Space Systems Dynamics
(Closed)
Share This Topical Collection
Editors
 Prof. Dr. Mikhail Ovchinnikov
Prof. Dr. Mikhail Ovchinnikov
Prof. Dr. Mikhail Ovchinnikov
E-Mail
Website
Collection Editor
Space Systems Dynamics Department, Keldysh Institute of Applied Mathematics of the Russian Academy of Sciences (KIAM RAS), Moscow, Russia
Interests: spaceflight dynamics; applied celestial mechanics and ballistics; formation flying; interplanetary mission design; attitude control systems for small satellites; laboratory simulation and flight testing of the dynamics of small satellites
 Dr. Dmitry Roldugin
Dr. Dmitry Roldugin
Dr. Dmitry Roldugin
E-Mail
Website
Collection Editor
Space Systems Dynamics Department, Keldysh Institute of Applied Mathematics of the Russian Academy of Sciences (KIAM RAS), Moscow, Russia
Interests: spaceflight dynamics; attitude control systems for small satellites; magnetic attitude control systems; artificial intelligence systems for motion control; sliding control
Topical Collection Information
Dear Colleagues,
All steps involved in mission design, its practical realization, and post-mission analysis require that one is familiar with the behavior of the space system, that is, a space system dynamics analysis has to be involved as a guidance tool. This Special Issue will present works discussing advances in spacecraft attitude and orbital dynamics and control, as well as the dynamics and control of multiple interconnected rigid and flexible bodies, dynamics of multibody systems, advances in the knowledge of natural motions of objects in orbit around the Earth, planets, minor bodies, Lagrangian points, and more generally natural orbital dynamics of spacecraft on interplanetary voyages with emphasis on studies and experiences related to current and future missions.
Prof. Dr. Mikhail Ovchinnikov
Dr. Dmitry Roldugin
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Aerospace is an international peer-reviewed open access monthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2400 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- spacecraft dynamics
- attitude motion and control
- orbital motion and control
- interplanetary mission dynamics
- relative motion
- multibody system dynamics
Published Papers (13 papers)
Open AccessArticle
Minimum-Energy Transfer Optimization between Near-Circular Orbits Using an Approximate Closed-Form Solution
by
Kirill Suslov, Maksim Shirobokov and Anastasia Tselousova
Viewed by 1264
Abstract
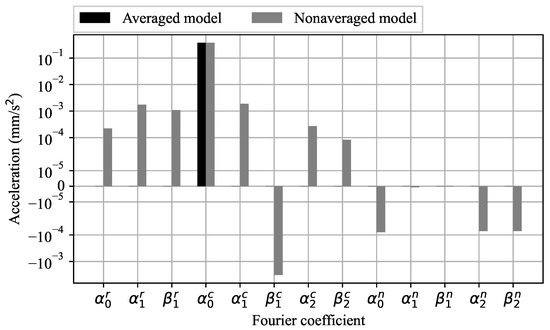
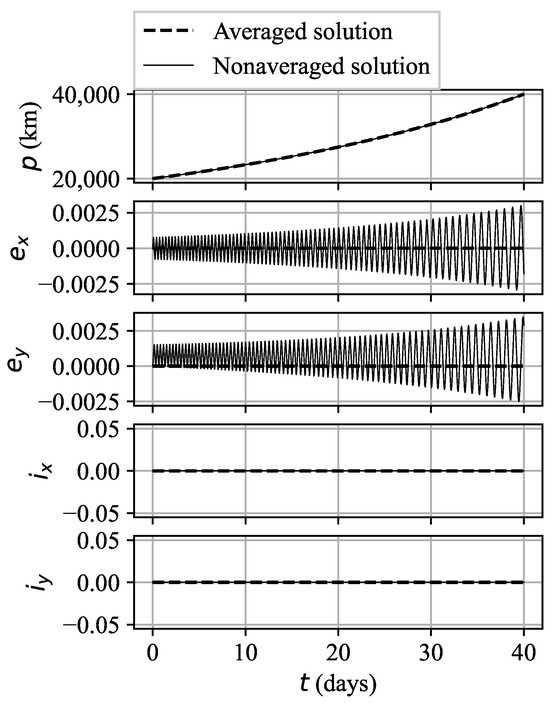
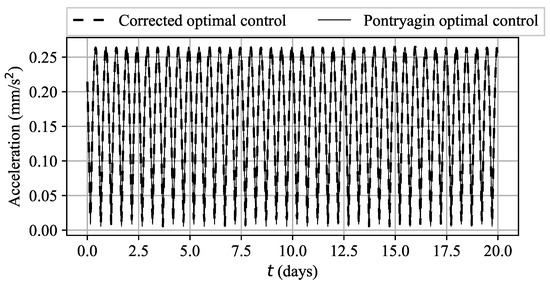
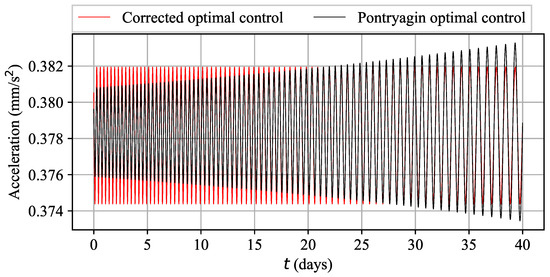
This paper explores the use of the averaging method in the optimal control problem related to the multirevolution orbital transfer of a spacecraft with low-thrust capabilities. The regularized equations of motion are expressed using modified equinoctial elements with the eccentric longitude as a
[...] Read more.
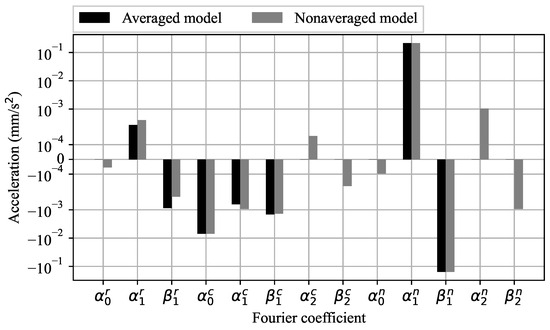
This paper explores the use of the averaging method in the optimal control problem related to the multirevolution orbital transfer of a spacecraft with low-thrust capabilities. The regularized equations of motion are expressed using modified equinoctial elements with the eccentric longitude as a fast variable. The control function is represented as a Fourier series relative to the eccentric longitude. The classical averaging technique’s usage results in the averaged trajectory depending only on a limited number of optimization parameters. Moreover, when transferring between near-circular orbits, the averaged motion can be estimated using analytical formulas. As such, the optimal multiorbit flight problem is simplified to nonlinear programming with fewer parameters, thereby accelerating the optimal solution’s derivation. Two practical examples illustrate the technique’s application: orbital transfer near the geostationary orbit and circular orbit raising maneuver. The solutions derived are compared with Pontryagin extremals.
Full article
►▼
Show Figures
Open AccessArticle
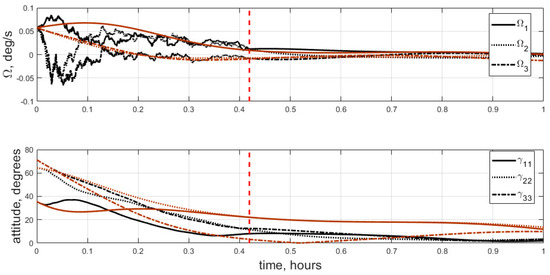
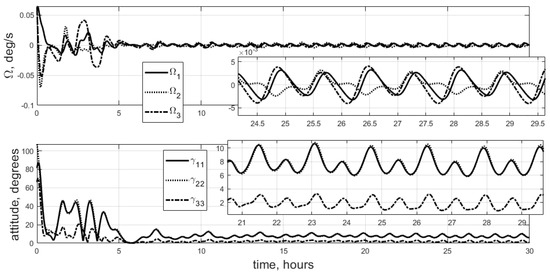
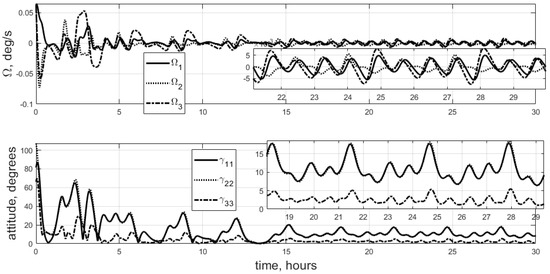
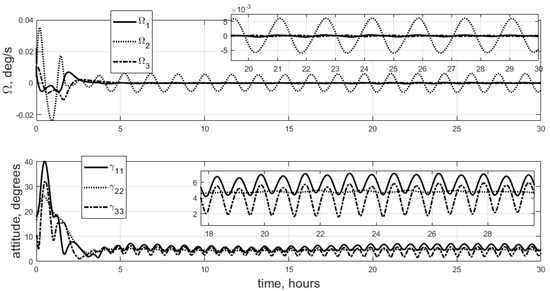
Comparison of Feedback Three-Axis Magnetic Attitude Control Strategies
by
Dmitry Roldugin, Anna Okhitina, Uliana Monakhova and Mikhail Ovchinnikov
Cited by 1 | Viewed by 1160
Abstract
In this article, five feedback magnetic attitude control algorithms are compared in terms of stabilization accuracy and implementation problems. The control strategies are classic Lyapunov control with scalar gain; the same control strategy with matrix gain and a specific gain-tuning procedure; sliding control
[...] Read more.
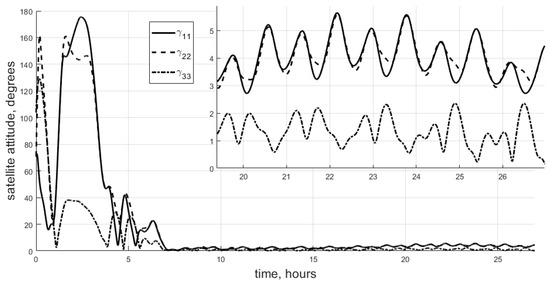
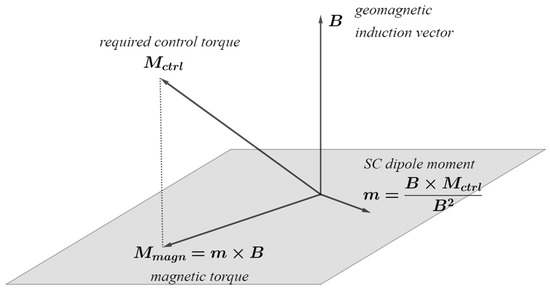
In this article, five feedback magnetic attitude control algorithms are compared in terms of stabilization accuracy and implementation problems. The control strategies are classic Lyapunov control with scalar gain; the same control strategy with matrix gain and a specific gain-tuning procedure; sliding control with a variable surface; a linear quadratic regulator constructed for a special time-invariant system of a higher degree than the initial time-varying system; and a special controllable trajectory developed using particle swarm optimization. A new sliding surface construction method is proposed in this paper. Surface parameters were changed in every control iteration to ensure that the required control torque component along the geomagnetic induction vector was small. The advantages and drawbacks of the considered methods and their applicability for different target attitudes are discussed.
Full article
►▼
Show Figures
Open AccessArticle
Earth-Venus Mission Analysis via Weak Capture and Nonlinear Orbit Control
by
Giulio De Angelis, Stefano Carletta, Mauro Pontani and Paolo Teofilatto
Viewed by 1861
Abstract
Exploration of Venus is recently driven by the interest of the scientific community in understanding the evolution of Earth-size planets, and is leading the implementation of missions that can benefit from new design techniques and technology. In this work, we investigate the possibility
[...] Read more.
