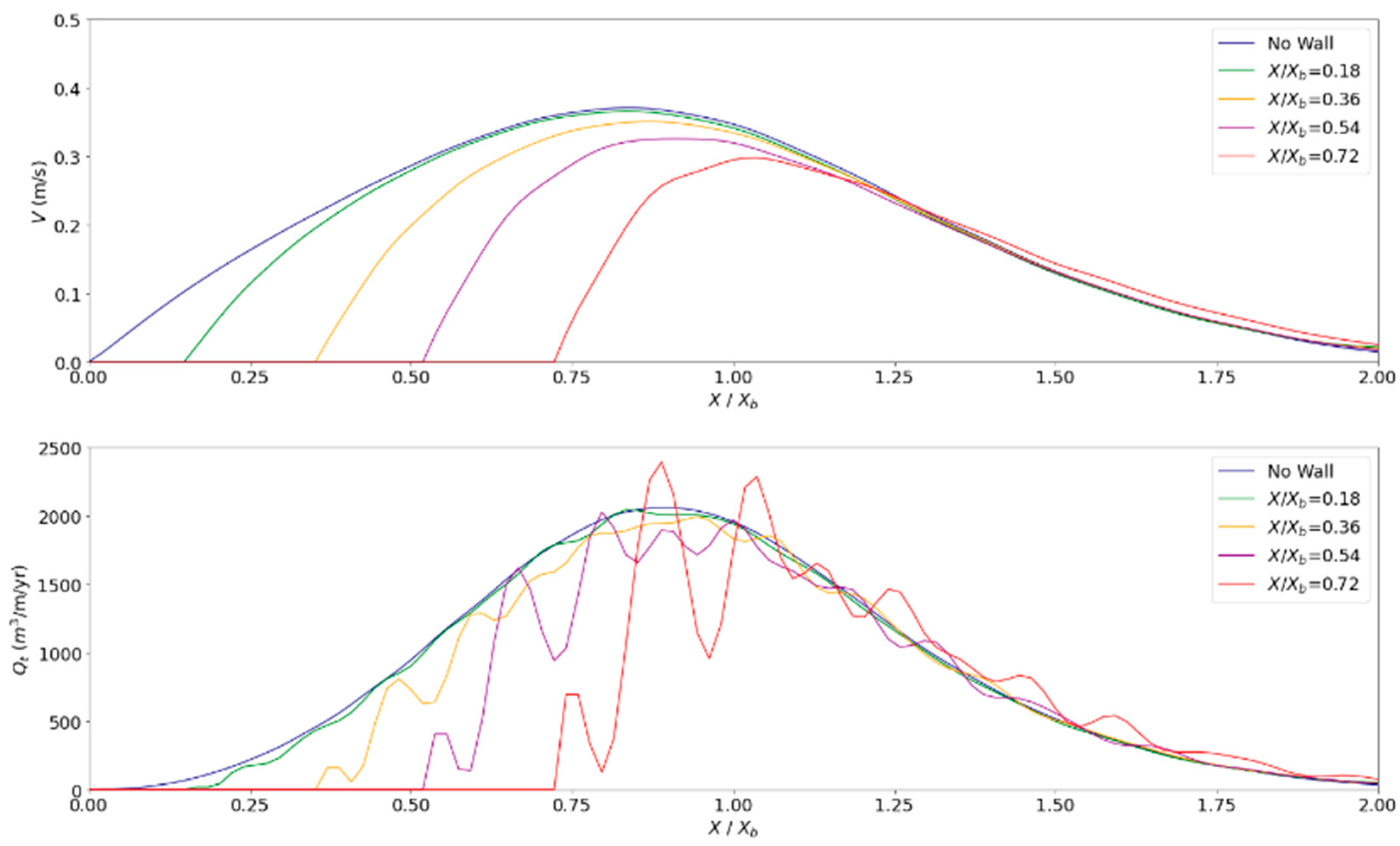
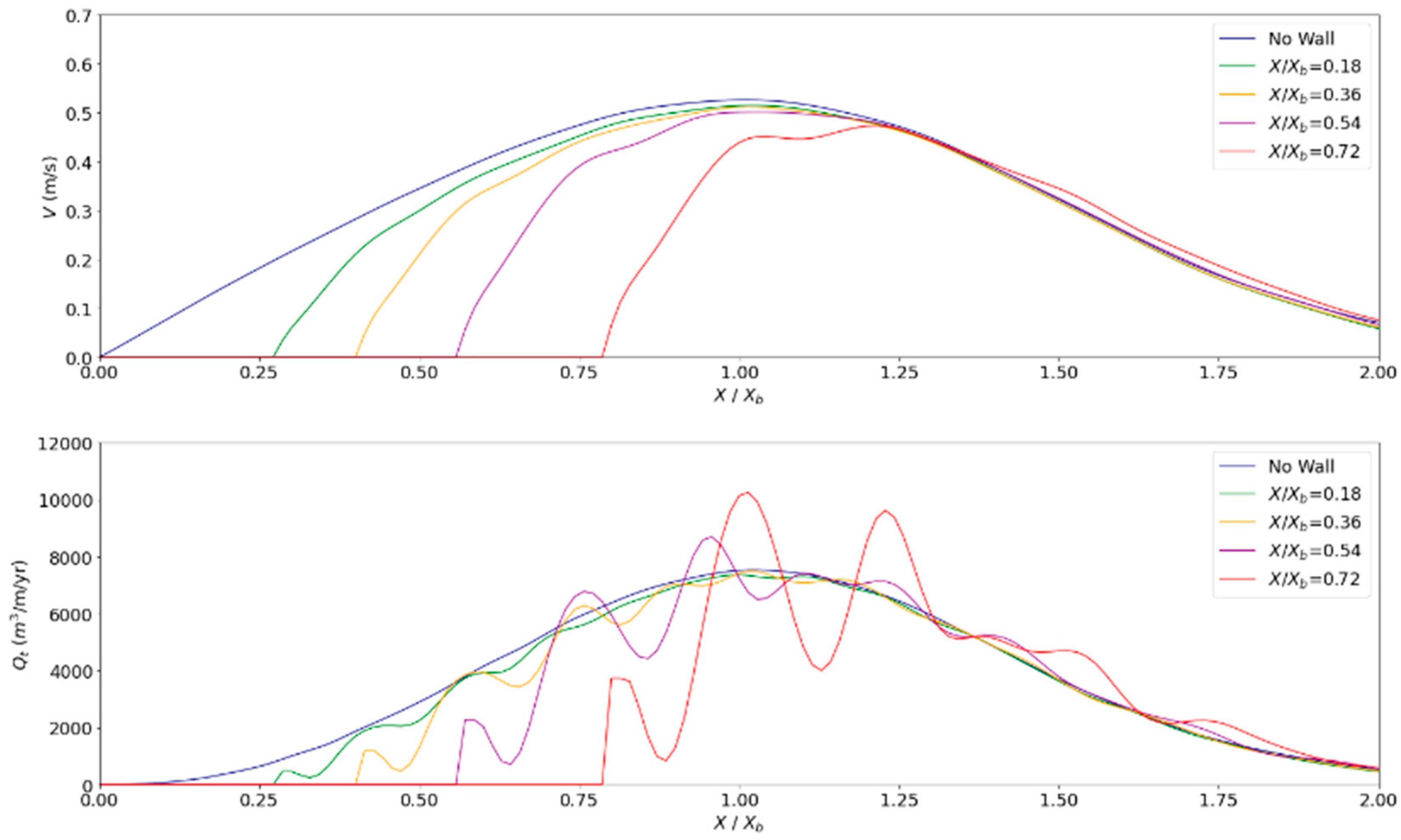
4. Numerical Evaluation of the Effect of Wave Reflection on Longshore Coastal Processes
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Roelvink, D.; Reniers, A. A Guide to Modeling Coastal Morphology, 1st ed.; Word Scientific: Singapore, 2012; p. 292. [Google Scholar]
- Brown, J.M.; Davies, A.G. Methods for medium-term prediction of the net sediment transport by waves and currents in complex coastal regions. Cont. Shelf Res. 2009, 29, 1502–1514. [Google Scholar] [CrossRef]
- Gad, F.-K.; Hatiris, G.-A.; Loukaidi, V.; Dimitriadou, S.; Drakopoulou, P.; Sioulas, A.; Kapsimalis, V. Long-Term Shoreline Displacements and Coastal Morphodynamic Pattern of North Rhodes Island, Greece. Water 2018, 10, 849. [Google Scholar] [CrossRef]
- Papadimitriou, A.; Panagopoulos, L.; Chondros, M.; Tsoukala, V. A wave input-reduction method incorporating initiation of sediment motion. J. Mar. Sci. Eng. 2020, 8, 597. [Google Scholar] [CrossRef]
- Papadimitriou, A.; Chondros, M.; Metallinos, A.; Tsoukala, V. Accelerating Predictions of Morphological Bed Evolution by Combining Numerical Modelling and Artificial Neural Networks. J. Mar. Sci. Eng. 2022, 10, 1621. [Google Scholar] [CrossRef]
- Malliouri, D.I.; Petrakis, S.; Vandarakis, D.; Moraitis, V.; Goulas, T.; Hatiris, G.A.; Drakopoulou, P.; Kapsimalis, V. A Chronology-Based Wave Input Reduction Technique for Simulations of Long-Term Coastal Morphological Changes: An Application to the Beach of Mastichari, Kos Island, Greece. Water 2023, 15, 389. [Google Scholar] [CrossRef]
- Latteux, B. Harbour design including sedimentological problems using mainly numerical techniques. In Proceedings of the 17th International Conference on Coastal Engineering, Sydney, Australia, 23–28 March 1980. [Google Scholar] [CrossRef]
- Liu, P.L.F.; Losada, I.J. Wave propagation modeling in coastal engineering. J. Hydraul. Res. 2002, 40, 229–240. [Google Scholar] [CrossRef]
- Ilic, S.; van der Westhuysen, A.J.; Roelvink, J.A.; Chadwick, A.J. Multidirectional wave transformation around detached breakwaters. Coast. Eng. 2007, 54, 775–789. [Google Scholar] [CrossRef]
- Du, Y.; Pan, S.; Chen, Y. Modelling the effect of wave overtopping on nearshore hydrodynamics and morphodynamics around shore-parallel breakwaters. Coast. Eng. 2010, 57, 812–826. [Google Scholar] [CrossRef]
