
On Long-Range Characteristic Length Scales of Shell Structures


Abstract
:1. Introduction
2. Preliminaries
2.1. Navier’s Equations of Elasticity
2.2. Surface Definitions
Profile Functions and Parametrisation
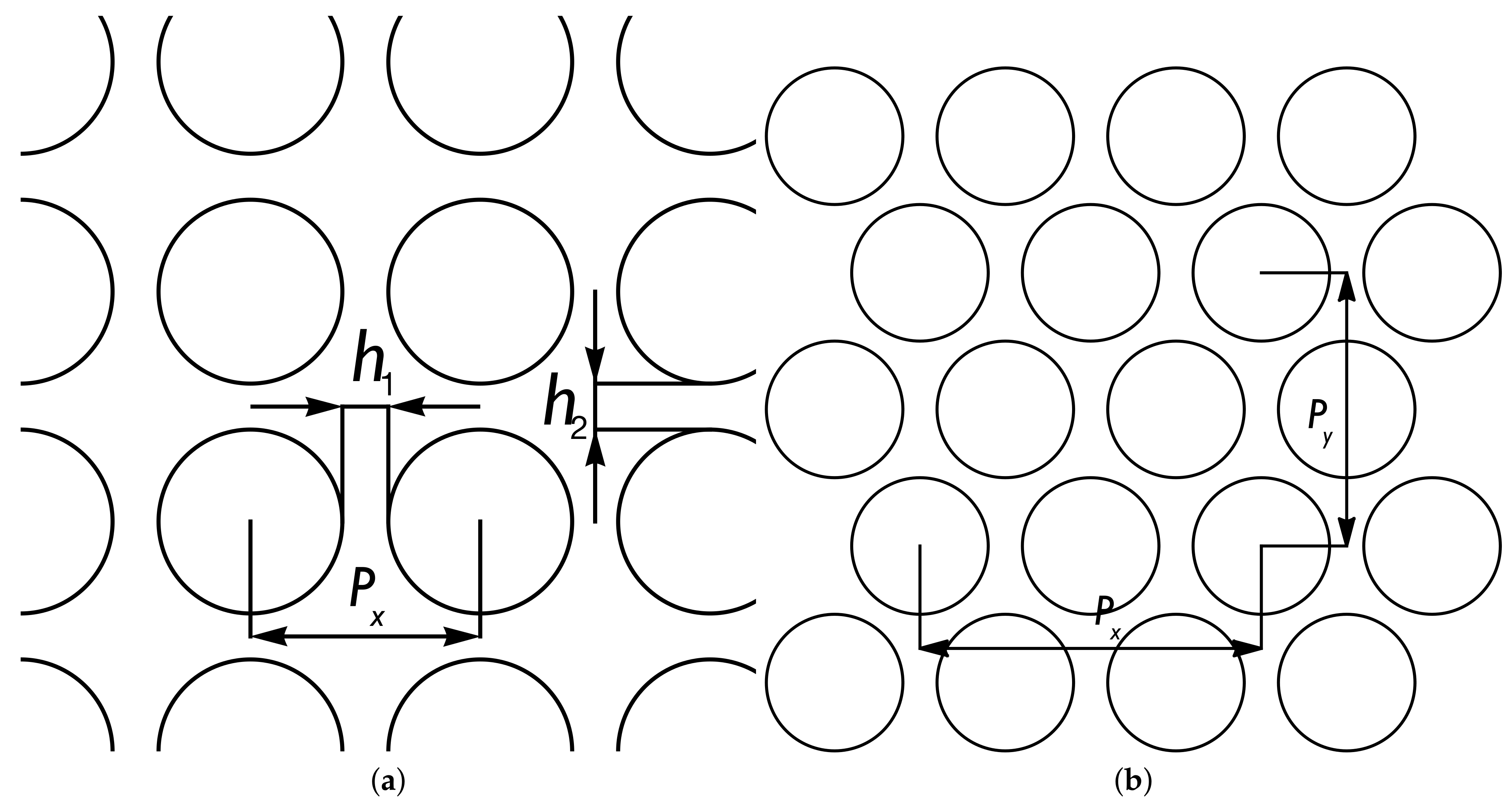
2.3. Perforations
2.4. Finite Element Method
Implementations
3. Shell Models
- 1
- Parabolic (Zero Gaussian curvature shells). .
- 2
- Elliptic (Positive Gaussian curvature shells). .
- 3
- Hyperbolic (Negative Gaussian curvature shells). .