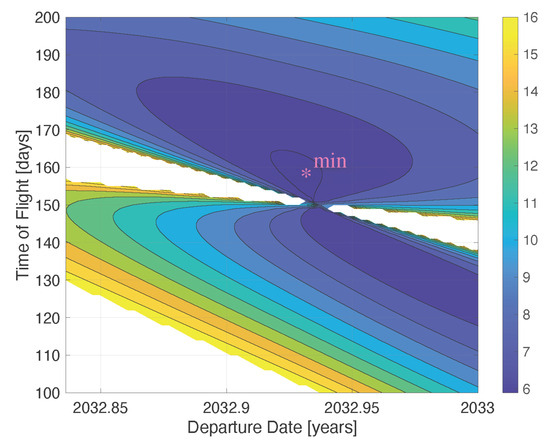
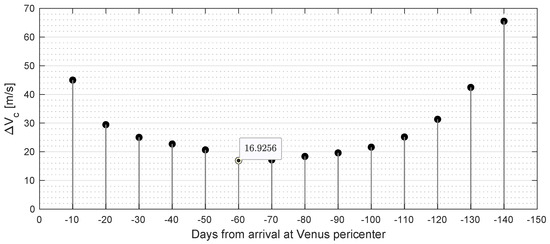
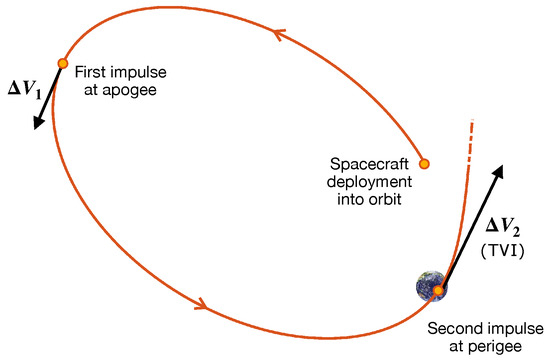
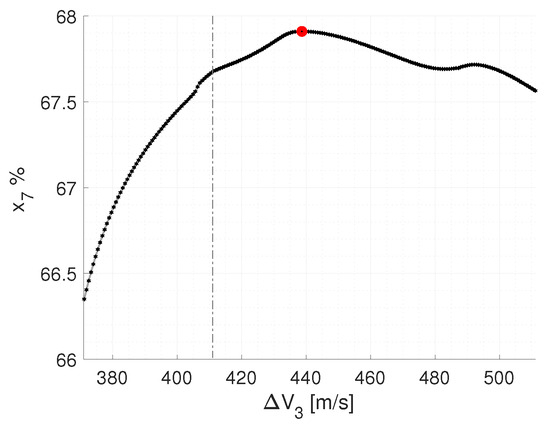
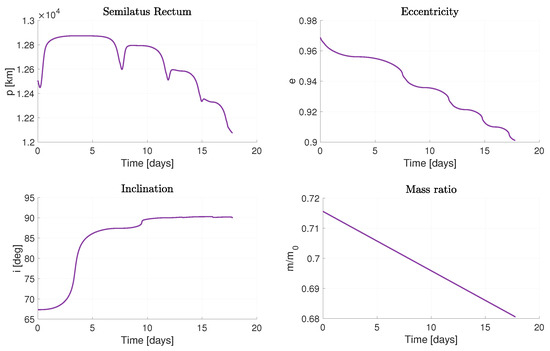
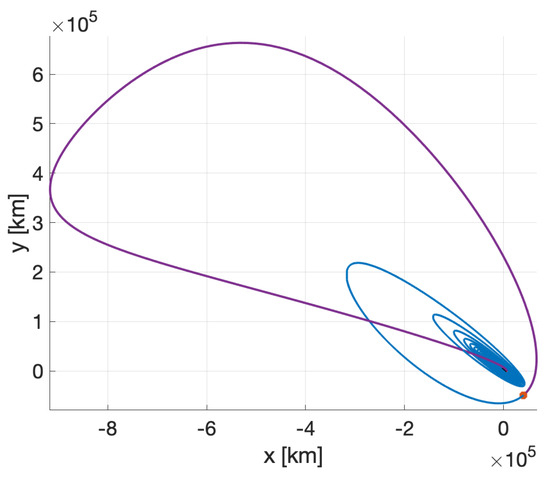
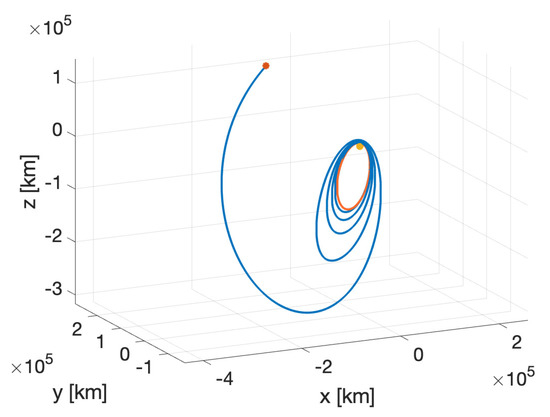
Exploration of Venus is recently driven by the interest of the scientific community in understanding the evolution of Earth-size planets, and is leading the implementation of missions that can benefit from new design techniques and technology. In this work, we investigate the possibility to implement a microsatellite exploration mission to Venus, taking advantage of (i) weak capture, and (ii) nonlinear orbit control. This research considers the case of a microsatellite, equipped with a high-thrust and a low-thrust propulsion system, and placed in a highly elliptical Earth orbit, not specifically designed for the Earth-Venus mission of interest. In particular, to minimize the propellant mass, phase (i) of the mission was designed to inject the microsatellite into a low-energy capture around Venus, at the end of the interplanetary arc. The low-energy capture is designed in the dynamical framework of the circular restricted 3-body problem associated with the Sun-Venus system. Modeling the problem with the use of the Hamiltonian formalism, capture trajectories can be characterized based on their state while transiting in the equilibrium region about the collinear libration point L1. Low-energy capture orbits are identified that require the minimum velocity change to be established. These results are obtained using the General Mission Analysis Tool, which implements planetary ephemeris. After completing the ballistic capture, phase (ii) of the mission starts, and it is aimed at driving the microsatellite toward the operational orbit about Venus. The transfer maneuver is based on the use of low-thrust propulsion and nonlinear orbit control. Convergence toward the desired operational orbit is investigated and is proven analytically using the Lyapunov stability theory, in conjunction with the LaSalle invariance principle, under certain conditions related to the orbit perturbing accelerations and the low-thrust magnitude. The numerical results prove that the mission profile at hand, combining low-energy capture and low-thrust nonlinear orbit control, represents a viable and effective strategy for microsatellite missions to Venus.
Full article
►▼
Show Figures
Open AccessArticle
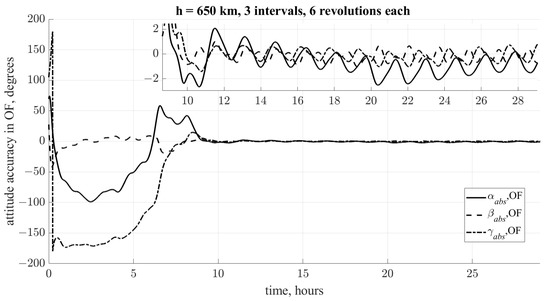
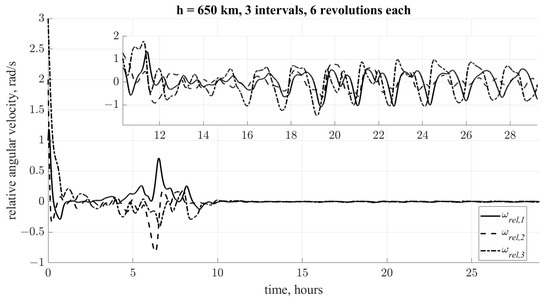
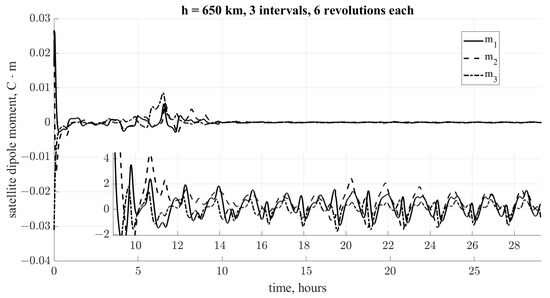
Comparative Cost Functions Analysis in the Construction of a Reference Angular Motion Implemented by Magnetorquers
by
Anna Okhitina, Stepan Tkachev and Dmitry Roldugin
Cited by 1 | Viewed by 1238
Abstract
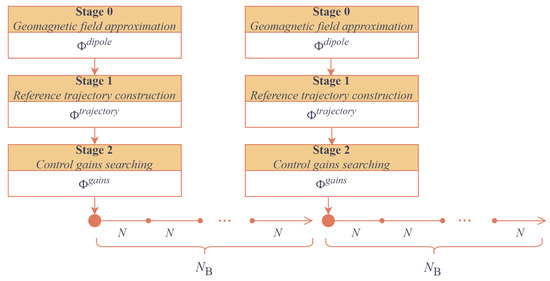
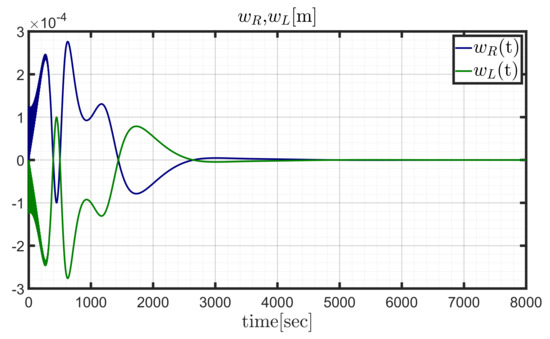
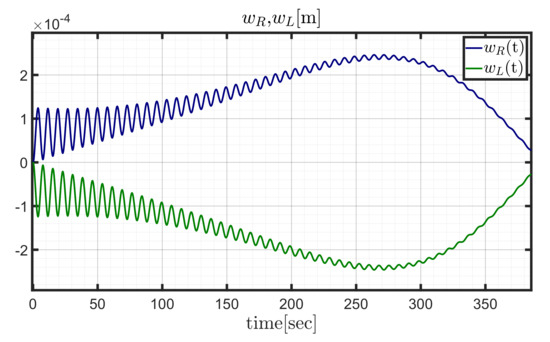
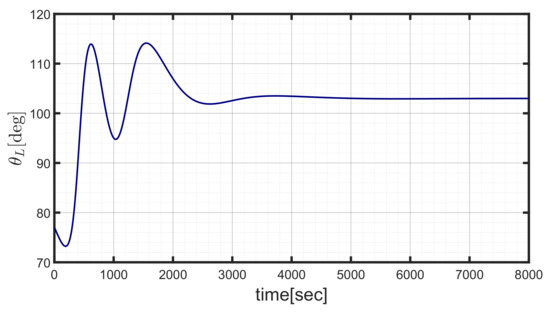
This paper considers a construction procedure of a satellite reference angular motion in the vicinity of an unstable gravitational equilibrium position. The satellite is stabilized on the reference trajectory by the magnetic coils. The problem is solved in several stages. An optimization problem
[...] Read more.
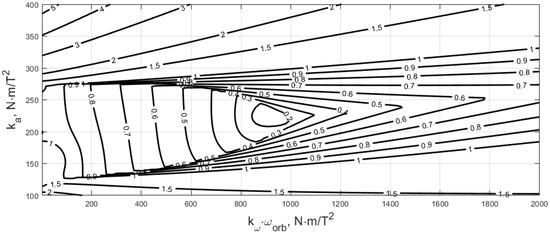
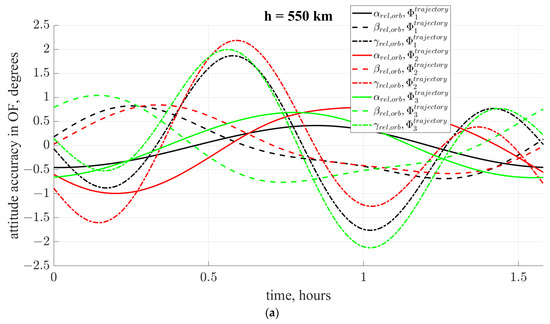
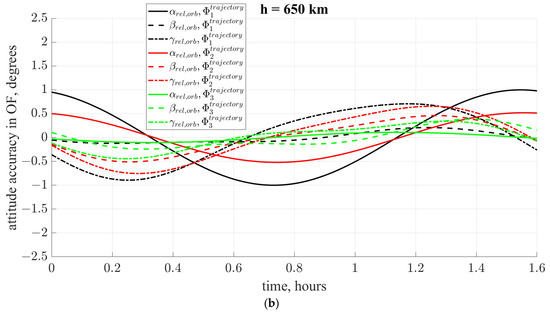
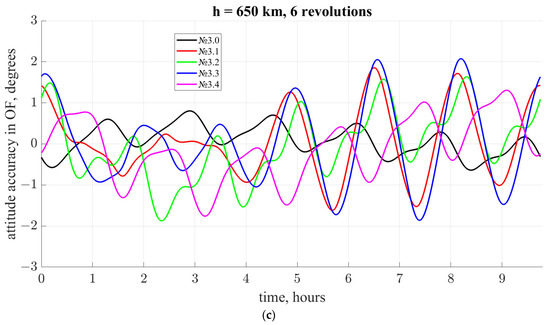
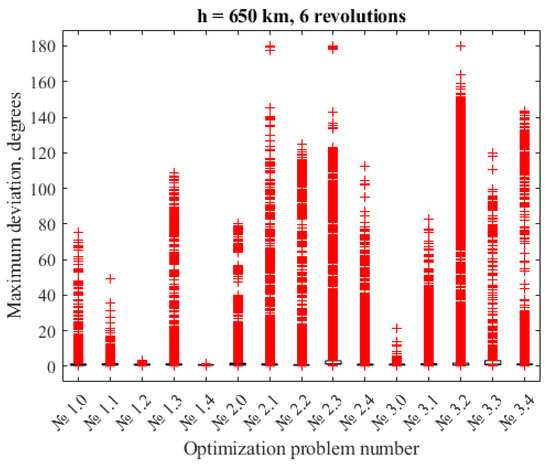
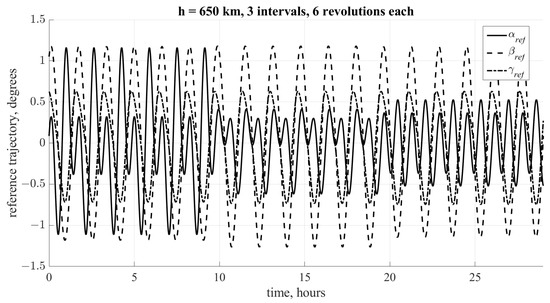
This paper considers a construction procedure of a satellite reference angular motion in the vicinity of an unstable gravitational equilibrium position. The satellite is stabilized on the reference trajectory by the magnetic coils. The problem is solved in several stages. An optimization problem to be solved by the particle swarm optimization method is formulated at each stage. Cost functions are based on the linearized model analysis. The main stage is the construction of a special reference motion, which provides the minimum control torque projection on the geomagnetic induction vector. Optimal geomagnetic field dipole approximation for a given time interval is considered to reduce tracking errors. The paper compares combinations of different cost functions in terms of the terminal attitude accuracy in the presence of perturbations.