- Nam, P.T.; Larson, M.; Hanson, H.; Hoan, L.X. A numerical model of beach morphological evolution due to waves and currents in the vicinity of coastal structures. Coast. Eng. 2011, 58, 863–876. [Google Scholar] [CrossRef]
- Postacchini, M.; Russo, A.; Carniel, S.; Brocchini, M. Assessing the Hydro-Morphodynamic Response of a Beach Protected by Detached, Impermeable, Submerged Breakwaters: A Numerical Approach. J. Coast. Res. 2016, 32, 590–602. [Google Scholar] [CrossRef]
- Karambas, T.V.; Samaras, A.G. An integrated numerical model for the design of coastal protection structures. J. Mar. Sci. Eng. 2017, 5, 50. [Google Scholar] [CrossRef]
- Ranasinghe, R.S. Modelling of waves and wave-induced currents in the vicinity of submerged structures under regular waves using nonlinear wave-current models. Ocean Eng. 2022, 247, 110707. [Google Scholar] [CrossRef]
- Afentoulis, V.; Papadimitriou, A.; Belibassakis, K.; Tsoukala, V. A coupled model for sediment transport dynamics and prediction of seabed morphology with application to 1DH/2DH coastal engineering problems. Oceanologia 2022, 64, 514–534. [Google Scholar] [CrossRef]
- Badiei, P.; Kamphuis, J.W.; Hamilton, D.G. Physical experiments on the effects of groins on shore morphology. In Proceedings of the 24th International Conference on Coastal Engineering, Kobe, Japan, 23–28 October 1994. [Google Scholar] [CrossRef]
- Ming, D.; Chiew, Y.-M. Shoreline Changes behind Detached Breakwater. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 63–70. [Google Scholar] [CrossRef]
- Mory, M.; Hamm, L. Wave height, setup and currents around a detached breakwater submitted to regular or random wave forcing. Coast. Eng. 1997, 31, 77–96. [Google Scholar] [CrossRef]
- Lorenzoni, C.; Postacchini, M.; Brocchini, M.; Mancinelli, A. Experimental study of the short-term efficiency of different breakwater configurations on beach protection. J. Ocean Eng. Mar. Energy 2016, 2, 195–210. [Google Scholar] [CrossRef]
- Metallinos, A.S.; Klonaris, G.T.; Memos, C.D.; Dimas, A.A. Hydrodynamic conditions in a submerged porous breakwater. Ocean Eng. 2019, 172, 712–725. [Google Scholar] [CrossRef]
- Klonaris, G.T.; Metallinos, A.S.; Memos, C.D.; Galani, K.A. Experimental and numerical investigation of bed morphology in the lee of porous submerged breakwaters. Coast. Eng. 2020, 155, 103591. [Google Scholar] [CrossRef]
- Yu, Y.X.; Liu, S.X.; Li, Y.S.; Wai, O.W.H. Refraction and diffraction of random waves through breakwater. Ocean Eng. 2000, 27, 489–509. [Google Scholar] [CrossRef]
