1. Introduction
The idea of using entropy as a way to characterize surface healing during friction due to self organization was already put forward by Nosonovsky and Bhushan [
1]. In such cases, the entropy of the surface decreases with time at the expense of producing entropy somewhere else, like in the bulk of the sliding materials. Entropy quantifies the degree of (dis) order of the system. The Second Law of Thermodynamics establishes the increase of entropy in closed systems, a consequence of global deterioration. However, in systems that self-organize, entropy can decrease in the (open) subsystem of interest. Such is the case with friction, where the system of interest consists of interacting surfaces, which comprise an open system.
In this paper we consider that idea to characterize the dry friction between macroscopically smooth surfaces, as well as to describe the time-dependent smoothing process itself. Specifically, we consider the industrial process of honing [
2], either mechanical or electrochemical. In honing, a somewhat rough surface is smoothed by, for example, scrubbing it against a whetstone. Engineering parts, during manufacturing, are processed in different ways. For example, they can be milled, grinded, turned, or honed. Each process has a signature height probability distribution, most being somewhat symmetric with respect to the mean. Honing is different in that the height distribution is significantly asymmetric with respect to the mean. This is of interest to us since the Robin Hood model studied by us in the context of dry friction [
3] generates surfaces with height distribution belonging to the honing class. As expected in this process of self-organization, many power laws were found, such as in the power spectra and avalanche sizes [
4].
Here we extend that study by introducing other measures of both the steady state surface and the process of reaching that steady state. Specifically, we first study the generation of negentropy at the friction surface as the shape of the surface approaches its attractor. Second, we study the distribution of slips as function of the asperity interaction ranges between the sliding surfaces. Third, we characterize the attractor by its fractal length.
The paper is organized as follows. In
section II, we present a brief review of the Robin Hood model and its connection to honing. In
section III, we study the negentropy generation during friction. In
section IV, we show the jump distributions.
Section V shows the fractal length of the attractor.
Section VI presents conclusions.
2. The Model
We consider sites
in one dimension (
) and consider "heights"
at each site. The Robin Hood algorithm [
5] searches for the maximum height, subtracts a random amount (we chose a uniform distribution
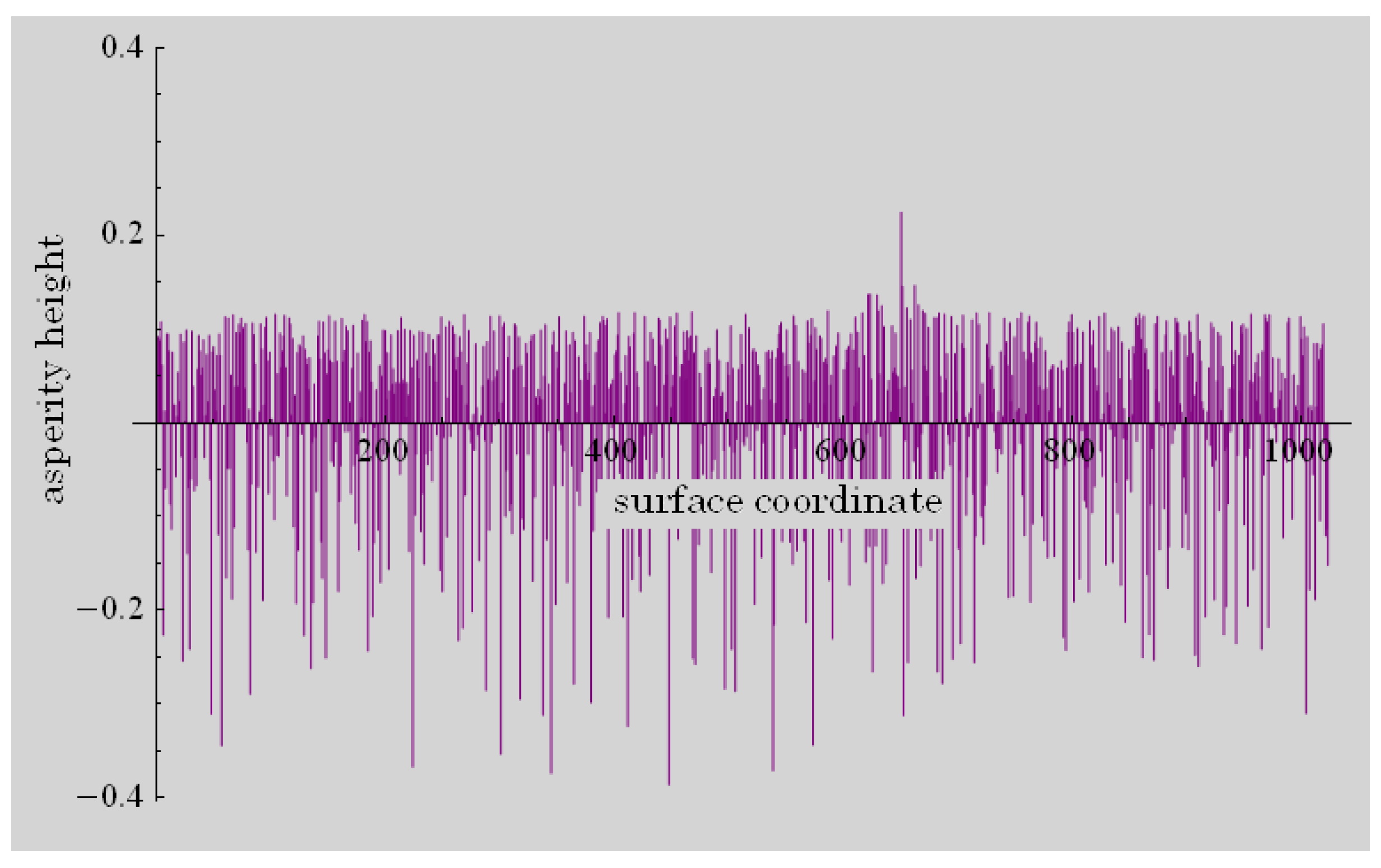
) from that location, and distributes this amount evenly between the next near neighbors. Starting from a randomly distributed collection of heights (with zero mean), the previous rules are applied sequentially for an infinite number of steps, but in practice it is enough to apply enough steps until the steady state has been reached. A typical snapshot of the steady state is shown in
figure 1. The maximum height and its "rich" neighborhood are clearly seen at around site 650 and are characteristic of the model. To be specific, the model consists of an array. Each site
i on this array at any time step
t is characterized by the height
which we assume to be the height of an atomic scale asperity at a given point of the interface between two bodies in contact. As the bodies slide against each other, the asperity with the maximal height is destroyed and some random number of atoms from this asperity is distributed among the neighboring asperities. Concretely, at each time step the site
m with maximal height
is found and the new heights are determined according to the following rule:
where
are independent random variables uniformly distributed between 0 and 1. Robin Hood determines the tallest asperity, reduces it by a random amount
, and distributes it equally among the neighbors. Assuming periodic boundary conditions so that the sites with
i=0 and
i=
L are equivalent, the total amount of matter
is conserved and we normalize it to zero.