Full article
►▼
Show Figures
Open AccessArticle
End-to-End Optimization of Power-Limited Earth–Moon Trajectories
by
Viacheslav Petukhov and Sung Wook Yoon
Cited by 3 | Viewed by 1788
Abstract
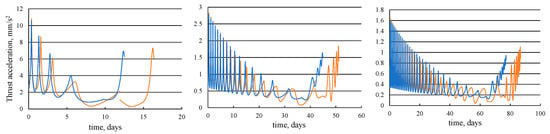
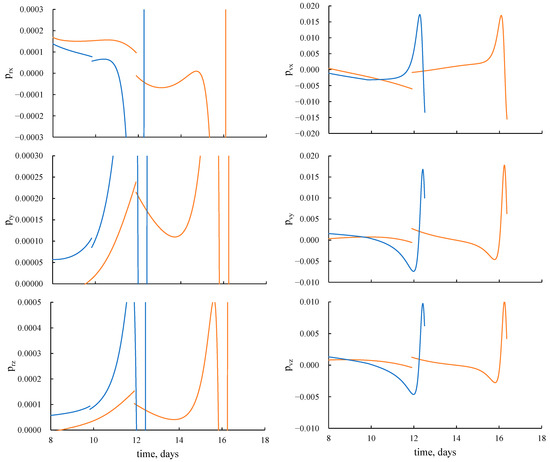
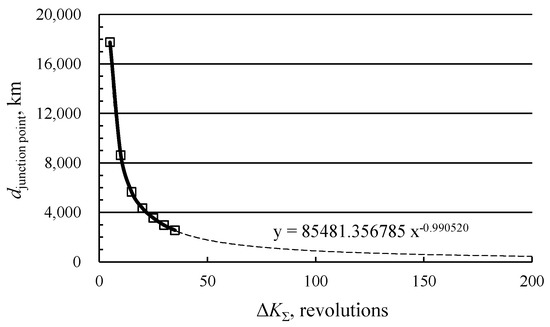
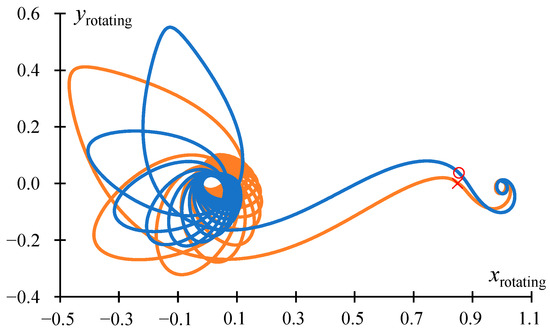
The aim of this study is to analyze lunar trajectories with the optimal junction point of geocentric and selenocentric segments. The major motivation of this research is to answer two questions: (1) how much of the junction of the trajectory segments at the
[...] Read more.
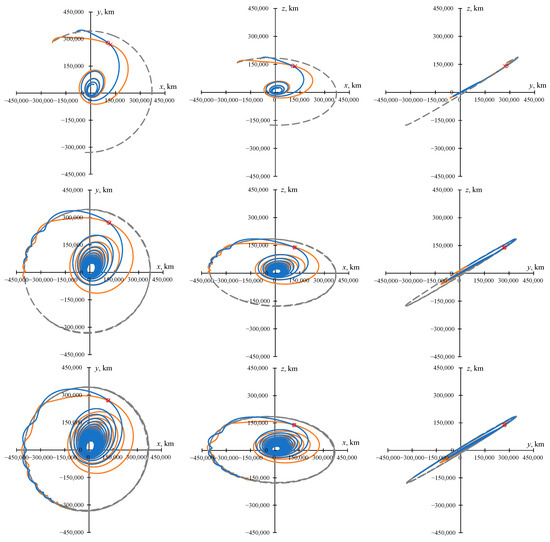
The aim of this study is to analyze lunar trajectories with the optimal junction point of geocentric and selenocentric segments. The major motivation of this research is to answer two questions: (1) how much of the junction of the trajectory segments at the libration point between the Earth and the Moon is non-optimal? and (2) how much can the trajectory be improved by optimizing the junction point of the two segments? The formulation of the end-to-end optimization problem of power-limited trajectories to the Moon and a description of the method of its solution are given. The proposed method is based on the application of the maximum principle and continuation method. Canonical transformation is used to transform the costate variables between geocentric and selenocentric coordinate systems. For the initial guess, a collinear libration point between the Earth and the Moon is used as a junction point, and the transformation to the optimal junction of these segments is carried out using the continuation method. The developed approach does not require any user-supplied initial guesses. It provides the computation of the optimal transfer duration for trajectories with a given angular distance and facilitates the incorporation of the perturbing accelerations in the mathematical model. Numerical examples of low-thrust trajectories from an elliptical Earth orbit to a circular lunar orbit considering a four-body ephemeris model are given, and a comparison is made between the trajectories with an optimal junction point and the trajectories with a junction of geocentric and selenocentric segments at the libration point.
Full article
►▼
Show Figures
Open AccessArticle
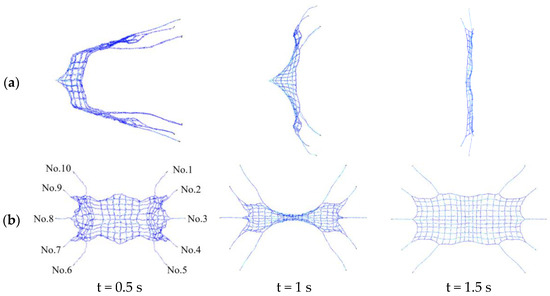
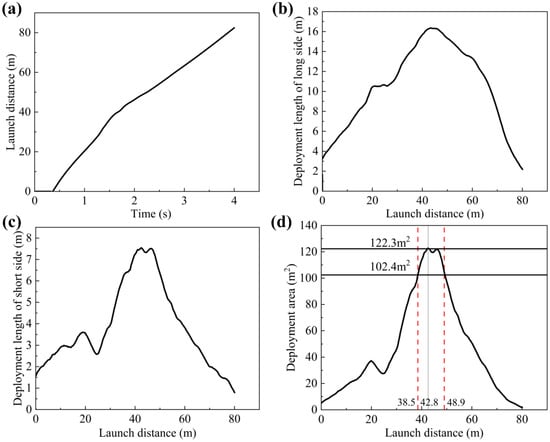
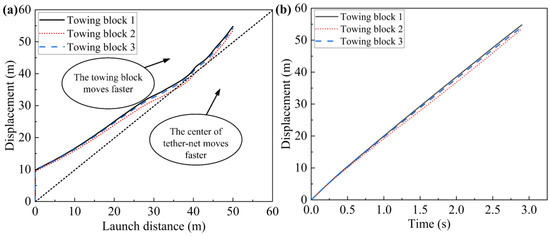
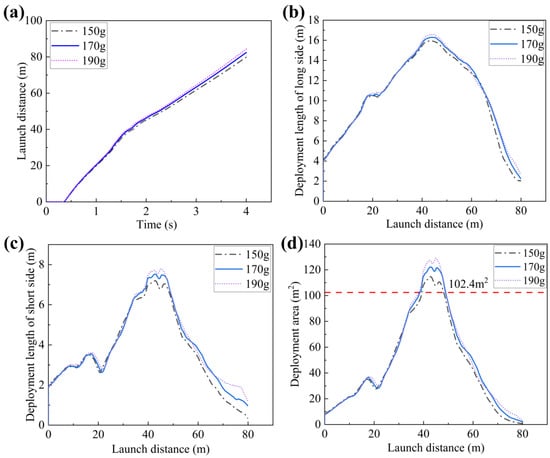
Parameter Analysis and Experiment Validation of Deployment Characteristics of a Rectangular Tether-Net
by
Shuai Yue, Mengsheng Li, Zhen Zhao, Zhonghua Du, Chunbo Wu and Qingzhan Zhang
Cited by 6 | Viewed by 1801
Abstract
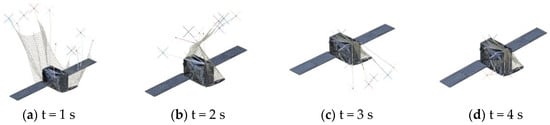
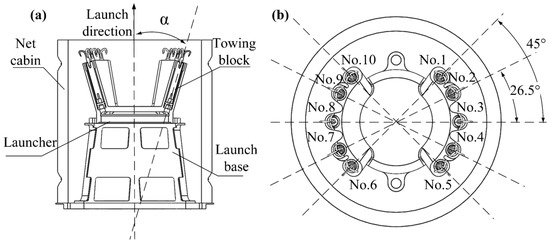
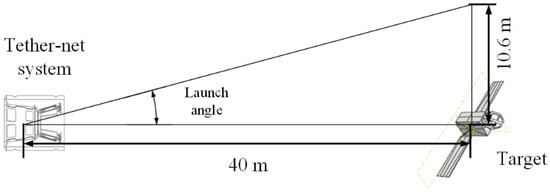
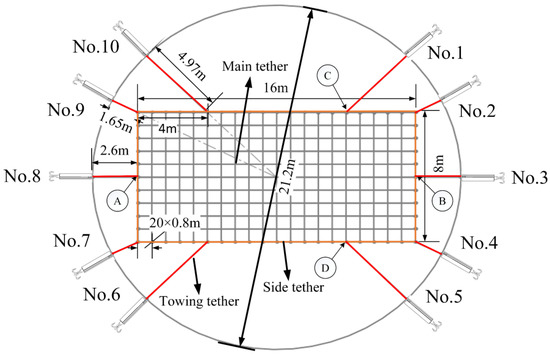
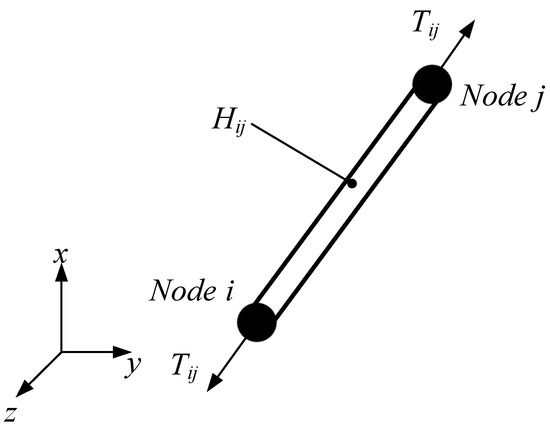
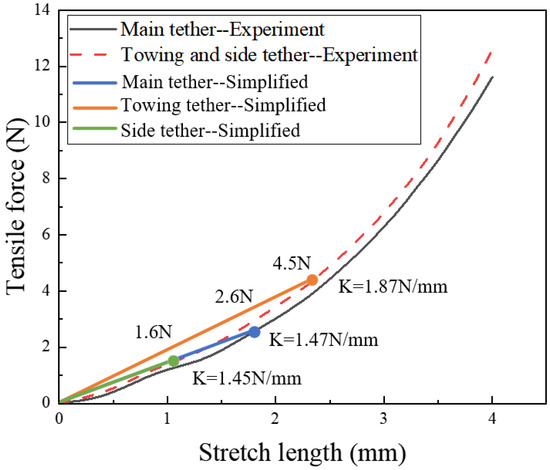
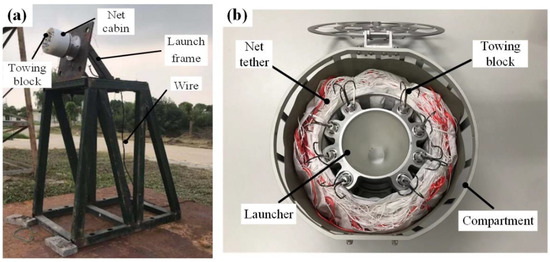
Tether-nets in space applications are flexible capture systems for removing space debris. A new, low-mass, rectangular tether-net deployed by ten towing blocks is proposed in this paper for the purpose of capturing the main body of satellites. The dynamic model of a rectangular
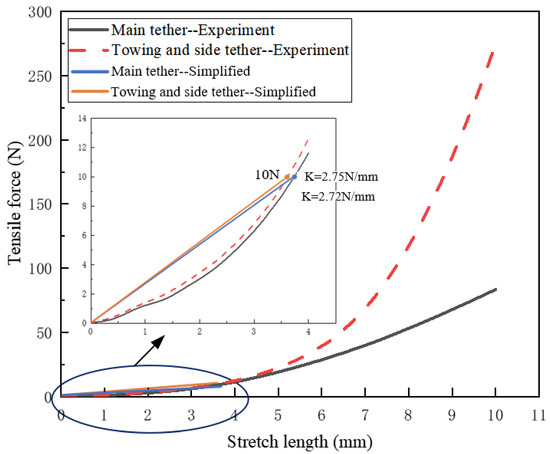
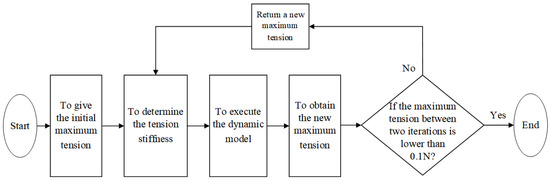
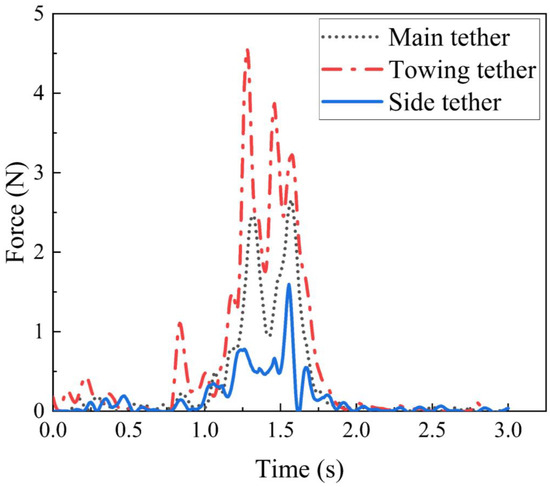
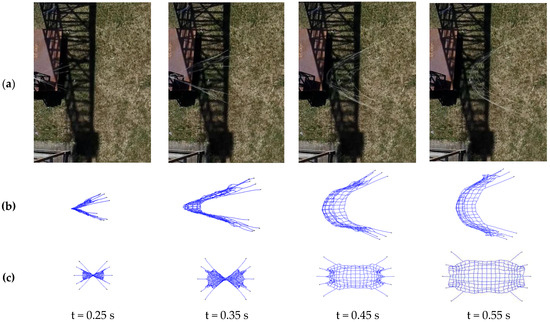
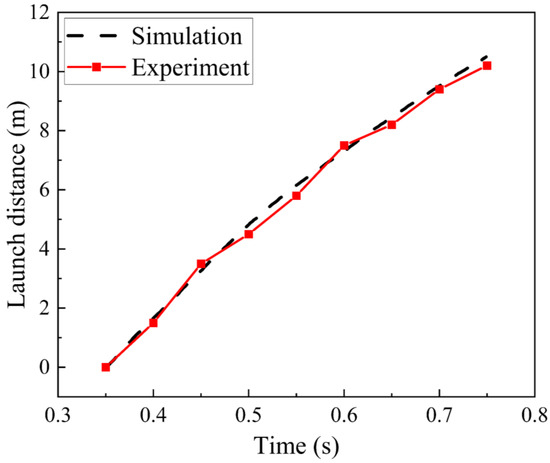
[...] Read more.