- Bos, K.J.; Roelvink, J.A.; Dingemans, M.W. Modelling the impact of detached breakwaters on the coast. In Proceedings of the 25th International Conference on Coastal Engineering, Orlando, FL, USA, 2–6 September 1996. [Google Scholar] [CrossRef]
- Cáceres, I.; Sánchez-Arcilla, A.; Zanuttigh, B.; Lamberti, A.; Franco, L. Wave overtopping and induced currents at emergent low crested structures. Coast. Eng. 2005, 52, 931–947. [Google Scholar] [CrossRef]
- Klonaris, G.T.; Memos, C.D.; Drønen, N.K. High-Order Boussinesq-Type Model for Integrated Nearshore Dynamics. J. Waterw. Port Coast. Ocean. Eng. 2016, 142, 04016010. [Google Scholar] [CrossRef]
- Gallerano, F.; Cannata, G.; Palleschi, F. Hydrodynamic Effects Produced by Submerged Breakwaters in a Coastal Area with a Curvilinear Shoreline. J. Mar. Sci. Eng. 2019, 7, 337. [Google Scholar] [CrossRef]
- Do, J.D.; Jin, J.Y.; Hyun, S.K.; Jeong, W.M.; Chang, Y.S. Numerical investigation of the effect of wave diffraction on beach erosion/accretion at the Gangneung Harbor, Korea. J. Hydro-Environ. Res. 2020, 29, 31–44. [Google Scholar] [CrossRef]
- Metallinos, A.; Chondros, M.; Papadimitriou, A. Simulating Nearshore Wave Processes Utilizing an Enhanced Boussinesq-Type Model. Modelling 2021, 2, 686–705. [Google Scholar] [CrossRef]
- Johnson, H.K.; Karambas, T.V.; Avgeris, I.; Zanuttigh, B.; Gonzalez-Marco, D.; Caceres, I. Modelling of waves and currents around submerged breakwaters. Coast. Eng. 2005, 52, 949–969. [Google Scholar] [CrossRef]
- Ruggiero, P. Impacts of shoreline armoring on sediment dynamics. In Puget Sound Shorelines and the Impacts of Armoring—Proceedings of a State of the Science Workshop, May 2009: U.S. Geological Survey Scientific Investigations Report 2010-5254; U.S. Geological Survey: Reston, VA, USA, 2009. [Google Scholar]
- Kraus, N.C.; McDougal, W.G. The effects of seawalls on the beach: Part I, an updated literature review. J. Coast. Res. 1996, 12, 691–701. [Google Scholar]
- Birkemeier, W.A. The Effect of Structures and Lake Level on Bluff and Shore Erosion in Berrien County, Michigan; US Army Corps Engineer, Coastal Engineering Research Center: Fort Belvoir, VA, USA, 1980. [Google Scholar]
- Macdonald, H.V.; Patterson, D.C. Beach response to coastal works Gold Coast, Australia. In Proceedings of the 19th International Conference on Coastal Engineering, Houston, TX, USA, 3–7 September 1984. [Google Scholar]
- Morton, R.A. Interactions of Storms, Seawalls, and Beaches of the Texas Coast. J. Coast. Res. 1988, 113–134. [Google Scholar]
