1. Introduction
The performance of the control system has a direct impact on the security and the economy of an industrial process. However, about 66%–80% of the control systems cannot achieve the desired performance [
1]. Therefore, control performance assessment (CPA) is an urgent problem, and the relevant surveys will have wide application prospects.
There are two research branches of CPA: the model-based CPA and the data-driven-based CPA. For the former branch: the Harris index was proposed first [
2]. It was used in the SISO system first, and then was extended to the MIMO system [
3]. Based on this index, the cascade system [
4], the non-phase system [
5], the traditional PID control system [
6] and the predictive control system [
7],
etc., can be assessed accordingly. In addition, many other indexes were proposed based on variance, such as the Relative Variance Index [
8], the General Minimum Variance [
9]. For the latter branch Desborough and Harris [
10] studied the data-based monitoring for SISO systems. McNabb and Qin [
11] developed a covariance-based MIMO control monitoring method. Yu and Qin [
12,
13] extended data-driven covariance benchmark to performance diagnosis.
Because the data-driven-based CPA does not require much process knowledge, it is easy to apply in practice. Furthermore, the information collection and management systems are general equipment in modern industrial production processes, so a vast amount of real operation data can be obtained. Applying these data to achieve CPA is both feasible and meaningful.
For the data-driven-based CPA methods, the choice of the statistic index is an essential issue. Generally, the control system performance can be represented by the tracking error. Ideally, the controller design should be performed so that the shape of the probability density function (PDF) of the tracking error is as narrow as possible. This is simply because a narrow distribution function generally indicates that the uncertainty of the related random variable is small, which also corresponds to a small entropy value [
14]. In this case, entropy, an important statistic, has natural advantages for characterizing the control stochastic performance. Unfortunately, entropy has not been used in CPA.
The purpose of this paper is to propose an information-entropy-based CPA method with its advantage of generalized random performance description, and focuses on the selection of the Minimum- Information-Entropy (MIE) benchmark and the design of minimum information entropy index. The rest parts of this paper are organized as follows:
Section 2 presents the minimum information entropy benchmark.
Section 3 introduces a normalized minimum entropy index.
Section 4 describes a procedure for performance assessment using the MIE index for both steady and transient states. Simulation comparisons are presented in
Section 5, and a CPA test for a main steam pressure control system of a 1,000MW power plant is shown in
Section 6. The conclusions are given in
Section 7.
2. Minimum-Information-Entropy Benchmark
2.2. MIE Benchmark
Suppose a linear Gaussian process with time delay
d is:
where
is the process output,
is the control variable,
and
are the coefficients, the independent and identically distributed (i.i.d.) stochastic disturbance
; obeys Gaussian distribution
N(
μ, δ2) with variance
and mean
, and its PDF is:
The MIE benchmark is deduced with the MIE optimal control in accordance with the following steps:
Step 1: Obtain the recursive control law with the MIE optimal control.
The tracking error of the control system (2) is defined as:
where
is the process output vector collecting the immediate historical values,
i.e. ,
u is the control variable vector,
e is the tracking error vector,
r is the set-point vector. Letting
and
, the PDF of the tracking error can be obtained from (4) as:
Then from (3), (4) and (5), the PDF of the tracking error becomes:
According to the information-entropy definition (1), the information entropy of the tracking error is:
Then the objective of the MIE control is to find a control law
to minimize
, or to satisfy
. According to [
14], the recursive control law is deduced as:
Step 2: Obtain the PDF of the tracking error with the recursive control law uk.
Equation (8) can be rewritten as:
where
c is a design constant that should be designed as
μ to make the mean of the tracking error equal to 0, the control output becomes:
Step 3: Obtain the MIE benchmark.
Substituting (10) into (6), we can obtain the PDF of the tracking error as:
From (7) and (11), the MIE benchmark can be deduced as:
where exp(1) is Euler's number.
Remark 1: During the delay-time, the controller with no delay-time compensation has no effect on the process output, so the system must achieve its steady state after the delay time. From (11), we can know that the steady-state tracking error obeys a Gaussian distribution. Then the steady-state MIE benchmark is .
