A Decentralized Heuristic Approach towards Resource Allocation in Femtocell Networks

Abstract
:1. Introduction
- (1)
- We formulate the optimization problem as the maximization of the minimum throughput of the FBSs, by utilizing the joint power assignment and resource allocation.
- (2)
- The two heuristic algorithms are analyzed in a decentralized manner for joint optimization and will mitigate both type inferences that result, i.e., cross-tier and co-tier. Furthermore, the two variants of each PSO and GA are considered for the joint optimization. PSO variants include inertia weight (IW) and constriction factor model (CM), whereas, GA variants include twopoint crossover (TC) and uniform crossover (UC).
- (3)
- Two different scenarios are depicted, i.e., high traffic and low traffic, to evaluate the performance of the proposed algorithms.
- (4)
- Finally, the proposed decentralized algorithms are evaluated in terms of performance metrics: including average objective function, min–max throughput of the femtocells, average throughput of the FUs, outage rate and time complexity.
2. Related Work
3. System Model
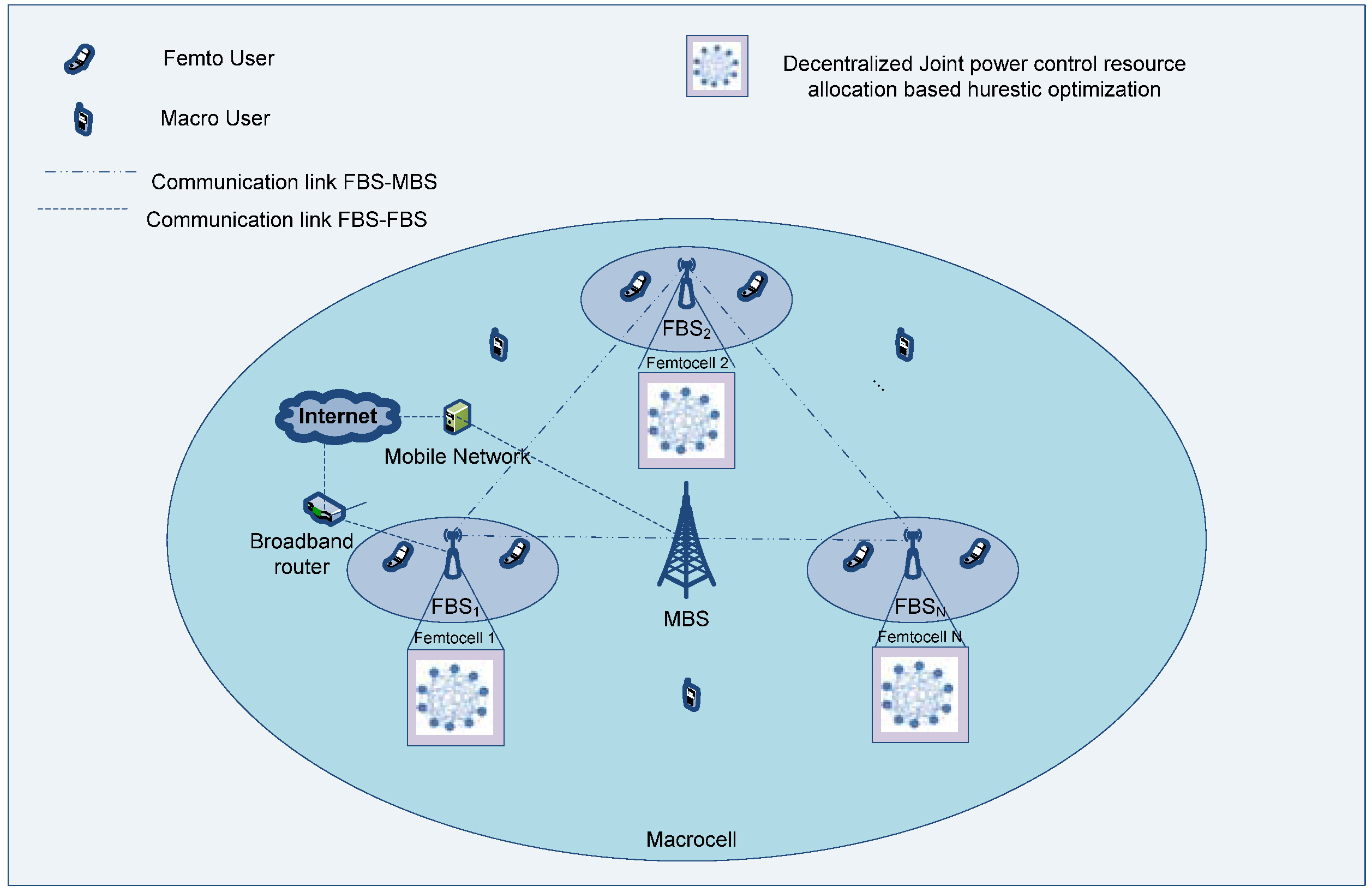
3.1. Proposed Framework

3.2. Network Model and Problem Formulation
3.3. Notation and Assumptions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Meaning |
|---|---|
| FU | Femto user; |
| FBS | Femto base station; |