- Dean, R.G. Coastal Armoring: Effects, Principles and Mitigation. In Proceedings of the 20th International Conference on Coastal Engineering, Taipei, Taiwan, 9–14 November 1986. [Google Scholar]
- Kamphuis, J.W.; Rakha, K.A.; Jui, J. Hydraulic model experiments on seawalls. In Proceedings of the 23th International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992. [Google Scholar]
- Rakha, K.A.; Kamphuis, J.W. Wave-induced currents in the vicinity of a seawall. Coast. Eng. 1997, 30, 23–52. [Google Scholar] [CrossRef]
- Rakha, K.A.; Kamphuis, J.W. A morphology model for an eroding beach backed by a seawall. Coast. Eng. 1997, 30, 53–75. [Google Scholar] [CrossRef]
- Miles, J.R.; Russell, P.E.; Huntley, D.A. Field measurements of sediment dynamics in front of a seawall. J. Coast. Res. 2001, 17, 195–206. [Google Scholar]
- Ruggiero, P.; McDougal, W.G. An analytic model for the prediction on wave setup, longshore currents and sediment transport on beaches with seawalls. Coast. Eng. 2001, 43, 161–182. [Google Scholar] [CrossRef]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2007; ISBN 9780511618536. [Google Scholar]
- Wei, G.; Kirby, J.T. Time-Dependent Numerical Code for Extended Boussinesq Equations. J. Waterw. Port Coast. Ocean. Eng. 1995, 121, 251–261. [Google Scholar] [CrossRef]
- Chondros, M.K.; Memos, C.D. A 2DH nonlinear Boussinesq-type wave model of improved dispersion, shoaling, and wave generation characteristics. Coast. Eng. 2014, 91, 99–122. [Google Scholar] [CrossRef]
- Karambas, T.V.; Memos, C.D. A 2DH post-Boussinesq model for weakly nonlinear fully dispersive water waves. In Proceedings of the 31st International Conference on Coastal Engineering, Hamburg, Germany, 31 August–5 September 2008. [Google Scholar]
- Nwogu, O. Alternative Form of Boussinesq Equations for Nearshore Wave Propagation. J. Waterw. Port Coast. Ocean Eng. 1993, 119, 618–638. [Google Scholar] [CrossRef]
- Kirby, J.T.; Dalrymple, R.A. A parabolic equation for the combined refraction diffraction of Stokes waves by mildly varying topography. J. Fluid Mech. 1983, 136, 453–466. [Google Scholar] [CrossRef]
- Li, B. An evolution equation for water waves. Coast. Eng. 1994, 23, 227–242. [Google Scholar] [CrossRef]
- Copeland, G.J.M. A practical alternative to the “mild-slope” wave equation. Coast. Eng. 1985, 9, 125–149. [Google Scholar] [CrossRef]
