Generalized Least Energy of Separation for Desalination and Other Chemical Separation Processes

Abstract
:1. Introduction
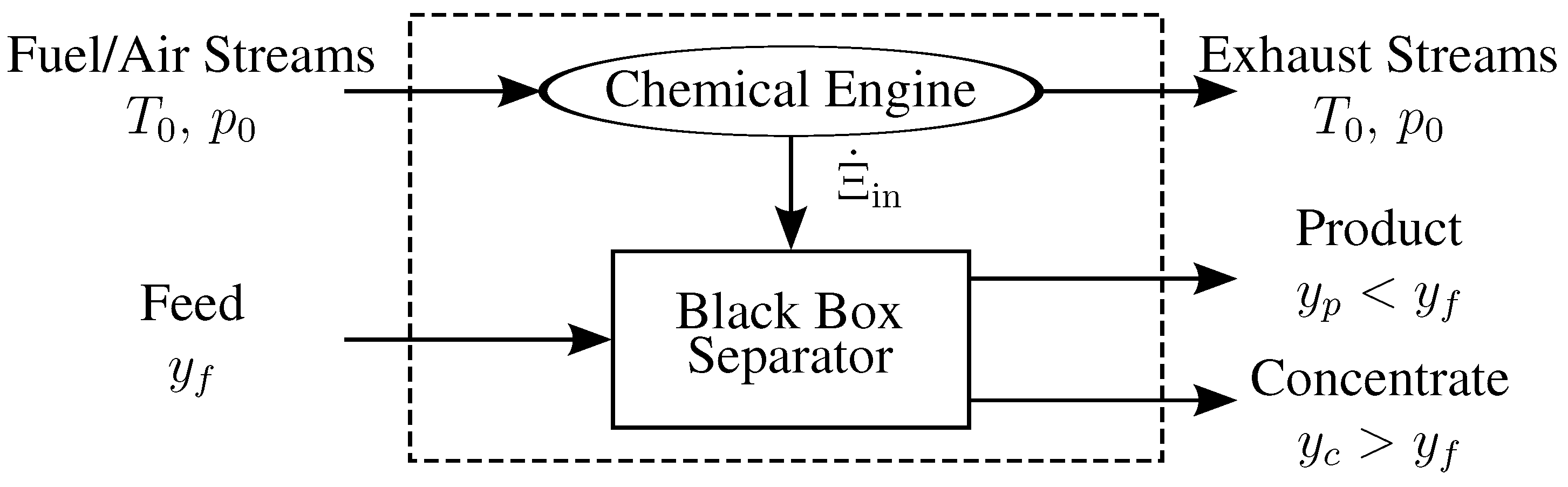
2. Generalized Least Energy of Separation for Chemical Separation Processes

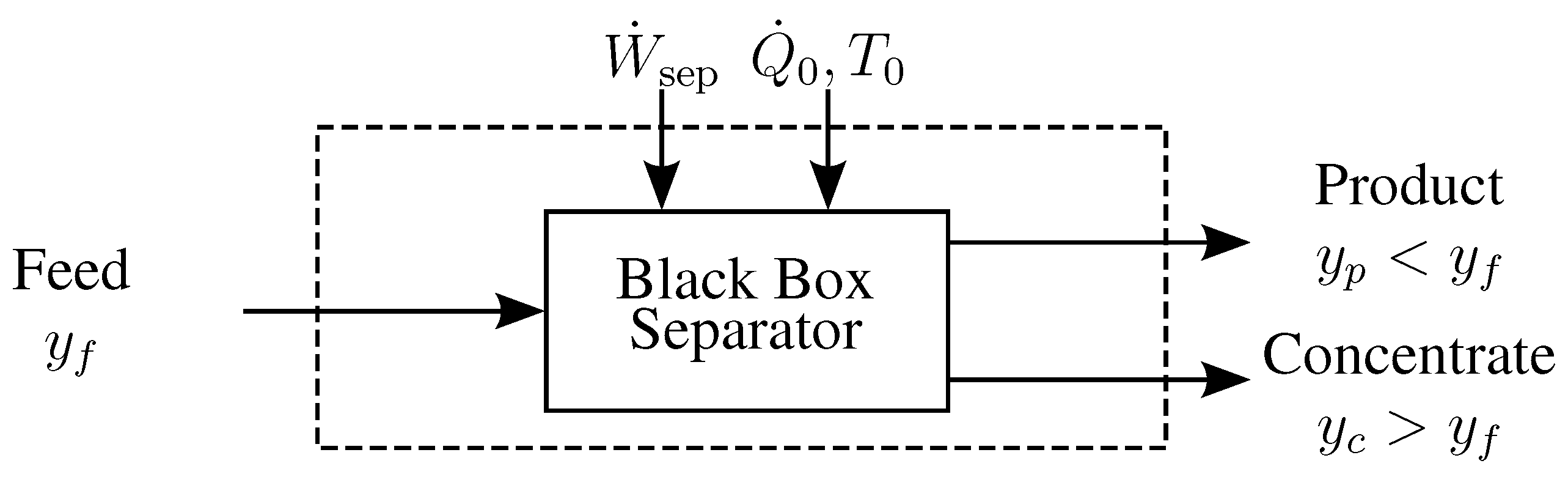
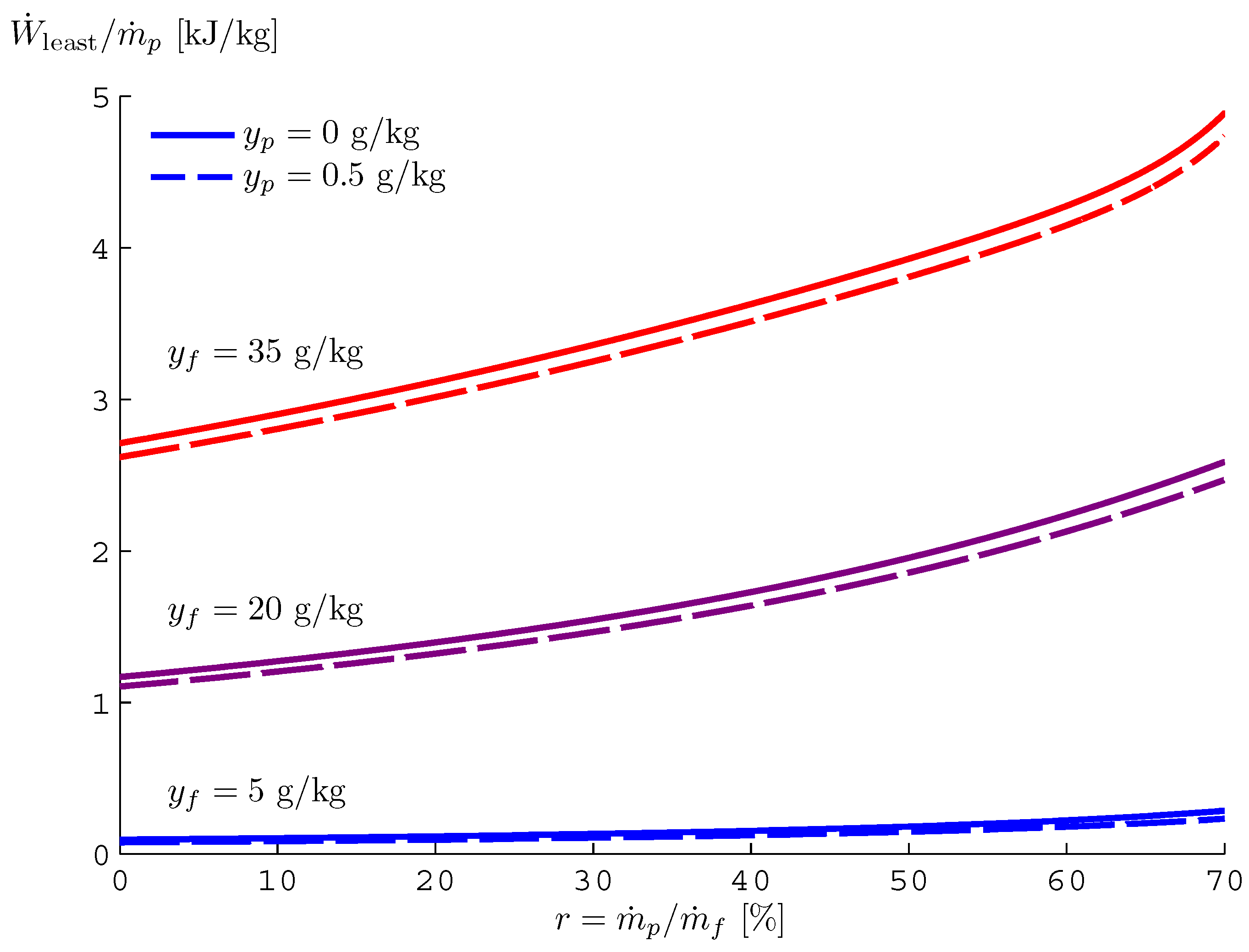
3. Least Work of Separation


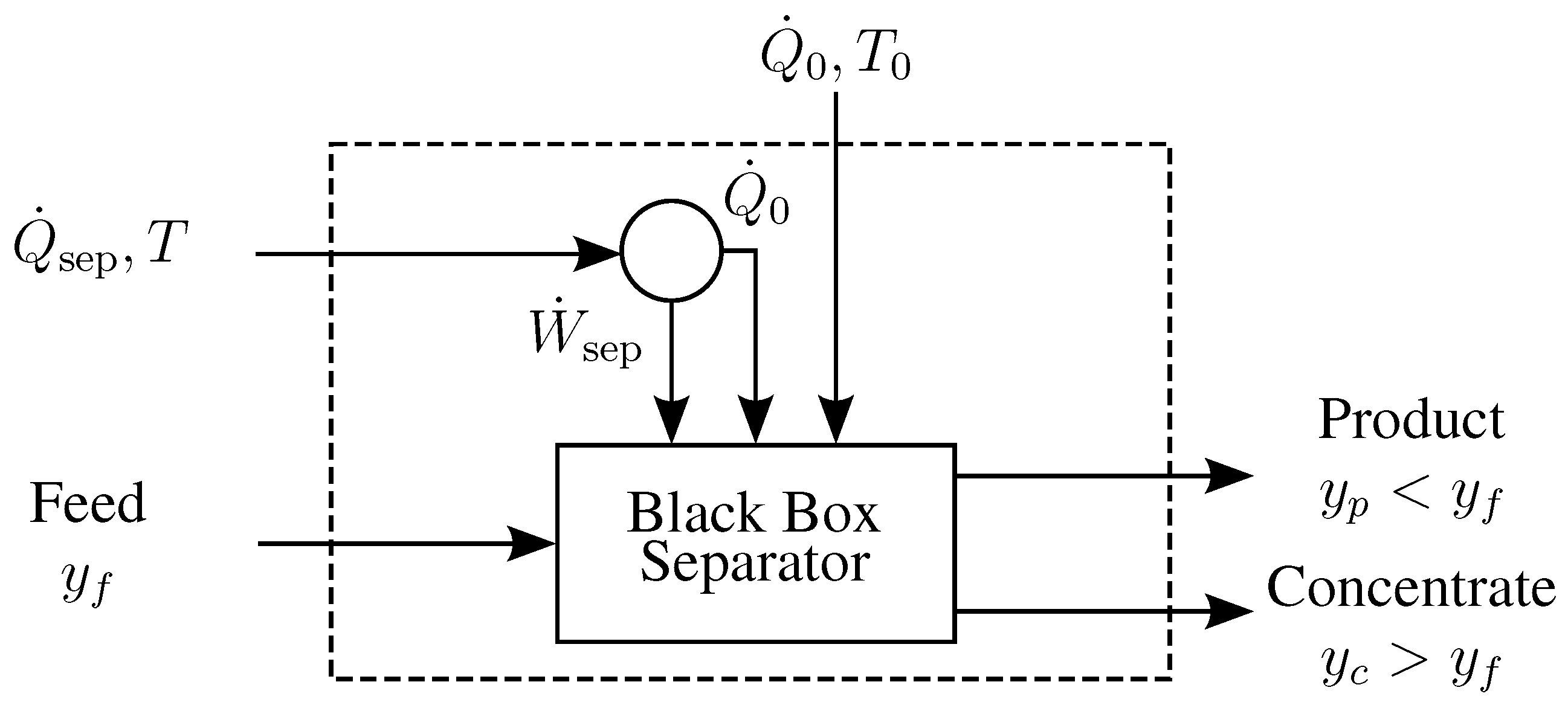
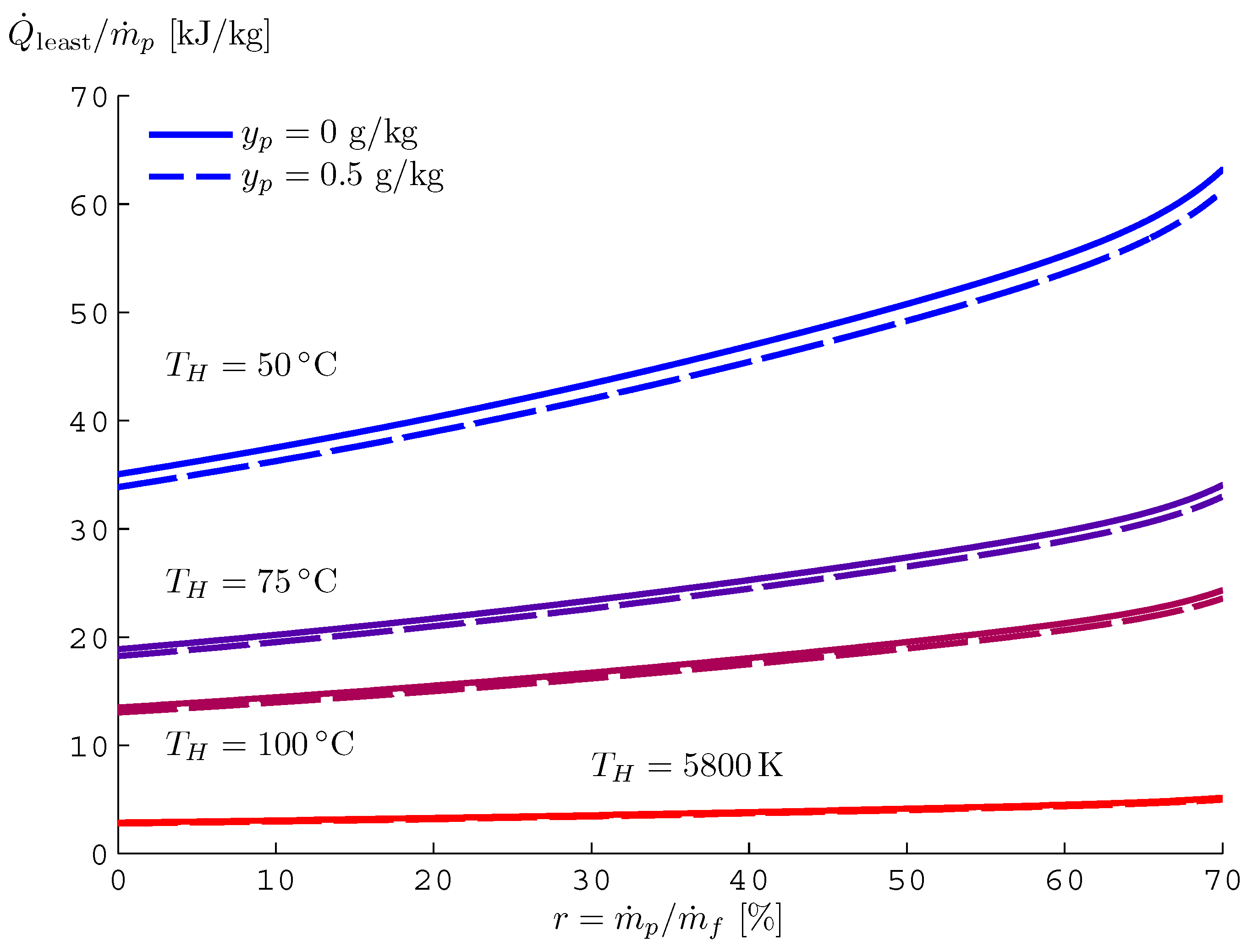
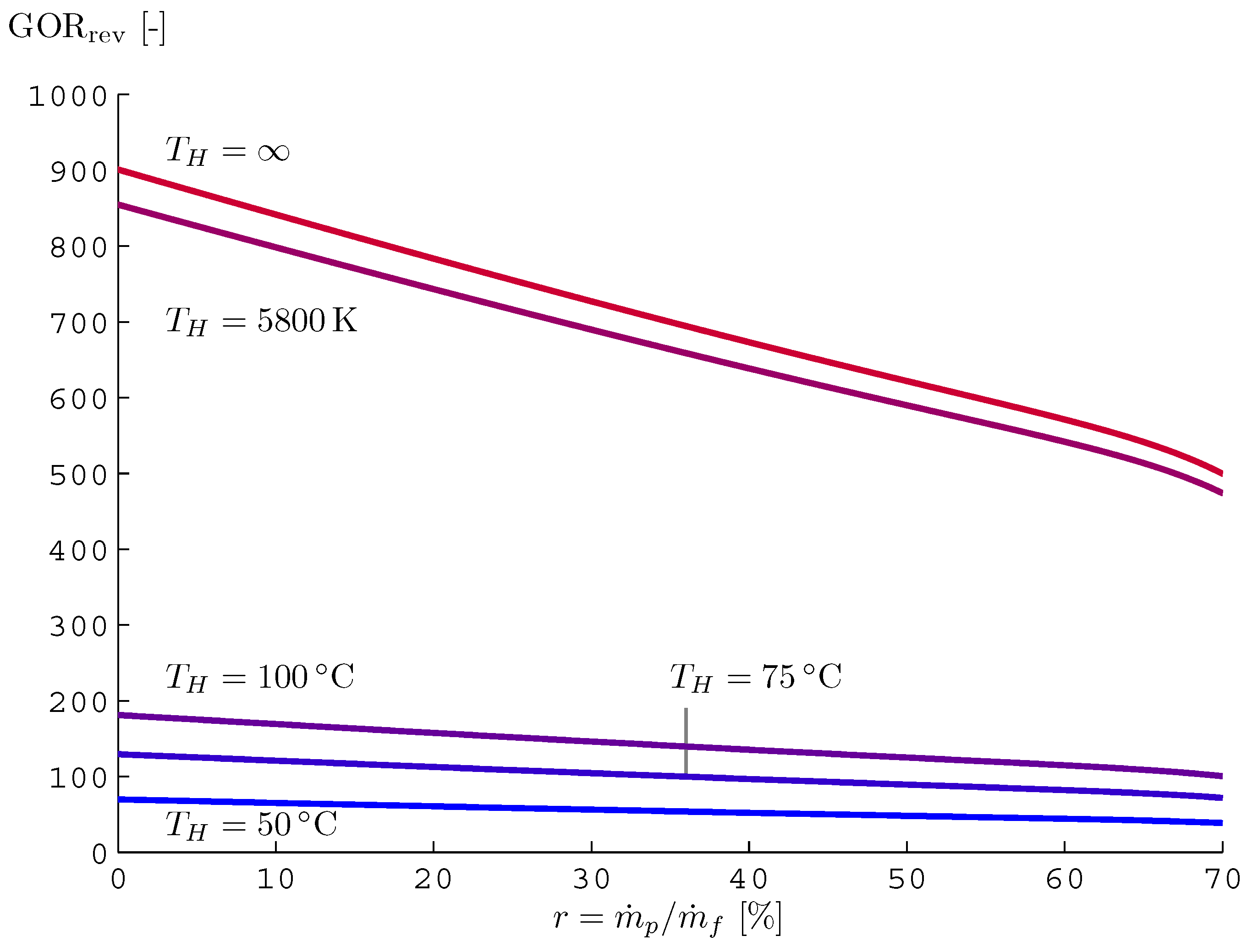