Figure 1.
A typical Robin Hood landscape of heights. This corresponds to a small system of 1,000 sites and was done for illustration purposes.
Figure 1.
A typical Robin Hood landscape of heights. This corresponds to a small system of 1,000 sites and was done for illustration purposes.
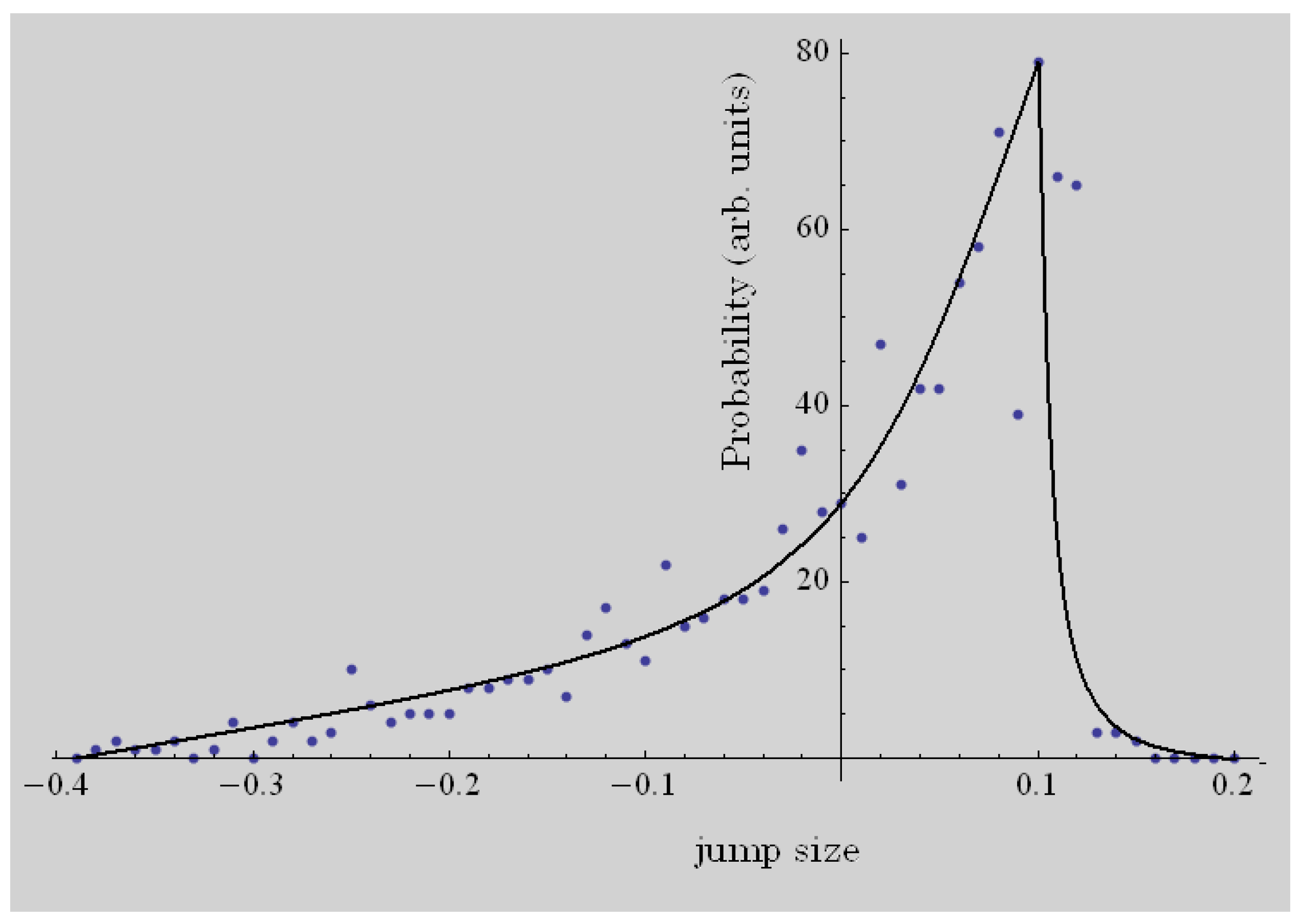
Besides this unique singularity, the heights are drastically cut off at heights above
, the critical height. This can be seen better in
figure 2, where the height distribution is shown.