- Chondros, M.K.; Metallinos, A.S.; Memos, C.D.; Karambas, T.V.; Papadimitriou, A.G. Concerted nonlinear mild-slope wave models for enhanced simulation of coastal processes. Appl. Math. Model. 2021, 91, 508–529. [Google Scholar] [CrossRef]
- Gallerano, F.; Cannata, G.; De Gaudenzi, O.; Scarpone, S. Modeling Bed Evolution Using Weakly Coupled Phase-Resolving Wave Model and Wave-Averaged Sediment Transport Model. Coast. Eng. J. 2016, 58, 1650011. [Google Scholar] [CrossRef]
- Klonaris, G.T.; Memos, C.D.; Drønen, N.K.; Deigaard, R. Boussinesq-type modeling of sediment transport and coastal morphology. Coast. Eng. J. 2017, 59, 1750007-1–1750007-2. [Google Scholar] [CrossRef]
- Afentoulis, V.; Papadimitriou, A.; Benoit, M.; Tsoukala, V. Numerical Approaches for the Evaluation of Sediment Transport Mechanisms on a Shallow Sloping Sea Bottom. In Proceedings of the Design and Management of Port, Coastal and Offshore Works Conference, Athens, Greece, 8–11 May 2019. [Google Scholar]
- Tehranirad, B.; Kirby, J.T.; Shi, F. A Numerical Model for Tsunami-Induced Morphology Change. Pure Appl. Geophys. 2021, 178, 5031–5059. [Google Scholar] [CrossRef]
- Tsiaras, A.-C.; Karambas, T.; Koutsouvela, D. Design of Detached Emerged and Submerged Breakwaters for Coastal Protection: Development and Application of an Advanced Numerical Model. J. Waterw. Port Coast. Ocean. Eng. 2020, 146, 04020012. [Google Scholar] [CrossRef]
- Demirbilek, Z.; Panchang, V. CGWAVE: A Coastal Surface Water Wave Model of the Mild Slope Equation; Technical Report CHL-98-26; US Army Corps Engineer Waterways Experiment Station: Vicksburg, MS, USA, 1998. [Google Scholar]
- Lee, C.; Sun Park, W.; Cho, Y.S.; Suh, K. Hyperbolic mild-slope equations extended to account for rapidly varying topography. Coast. Eng. 1998, 34, 243–257. [Google Scholar] [CrossRef]
- Zhao, L.; Panchang, V.; Chen, W.; Demirbilek, Z.; Chhabbra, N. Simulation of wave breaking effects in two-dimensional elliptic harbor wave models. Coast. Eng. 2001, 42, 359–373. [Google Scholar] [CrossRef]
- Chondros, M.K.; Metallinos, A.S.; Papadimitriou, A.G. An enhanced mild slope wave model with parallel implementation and Artificial Neural Network support for simulation of wave disturbance and resonance in ports. J. Mar. Sci. Eng. 2024, 12, 281. [Google Scholar] [CrossRef]
- Chondros, M.; Metallinos, A.; Papadimitriou, A.; Tsoukala, V. Sediment Transport Equivalent Waves for Estimating Annually Averaged Sedimentation and Erosion Trends in Sandy Coastal Areas. J. Mar. Sci. Eng. 2022, 10, 1726. [Google Scholar] [CrossRef]