4. Least Heat of Separation



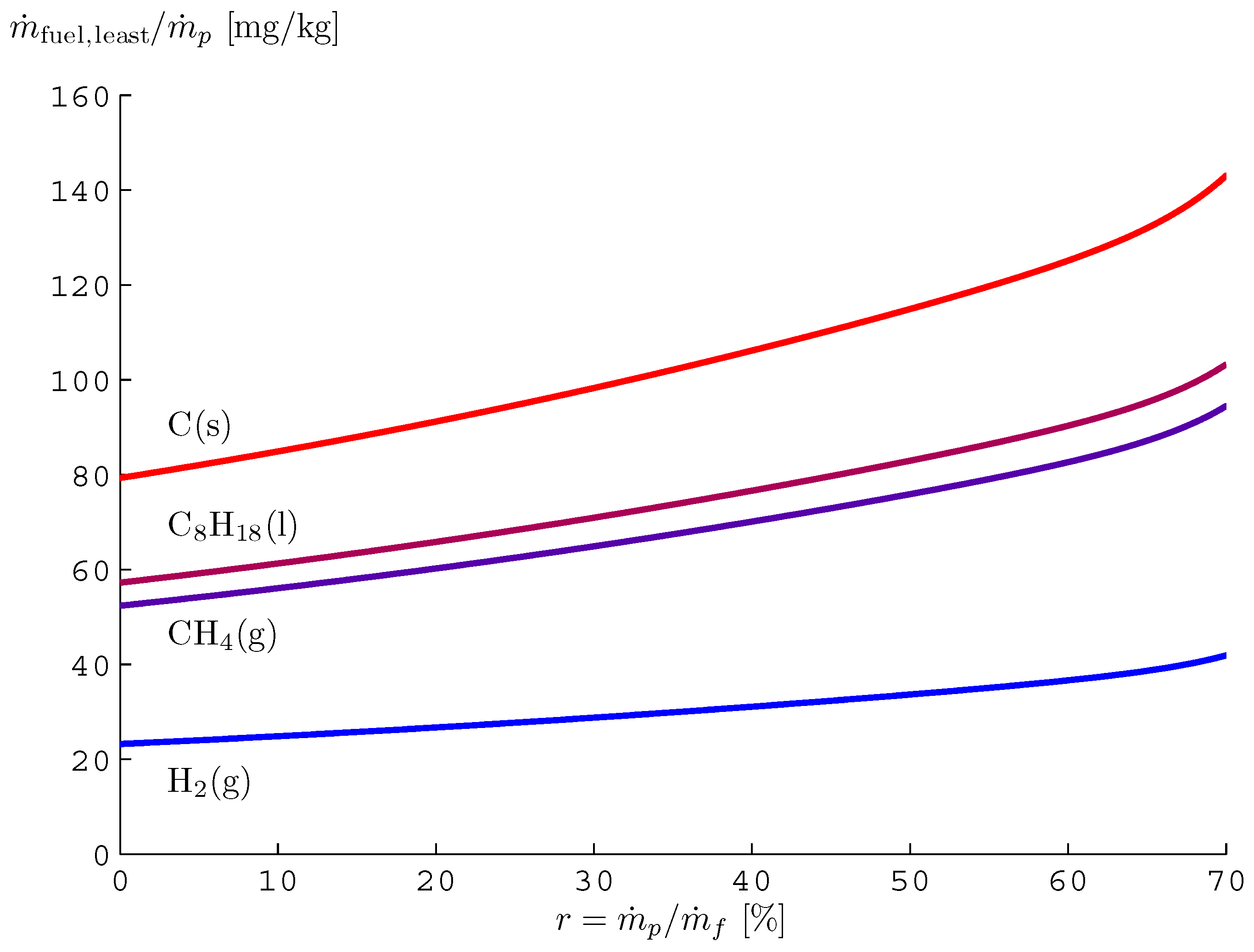
5. Least Chemical Energy (Fuel) of Separation

5.1. Combustion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuel (Phase) | [kg/mol] | [kJ/mol] | [MJ/kg] |
|---|---|---|---|
| Hydrogen (g), H2 | 0.00201588 | 235.2 | 116.6736 |
| Carbon (s), C | 0.01201070 | 410.5 | 34.1779 |
| Methane (g), CH4 | 0.01604246 | 830.2 | 51.7502 |
| Propane (g), C3H8 | 0.04409562 | 2149.0 | 48.7350 |