Figure 2.
Height probability density. The dots are frequencies of occurrence as obtained from the data in
figure 1. The continuous line is to aid the eye.
Figure 2.
Height probability density. The dots are frequencies of occurrence as obtained from the data in
figure 1. The continuous line is to aid the eye.
Figure 2 shows explicitly what is already seen in
Figure 1, that there is a wide distribution of heights below
, while above
the distribution drops rapidly, being dominated by heights close to
. Moreover, the steady state consists of small fluctuations of the heights around
. This is completely analogous to what happens in the honing process: a somewhat rough surface is honed and reaches a steady state of the kind given by the distribution in
figure 2 [
6].
We interpret this model in the context of dry friction as follows: First, we imagine a second, perfectly flat surface above that of
figure 1, lying exactly at height
. Then, at each site
, we consider the difference
, always positive. This difference is the local separation between the asperities of the two surfaces. Whether a particular site participates in friction or not is controlled by whether or not
, where
is the range of the interaction, typically controlled by the exponential tails of the atomic electron densities. Of course, for the interpretation presented here, it is immaterial whether the two surfaces are random or just one of them is, and we choose the second option for simplicity. Subsequently, instead of unnecessarily using 2 parameters
and
, we lump them together into
, where
is a threshold height, and the asperity interaction range is controlled by whether or not
.
In what follows, except when stated otherwise, we use N = 8192 sites. In this case the typical (‘thermalization’) time scale to reach the stable state is around 108 iterations.
3. Negentropy Generation at the Surface
We use the Shannon entropy [
7] as a measure of information gain during the time series of the surface landscape as generated by Robin Hood:
where
is the probability of appearance of a height in the bin
, and
is the total number of bins. For example, for the steady-state situation, equation (1) can be evaluated with the probabilities from the data in
figure 2. To compute the probabilities
pj we proceed as follows. We take a fixed range of heights in an interval [
hT, 1] (which remains fixed throughout all the iterations) and divide this interval in
B bins. We numerically verified that for
B between 100 and 1000 there are no major differences and thus we subsequently chose
B = 100. The
pj are approximated by
/
N, the number of heights in bin
, divided by the total number of
N points.
We present the change in entropy
with respect to the initial uniformly random surface:
The minimum and maximum heights, and the widths of the bins remain fixed throughout all
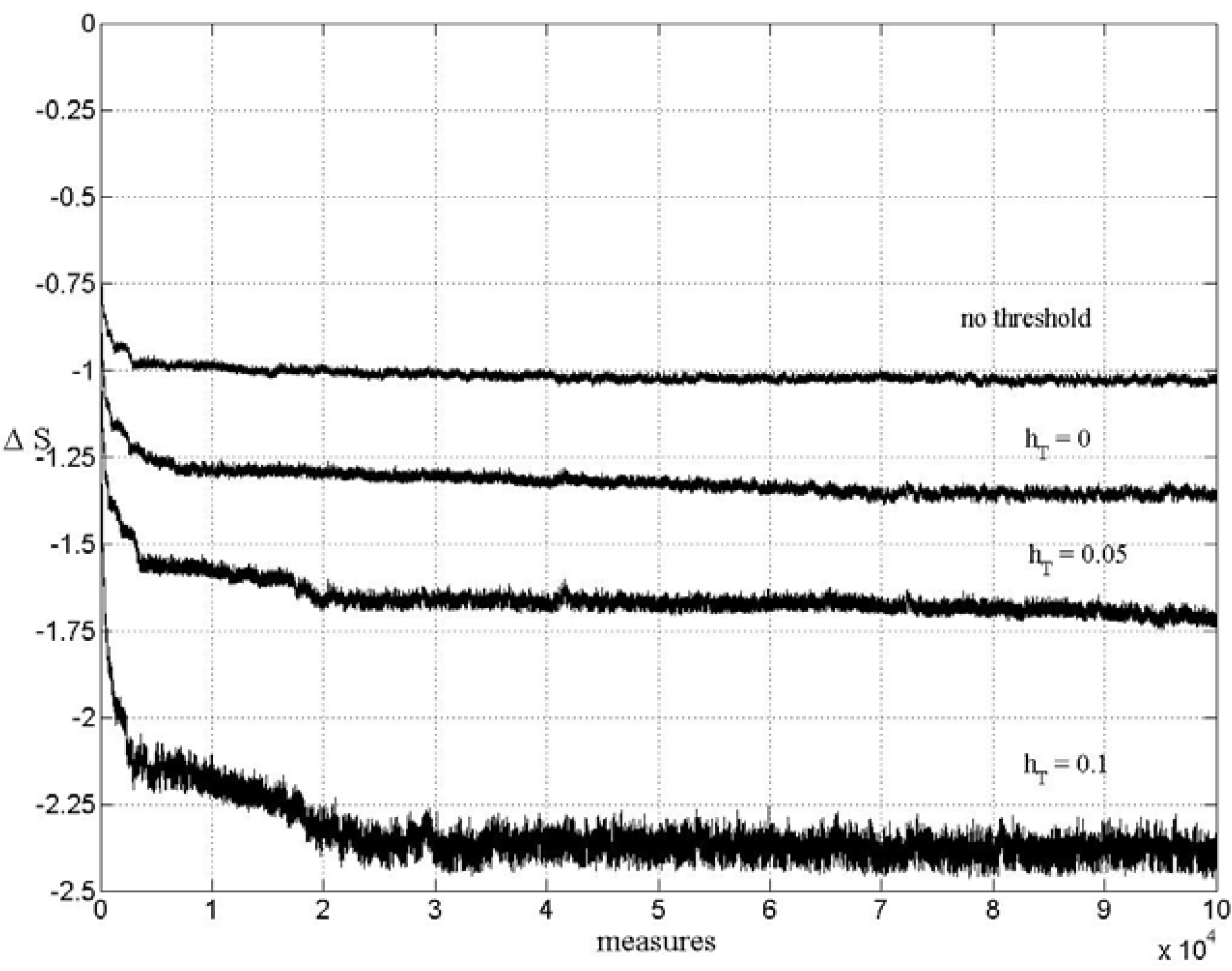
iterations. In
figure 3 we show the evolution of the entropy produced by the Robin Hood algorithm for different values of
hT. In order to evaluate the probabilities
of equation (1) a large statistics is required, thus we restrict the computation of the entropy to thresholds
hT ≤
hc since for
hT ≥
hc there are too few points. In particular, ‘no threshold’ is equivalent to
, although in practice it is enough
.