- Battjes, J.A.; Janssen, J.P.F.M. Energy Loss and Set-Up Due to Breaking of Random Waves. In Proceedings of the 16th International Conference on Coastal Engineering, Hamburg, Germany, 27 August–3 September 1978. [Google Scholar] [CrossRef]
- Dingemans, M.W. Verification of numerical wave propagation models with field measurements: CREDIZ verification Haringvliet. w0488 1983. [Google Scholar]
- Miche, M. Mouvements ondulatoires de la mer en profondeur constante ou décroissante. Ann. Ponts Chaussées 1944, 114, 369–406. [Google Scholar]
- Soulsby, R. Dynamics of Marine Sands: A Manual for Practical Applications, 1st ed.; Thomas Telford: London, UK, 1997; p. 249. [Google Scholar]
- Van Rijn, L.C. Sediment Transport, Part III: Bed forms and Alluvial Roughness. J. Hydraul. Eng. 1984, 110, 1733–1754. [Google Scholar] [CrossRef]
- Long, W.; Kirby, J.T.; Shao, Z. A numerical scheme for morphological bed level calculations. Coast. Eng. 2008, 55, 167–180. [Google Scholar] [CrossRef]
- Inman, D.L.; Bowen, A.J. Flume Experiments on Sand Transport by Waves and Currents. In Proceedings of the 8th International Conference on Coastal Engineering, Mexico City, Mexico, November 1962. [Google Scholar]
- Mase, H.; Kirby, J.T. Hybrid frequency-domain KdV equation for random wave transformation. In Proceedings of the 23th International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992. [Google Scholar]
- Chawla, A.; Ozkan-Haller, H.T.; Kirby, J.T. Experimental study of breaking waves over a shoal. In Proceedings of the 25th International Conference on Coastal Engineering, Orlando, FL, USA, 2–6 September 1996. [Google Scholar]
- Swart, D.H. Offshore Sediment Transport and Equilibrium Beach Profiles. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 18 December 1974. [Google Scholar]
- Bouws, E.; Gunther, H.; Rosenthal, W.; Vincent, C.L. Similarity of the wind wave spectrum in finite depth water 1. Spectral form. J. Geophys. Res. 1985, 90, 975–986. [Google Scholar] [CrossRef]
- Chawla, A.; Özkan-Haller, H.T.; Kirby, J.T. Spectral Model for Wave Transformation and Breaking over Irregular Bathymetry. J. Waterw. Port Coast. Ocean Eng. 1998, 124, 189–198. [Google Scholar] [CrossRef]
- Kramer, M.; Zanuttigh, B.; van der Meer, J.W.; Vidal, C.; Gironella, F.X. Laboratory experiments on low-crested breakwaters. Coast. Eng. 2005, 52, 867–885. [Google Scholar] [CrossRef]
- Zanuttigh, B.; Lamberti, A. Experimental Analysis and Numerical Simulations of Waves and Current Flows Around Low-Crested Rubble-Mound Structures. J. Waterw. Port Coast. Ocean. Eng. 2006, 132, 10–27. [Google Scholar] [CrossRef]