Tether-nets in space applications are flexible capture systems for removing space debris. A new, low-mass, rectangular tether-net deployed by ten towing blocks is proposed in this paper for the purpose of capturing the main body of satellites. The dynamic model of a rectangular tether-net during the deployment process was established. The accuracy of the simulation model was validated by comparing it with on-ground experiments. In addition, the influence of towing block mass and launch speed on the maximum deployment area and the deployment lengths of the long side and short side of the rectangular tether-net were systematically analyzed. The results show that the tether-net configuration and launch distance of the simulations were consistent with those of the experiments, demonstrating the good accuracy of the simulation model. Moreover, with the increase in towing block mass, the maximum deployment area and deployment lengths of both sides of the rectangular tether-net showed a gradually increasing tendence, while the recoil impulse and structural weight increased. When the launch speed of the towing blocks increased, the maximum deployment area and deployment lengths increased significantly and further caused the extension of the shape-preserving distance.
Full article
►▼
Show Figures
Open AccessArticle
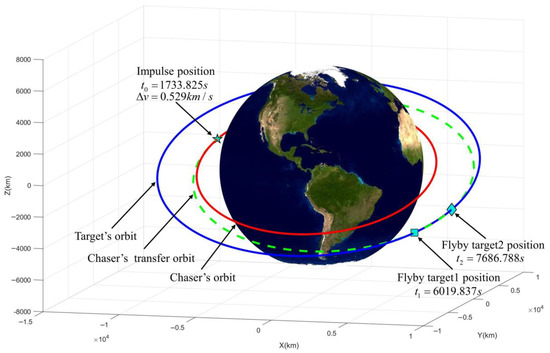
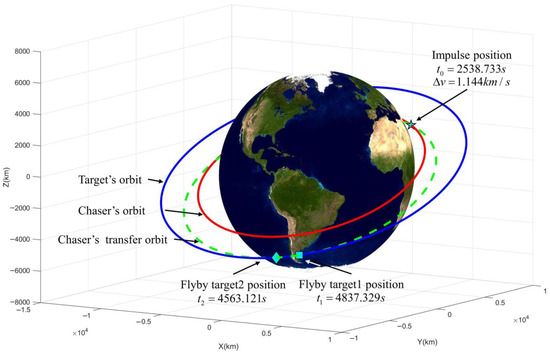
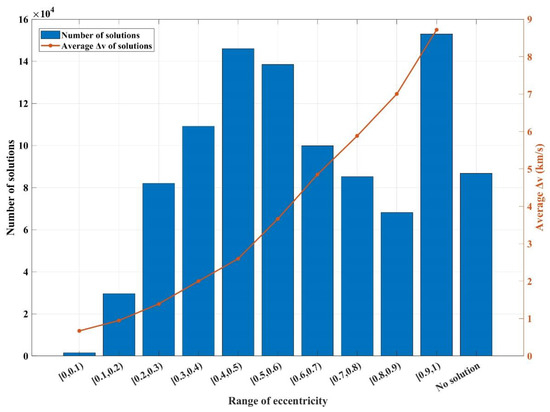
Numerical Solution for the Single-Impulse Flyby Co-Orbital Spacecraft Problem
by
Haoxiang Su, Zhenghong Dong, Lihao Liu and Lurui Xia
Cited by 3 | Viewed by 2547
Abstract
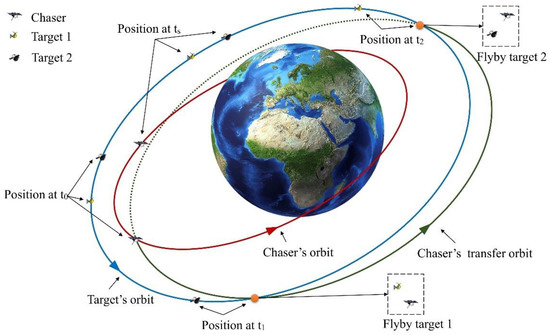
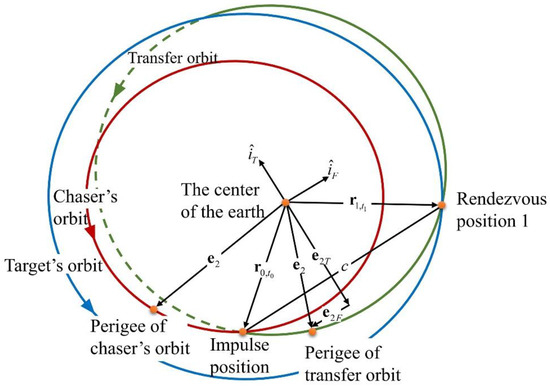
The traversal inspection of satellites in satellite constellations or geosynchronous orbits has been a focus of research. A large number of variable orbit requirements in the “single-to-single” mode severely affects the efficiency of inspections. To address this problem, this study investigated the problem
[...] Read more.
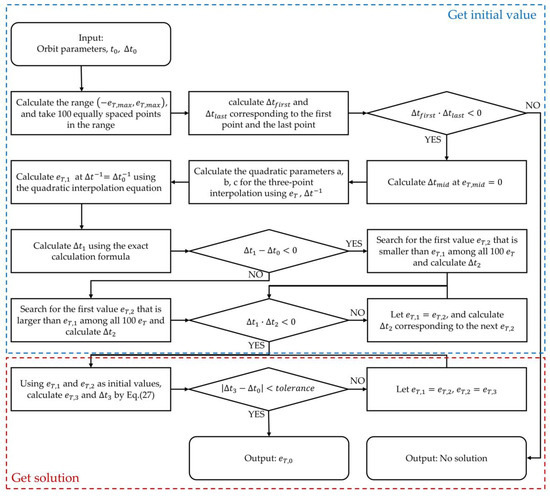
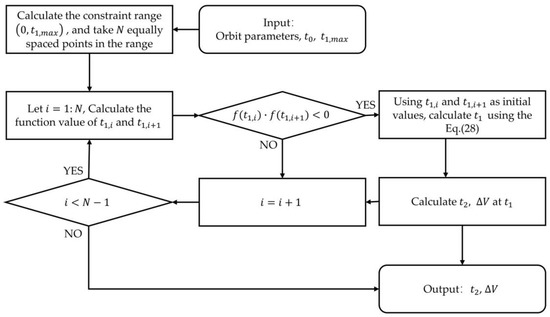
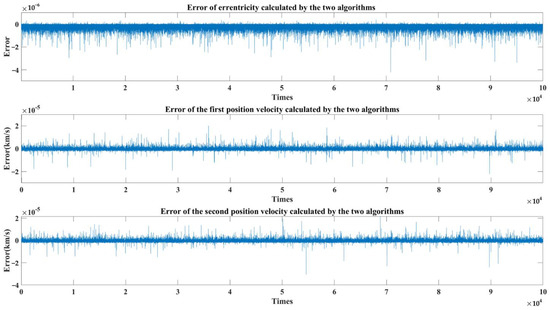
The traversal inspection of satellites in satellite constellations or geosynchronous orbits has been a focus of research. A large number of variable orbit requirements in the “single-to-single” mode severely affects the efficiency of inspections. To address this problem, this study investigated the problem of a single-impulse flyby co-orbiting two spacecraft and proposed a derivative-free numerical solution method that used the geometric relationship between the two intersections of the target and transfer orbits of the flyby problem in order to transform them into a nonlinear equation in a single variable for a given impulse time. The validity of the proposed method was verified using numerical examples. While the Lambert problem is one of the bases for solving the variable orbit problem, on-star intelligent control also raises the requirements for speed. To address this problem, this study also investigated the Lambert problem in a single-impulse flyby co-orbiting two spacecraft and determined the iterative initial value by constructing a quadratic interpolation equation between the inverse of the transfer time and the vertical component of the eccentric vector, the derivative-free quadratic interpolation cut-off method was proposed. Using 100,000 random tests showed that computational efficiency was improved by more than one order of magnitude compared with commonly used methods, with a calculation error of less than 10
−6.