2.3. Upper Bound of the MIE Benchmark
Remark 2: The steady-state MIE benchmark of Remark 1 is obtained without using the time delay as a priori-knowledge. If the delay time is known, a tight upper bound of the MIE can be obtained.
The process (2) can also be described as:
where
and
.
Suppose the feedback control law is:
From (13) and (14), we have:
where
(
i=1,2,…) are constant coefficients.
According to the minimum-variance theory [
2,
16], the relationship between the minimum variance
and the tracking-error variance of the stochastic disturbance
is:
Then from (12) and (16), we obtained the upper bound of the MIE:
2.4. Extension to Nonlinear Processes and Non-Gaussian Disturbance Case
Remark 3: The MIE benchmark is also valid for nonlinear processes with non-Gaussian disturbances.
Here, we explain and prove the validity in the following two steps.
Step 1: Prove the MIE of a non-linear process is the disturbance information entropy.
Generally, a nonlinear process can be described as an autoregressive-nonlinear moving average process with exogenous inputs:
where
is the time delay,
,
,
is a stochastic disturbance with variance
and probability distribution density function
,
is a causal nonlinear function.
Equation (19) can be rewritten as:
Then the tracking error of the control system becomes:
The following equation is used to solve this MIE optimization problem:
where
. Like reference [
14], the control law is given by:
where
is a constant. With (21) and (23), we have
, the probability density function of the tracking error is:
From the definition of information entropy (7), the MIE is obtained as:
The stochastic disturbance information entropy is:
and we can deduce:
Step 2: Prove the disturbance information entropy extremum is
The following work is to prove that the extremum of
is
, no matter what distribution the stochastic disturbance with variance
obeys. The variance
of the disturbance is defined as:
All the probability density functions should meet:
According to the definition of
, and using the variational method, we have:
Considering the constraints (28) and (29), the Lagrange function is defined as:
With (30) and the Euler's equation
, we can obtain:
Substituting (34) into the constraints (28) and (29), we have:
Substituting (35) into (34), the probability distribution density function is:
So, the disturbance entropy extremum is obtained as:
It is equal to the MIE of linear process with Gaussian disturbance.
3. MIE Performance Assessment Index
For the entropy-based performance assessment, the MIE index
is defined as:
where
Hact is the information entropy of the tracking error.
This MIE index is easily understandable, meaning clear and succinct. It compares the current information entropy of the tracking error with the information entropy under the MIE control. In the meaning of the MIE, the closer the index is to 1, the better the control performance is.
The
Hmin is a slack information entropy upper bound. If the delay is known as a prior-knowledge, a tight minimum information entropy upper bound
will be obtained. In this case, the MIE performance index is defined as:
Compared to the Harris index, the advantages of the new CPA index are as follows:
- (1)
If the upper bound of the MIE is , which is selected as the performance benchmark to assess the control performance, the new CPA index will have the similar computational complexity and assessment result with the Harris index.
- (2)
If the MIE is , which is selected as the performance benchmark to assess the control performance, the delay need not be obtained as a prior knowledge. So, it is easier to be used than the Harris index in this case.
- (3)
The new CPA index can be used in non-linear processes and non-Gaussian disturbances case.
3.2. Hmin Estimation
From Remark 1, the MIE of the tracking error depends on the stochastic disturbance variance when the stochastic disturbance obeys Gaussian distribution, so the disturbance estimation, especially its variance, is needed.
The estimation of the noise sequence is important for the MIE estimation. In general, the relationship between the tracking error and the stochastic disturbance is established. Then, by reversing the process, the stochastic disturbance can be viewed as the output of the filtering, whose input is the tracking error. The filtering can be chosen as a time-series modeling. If the residuals of the modeling are “white”, they can be viewed as the estimated stochastic disturbance. Depending on the data, an AR, ARMA or Kalman filter can be used to estimate the white noise [
21]. The estimation of white noise is known as “whitening”.
After the stochastic disturbance variance is estimated, the minimum variance can be obtained by (16) with the known delay. In addition, there are also some other methods to estimate the minimum variance, such as the processes and disturbances completely identification method, the filtering and correlation analysis method [
21], the recursive least squares method [
22]. With the estimation of the minimum variance, the upper bound of the MIE can be obtained by (17).
