




Appl. Sci. 2024, 14(17), 7454; https://doi.org/10.3390/app14177454 - 23 Aug 2024
Viewed by 548
Abstract
►
Show Figures
Sugarcane plays a pivotal role in the Brazilian economy as a primary crop. This semi-perennial crop allows for multiple harvests throughout its life cycle. Given its longevity, farmers need to be mindful of avoiding gaps in sugarcane fields, as these interruptions in planting
[...] Read more.
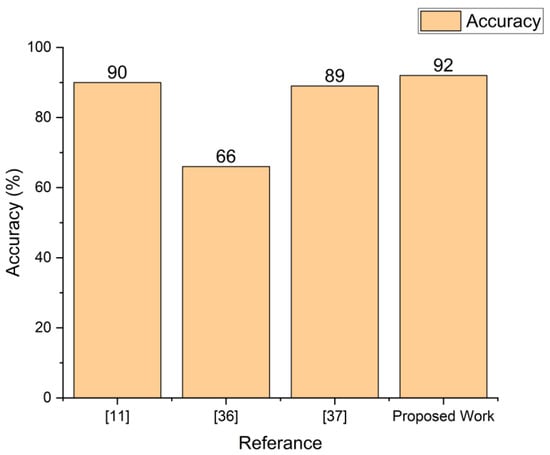
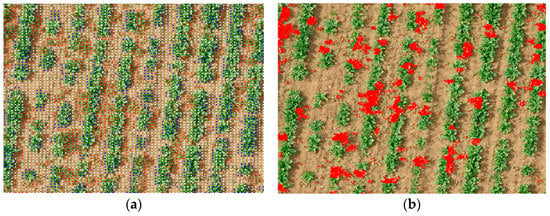
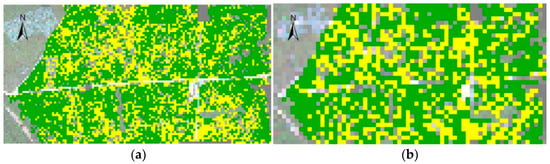
Sugarcane plays a pivotal role in the Brazilian economy as a primary crop. This semi-perennial crop allows for multiple harvests throughout its life cycle. Given its longevity, farmers need to be mindful of avoiding gaps in sugarcane fields, as these interruptions in planting lines negatively impact overall crop productivity over the years. Recognizing and mapping planting failures becomes essential for replanting operations and productivity estimation. Due to the scale of sugarcane cultivation, manual identification and mapping prove impractical. Consequently, solutions utilizing drone imagery and computer vision have been developed to cover extensive areas, showing satisfactory effectiveness in identifying gaps. However, recognizing small gaps poses significant challenges, often rendering them unidentifiable. This study addresses this issue by identifying and mapping gaps of any size while allowing users to determine the gap size. Preliminary tests using YOLOv5 and ImageJ 1.53k demonstrated a high success rate, with a 96.1% accuracy in identifying gaps of 50 cm or larger. These results are favorable, especially when compared to previously published works.
Full article

Figure 1


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}