Full article
►▼
Show Figures
Open AccessArticle
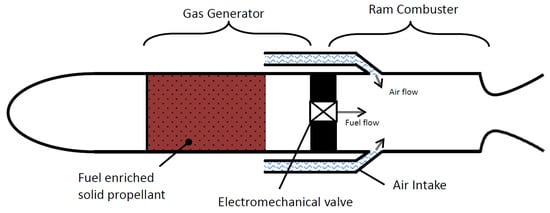
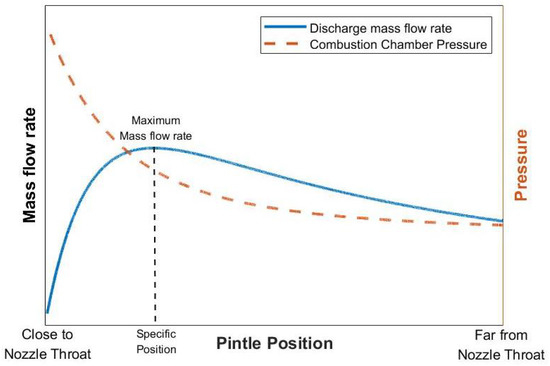
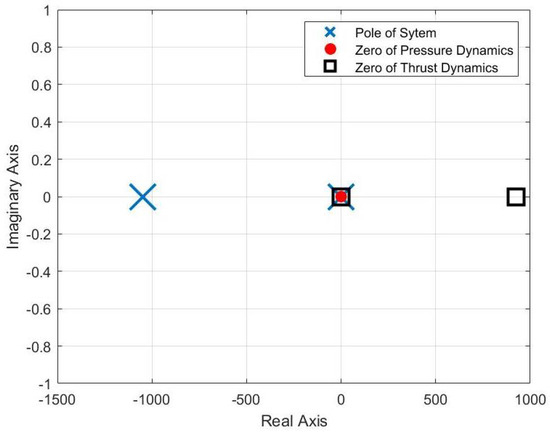
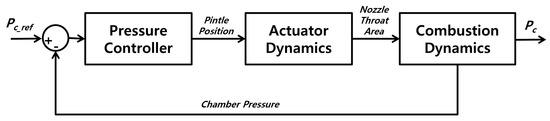
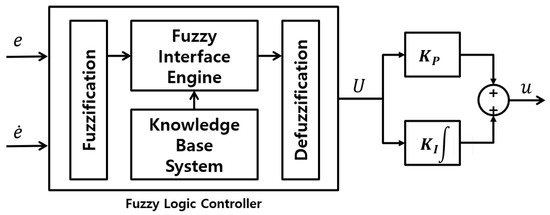
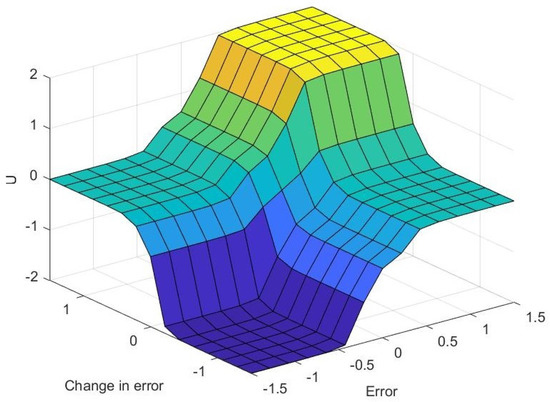
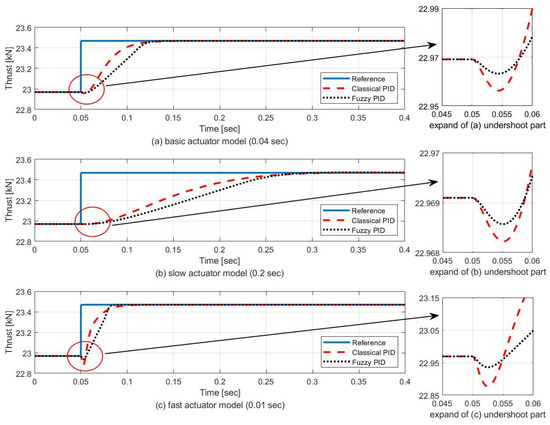
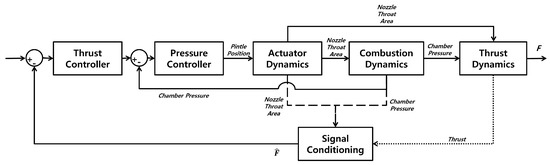
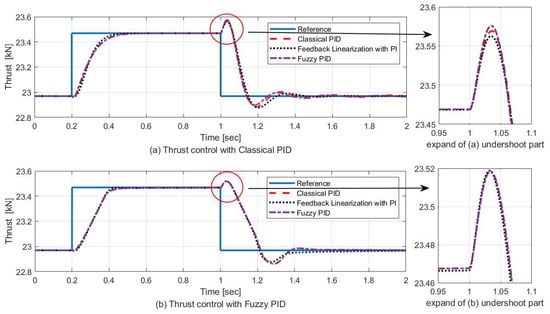
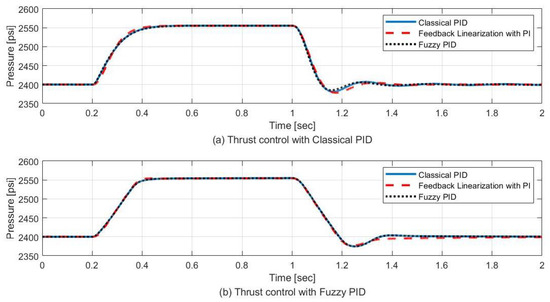
Performance Comparison of Control Strategies for a Variable-Thrust Solid-Propellant Rocket Motor
by
Jihyoung Cha and Élcio Jeronimo de Oliveira
Cited by 7 | Viewed by 5846
Abstract
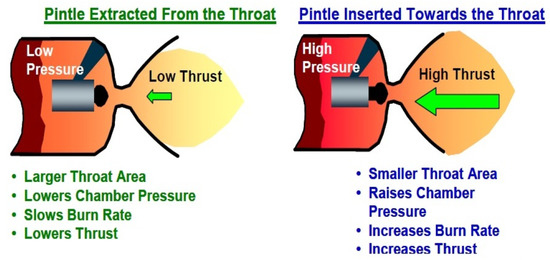
This paper deals with a performance comparison of the control algorithm for a variable-thrust solid-propellant rocket motor (VTSRM). To do this, we develop a simulation model of a VTSRM considering characteristic changes in the combustor and design control systems for pressure and thrust.
[...] Read more.
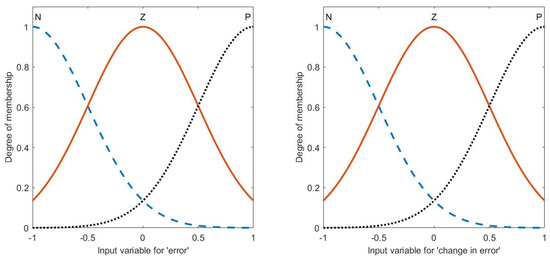
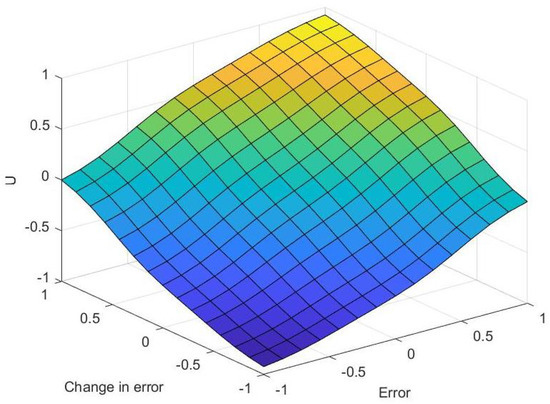
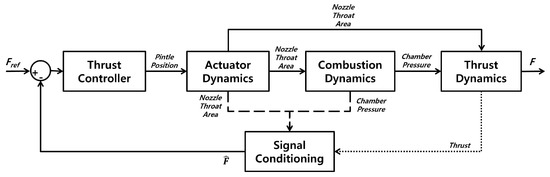
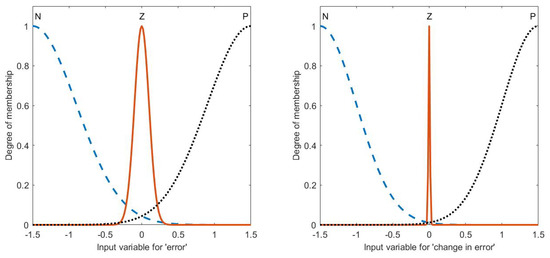
This paper deals with a performance comparison of the control algorithm for a variable-thrust solid-propellant rocket motor (VTSRM). To do this, we develop a simulation model of a VTSRM considering characteristic changes in the combustor and design control systems for pressure and thrust. We use three types of control algorithms for the pressure control: classical PID control, feedback linearization control, and fuzzy PID control, and two control algorithms for thrust control: classical PID control and fuzzy PID control. Finally, we compare the performance of each control system through a numerical simulation using step responses. Through this work, we check that feedback linearization is better in pressure control, and fuzzy PID control is more appropriate in thrust control. Especially using fuzzy PID control, we can get fast settling with a small undershoot even if the system is a nonminimum phase system.
Full article
►▼
Show Figures
Open AccessArticle
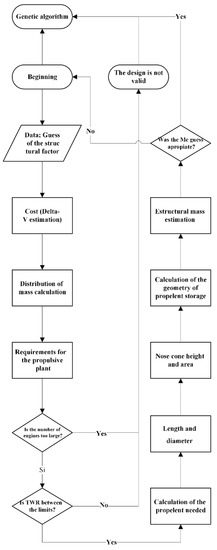
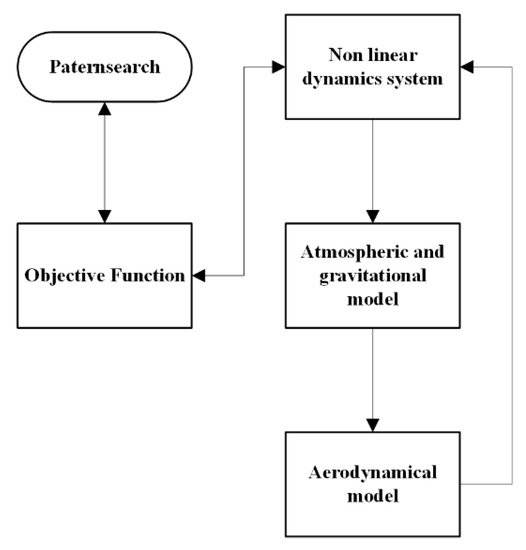
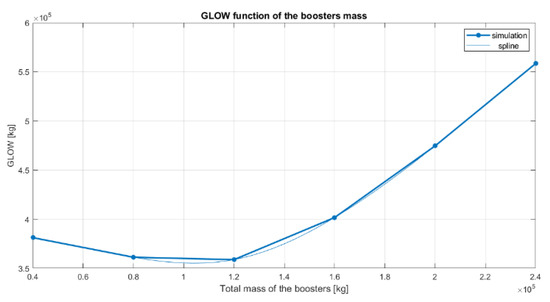
Optimization of the Conceptual Design of a Multistage Rocket Launcher
by
Pedro Orgeira-Crespo, Guillermo Rey, Carlos Ulloa, Uxia Garcia-Luis, Pablo Rouco and Fernando Aguado-Agelet
Cited by 5 | Viewed by 5773
Abstract
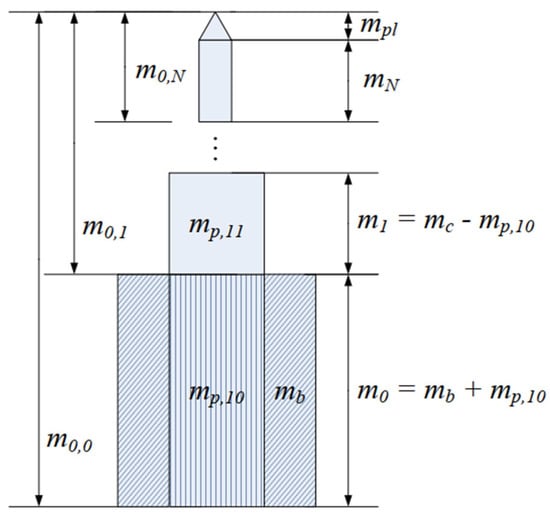
The design of a vehicle launch comprises many factors, including the optimization of the climb path and the distribution of the mass in stages. The optimization process has been addressed historically from different points of view, using proprietary software solutions to obtain an
[...] Read more.