4. MIE Based CPA Procedure
4.1. CPA under Steady State
Actual performance assessment can be divided into two situations: 1) delay is unknown; 2) delay is known. The traditional CPA method cannot achieve the performance assessment in the first case. But, the MIE-based CPA can achieve the performance assessment in both cases. The MIE-based CPA method is given as follows:
When the delay is unknown, the steps of the MIE-based CPA index estimating procedure under steady state are summarized as below:
Step 1. Get the tracking error from the set-points and the process outputs.
Step 2. Calculate the tracking error PDF γ from (40), which can be canceled when using the nonparametric information entropy estimation method.
Step 3. Calculate the actual tracking error information entropy from (1) and the PDF γ.
Step 4. Estimate the stochastic disturbance by “whitening”.
Step 5. Obtain the MIE Hmin from (12).
Step6. Get the MIE index η from (38).
When delay is known, a tight MIE performance index can be obtained from (39). The steps of estimating the CPA index are different in Step 5 and Step 6. They should be changed to:
Step 5. Calculate the MIE from (17).
Step 6. Obtain the MIE index from (39).
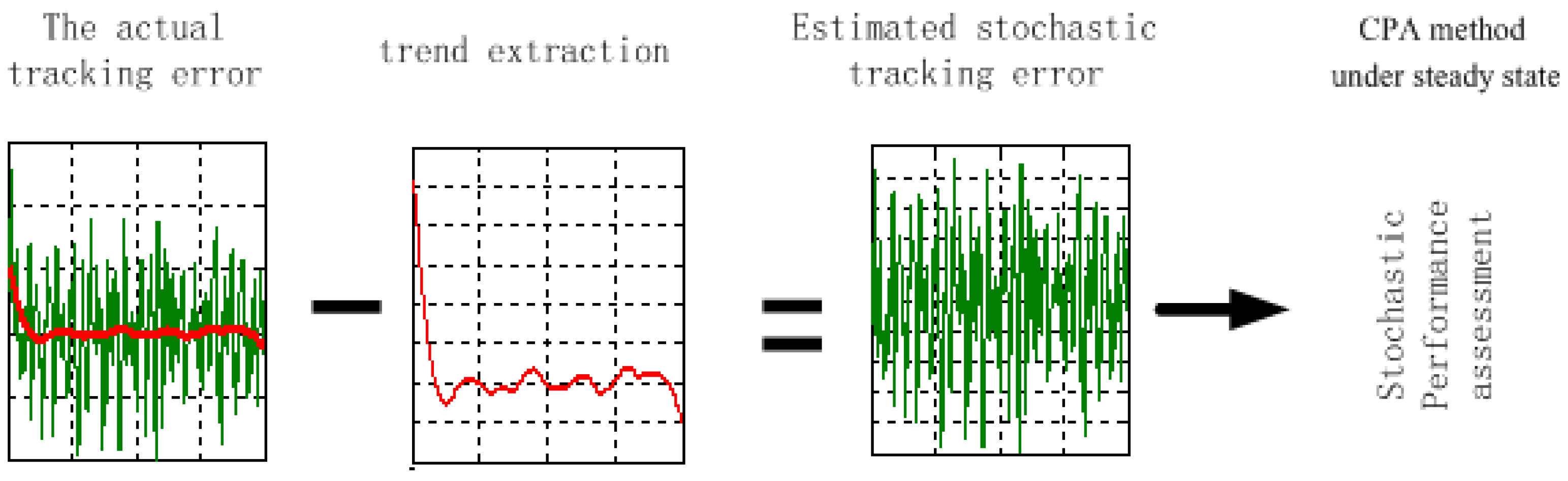
4.2. Transient CPA
In transient state, the actual tracking error contains the response of the stochastic disturbance and the response of the deterministic disturbance. The stochastic tracking error is gotten by the difference between the actual tracking error and the deterministic part of the tracking error.
The deterministic part of the tracking error is estimated by trend extraction. An efficient method of trend extraction is based on local linear fitting [
23]. Besides, many filters of trend extraction such as GLAS weighted moving average filters, Henderson weighted moving average filters are represented in [
24]. There are also many smoothers, such as the Savitzky-Golay (SG) filter [
25,
26], Hodrick-Prescott smoothers [
27], Loess smoother [
28] and smoothing B-spline [
29] to be adopted to achieve trend extraction.