| Octane (l), C8H18 | 0.11422852 | 5408.7 | 47.3498 |

5.2. Chemical Disequilibrium

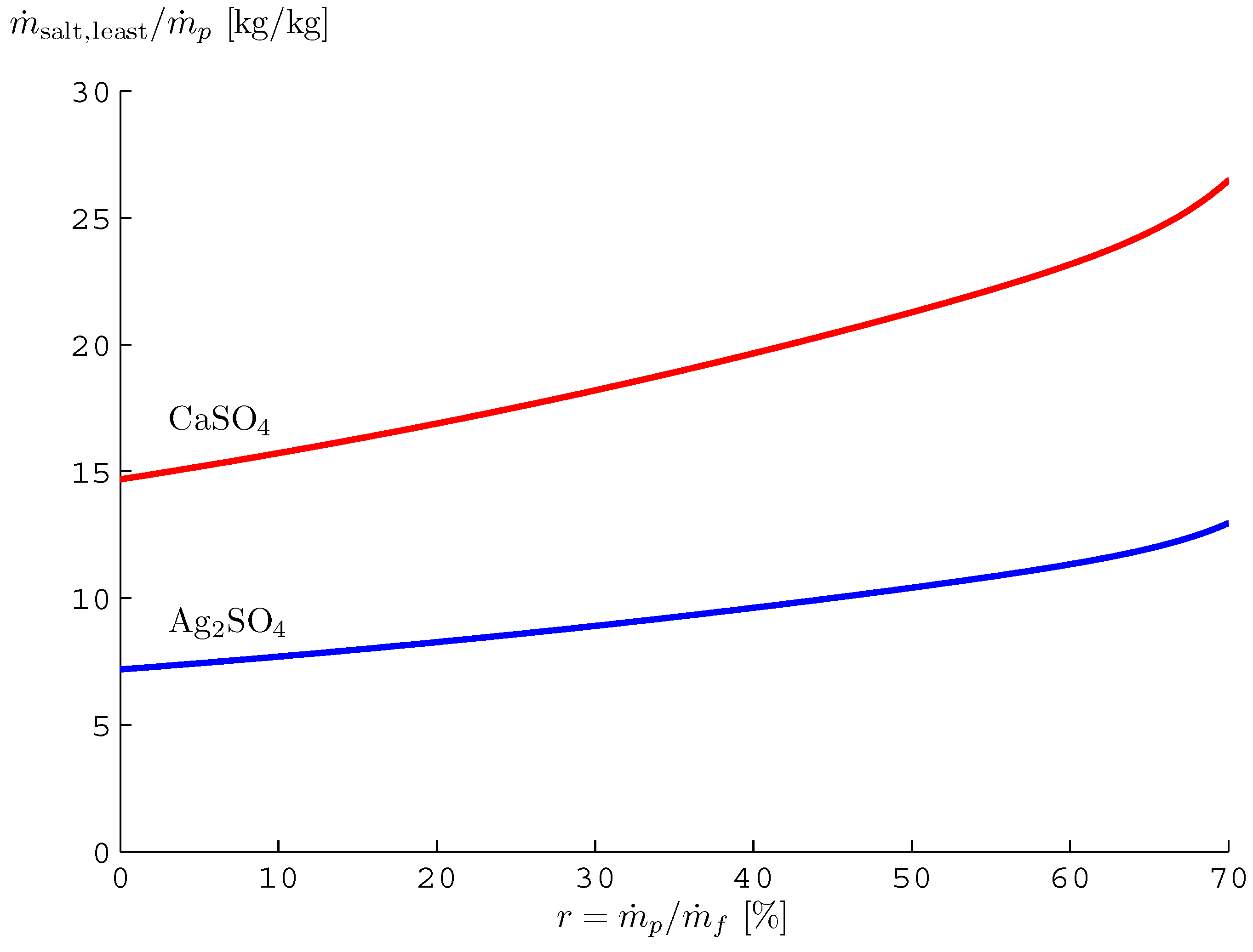
5.3. Electrochemical Reactions
5.4. Limitations
6. Least Work of Separation for a Separator with a Chemical Energy Assist Stream




7. Second Law Efficiency
7.1. Second Law Efficiency for a Chemical Separator
| System | ||||||
|---|---|---|---|---|---|---|
| [g/kg] | [kJ/kg (KWh)] | [kJ/kg] | [°C] | [kJ/kg] | [%] | |