To generate
Figure 3, starting from a random configuration, the Robin Hood algorithm evolves and the system is analyzed every thousand steps. In each of those configurations, the entropy is computed from (2). A clear downward trend is seen; saturation at steady state is found after a transient of about 70 million time steps, showing the self-organization during friction produced by Robin Hood. The steady state negentropy depends on the threshold
hT,: from around
ΔS ≈ -2.37 for
hT = 0.1 to
ΔS ≈-1.35 for
hT = 0.
Figure 3.
for and different thresholds hT .
Figure 3.
for and different thresholds hT .
To recall, the entropy without threshold (i.e., the entropy of the complete profile) is computed not for hT = 0 but including negative thresholds. Therefore, the steady state negentropy decreases with threshold up to ΔS ≈ –1 for hT ≈ –0.2, while if we further decrease the threshold height below –0.2, ΔS does not change anymore.
4. Influence of Load on Slip Distribution
In this section, we model the distribution of slips of an atomic force microscope (AFM) tip [
8] as it raster-scans over the Robin Hood landscape. AFM friction experiments [
9] measure time-dependent tangential force traces for different normal loads. In our system, we tune the load through the parameter
introduced above–the mean separation between the two surfaces. As was already explained, this is equivalent to varying
. Thus, we consider the following picture: as the AFM tip is scanned over the sample surface, it will pin to a large asperity and remain there until a large enough tangential force detaches it from that site. At that point, the tip slips until it reaches another large asperity. The distance between large asperities should decrease as the load increases, meaning
decreases. Nonetheless, we ask whether there is a universal behavior regarding these slips. To answer this, we look at the distribution of slip sizes.
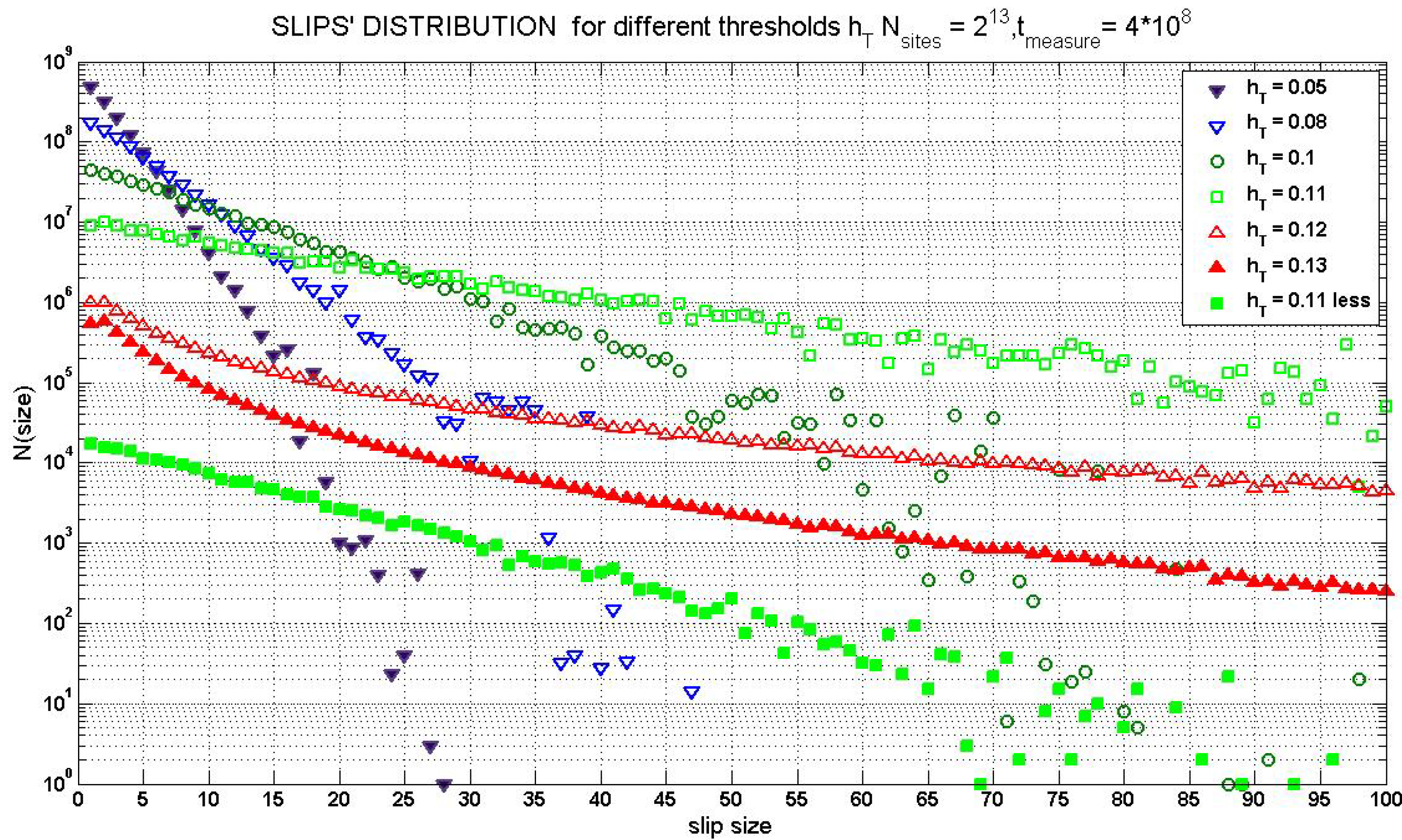
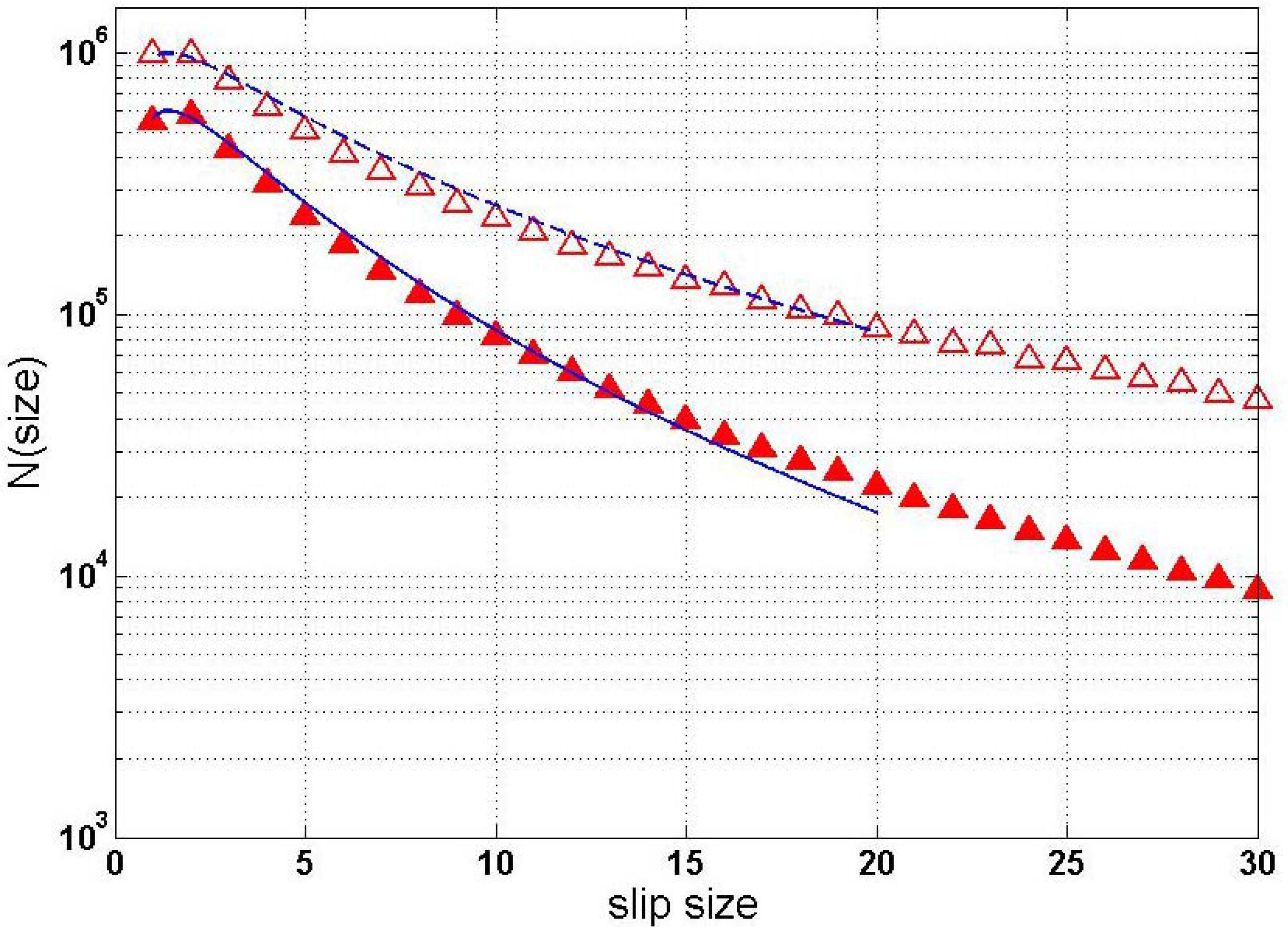
Figure 4 shows three different behaviors for the distribution of slip sizes. First, for small values of hT, for example 0.05, the histograms N(s) for the number of slips
vs. size s are Gaussians,
i.e, (in linear-log scales they are parabolas). Second, for larger sizes of the height threshold, 0.08 < h
T < hc = 0.1, the histograms for the number of slips
vs. size are exponentials
(in linear-log scales they are straight lines). Third, for h
T > hc = 0.1, the histograms for slips
vs. size are no longer exponentials for small sizes (we checked that they can be fitted with lognormal distributions; see
Figure 5).