| MU | Macro user; |
| MBS | Macro base station; |
| l | Number of femtocells within a macrocell; |
| k | Number of FUs; |
| m | Number of available channels; |
| hy,x | Channel gain of the link between xth user and yth FBS; |
| nx | Thermal noise on the xth FU; |
| Cross-tier interference component while association of xth FU with yth FBS; | |
| Co-tier interference component while association of xth FU with yth FBS; | |
| Combined interference; | |
| Ry | Throughput of the yth FBS; |
| P | Particles per FBS; |
4. Particle Swarm Optimization
4.1. Generalized PSO and Its Variants

- ac1 and ac2 are termed as acceleration coefficients whose job is to control the influence in the search process.
- P is the number of particles in a swarm.
- r1 and r2 are two random numbers uniformly distributed in the interval from [0,1].
- Xt, , Vt and represents the current and updated position and velocity of the tth particle.
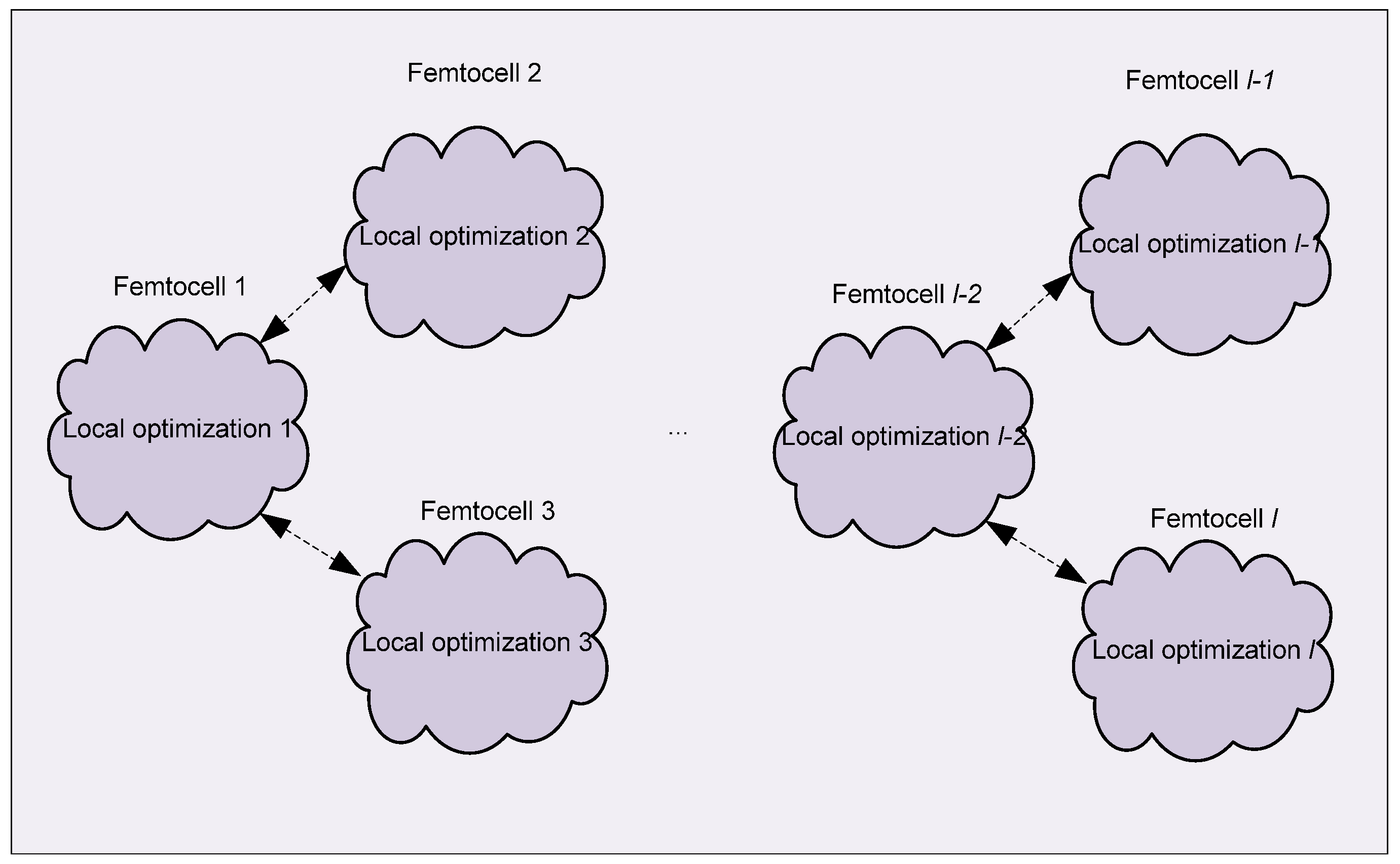
4.2. Decentralized PSO (DPSO)

5. DPSO for Joint Power Assignment and Resource Allocation in Femtocell
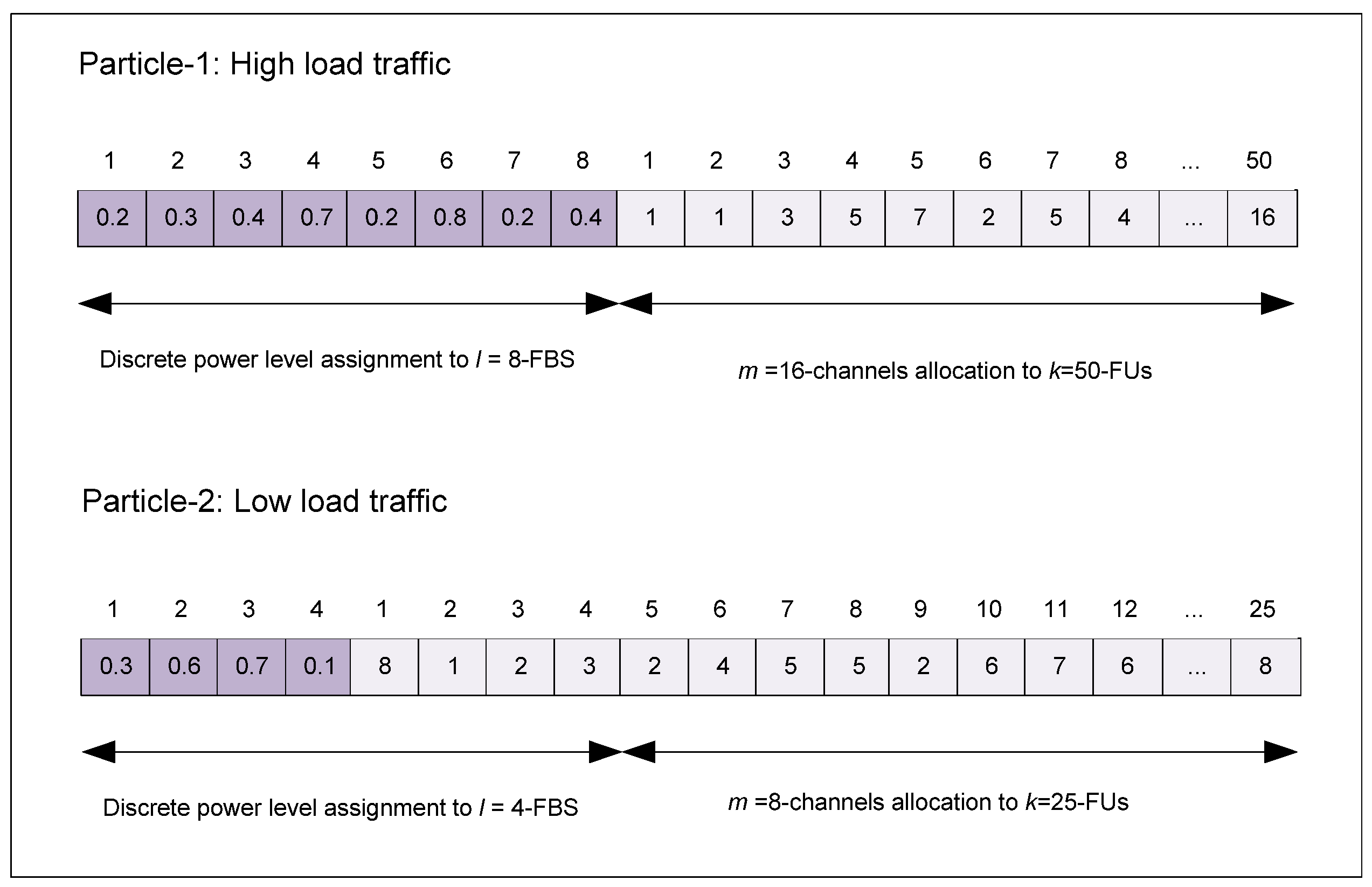
5.1. Particle Encoding

5.2. Fitness Function
- pbest, nbest, X and V: (P, l+m)-dimensional.
- gbestrec: (1, l+m)-dimensional is the best particle received.
- gbest: (l-1, l+m)-dimensional is the local best received particles from l-1 FBS.
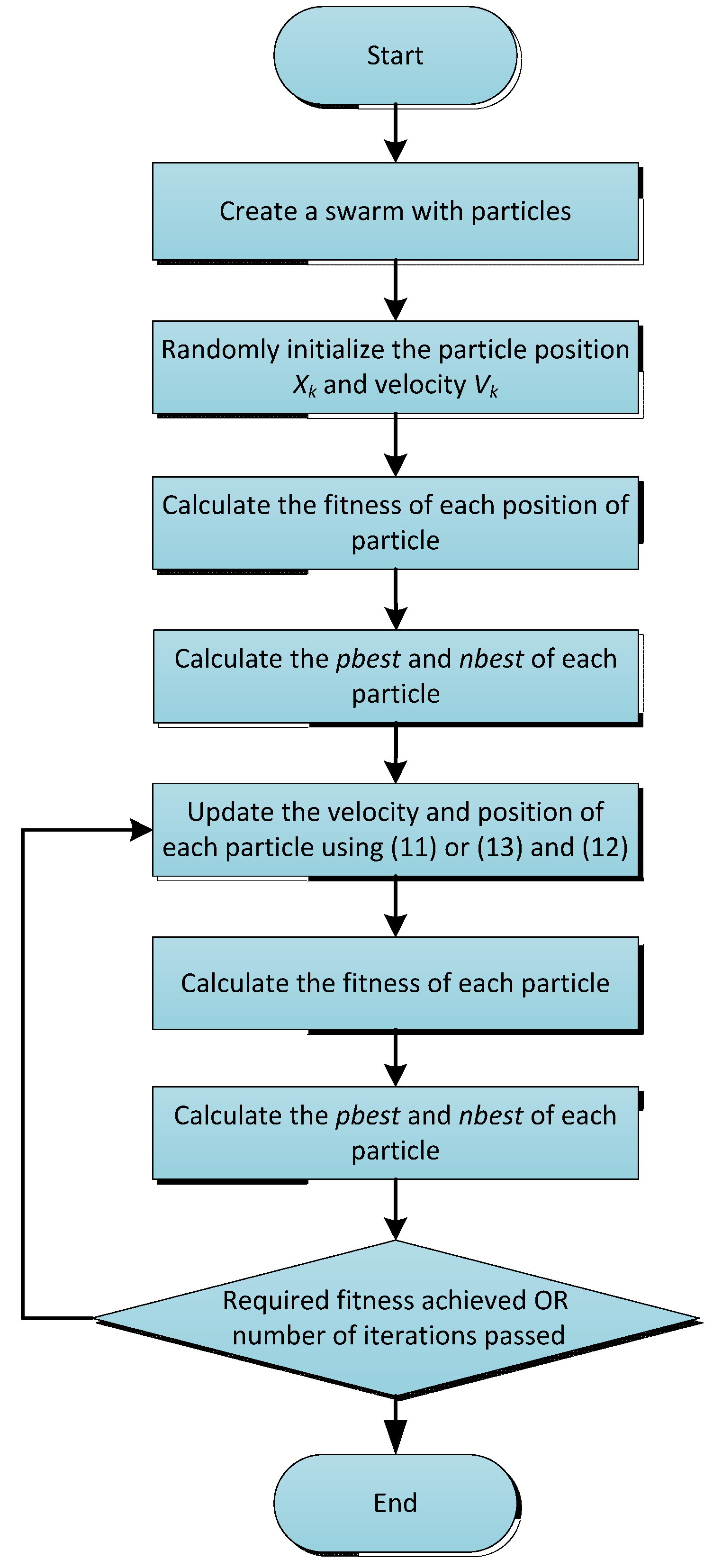