Dimensionally Reduced Elasticity Equations: Naghdi Model
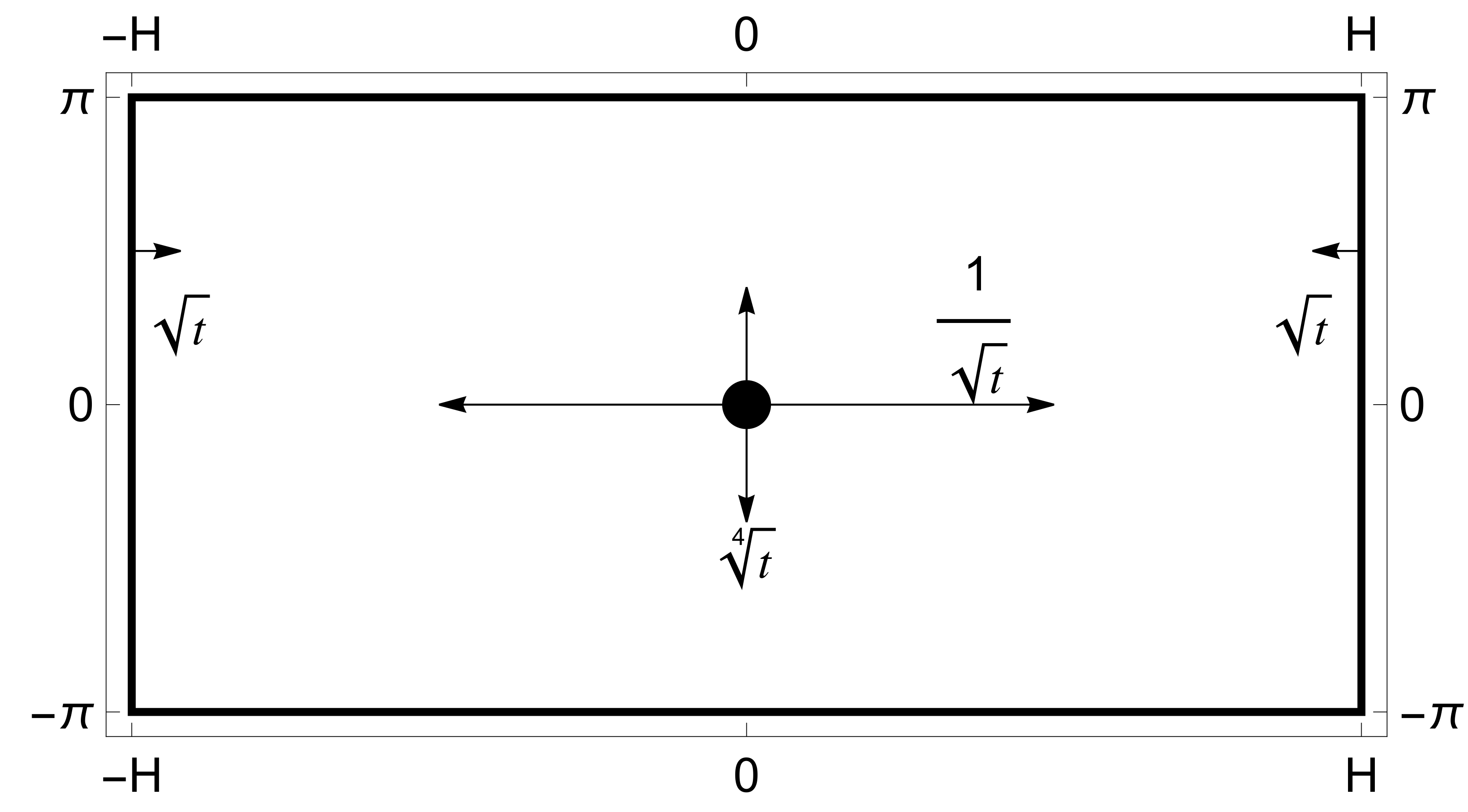
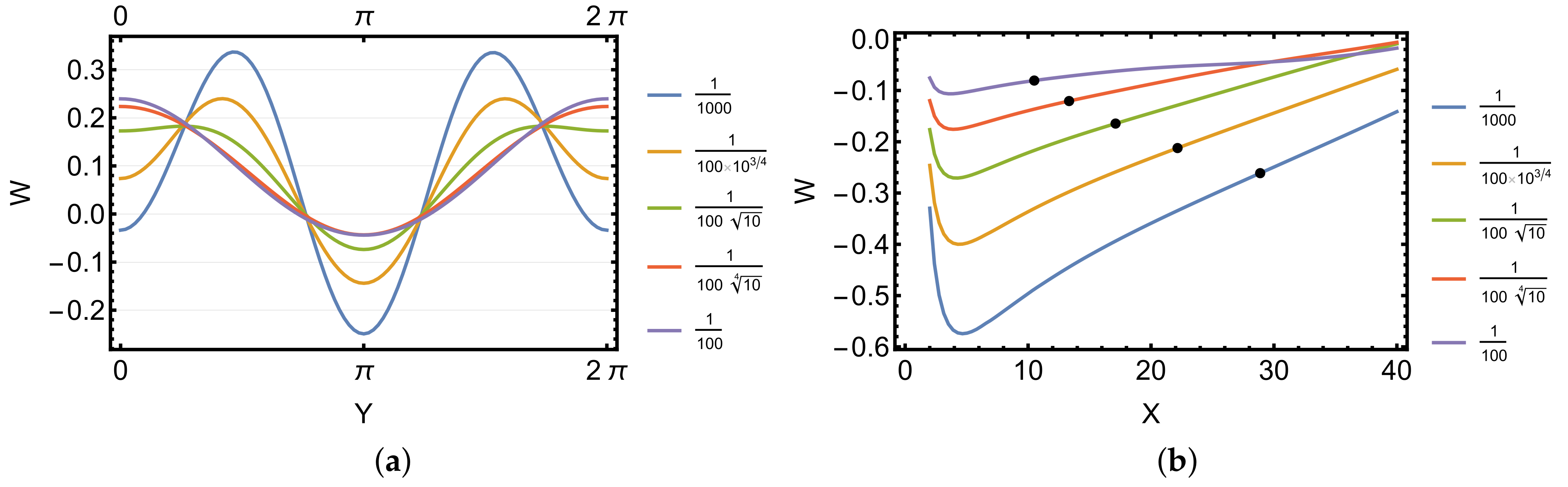
4. Boundary and Internal Layers
5. Numerical Simulations
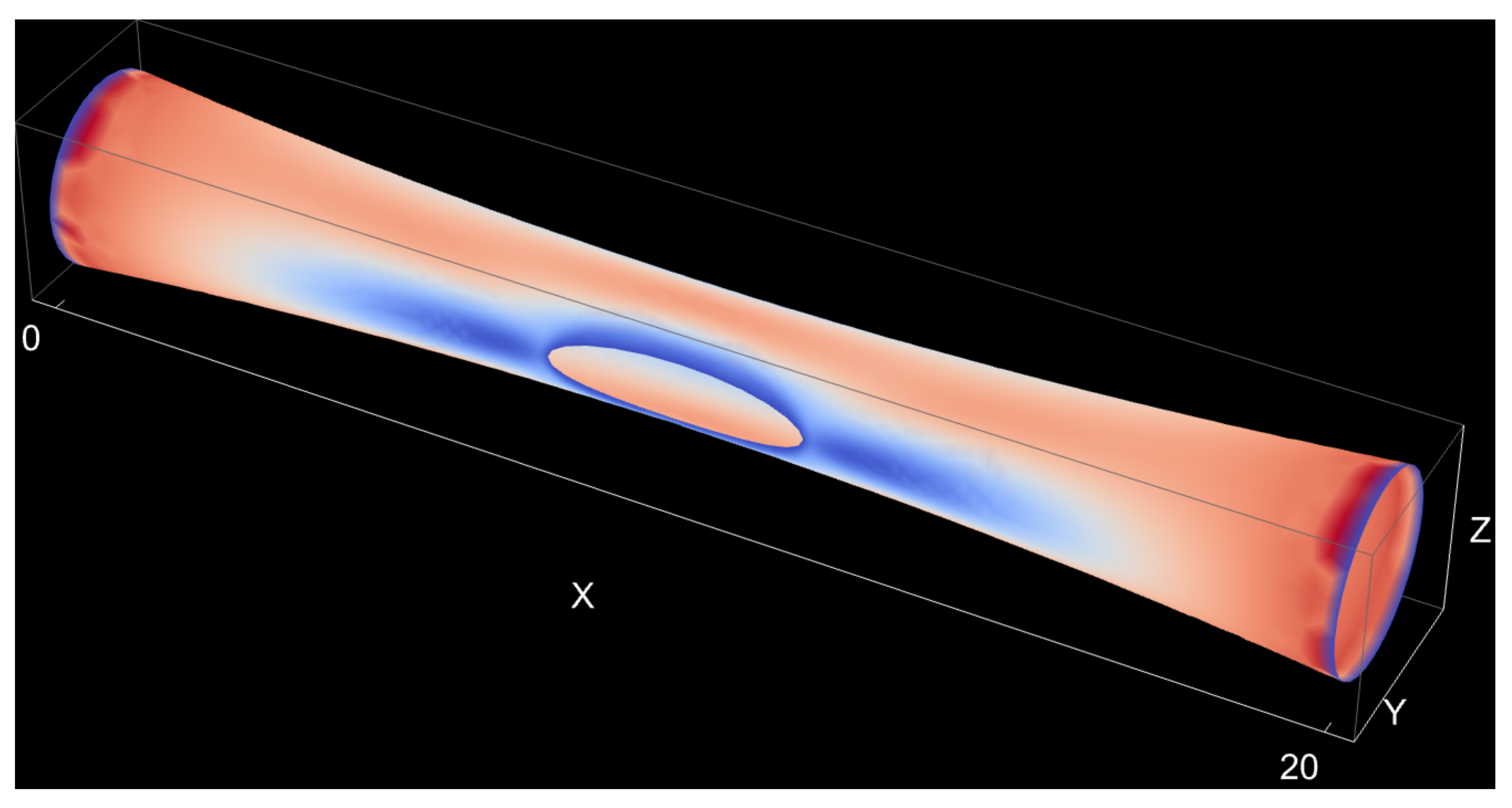
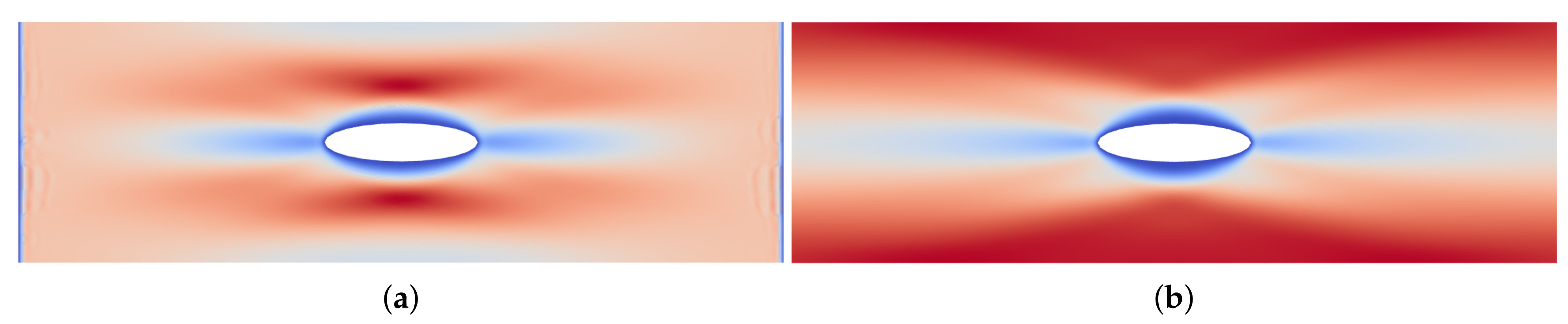
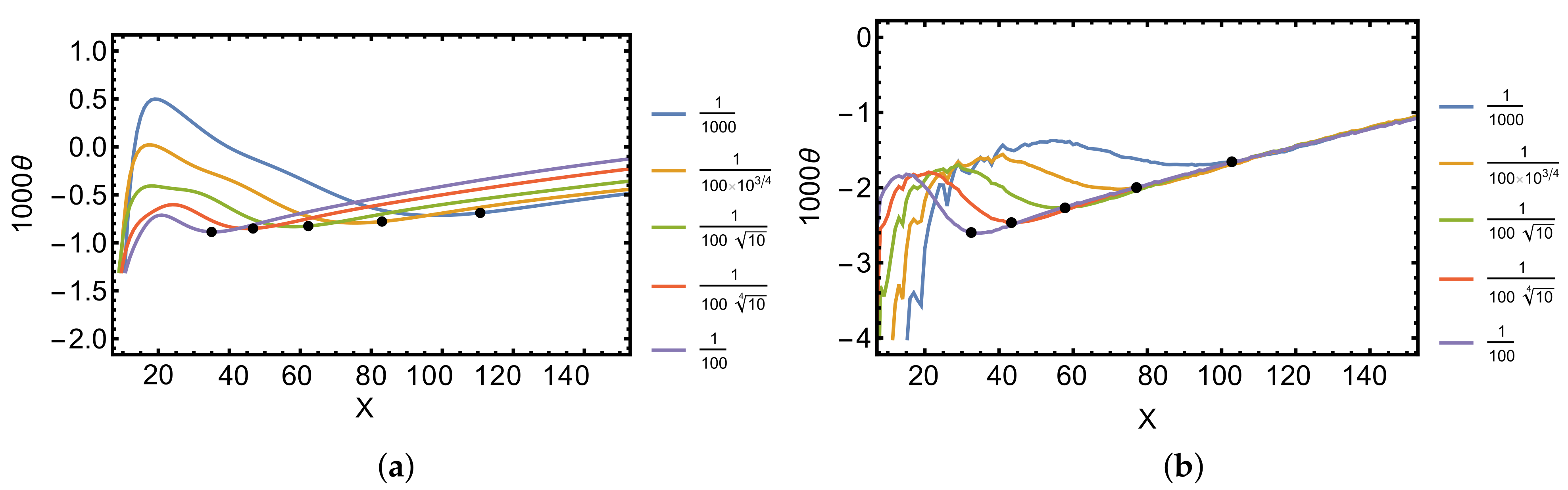
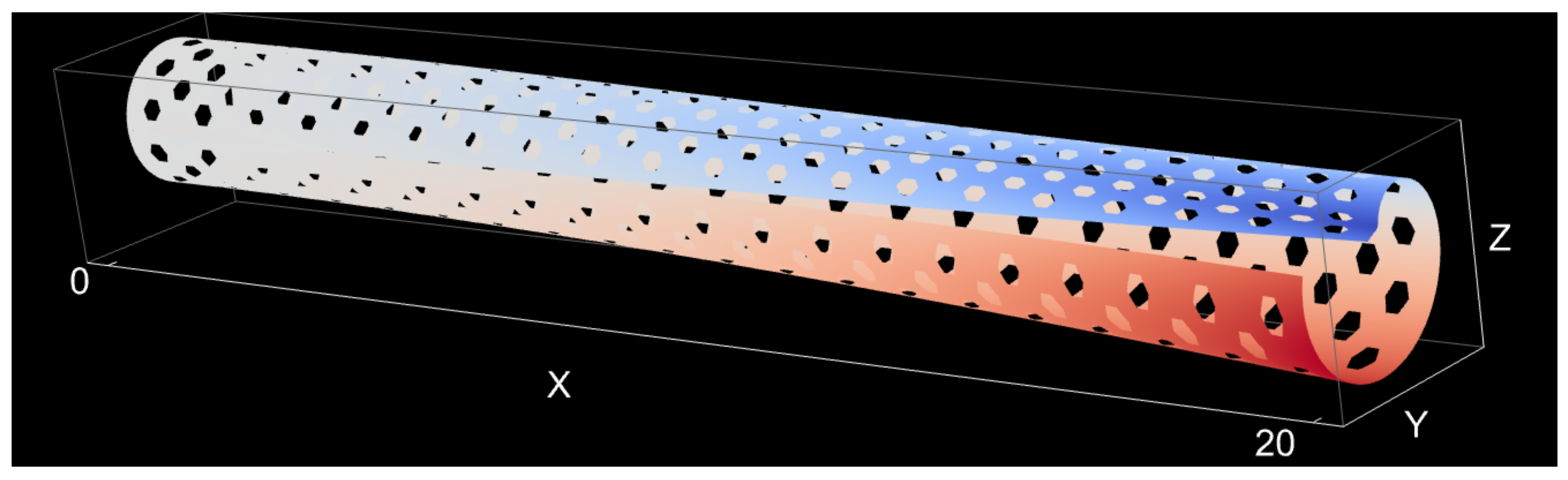
5.1. Wind Turbine: Manhole
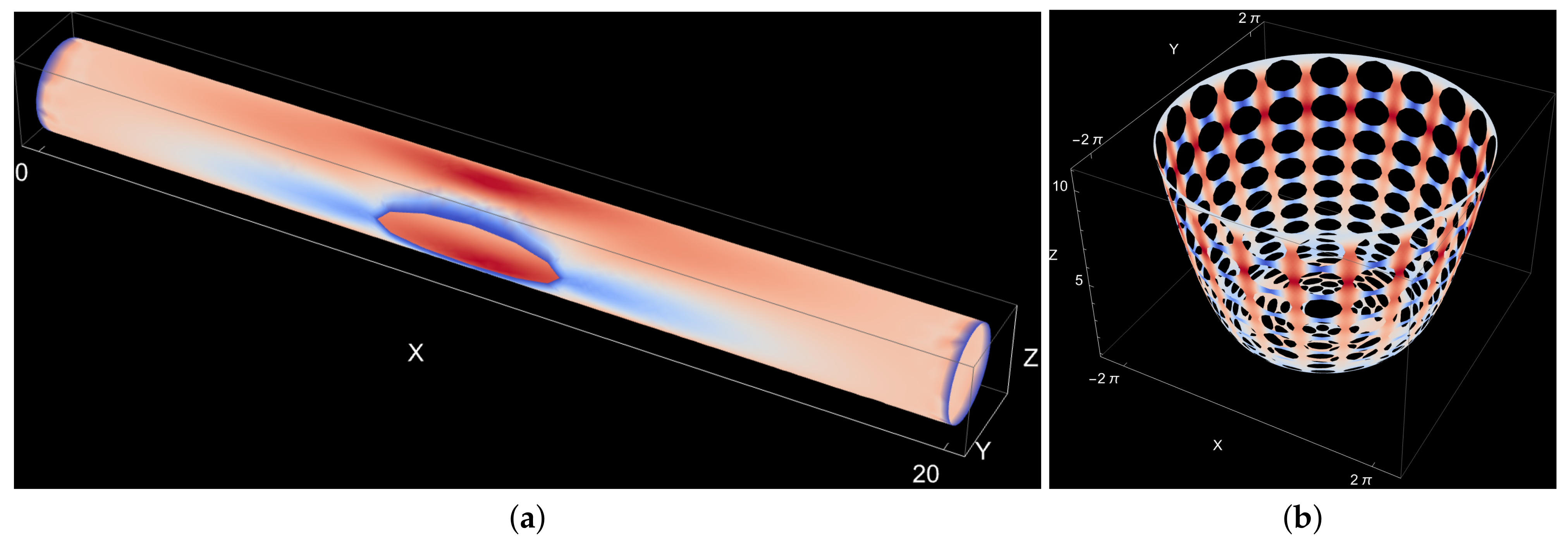
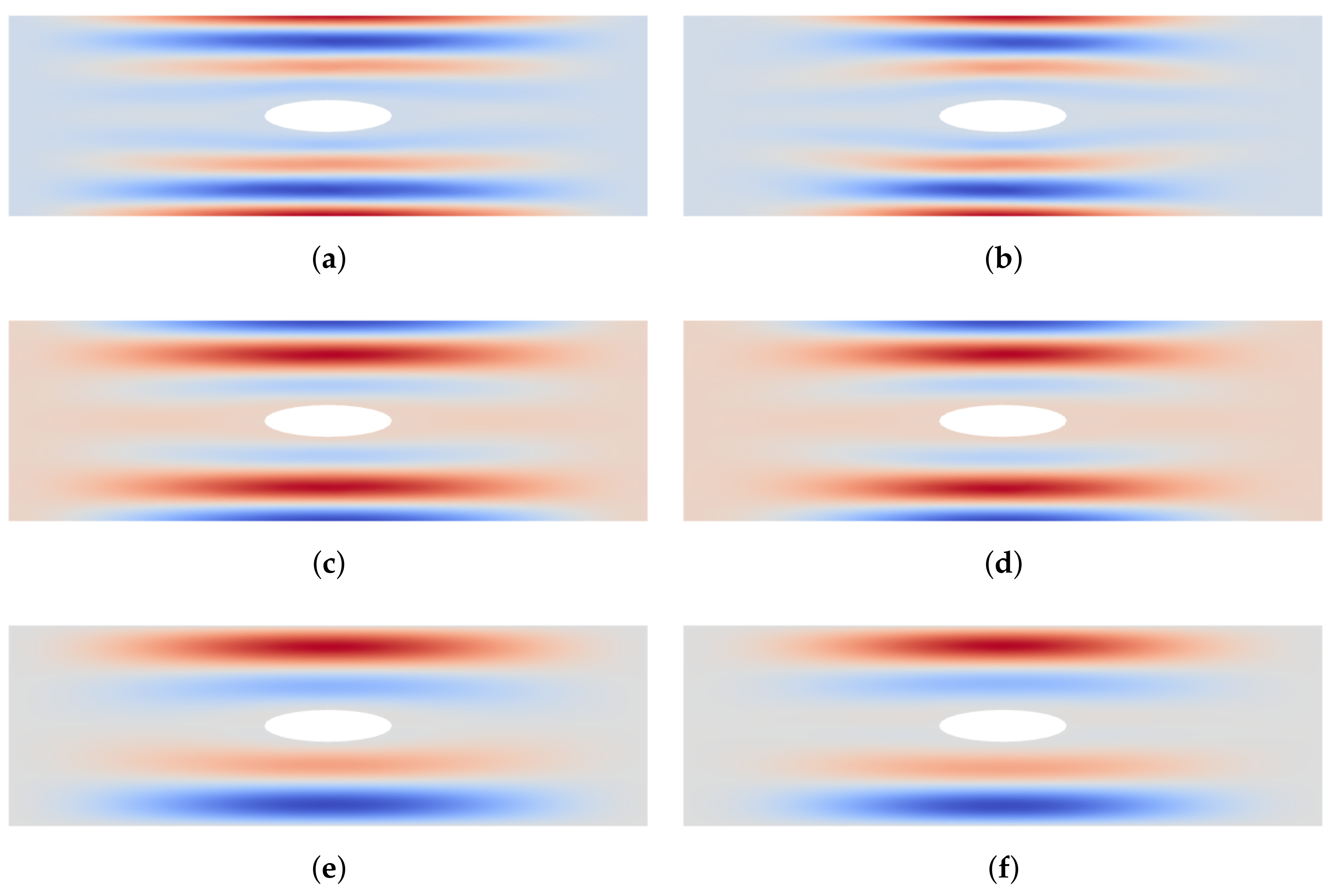
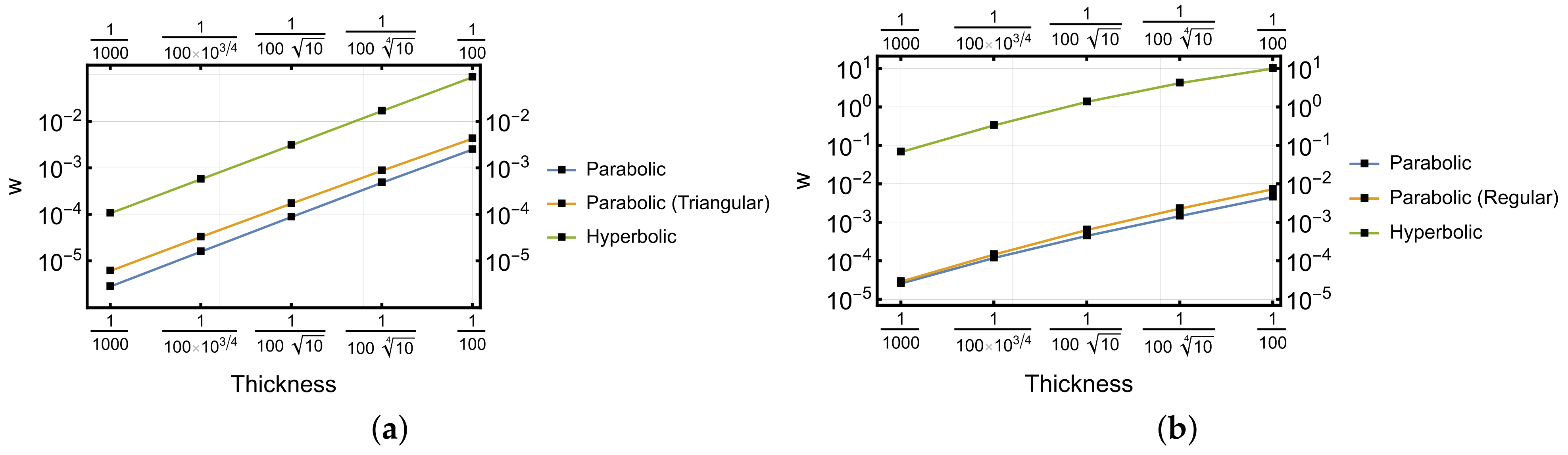
5.2. Slit Shells: Torsion Effect
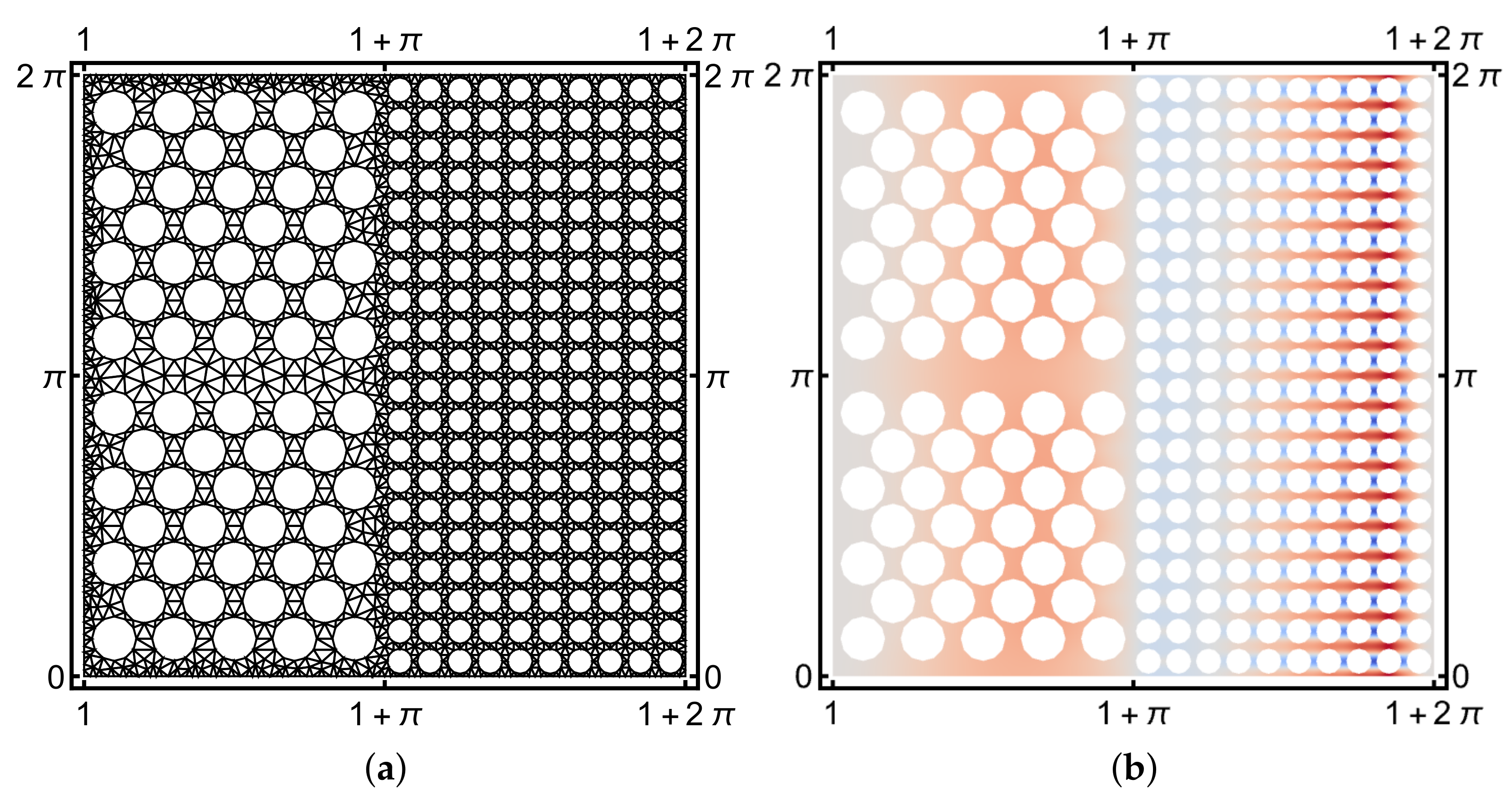
5.3. Curvature Effect
6. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Mathematical Shell Model
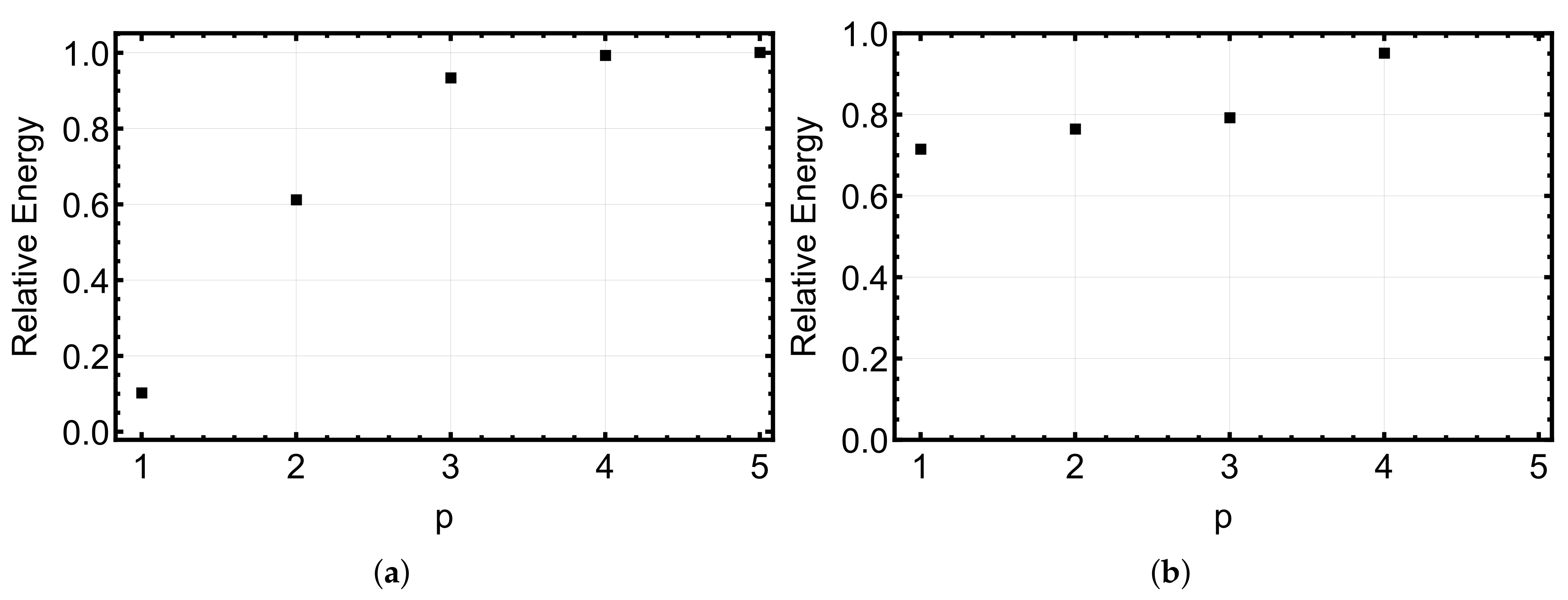
Appendix B. On Buckling Modes


References