Figure 4.
Size distribution of slips for different thresholds.
Figure 4.
Size distribution of slips for different thresholds.
The filled squares correspond to measures taken every 100.000 iterations instead of 1000 and they also show the same exponential behavior. Note that the measures are strictly not independent, since thermalization takes 1,000 times more iterations, but certainly the system is beyond the transient.
Figure 5 shows lognormal fits
for slips of small size s for 0.12 and 0.13.
Figure 5.
Blue curves are lognormal fits for data corresponding to hT = 0.12 with = 1.78 and = 1.2 (dashed line) and 0.13 with = 1.78 and = 1.0 (solid line).
Figure 5.
Blue curves are lognormal fits for data corresponding to hT = 0.12 with = 1.78 and = 1.2 (dashed line) and 0.13 with = 1.78 and = 1.0 (solid line).
5. Fractal Length of the Steady State Surface
In accordance with the computation of the entropy, we should discard all the heights below
. Hence, we replace them either by
hi =
hT,
i.e. drawing horizontal lines at height
hT, or by first-order interpolation,
i.e. by drawing lines between all points remaining (as expected, we found no appreciable differences between these two procedures). Then, using the box counting method, we compute the fractal dimension of the resulting “effective” profile. Specifically, we cover the profile with boxes of side s, and find how the number of boxes N changes with s. For a power law change, as is the case here:
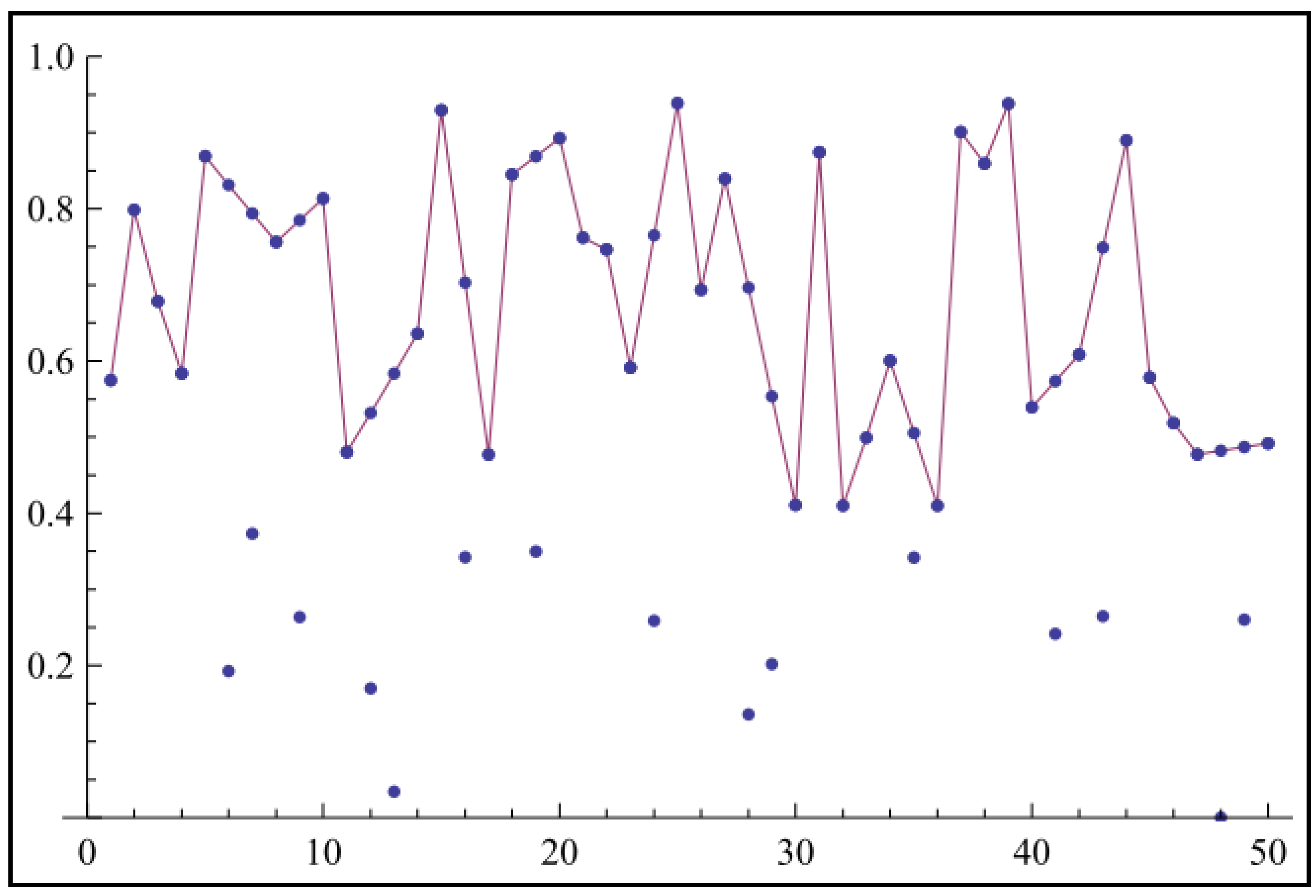
and d is the fractal dimension reported here. In
figure 6 we show this profile for the case of linear interpolation (purple line).