- while (stopping condition (required fitness is achieved OR the number of iteration passed) )
- for each FBSs y do
- for each particle t do
- if fitness(Xt) > fitness(pbestt)% where fitness() is the fitness function (15)
- pbestt ← Xt
- end if
- if fitness(pbestt) > fitness(nbestt)
- nbestt ← pbestt
- end if
- end for
- if nbesty < maximum (gbestr) r = 1,2,3,…,l-1
- X ← gbestrec
- end if
- for each particles t
- Compute new velocity using [ (11) for PSO-IW and (13) for PSO-CM ]
- Compute new position using (12)
- end for
- end for
- end while
- return S ← bestfitness(Xy),
5.3. Update of Velocity and Position
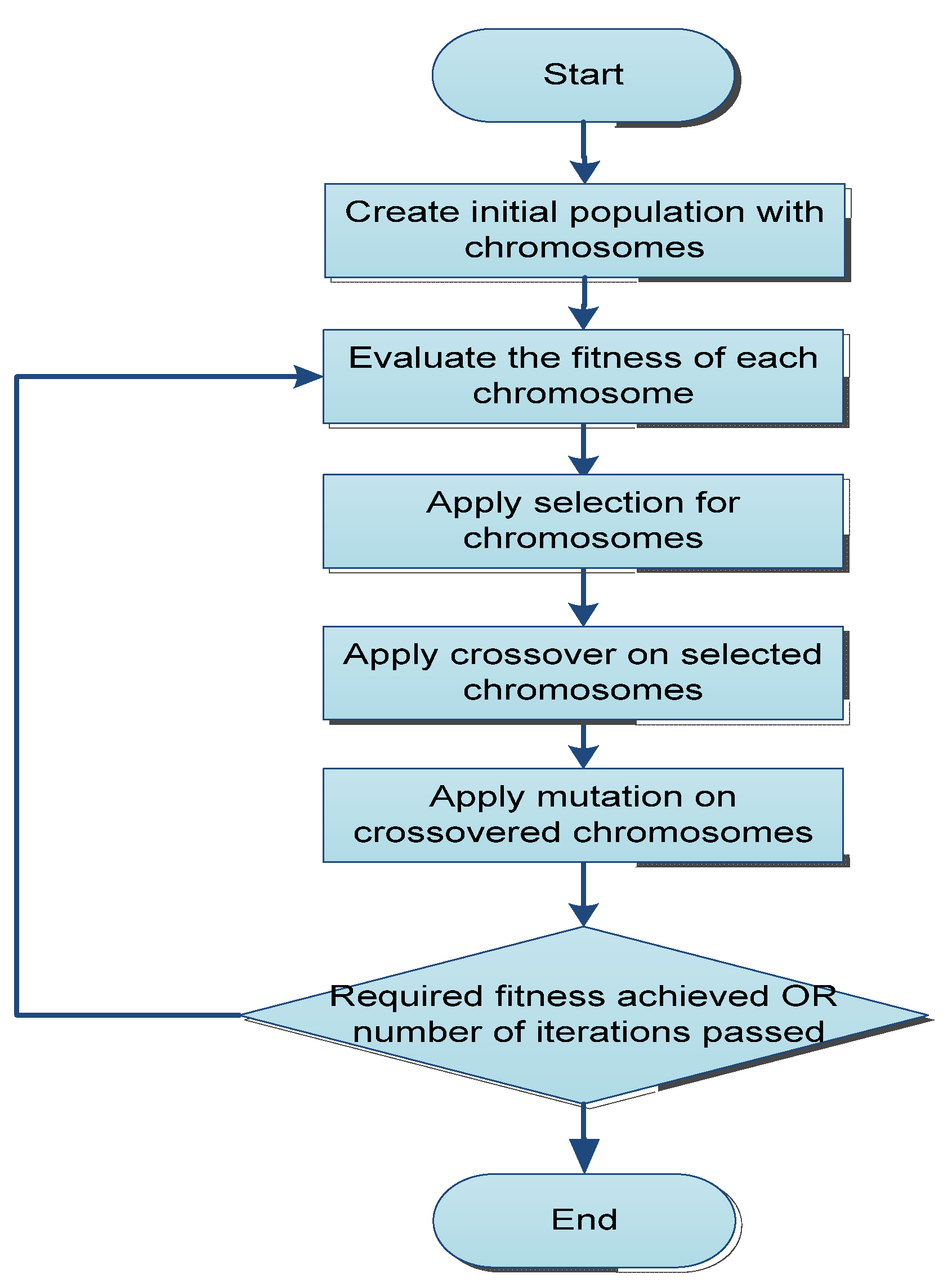
6. Genetic Algorithm