The CPA procedure for transient state is shown in
Figure 1. The steps are summarized as below:
Step1: Estimate the deterministic tracking error by trend extraction.
Step2: Estimate the stochastic tracking error by the actual tracking error minus the deterministic tracking error.
Step3: Using the stochastic tracking error, the CPA under steady state method is selected to calculate the performance index.
From the above steps, the CPA under steady state is a special case of the transient CPA . For the real industrial stochastic control performance assessment, the CPA under transient state method can be utilized without indentifying the system state (steady state or transient state). In addition, there is a basic assumption that the disturbance obeys linear Gaussian distribution in the MIE based CPA. Though the disturbance in the industry environment is non-Gaussian, the method here is valid. The reason is that the performance benchmark or is still an ideal information entropy benchmark with the non-Gaussian disturbance.
Figure 1.
The procedure of the transient CPA.
Figure 1.
The procedure of the transient CPA.
6. MIE-Based CPA of an Industrial Example
In order to illustrate the above performance assessment procedure, an industrial data set from the main steam pressure control system of a 1,000MW power unit is used. This control system is an important part of the boiled-turbine system (BTS) [
32,
33]. The fuel-pressure path is considerably slower than the valve-power path (especially the power of the high-pressure turbine) and the two paths are coupled [
34]. As a result, main steam pressure fluctuation is common. The main steam pressure is an important embodiment of steam quality. So its stochastic performance assessment is important for BTS.
Figure 6.
Estimation of the stochastic disturbance.
Figure 6.
Estimation of the stochastic disturbance.
The sample data was acquired from 21:00 on March 5th to 2:00 on March 6th, 2011. Sampling interval is 3 s. There are 6,001 samples. The main steam pressure and its set-point are given in
Figure 6a. The tracking error is shown in
Figure 6b. The actual information entropy is calculated as
Hact ≈ −3.509 by a non-parameter estimator [
18]. The trend of the tracking error is obtained by Hodrick-Prescott smoother [
27]. Then, the stochastic error is estimated and shown in
Figure 6c. The tracking error is fit and adequately modeled by AR (30) model [
21]. The variance of the stochastic disturbance is 2.2756 × 10
−5 by “whitening”. The disturbance distribution is plotted in
Figure 6(d). From
Figure 6d, we can find the disturbance obeys non-Gaussian distribution, so the entropy-based transient CPA should be chosen. With (12), the MIE is −3.926. Then, the stochastic performance index is obtained as 0.6589 by (40). Because the disturbance obeys non-Gaussian distribution, strictly speaking, the variance-based CPA method can be used. But, the disturbance distribution is approximately symmetrical, the minimum-variance-based CPA result can be given for reference. Using the minimum variance benchmark (the delay is 34 sample intervals) with the estimated stochastic error, the Harris index is 0.6612. The two performance assessment results are similar, with the two methods. When the CAP uses the minimum variance index, the delay as a priori is necessary to be estimated. However, the delay is not the necessary priori-knowledge for the MIE-based CPA. This is a significant advantage. It will make the MIE index being widely applied in the actual industrial process by the engineers.
7. Conclusions
In this paper, a MIE-based CPA method is developed. The concept of information entropy is introduced to CPA. The MIE benchmark is presented by the MIE optimal control in a linear process and Gaussian disturbance. Then this benchmark is extended to nonlinear processes and non-Gaussian disturbance cases. If the delay is unknown, the MIE performance index is defined. If the time delay is known, a tight upper bound of MIE is used as a performance benchmark to assess the stochastic control performance. For engineering applications, a formal procedure is presented based on this performance index. This procedure only utilizes routine operating data no matter whether it is steady state data or transient data. The effectiveness of the CPA procedures is tested by many simulation examples. To show that this CPA method can be easily used in the real industrial system, the main steam pressure system in a 1,000MW power unit is used to achieve CPA. Of course, the extension of the MIE performance assessment to MIMO systems still has much work to do. Utilizing the concept of the information entropy, evaluating the performance of a specific controller or a control structure, such as a PID controller, the predictive controller, the cascade control structure, etc. is also a meaningful task.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