| HDH [25] | 35* | 1.44 (0.40) | 848 (GOR = 2.6) | 90 | 153 | |
| HDH (extraction) [25] | 35* | 1.62 (0.45) | 551 (GOR = 4.0) | 90 | 100 | |
| FO [20] | 73 | 30.6 (8.50) | 990 (275 KWh) | 100 [42] | 230 | 2.5 |
7.2. Second Law Efficiency for a Desalination System Operating as Part of a Cogeneration Plant

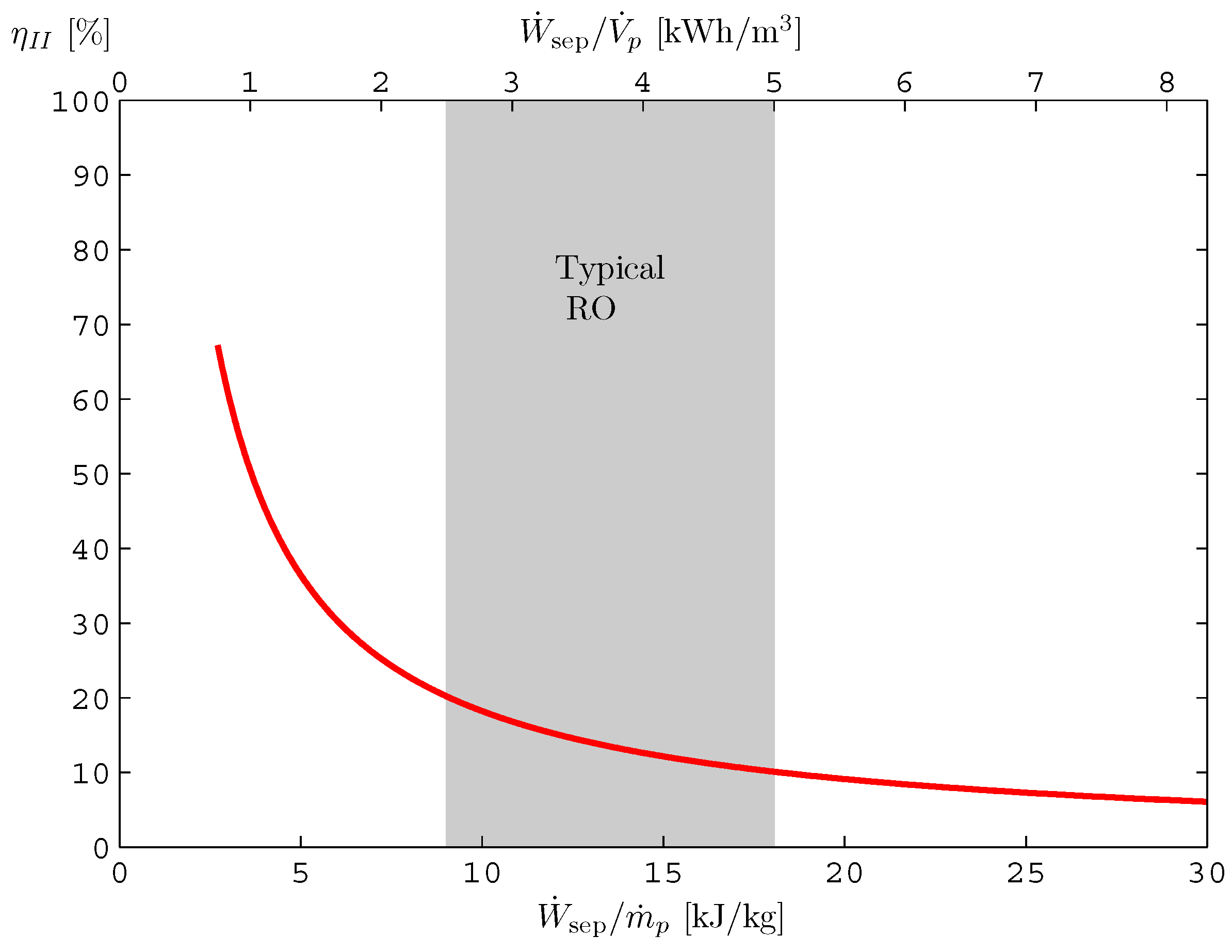
7.2.1. Desalination Powered by Work

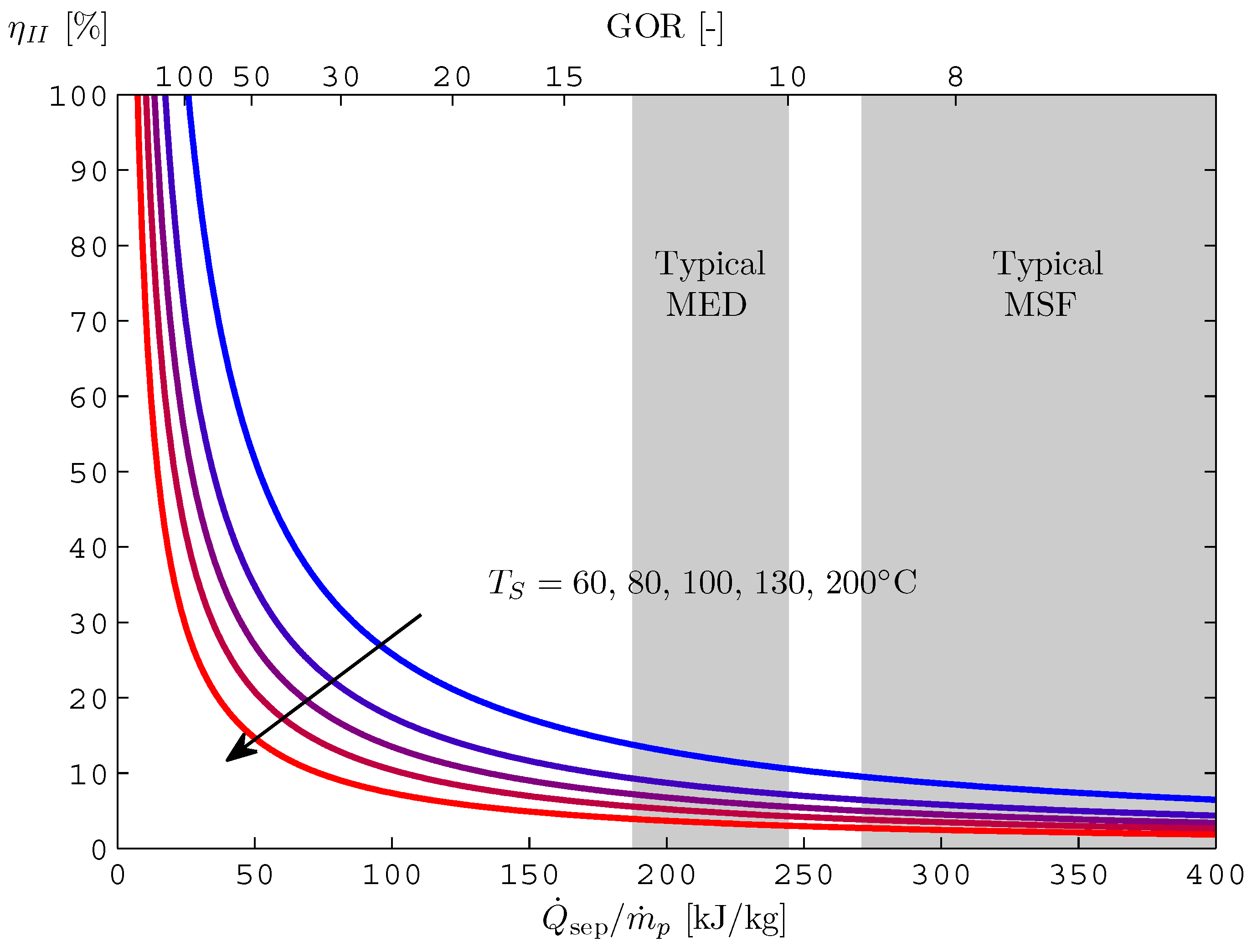
7.2.2. Desalination Powered by Heat