6.1. Generalized GA and Its Variants

6.2. Decentralized GA (DGA)
7. DGA for Joint Power Assignment and Resource Allocation in Femtocell
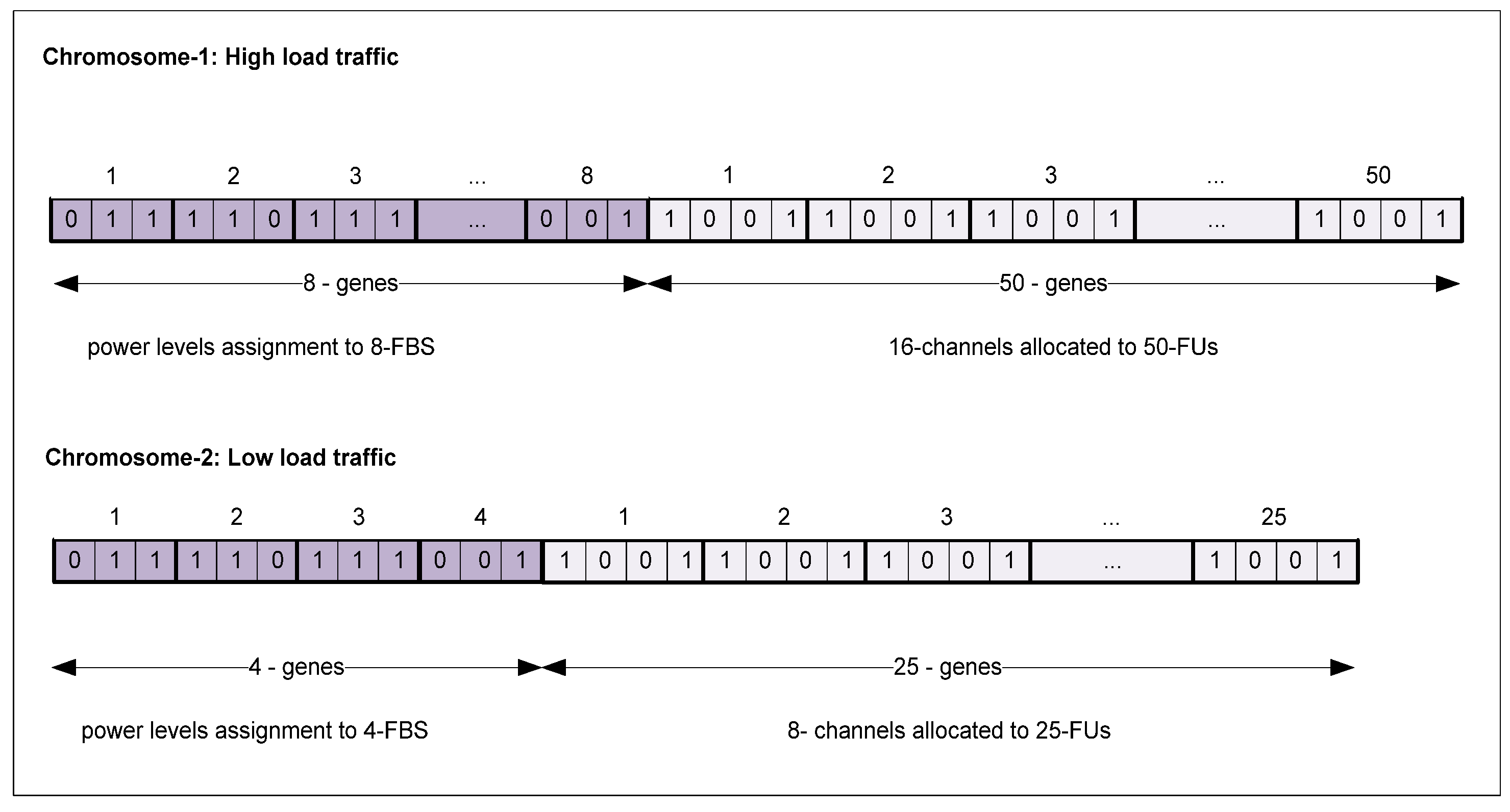
7.1. Chromosome Encoding

7.2. Fitness Computation
7.3. Chromosomes Selection
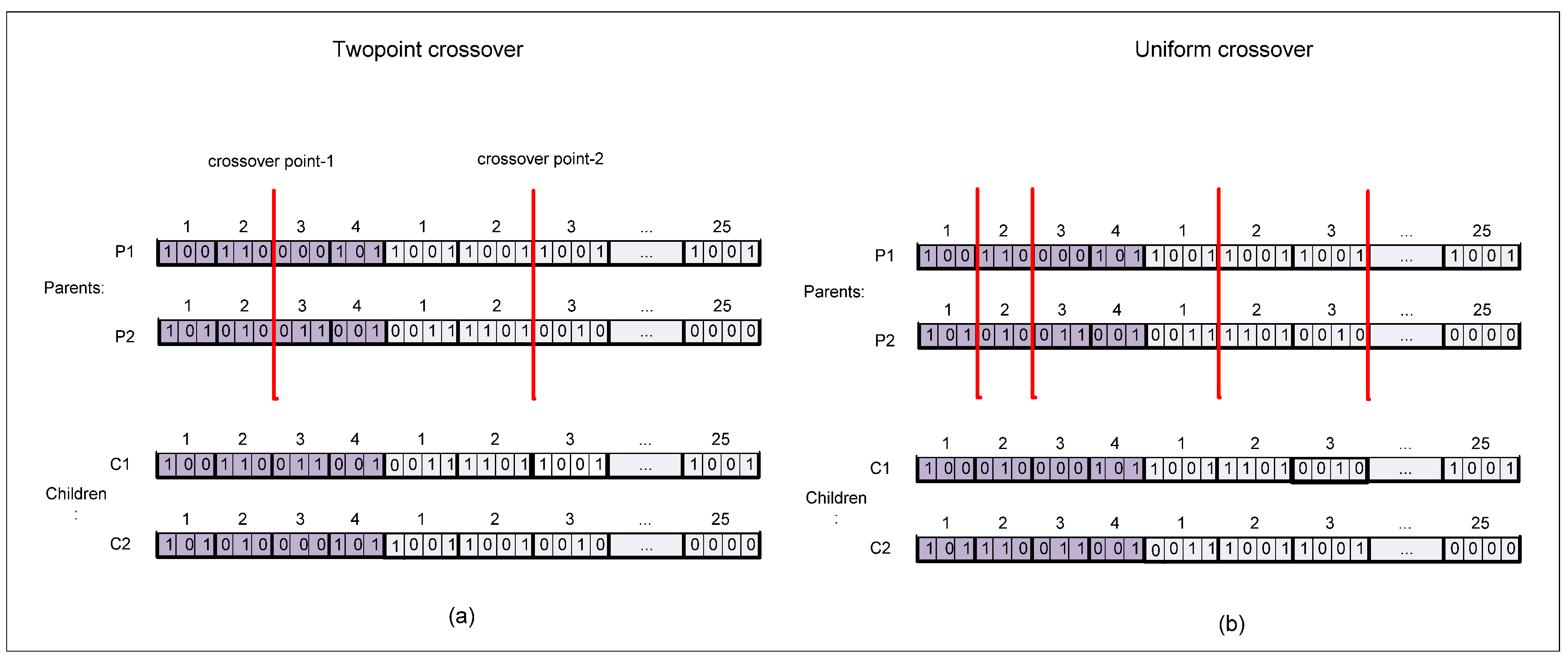
7.4. Crossover Procedure
- X: (P, lnl+mnm)-dimensional.
- Xs and Xnew: (P/2, lnl+mnm)-dimensional.
- pbschrec and lbestchr: (1, lnl+mnm)-dimensional is the best chromosomes received and the local best one.
- while(stopping condition (required fitness achieved OR the number of iteration passed) )
- for each FBSs y do
- Xs ← select half best chromosomes from X: P/2
- lbestchr ← best chromosome(Xs)