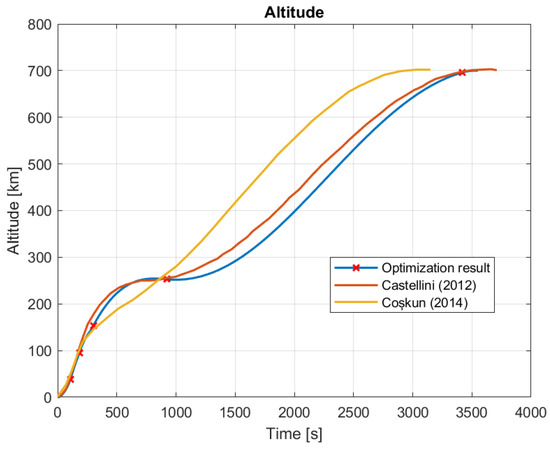
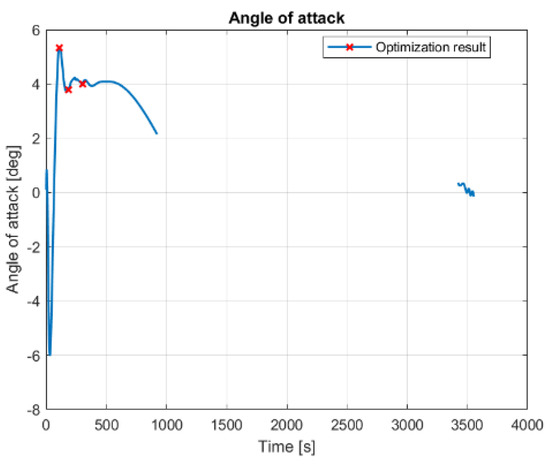
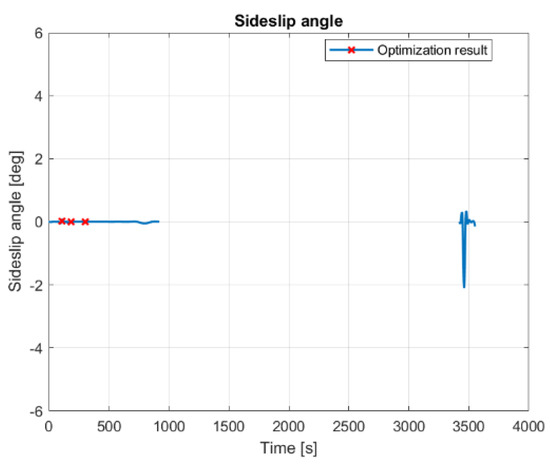
The design of a vehicle launch comprises many factors, including the optimization of the climb path and the distribution of the mass in stages. The optimization process has been addressed historically from different points of view, using proprietary software solutions to obtain an ideal mass distribution among stages. In this research, we propose software for the separate optimization of the trajectory of a launch rocket, maximizing the payload weight and the global design, while varying the power plant selection. The launch is mathematically modeled considering its propulsive, gravitational, and aerodynamical aspects. The ascent trajectory is optimized by discretizing the trajectory using structural and physical constraints, and the design accounts for the mass and power plant of each stage. The optimization algorithm is checked against various real rockets and other modeling algorithms, obtaining differences of up to 9%.
Full article
►▼
Show Figures
Open AccessArticle
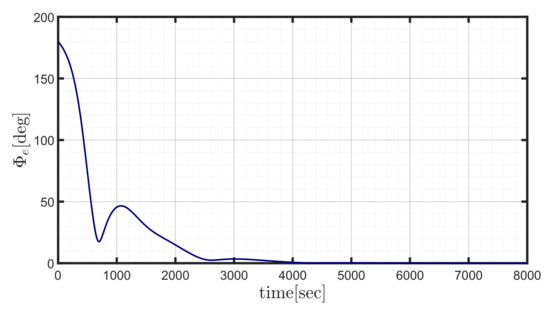
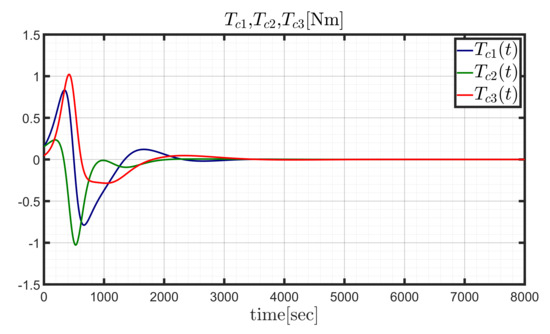
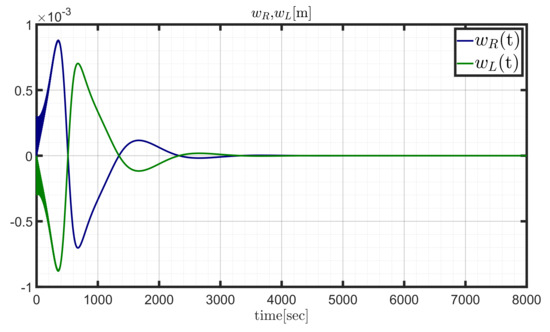
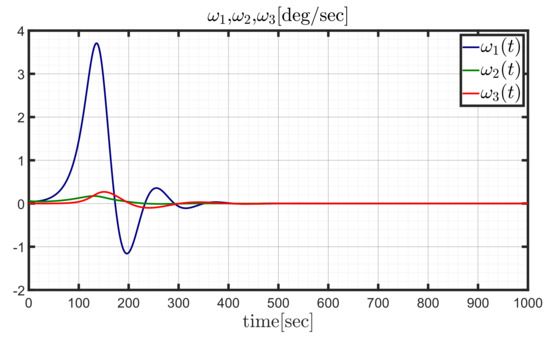
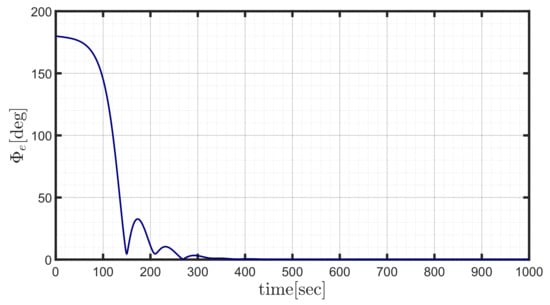
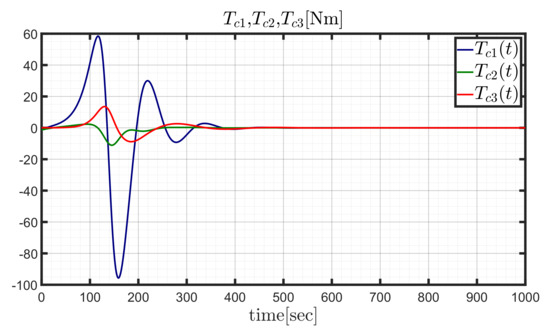
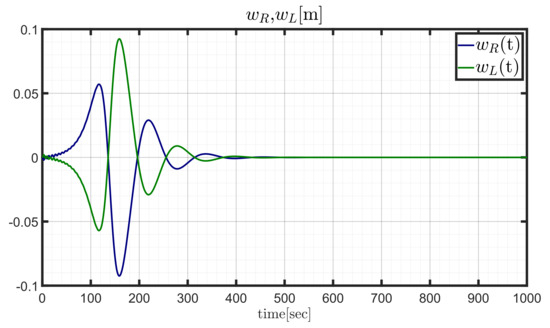
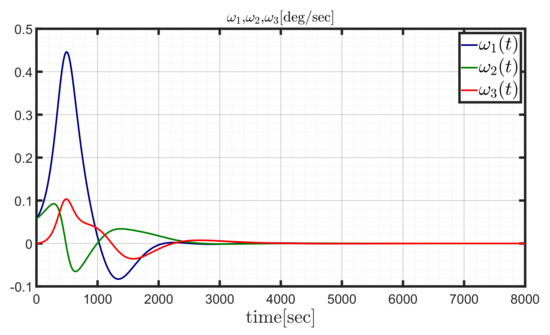
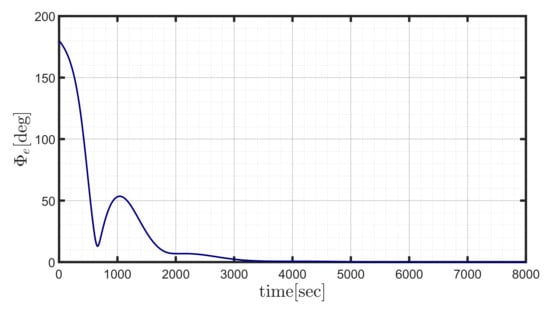
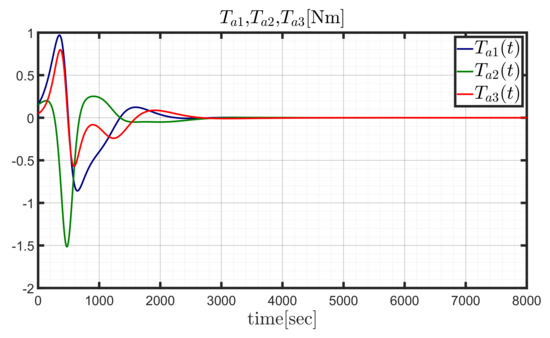
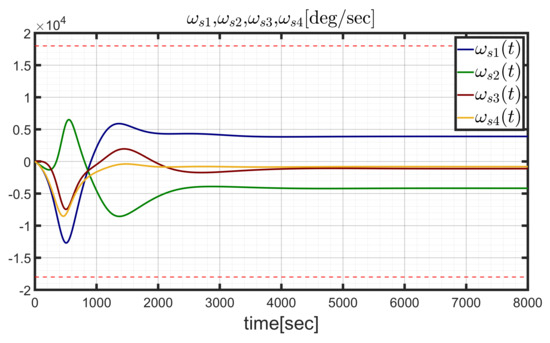
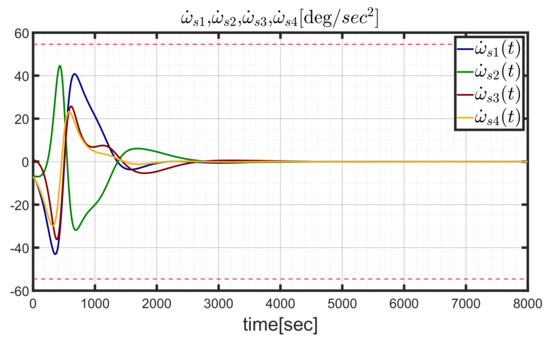
Nonlinear Slewing Control of a Large Flexible Spacecraft Using Reaction Wheels
by
Massimo Posani, Mauro Pontani and Paolo Gasbarri
Cited by 2 | Viewed by 3448
Abstract
Reorientation maneuvers represent a key task for large satellites. This work considers a space vehicle with solar panels and reaction wheels as actuation devices. Solar panels are modeled as flexural beams, using the modal decomposition technique. An inertia-free nonlinear attitude control algorithm, which
[...] Read more.
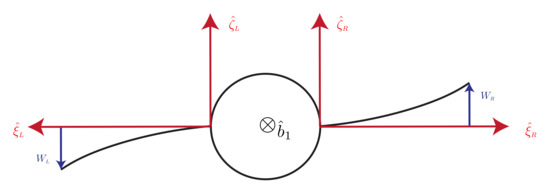
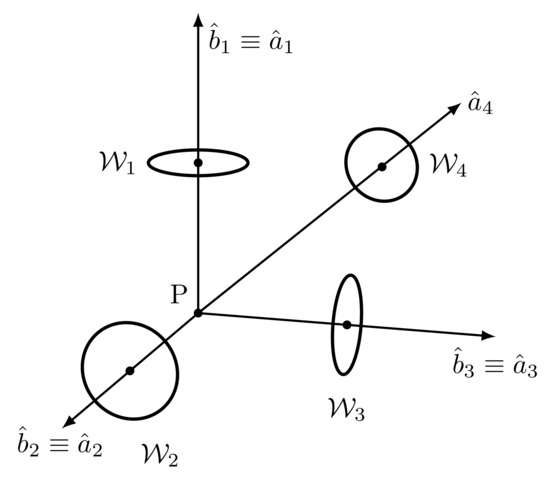
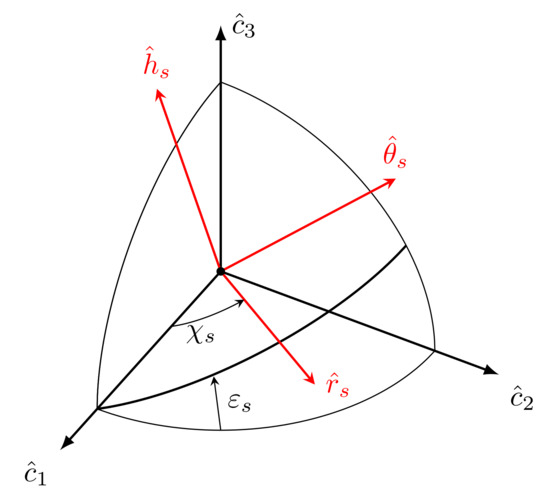
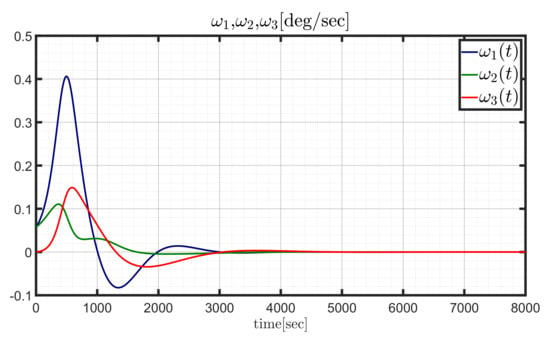
Reorientation maneuvers represent a key task for large satellites. This work considers a space vehicle with solar panels and reaction wheels as actuation devices. Solar panels are modeled as flexural beams, using the modal decomposition technique. An inertia-free nonlinear attitude control algorithm, which enjoys quasi-global stability properties, is employed for the numerical simulation of a large reorientation maneuver. Preliminary analysis with ideal actuation allows sizing the control system and identifying the expected elastic displacements. Then, the actuation dynamics is included, and the actual torque transferred to the vehicle no longer coincides with the commanded one, supplied by the nonlinear control algorithm. Moreover, the solar panels are designed to rotate, in order to maximize the power storage during the maneuver. The numerical results prove that the slewing maneuver is successfully completed in reasonable time and without any saturation of the actuation devices, while the elastic displacements remain modest, in spite of the solar panel rotation aimed at pursuing the Sun direction.