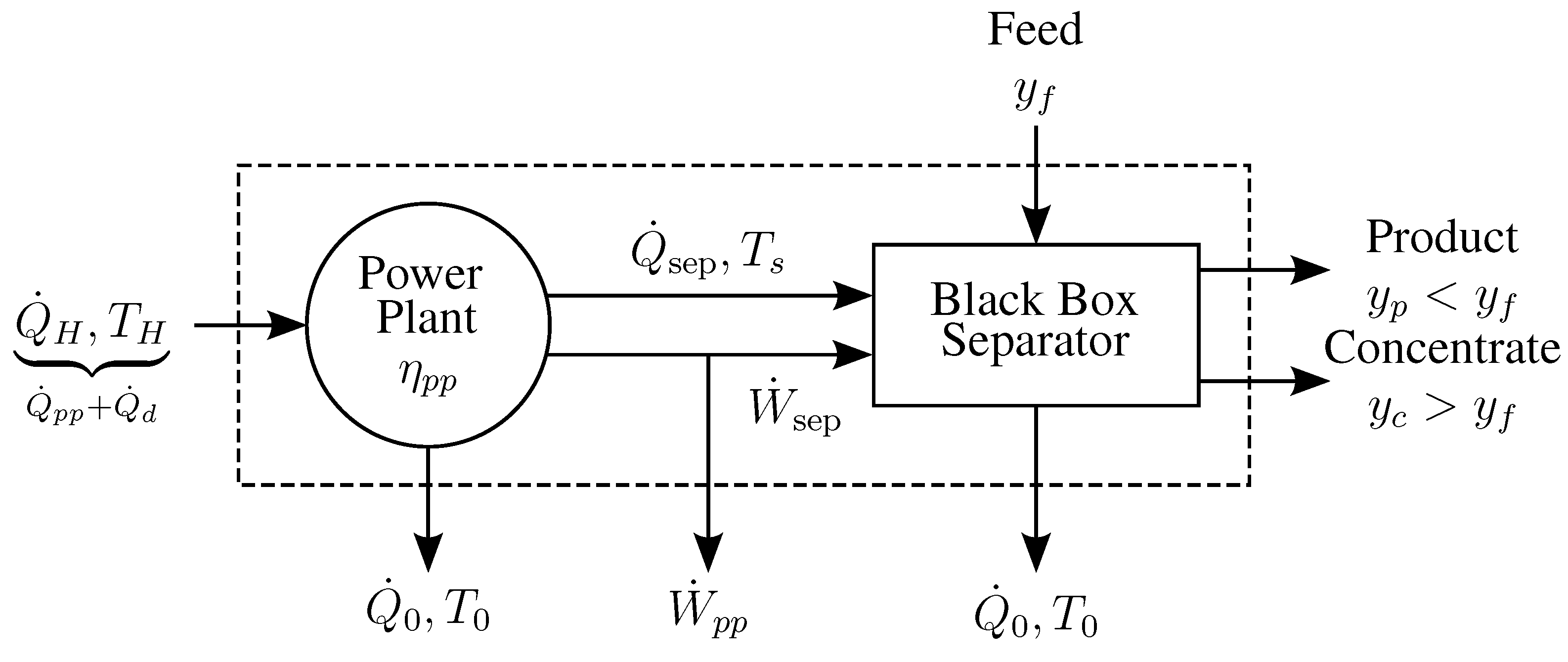
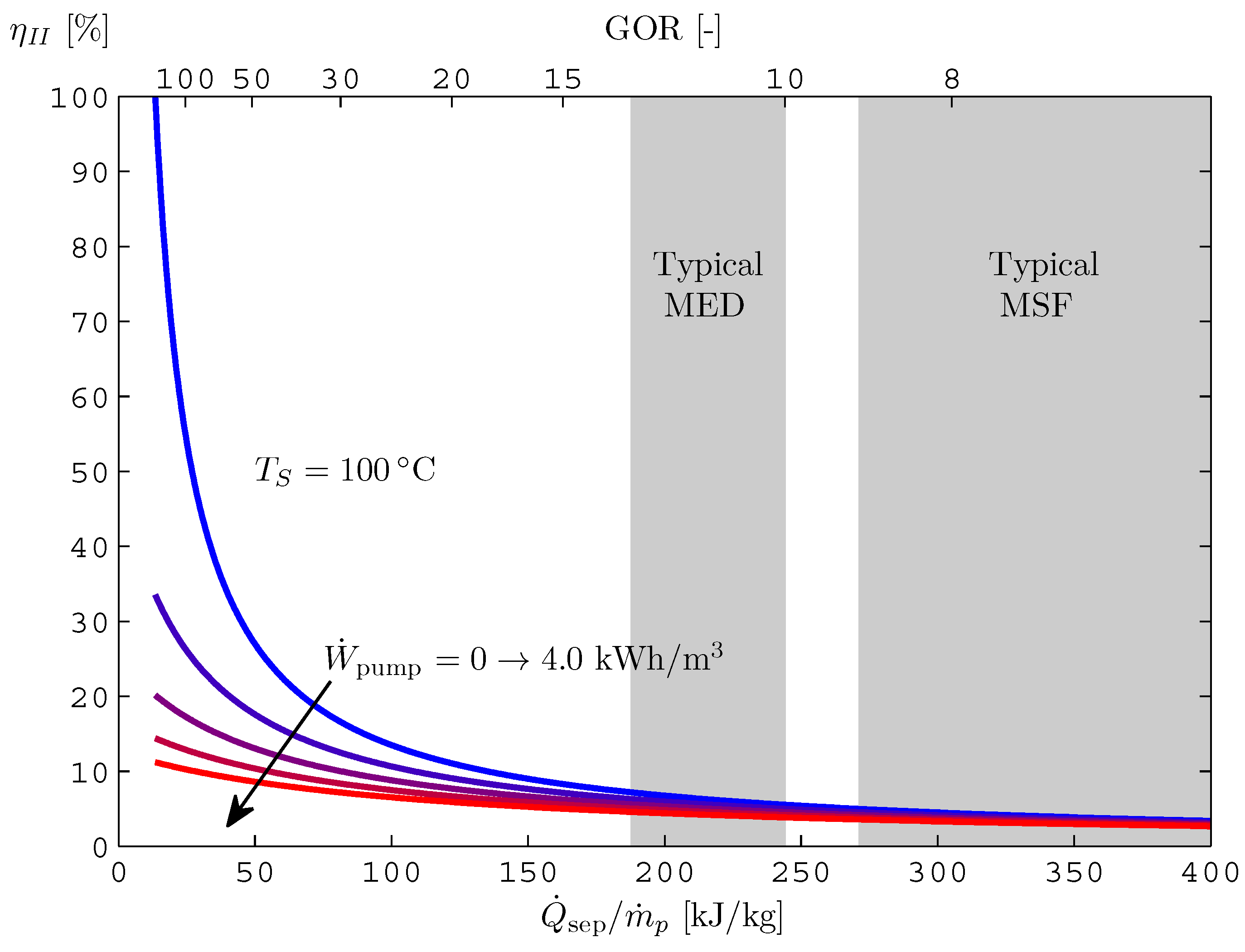
7.2.3. Desalination Powered by Co-Generated Heat and Work

8. Conclusions
- (1)
- The least exergy of separation is equal to the change in Gibbs free energy of all of the process streams involved in the separation (typically, feed, product, and concentrate). The exergy inputs can be in the form of work, heat, chemical energy (fuel), or some combination thereof.