- Gravens, M.; Wang, P. Data Report: Laboratory Testing of Longshore Sand Transport by Waves and Currents; Technical Report, ERDC/CHL TR-07-8; Coastal and Hydraulics Laboratory, US Army Engineer Research and Development Center: Vicksburg, MS, USA, 2007. [Google Scholar]
- Nam, P.T.; Larson, M.; Hanson, H.; Hoan, L.X. A numerical model of nearshore waves, currents, and sediment transport. Coast. Eng. 2009, 56, 1084–1096. [Google Scholar] [CrossRef]
- Larson, M.; Wamsley, T.V. A formula for longshore sediment transport in the Swash. In Proceedings of the Coastal Sediments ’07—6th International Symposium on Coastal Engineering and Science of Coastal Sediment Processes, New Orleans, LA, USA, 13–17 May 2007. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | (cm) | (s) | (°) | Ripple Wavelength λ (cm) | Ripple Height η (cm) |
|---|---|---|---|---|---|
| 1C | 15.1 | 1.4 | 270 | 6.5 | 1.0 |
| 2C | 16.8 | 2.0 | 270 | 10.6 | 1.5 |
| Case | (cm) | (s) | (°) | (°) | |
|---|---|---|---|---|---|
| Test 5 | 2.33 | 0.73 | 270 | 10 | 5 |
| Test 6 | 2.49 | 0.71 | 270 | 10 | 20 |
| Test | Sea State | (cm) | (s) | (°) | s (-) |
|---|---|---|---|---|---|
| 37 | Regular | 10.3 | 1.81 | 270 | - |
| 35 | Irregular | 5.4 | 1.32 | 270 | 50 |
| Test | (m) | (s) | ||
|---|---|---|---|---|
| Case 1a | 2.5 | 8 | 20 | 1:10 |
| Case 1b | 3.5 | 12 | 20 | 1:10 |
| Case 2a | 2.5 | 8 | 20 | 1:50 |
| Case 2b | 3.5 | 12 | 20 | 1:50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chondros, M.K.; Metallinos, A.S.; Papadimitriou, A.G. Integrated Modeling of Coastal Processes Driven by an Advanced Mild Slope Wave Model. Modelling 2024, 5, 458-482. https://doi.org/10.3390/modelling5020025
Chondros MK, Metallinos AS, Papadimitriou AG. Integrated Modeling of Coastal Processes Driven by an Advanced Mild Slope Wave Model. Modelling. 2024; 5(2):458-482. https://doi.org/10.3390/modelling5020025
Chicago/Turabian StyleChondros, Michalis K., Anastasios S. Metallinos, and Andreas G. Papadimitriou. 2024. "Integrated Modeling of Coastal Processes Driven by an Advanced Mild Slope Wave Model" Modelling 5, no. 2: 458-482. https://doi.org/10.3390/modelling5020025
APA StyleChondros, M. K., Metallinos, A. S., & Papadimitriou, A. G. (2024). Integrated Modeling of Coastal Processes Driven by an Advanced Mild Slope Wave Model. Modelling, 5(2), 458-482. https://doi.org/10.3390/modelling5020025