Full article
►▼
Show Figures
Open AccessArticle
Characterization of Low-Energy Quasiperiodic Orbits in the Elliptic Restricted 4-Body Problem with Orbital Resonance
by
Stefano Carletta, Mauro Pontani and Paolo Teofilatto
Cited by 8 | Viewed by 2484
Abstract
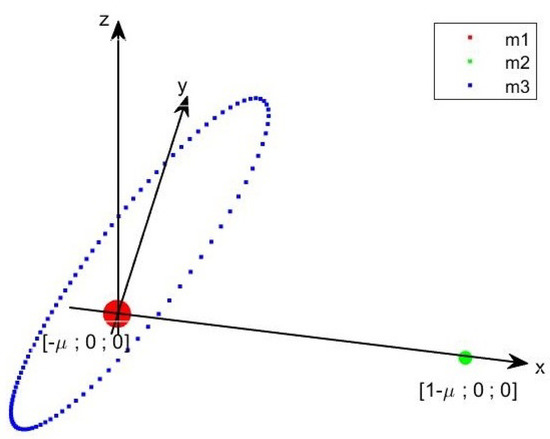
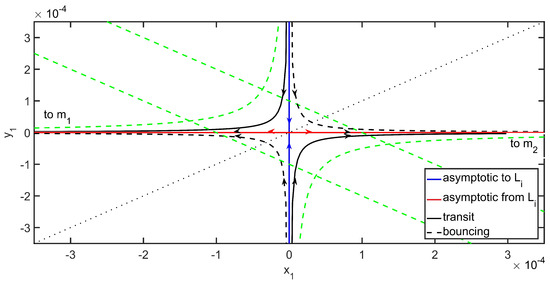
In this work, we investigate the behavior of low-energy trajectories in the dynamical framework of the spatial elliptic restricted 4-body problem, developed using the Hamiltonian formalism. Introducing canonical transformations, the Hamiltonian function in the neighborhood of the collinear libration point
(or
[...] Read more.
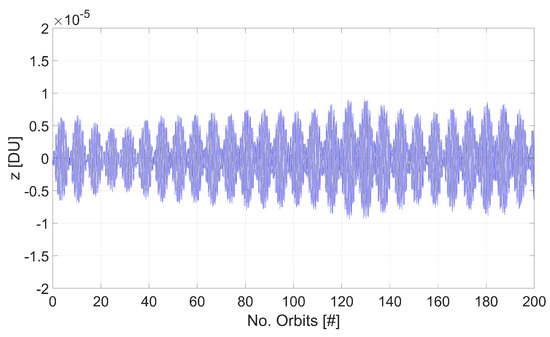
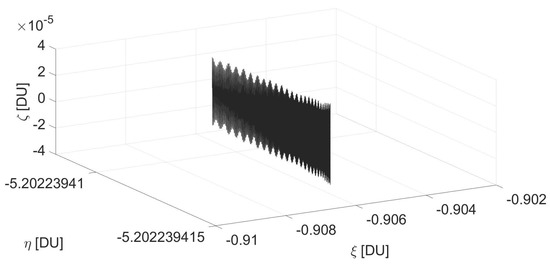
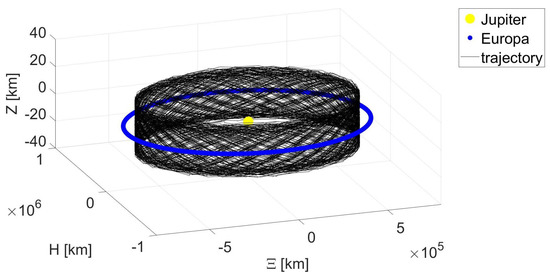
In this work, we investigate the behavior of low-energy trajectories in the dynamical framework of the spatial elliptic restricted 4-body problem, developed using the Hamiltonian formalism. Introducing canonical transformations, the Hamiltonian function in the neighborhood of the collinear libration point
(or
), can be expressed as a sum of three second order local integrals of motion, which provide a compact topological description of low-energy transits, captures and quasiperiodic libration point orbits, plus higher order terms that represent perturbations. The problem of small denominators is then applied to the order three of the transformed Hamiltonian function, to identify the effects of orbital resonance of the primaries onto quasiperiodic orbits. Stationary solutions for these resonant terms are determined, corresponding to quasiperiodic orbits existing in the presence of orbital resonance. The proposed model is applied to the Jupiter-Europa-Io system, determining quasiperiodic orbits in the surrounding of Jupiter-Europa
considering the 2:1 orbital resonance between Europa and Io.
Full article
►▼
Show Figures
Open AccessArticle
A Parallelized Genetic Algorithm to Evaluate Asteroid Impact Missions Using Electric Propulsion
by
Kamesh Sankaran, Scott A. Griffith, Noah C. Thompson, Matthew D. Lochridge and Andrew S. O’Kins
Cited by 1 | Viewed by 2578
Abstract
A streamlined genetic algorithm was developed and implemented on a GPU to evaluate low-thrust trajectories of spacecraft propelled by an ion thruster. It was then applied to examine the utility of a specific thruster for an asteroid impact mission. This method was validated
[...] Read more.
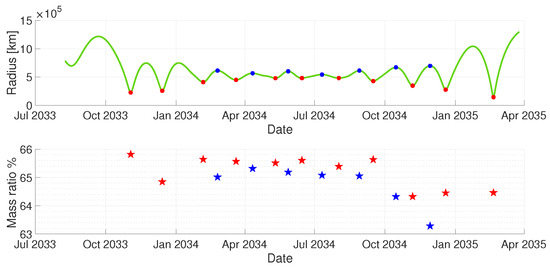
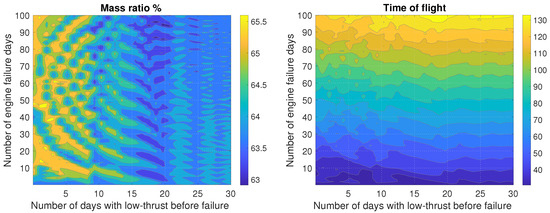
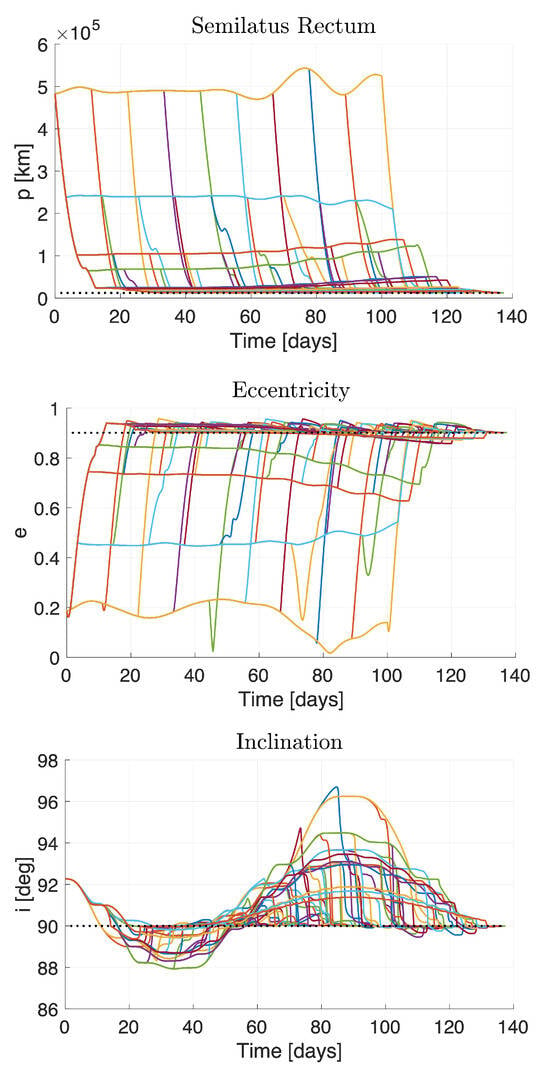
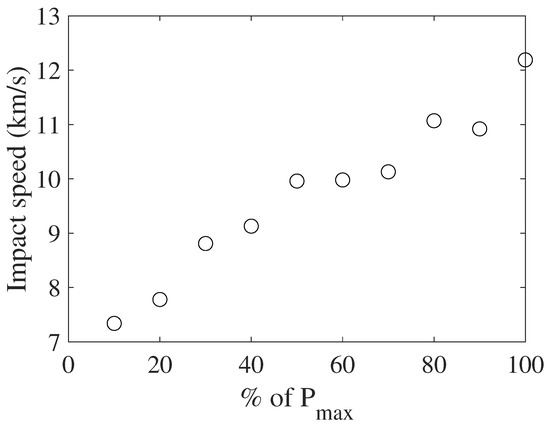
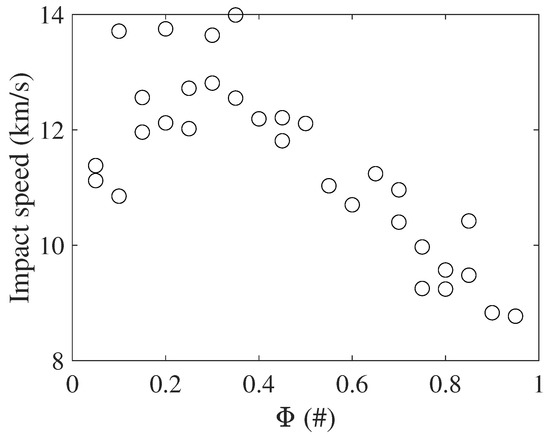
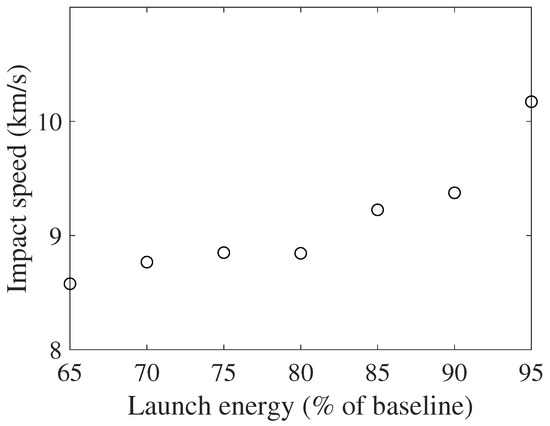
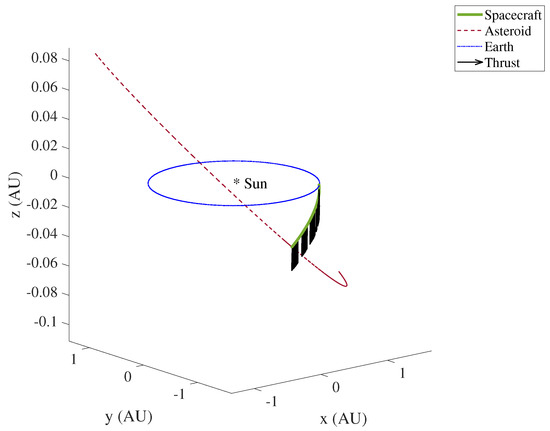
A streamlined genetic algorithm was developed and implemented on a GPU to evaluate low-thrust trajectories of spacecraft propelled by an ion thruster. It was then applied to examine the utility of a specific thruster for an asteroid impact mission. This method was validated by comparing impact speeds of non-thruster results with the DART mission, which does not significantly use the equipped ion thruster. Then, by utilizing the ion thruster for prolonged periods, this model demonstrated the possibility of significant increases in the impact speed and significant decreases in the trip times. This specific test case was used to examine the utility of the model and, by methodically varying relevant variables, this article shows the influence of the genetic algorithm on the results. By examining a range of electrical power levels, the results presented here provide hints as to the possible effects of spacecraft design trade-offs on impact speed. The analysis of the effects of the algorithm on the results and the evaluation of thruster operating parameters indicate the applicability of this model to a variety of spaceflight missions.