- (2)
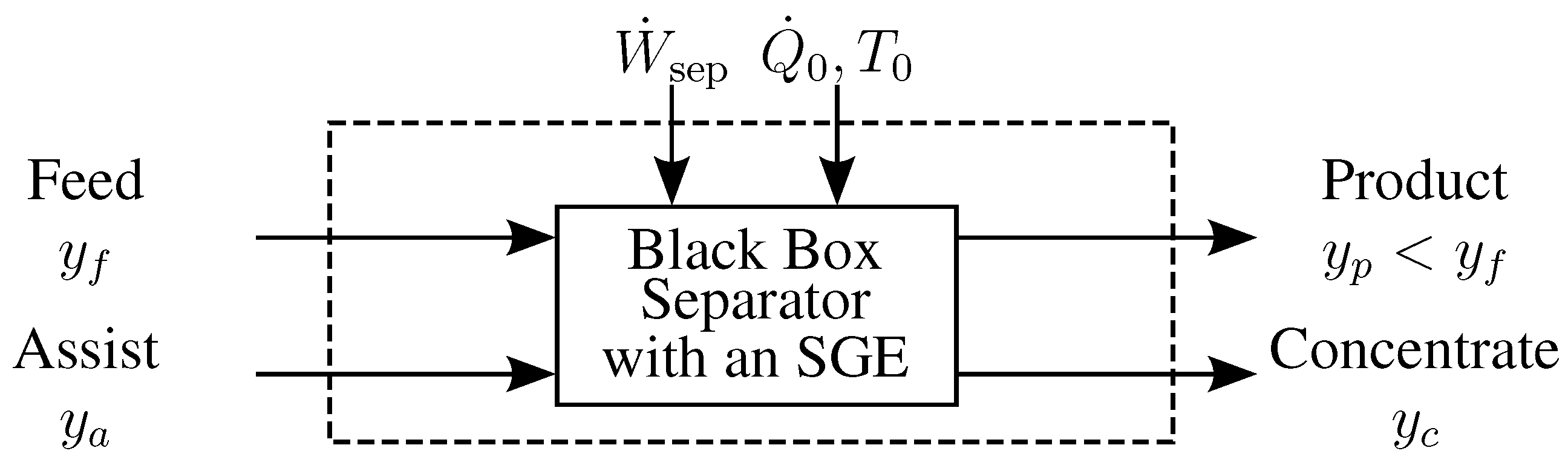
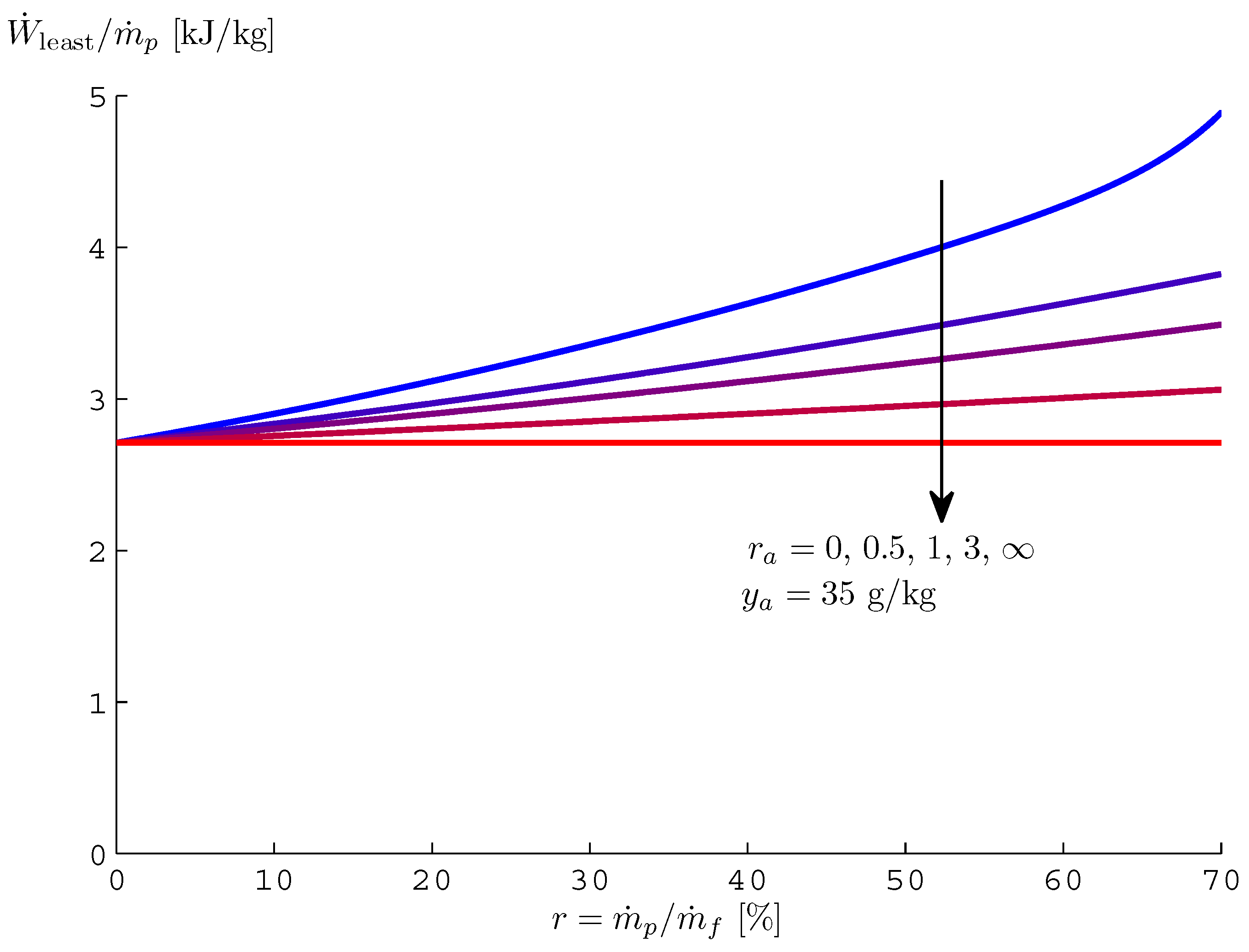
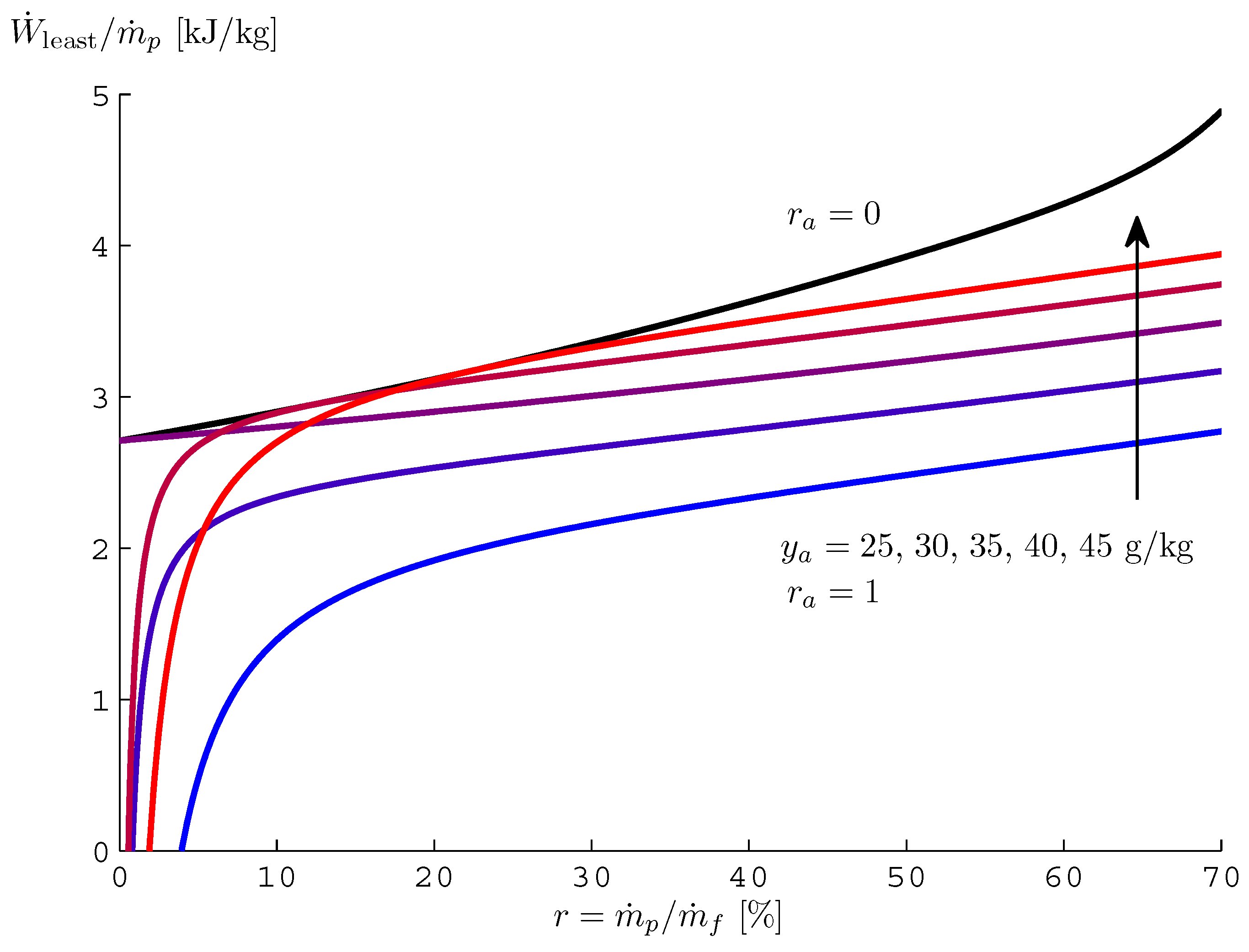
- The least exergy of separation is strictly a function of the composition of the feed and product as well as the recovery ratio and environmental temperature and pressure. If there is an assist stream, it is a function of the assist composition as well. It is not a function of the specific separation process used.
- (3)
- Least work of separation is equivalent to least exergy of separation. Least heat of separation is a strong function of the source temperature related through Carnot efficiency. Similarly, least mass of separation is inversely proportional to the chemical exergy of the fuel.