- Chapelle, D.; Bathe, K.J. The Finite Element Analysis of Shells; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Pitkäranta, J.; Leino, Y.; Ovaskainen, O.; Piila, J. Shell Deformation states and the Finite Element Method: A Benchmark Study of Cylindrical Shells. Comput. Methods Appl. Mech. Eng. 1995, 128, 81–121. [Google Scholar] [CrossRef]
- Pitkäranta, J.; Matache, A.M.; Schwab, C. Fourier mode analysis of layers in shallow shell deformations. Comput. Methods Appl. Mech. Eng. 2001, 190, 2943–2975. [Google Scholar] [CrossRef] [Green Version]
- Hakula, H.; Havu, V.; Beirao de Veiga, L. Long-Range Boundary Layers in Shells of Revolution. In Proceedings of the 5th International Conference on Computation of Shell and Spatial Structures, Salzburg, Austria, 1–4 June 2005. [Google Scholar]
- Hakula, H. Hp-boundary layer mesh sequences with applications to shell problems. Comput. Math. Appl. 2014, 67, 899–917. [Google Scholar] [CrossRef]
- Sanchez-Palencia, E.; Millet, O.; Béchet, F. Singular Problems in Shell Theory; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Pietraszkiewicz, W.; Konopińska, V. Junctions in shell structures: A review. Thin Walled Struct. 2015, 95, 310–334. [Google Scholar] [CrossRef]
- Malliotakis, G.; Alevras, P.; Baniotopoulos, C. Recent Advances in Vibration Control Methods for Wind Turbine Towers. Energies 2021, 14, 7536. [Google Scholar] [CrossRef]
- Szabo, B.A.; Muntges, D.E. Procedures for the Verification and Validation of Working Models for Structural Shells. J. Appl. Mech. 2005, 72, 907–915. [Google Scholar] [CrossRef]
- Szabo, B.; Babuska, I. Finite Element Analysis; Wiley: Hoboken, NJ, USA, 1991. [Google Scholar]
- Niemi, A.H. Numerical buckling analysis of circular cylindrical shells. In Proceedings of the MAFELAP 2019, Uxbridge, UK, 18–21 June 2019. [Google Scholar]