Figure 6.
Linear Interpolation of Surface Profile.
Figure 6.
Linear Interpolation of Surface Profile.
To test the algorithms of fractal length and area (box-counting method), we used them on a straight line of constant height 0.1234567. This line had a dimension of 0.9998 and the area under it had a dimension of 1.986.
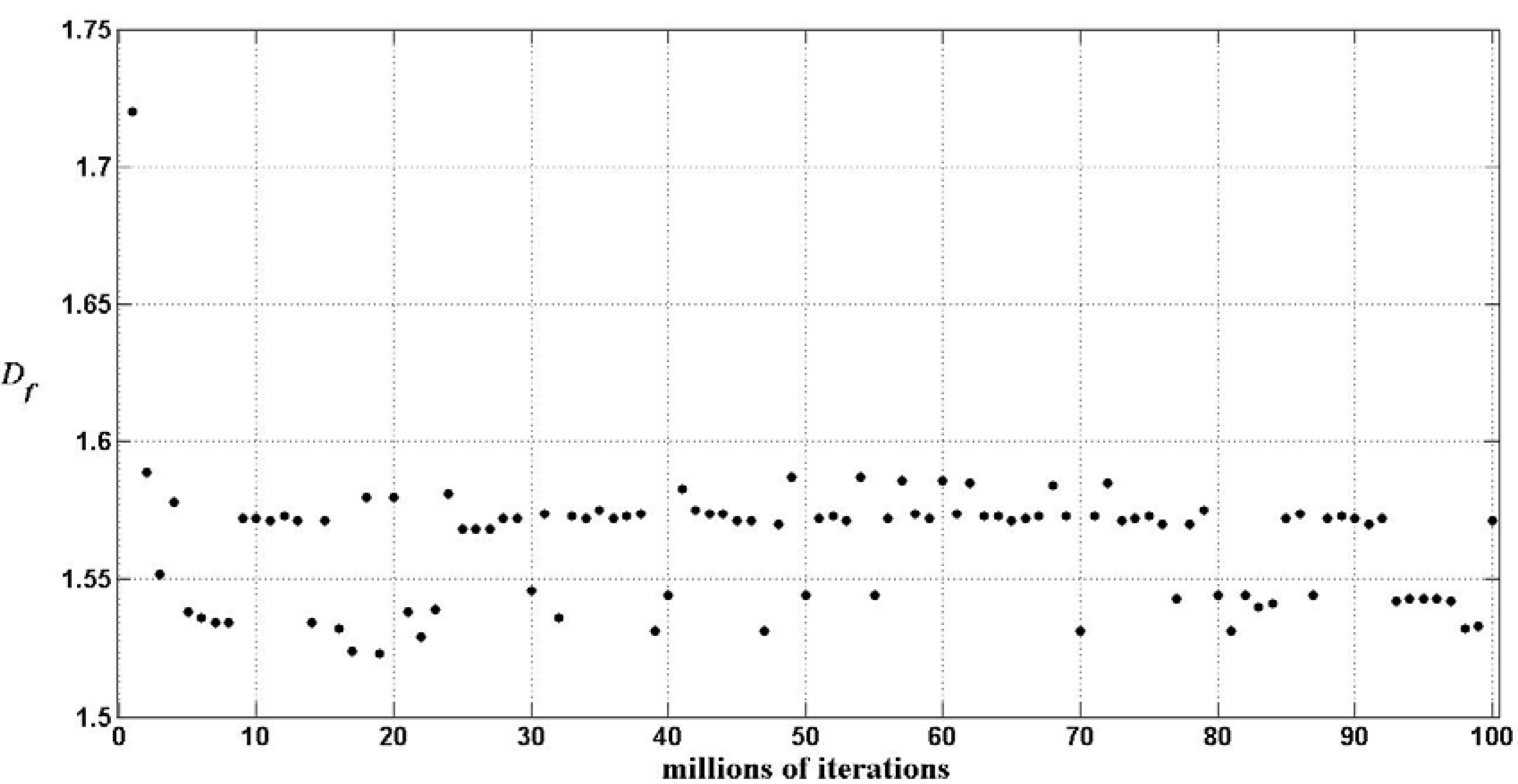
We then determined the fractal length dimension of the Robin Hood profile (threshold of 0) as a function of time for every one million iterations. That is, in
figure 7, one unit on the x-axis marks 1,000,000 Robin Hood iterations on an array of 8,192 sites.
The fractal dimension
Df rapidly decreases from its initial value around 1.7 for a completely random profile [
10,
11], and then fluctuates around an asymptotic value, which in this specific case is approximately 1.56 (with a mode of 1.57). Similar patterns were found for other threshold values greater than 0.
Figure 7.
Fractal dimension measured for = 0 vs. time
Figure 7.