- (4)
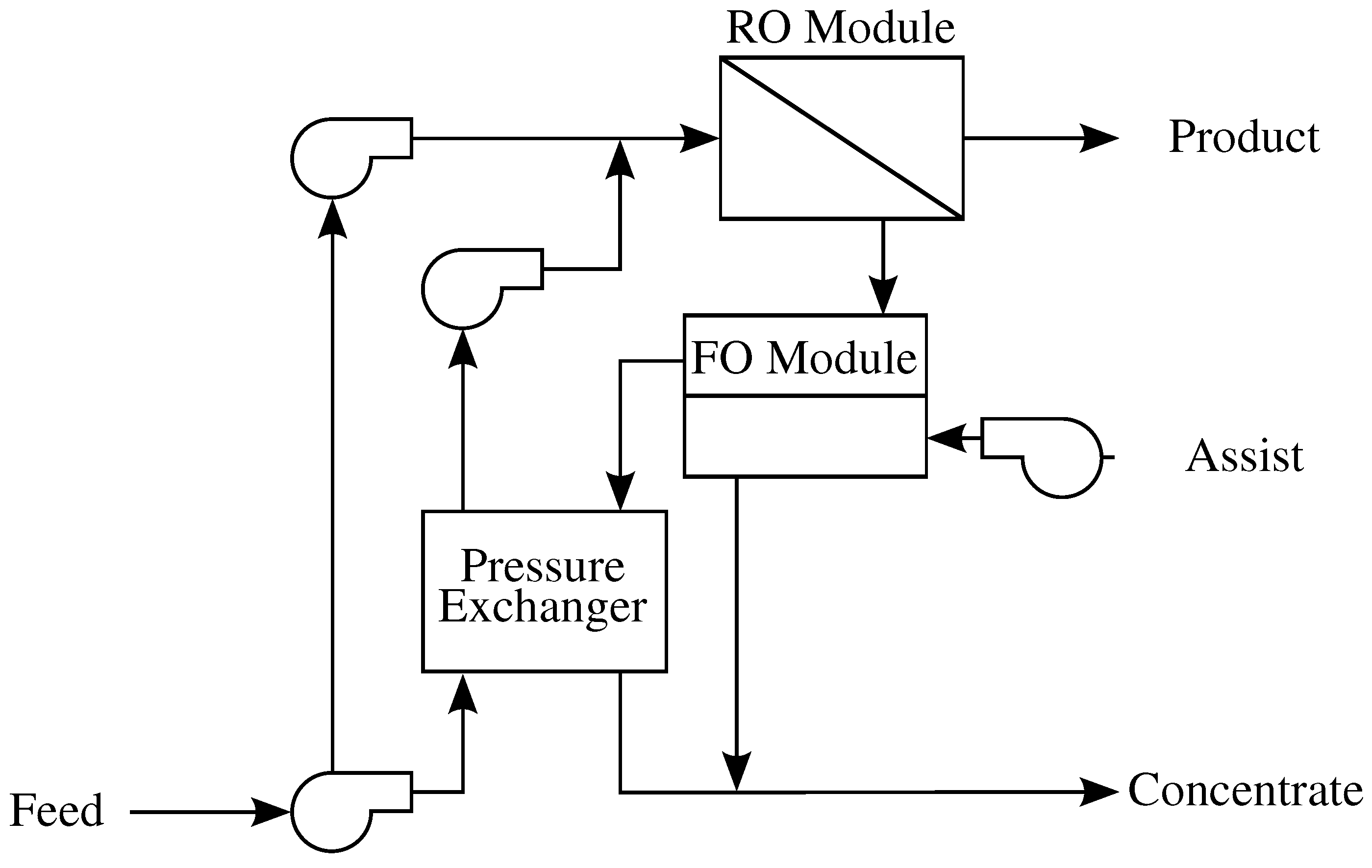
- When separation systems have material input streams in addition to the feed stream, it is possible for the least exergy to be negative. Under such conditions, the separator becomes a work producing system and the magnitude of the least exergy represents the maximum amount of work that can be produced through reversible operation. RO with an FO-based energy recovery device is one such system that relies on an additional material input stream.
- (5)
- Second Law efficiency for a chemical separation process is defined as the useful exergy of the product divided by the actual exergy input. When evaluating the Second Law efficiency, it is essential that the control volume is selected in such a way that only primary energy sources are considered and that all process streams are allowed to come to thermal and mechanical equilibrium (restricted dead state).
- (6)
- In a cogeneration scheme where the primary energy input is heat, a work-driven separation process can never achieve 100% Second Law efficiency unless the power plant is also reversible, since the work is created through an irreversible process.
- (7)
- Based on currently available technology, work-driven desalination systems are able to achieve a much higher Second Law efficiency than thermally driven systems. From a purely exergetic point of view (based on primary energy input), it is always favorable to produce work to drive an RO system rather than to use MED or MSF. Factors such as cost, feed quality, robustness to difficult conditions, and existing infrastructure may still result in thermal systems being preferred.
Acknowledgments
Nomenclature
| Roman symbols | Units | |
| a | activity | - |
| E | electromotive force | V |
| e | electron charge | C |
| F | Faraday constant | C/mol |
| g | specific Gibbs free energy | kJ/kg |
| molar Gibbs free energy | kJ/mol | |
| molar enthalpy | kJ/mol | |
| h | latent heat of vaporization | kJ/kg |
| I | current | A |
| equilibrium constant | - | |
| solubility constant | - | |
| M | molecular weight | kg/mol |
| mass flow rate | kg/s | |
| molality of species i | mol/kg | |
| mole flow rate | mol/s | |
| Avogadro’s number | 1/mol | |
| n | number of species | - |
| number of electrons | - | |
| p | pressure | kPa |
| rate of heat transfer | kW | |
| Q | reaction quotient | - |
| R | gas constant | J/mol K |
| r | recovery ratio | kg /kg |
| S | entropy | kJ/K |
| rate of entropy generation | kW/K | |
| molar entropy | kJ/mol K | |
| T | temperature | K |
| t | time | s |
| U | internal energy | kJ |
| V | volume | m |
| rate of work | kW | |
| mole fraction | - | |
| y | salinity | kg /kg |
| Greek | Units | |
| Second Law/exergetic efficiency | - | |
| Second Law efficiency of power plant | - | |
| molal activity coefficient of species i | - | |
| chemical potential | kJ/mol | |
| Ξ | exergy | kJ |
| rate of exergy | kW | |
| ξ | specific exergy | kJ/kg |
| molar exergy | kJ/mol | |
| ζ | reaction coordinate | - |
| ν | stoichiometric coefficient | - |
| Subscripts | ||
| 0 | dead state | |
| a | assist | |
| c | concentrate | |
| H | high temperature | |
| d | desalination plant | |
| f | feed | |
| in | input | |
| least | reversible process in which all process streams cross the system boundary at the RDS | |
| power plant | ||
| p | product | |
| r | reaction | |
| reversible | ||
| amount required for separation process | ||
| s | steam temperature | |
| + | cation | |
| − | anion | |
| Superscripts | ||
| min | minimum value at infinitesimal recovery | |
| ∘ | reference state | |
| Acronyms | Units | |
| ED | electrodialysis | |
| ERD | energy recovery device | |
| GOR | gained output ratio | - |
| HDH | humidification-dehumidification | |
| LHS | left hand side | |
| MD | membrane distillation | |
| MED | multiple effect distillation | |
| MSF | multistage flash | |
| MVC | mechanical vapor compression | |
| PRO | pressure retarded osmosis | |
| RDS | restricted dead state | |
| RED | reverse electrodialysis | |
| RHS | right hand side | |
| RO | reverse osmosis | |
| SGE | salinity gradient engine | |
| TDS | total dead state | |
References
- Oki, T.; Kanae, S. Global hydrological cycles and world water resources. Science 2006, 313, 1068–1072. [Google Scholar] [CrossRef]
- Smakhtin, V.; Revenga, C.; Döll, P. Taking into account environmental water requirements in global-scale water resources assessments. In Comprehensive Assessment Research Report 2; Comprehensive Assessment Secretariat, International Water Management Institute: Colombo, Sri Lanka, 2004. [Google Scholar]
- Shannon, M.A.; Bohn, P.W.; Elimelech, M.; Georgiadis, J.G.; Marinas, B.J.; Mayes, A.M. Science and technology for water purification in the coming decades. Nature 2008, 452, 301–310. [Google Scholar] [CrossRef]
- Semiat, R. Energy issues in desalination processes. Environ. Sci. Technol. 2008, 42, 8193–8201. [Google Scholar] [CrossRef] [PubMed]
- El-Sayed, Y.M.; Silver, R.S. Principles of Desalination; Academic Press: New York, NY, USA, 1980; Volume A, chapter 2: Fundamentals of Distillation; pp. 55–109. [Google Scholar]
- Spiegler, K.S.; El-Sayed, Y.M. The energetics of desalination processes. Desalination 2001, 134, 109–128. [Google Scholar] [CrossRef]
- Mistry, K.H.; Lienhard V, J.H.; Zubair, S.M. Effect of entropy generation on the performance of humidification-dehumidification desalination cycles. Int. J. Thermal Sci. 2010, 49, 1837–1847. [Google Scholar] [CrossRef]
- Alasfour, F.; Darwish, M.; Amer, A.B. Thermal analysis of ME-TVC+MEE desalination systems. Desalination 2005, 174, 39–61. [Google Scholar] [CrossRef]
- Kahraman, N.; Çengel, Y.A. Exergy analysis of a MSF distillation plant. Energy Convers. Manag. 2005, 46, 2625–2636. [Google Scholar] [CrossRef]
- Veza, J.M. Mechanical vapour compression desalination plants—A case study. Desalination 1995, 101, 1–10. [Google Scholar] [CrossRef]
- Cerci, Y. Exergy analysis of a reverse osmosis desalination plant in California. Desalination 2002, 142, 257–266. [Google Scholar] [CrossRef]
- Sharqawy, M.H.; Zubair, S.M.; Lienhard V, J.H. Second law analysis of reverse osmosis desalination plants: An alternative design using pressure retarded osmosis. Energy 2011, 36, 6617–6626. [Google Scholar] [CrossRef]
- Mistry, K.H.; McGovern, R.K.; Thiel, G.P.; Summers, E.K.; Zubair, S.M.; Lienhard V, J.H. Entropy generation analysis of desalination technologies. Entropy 2011, 13, 1829–1864. [Google Scholar] [CrossRef] [Green Version]
- Simpson, H.C.; Silver, R.S. Technology of Sea Water Desalination. In Proceedings of Desalination Research Conference; National Academy of Sciences, National Research Council Publication: Washington, DC, USA, 1963; Volume 942, pp. 387–413. [Google Scholar]
- Tester, J.W.; Modell, M. Thermodynamics and Its Applications, 3rd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Bejan, A. Advanced Engineering Thermodynamics, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- McCutcheon, J.R.; McGinnis, R.L.; Elimelech, M. Desalination by ammonia—carbon dioxide forward osmosis: Influence of draw and feed solution concentrations on process performance. J. Membr. Sci. 2006, 278, 114–123. [Google Scholar] [CrossRef]
- McGinnis, R.L.; Elimelech, M. Energy requirements of ammonia-carbon dioxide forward osmosis desalination. Desalination 2007, 207, 370–382. [Google Scholar] [CrossRef]
- Bamaga, O.; Yokochi, A.; Zabara, B.; Babaqi, A. Hybrid FO/RO desalination system: Preliminary assessment of osmotic energy recovery and designs of new FO membrane module configurations. Desalination 2011, 268, 163–169. [Google Scholar] [CrossRef]
- McGinnis, R.L.; Hancock, N.T.; Nowosielski-Slepowron, M.S.; McGurgan, G.D. Pilot demonstration of the NH3/CO2 forward osmosis desalination process on high salinity brines. Desalination 2013, 312, 67–74. [Google Scholar] [CrossRef]
- Mistry, K.H.; Mitsos, A.; Lienhard V, J.H. Optimal operating conditions and configurations for humidification-dehumidification desalination cycles. Int. J. Thermal Sci. 2011, 50, 779–789. [Google Scholar] [CrossRef]
- Mistry, K.H.; Narayan, G.P.; Mitsos, A.; Lienhard V, J.H. Optimization of Multi-pressure Humidification-dehumidification Desalination Using Thermal Vapor Compression and Hybridization. In Proceedings of the 21st National & 10th ISHMT-ASME Heat and Mass Transfer Conference; Indian Society for Heat and Mass Transfer and American Society for Mechanical Engineers, Chennai, India, 27–30 December 2011; Number ISHMT_USA_015. pp. 1–9.