- Bartels, S.; Bonito, A.; Muliana, A.H.; Nochetto, R.H. Modeling and simulation of thermally actuated bilayer plates. J. Comput. Phys. 2018, 354, 512–528. [Google Scholar] [CrossRef] [Green Version]
- McMillen, T.; Goriely, A. Tendril Perversion in Intrinsically Curved Rods. J. Nonlinear Sci. 2002, 12, 241–281. [Google Scholar] [CrossRef]
- Giani, S.; Hakula, H. On effective material parameters of thin perforated shells under static loading. Comput. Methods Appl. Mech. Eng. 2020, 367, 113094. [Google Scholar] [CrossRef]
- Slaughter, W.S. The Linearized Theory of Elasticity; Birkhäuser: Basel, Switzerland, 2002. [Google Scholar]
- Malinen, M. On the classical shell model underlying bilinear degenerated shell finite elements: General shell geometry. Int. J. Numer. Methods Eng. 2002, 55, 629–652. [Google Scholar] [CrossRef]
- Forskitt, M.; Moon, J.R.; Brook, P.A. Elastic properties of plates perforated by elliptical holes. Appl. Math. Model. 1991, 15, 182–190. [Google Scholar] [CrossRef]
- Burgemeister, K.; Hansen, C. Calculating Resonance Frequencies of Perforated Panels. J. Sound Vib. 1996, 196, 387–399. [Google Scholar] [CrossRef]
- Jhung, M.J.; Yu, S.O. Study on modal characteristics of perforated shell using effective Young’s modulus. Nucl. Eng. Des. 2011, 241, 2026–2033. [Google Scholar] [CrossRef]
- Pitkäranta, J. The problem of membrane locking in finite element analysis of cylindrical shells. Numer. Math. 1992, 61, 523–542. [Google Scholar] [CrossRef]
- Hakula, H.; Leino, Y.; Pitkäranta, J. Scale resolution, locking, and high-order finite element modelling of shells. Comput. Methods Appl. Mech. Engrg. 1996, 133, 157–182. [Google Scholar] [CrossRef]