Fractal dimension measured for = 0 vs. time
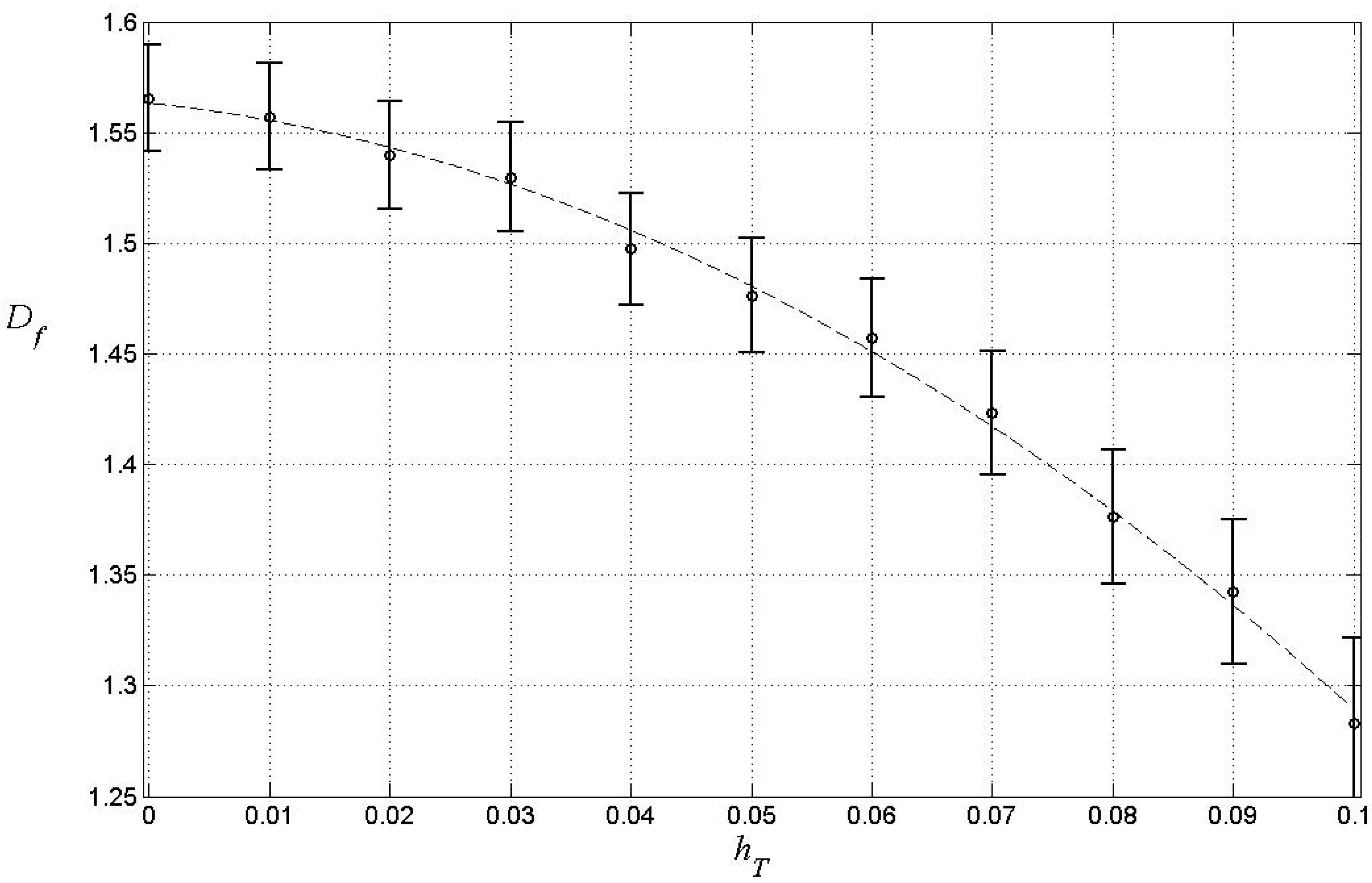
Finally, we computed the fractal length dimension of the Robin Hood profile as a function of the threshold height for the asymptotic state (reached after 10
8 iterations). We get this by averaging 100 simulations (each starting from a different random profile). As is apparent from
figure 8, the fractal dimension is a near-perfect quadratic curve, ranging from about 1.563 at a threshold of 0 to approximately 1.27 at the critical height.
Figure 8 shows the dependence of the fractal dimension on height threshold It also shows a curve fit
, with adjusted R-squared of 0.997. The error bars correspond to the standard deviation from 100 different simulations per threshold.
Figure 8.
Fractal dimension as a function of height threshold.
Figure 8.
Fractal dimension as a function of height threshold.
6. Conclusion
In this paper we studied numerically the approach to steady state in dry friction. Starting from a randomly generated surface profile corresponding to random local separations between the rubbing surfaces, we introduced dynamics based on the Robin Hood algorithm. Thus, a time-dependent surface profile is generated. That profile was further analyzed by studying its entropy content, distribution of slips, and fractal dimension. All these measures were studied both as functions of time and threshold height . The threshold height is in a one-to-one relationship to the external load; the larger the load the smaller the threshold. Thus, by studying the above mentioned measures as functions of , we intend to gain insight into their dependence on external load, a most relevant factor in dry friction. The entropy content was studied to assess the claim that friction reduces entropy. We found this to be the case in our model for all ; that is, regardless of external load, our model suggests a self-healing through friction. In addition, we found that the steady state value of the entropy decreases with , or equivalently, increases with external load. This is due to the fact that as the load increases, the two surfaces become more intimately in contact and smaller imperfections become detectable. The distribution of slips is important to understand the relevant dependence on load of the stick-slip behavior. The size of slipsobeys different distributions , depending on the threshold . For small values of , say 0.05, is Gaussian. At intermediate values, , becomes an exponential. Finally, for a lognormal distribution replaces the exponential at small . We have no explanation for these transitions. Fractal dimension was studied because it can provide insight into self organized systems, such as the one studied here. Like the entropy, Df converges to a definite value that, of course, depends on hT. We also made the connection between Robin Hood surface profiles and honing, namely that among all the surface polishing treatments, honing, like the Robin Hood profile, renders asymmetric profile height distributions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