- Narayan, G.P.; Sharqawy, M.H.; Summers, E.K.; Lienhard V., J.H.; Zubair, S.M.; Antar, M. The potential of solar-driven humidification-dehumidification desalination for small-scale decentralized water production. Renew. Sustain. Energy Rev. 2010, 14, 1187–1201. [Google Scholar] [CrossRef]
- Narayan, G.P.; Sharqawy, M.H.; Lienhard V., J.H.; Zubair, S.M. Thermodynamic analysis of humidification dehumidification desalination cycles. Desalination Water Treat. 2010, 16, 339–353. [Google Scholar] [CrossRef] [Green Version]
- Narayan, G.P.; John, M.G.S.; Zubair, S.M.; Lienhard V, J.H. Thermal design of the humidification dehumidification desalination system: An experimental investigation. Int. J. Heat Mass Transf. 2013, 58, 740–748. [Google Scholar] [CrossRef]
- Bajpayee, A.; Luo, T.; Muto, A.; Chen, G. Very low temperature membrane-free desalination by directional solvent extraction. Energy Environ. Sci. 2011, 4, 1672–1675. [Google Scholar] [CrossRef]
- Luo, T.; Bajpayee, A.; Chen, G. Directional solvent for membrane-free water desalination—A molecular level study. J. Appl. Phys. 2011, 110, 054905. [Google Scholar] [CrossRef]
- Mistry, K.H.; Lienhard V, J.H. Effect of Nonideal Solution Behavior on Desalination of a Sodium Choloride (NaCl) Solution and Comparison to Seawater. In Proceedings of ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, USA, 9–15 November 2012; American Society of Mechanical Engineers Number IMECE2012-88261.
- Mistry, K.H.; Lienhard V, J.H. Effect of nonideal solution behavior on desalination of a sodium choloride (NaCl) solution and comparison to seawater. J. Energy Resour. Technol. 2013. [Google Scholar] [CrossRef]
- Mistry, K.H.; Hunter, H.A.; Lienhard V, J.H. Effect of composition and nonideal solution behavior on desalination calculations for mixed electrolyte solutions with comparison to seawater. Desalination 2013, 318, 34–47. [Google Scholar] [CrossRef]
- The International Association for the Properties of Water and Steam. Release on the IAPWS Formulation 2008 for the thermodynamic properties of seawater. Berlin, Germany, 2008; 1–19. [Google Scholar]
- Feistel, R. A Gibbs function for seawater thermodynamics for −6 to 80 °C and salinity up to 120 g kg−1. Deep Sea Res. Part I Oceanogr. Res. Pap. 2008, 55, 1639–1671. [Google Scholar] [CrossRef]
- Sharqawy, M.H.; Lienhard V, J.H.; Zubair, S.M. Thermophysical properties of seawater: A review of existing correlations and data. Desalination Water Treat. 2010, 16, 354–380. [Google Scholar] [CrossRef]
- Sharqawy, M.H.; Lienhard V, J.H.; Zubair, S.M. Thermophysical properties of seawater. 2012. Available online: http://web.mit.edu/seawater (accessed on 17 July 2012).
- Moran, M.J. Availability Analysis: A Guide to Efficient Energy Use, corrected ed.; ASME Press: New York, NY, USA, 1989. [Google Scholar]
- Singh, R. Sustainable fuel cell integrated membrane desalination systems. Desalination 2008, 227, 14–33. [Google Scholar] [CrossRef]
- Al-Hallaj, S.; Alasfour, F.; Parekh, S.; Amiruddin, S.; Selman, J.; Ghezel-Ayagh, H. Conceptual design of a novel hybrid fuel cell/desalination system. Desalination 2004, 164, 19–31. [Google Scholar] [CrossRef]
- Liberman, B. Present and Future: Energy Efficient Seawater Desalination. In Presented at International Desalination Association Conference on Desalination: An Energy Solution, Huntington, California, CA, USA, 2–3 November 2010. Number IDA_HB2010-Liberman.
- Banchik, L.D.; Lienhard V, J.H. Thermodynamic Analysis of a Reverse Osmosis Desalination System Using Forward Osmosis for Energy Recovery. In Proceedings of ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, USA, Country, 9–15 November 2012; American Society of Mechanical Engineers Number IMECE2012-86987.
- Post, J.W.; Veerman, J.; Hamelers, H.V.; Euverink, G.J.; Metz, S.J.; Nymeijer, K.; Buisman, C.J. Salinity-gradient power: Evaluation of pressure-retarded osmosis and reverse electrodialysis. J. Membr. Sci. 2007, 288, 218–230. [Google Scholar] [CrossRef]
- Mistry, K.H. Second Law Analysis and Optimization of Humidification-Dehumidification Desalination Cycles. MSc thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2010. [Google Scholar]
- McGinnis, R.L. Nagare, Storrs, USA Personal Communication, 2013.
- Moran, M.J.; Shapiro, H.N. Fundamentals of Engineering Thermodynamics, 6th ed.; John Wiley & Sons, Inc.: New Jersey, NJ, USA, 2007. [Google Scholar]
- Global Water Intelligence. DesalData.com. 2013. Available online: http://desaldata.com (accessed on 1 April 2013).
- Miller, J.E. Review of Water Resources and Desalination Technologies; Technical Report SAND 2003-0800; Sandia National Laboratories: Livermore, CA, USA, 2003. [Google Scholar]
- Crisp, G.J. Actual Energy Consumption and Water Cost for the SWRO Systems at Perth. In Presented at International Desalination Association Conference on Desalination: An Energy Solution, Huntington, California, CA, USA, 2–3 November 2010. Number IDA_HB2010-Crisp.
- Stover, R.L. Isobaric Energy Recovery Technology—History and Future Opportunities. In Presented at International Desalination Association Conference on Desalination: An Energy Solution, Huntington, California, CA, USA, 2–3 November 2010. Number IDA_HB2010-Stover.
- Stover, R.L. Seawater reverse osmosis with isobaric energy recovery devices. Desalination 2007, 203, 168–175. [Google Scholar] [CrossRef]
- Fritzmann, C.; Löwenberg, J.; Wintgens, T.; Melin, T. State-of-the-art of reverse osmosis desalination. Desalination 2007, 216, 1–76. [Google Scholar] [CrossRef]
- Mistry, K.H.; Antar, M.A.; Lienhard V, J.H. An improved model for multiple effect distillation. Desalination Water Treat. 2013, 51, 807–821. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Mistry, K.H.; Lienhard, J.H., V. Generalized Least Energy of Separation for Desalination and Other Chemical Separation Processes. Entropy 2013, 15, 2046-2080. https://doi.org/10.3390/e15062046
Mistry KH, Lienhard JH V. Generalized Least Energy of Separation for Desalination and Other Chemical Separation Processes. Entropy. 2013; 15(6):2046-2080. https://doi.org/10.3390/e15062046
Chicago/Turabian StyleMistry, Karan H., and John H. Lienhard, V. 2013. "Generalized Least Energy of Separation for Desalination and Other Chemical Separation Processes" Entropy 15, no. 6: 2046-2080. https://doi.org/10.3390/e15062046
APA StyleMistry, K. H., & Lienhard, J. H., V. (2013). Generalized Least Energy of Separation for Desalination and Other Chemical Separation Processes. Entropy, 15(6), 2046-2080. https://doi.org/10.3390/e15062046