- Hakula, H.; Tuominen, T. Mathematica implementation of the high order finite element method applied to eigenproblems. Computing 2013, 95, 277–301. [Google Scholar] [CrossRef]
- Do Carmo, M. Differential Geometry of Curves and Surfaces; Prentice Hall: Hoboken, NJ, USA, 1976. [Google Scholar]
- Schwab, C. p- and hp-Finite Element Methods; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Artioli, E.; da Veiga, L.B.; Hakula, H.; Lovadina, C. On the asymptotic behaviour of shells of revolution in free vibration. Comput. Mech. 2009, 44, 45–60. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Geometry | Perforation | H | p | N |
|---|---|---|---|---|---|
| Wind Turbine: Manhole | Parabolic | 60 | 8 | 197,440 | |
| Parabolic | 1000 | 6 | 2,127,240 | ||
| Hyperbolic | 1000 | 6 | 2,127,240 | ||
| Slit Shell: Torsion Effect | Parabolic | 100 | 5 | 1,907,980 | |
| Parabolic | Triangular | 100 | 5 | 2,841,675 | |
| Hyperbolic | 100 | 5 | 1,907,980 | ||
| Parabolic | 1000 | 5 | 1,907,980 | ||
| Parabolic | Regular | 1000 | 5 | 7,126,755 | |
| Hyperbolic | 1000 | 5 | 1,907,980 | ||
| Curvature Effect | Mixed | Multipanel | 6 | 490,145 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hakula, H. On Long-Range Characteristic Length Scales of Shell Structures. Eng 2023, 4, 884-902. https://doi.org/10.3390/eng4010053
Hakula H. On Long-Range Characteristic Length Scales of Shell Structures. Eng. 2023; 4(1):884-902. https://doi.org/10.3390/eng4010053
Chicago/Turabian StyleHakula, Harri. 2023. "On Long-Range Characteristic Length Scales of Shell Structures" Eng 4, no. 1: 884-902. https://doi.org/10.3390/eng4010053
APA StyleHakula, H. (2023). On Long-Range Characteristic Length Scales of Shell Structures. Eng, 4(1), 884-902. https://doi.org/10.3390/eng4010053