Full article
►▼
Show Figures
Open AccessArticle
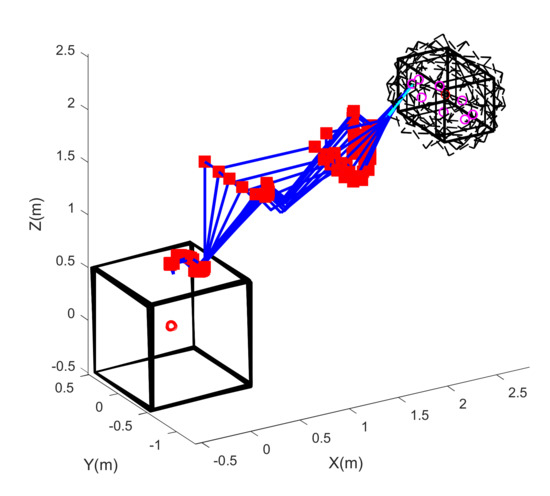
Configuration Optimization for Free-Floating Space Robot Capturing Tumbling Target
by
Long Zhang
Cited by 5 | Viewed by 3160
Abstract
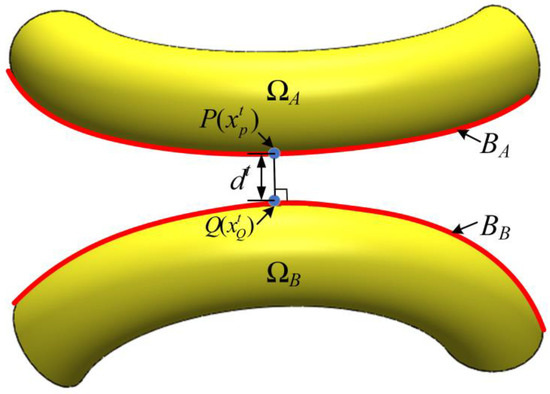
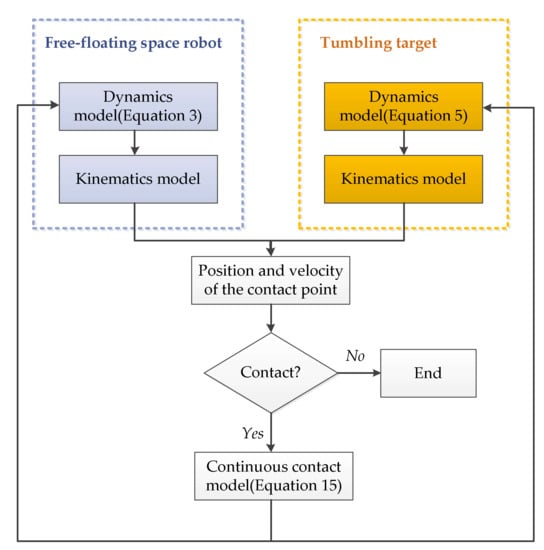
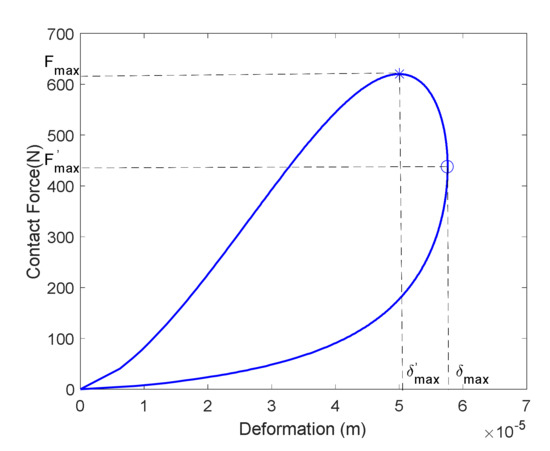
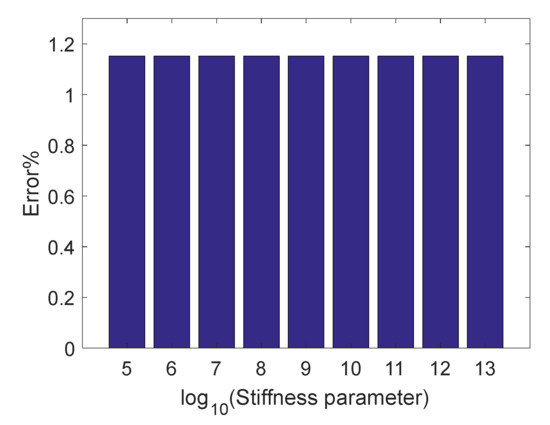
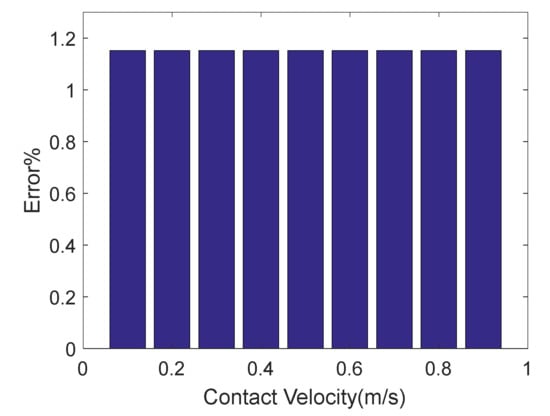
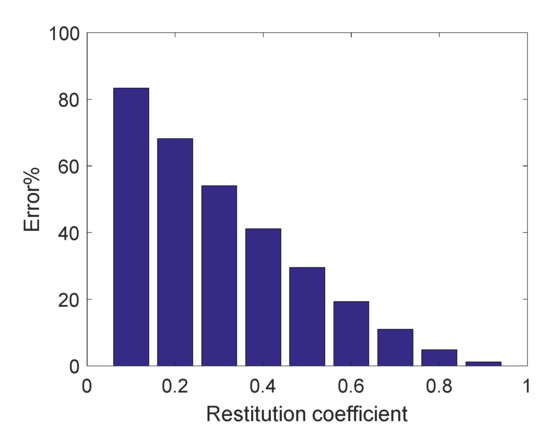
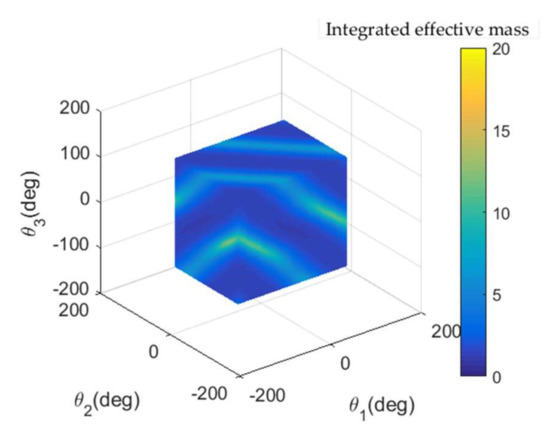
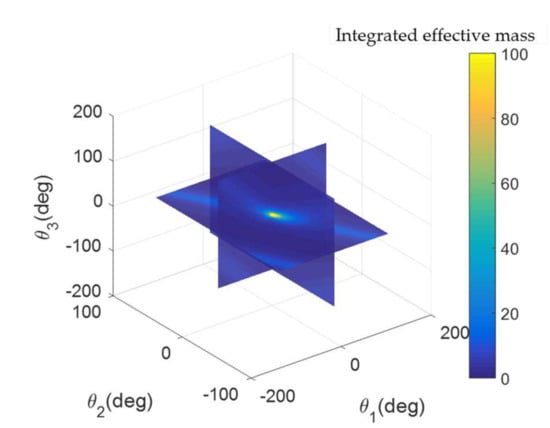
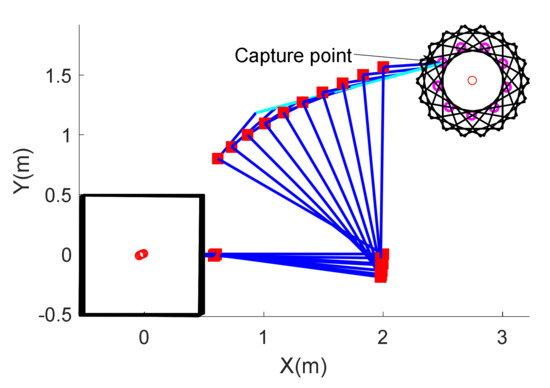
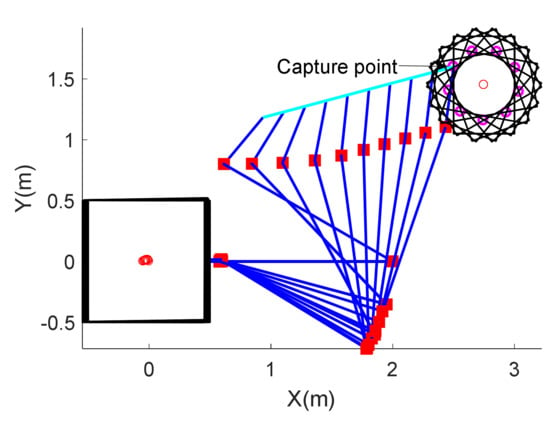
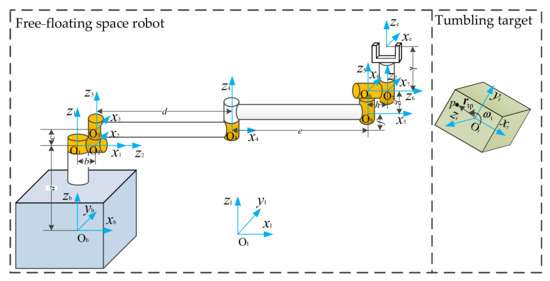
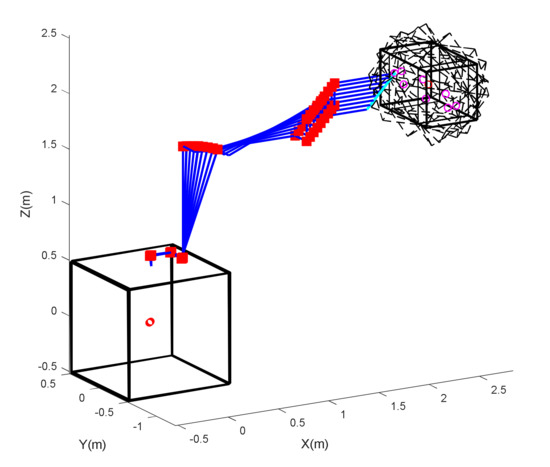
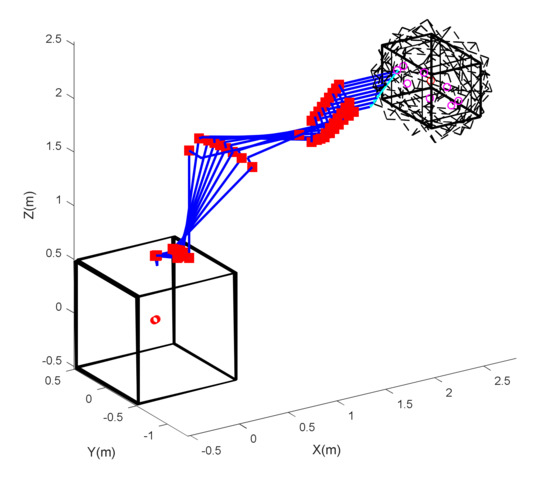
The maximum contact force is one of the most important indicators for contact problems. In this paper, the configuration optimization is conducted to reduce the maximum contact force for a free-floating space robot capturing tumbling target. First, the dynamics model of a free-floating
[...] Read more.
The maximum contact force is one of the most important indicators for contact problems. In this paper, the configuration optimization is conducted to reduce the maximum contact force for a free-floating space robot capturing tumbling target. First, the dynamics model of a free-floating space robot is given, with which the inertial properties perceived at the end-effector can be derived. Combing the inertial properties of the contact bodies, a novel concept of integrated effective mass is proposed. It tries to transform the complex contact process into the energy change of a virtual single body with integrated effective mass. On this basis, a more general continuous contact model is established, which is also suitable for non-central collisions between space robot and the tumbling target. Thereafter, the maximum contact force is derived as an important indicator for the null-space optimization method to reduce the maximum contact force. Finally, numerical simulations with a 3-degree-of-freedom free-floating space robot and a 7-degree-of-freedom free-floating space robot, as the research objects, are carried out respectively and the results show the effectiveness of the method proposed.
Full article
►▼
Show Figures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}