- if lbestchr < maximum(recchrr) r = 1,2,3,…,l-1
- Xs ← pbschrec
- end if
- for each chromosomes pair t t P/2
- [Ch1,Ch2]← crossover (Xs1, Xs2)
- [M1,M2] ← mutation (Ch1, Ch2)
- Xnew ← [M1,M2]
- end for
- X ← [Xs, Xnew]
- end for
- end while
- return S←bestchromosome(Xy),
7.5. Mutation

8. Simulation Results
8.1. Parameters Setting
| DGAparameters | Value | DPSO parameters | Value |
|---|---|---|---|
| Population size per FBSs | 16 | Population size per FBSs | 16 |
| Crossover rate | 0.5 | DPSO-IW acceleration coefficients, ac1 and ac2 | 2 |
| Mutation rate | 0.03 | DPSO-IW inertia weight (w) | 0.6 |
| DPSO-CM constriction factor () | 0.7289 | ||
| DPSO-CM acceleration coefficients, ac1 and ac2 | 2.05 | ||
| Vmin, | −N | ||
| Vmax | N |
| Parameters | Value |
|---|---|
| Channel bandwidth | 180 kHz |
| Number of channels | Scenario-1 (16) and Scenario-2 (8) |
| Noise power for femtouser | 4.0049e-15 W |
| Shadowing factor (S) | 8dB |
| Penetration loss in wall (Li) | 5 dB |
| Distance between femtouser and FBS (di,j) | 15m |
| Scenario-1 | Scenario-2 | ||||||
|---|---|---|---|---|---|---|---|
| Channel Allocation to FUs | Power assignment to FBSs | Channel Allocation to FUs | Power assignment to FBSs | ||||
| c1 | u20, u23, u28, u31, u46 | p1 | 0.2W | c1 | u1, u8, u10, u19, u20, u23 | p1 | 0.7W |
| c2 | u5, u15, u21 | p2 | 0.6W | c2 | u2, u4, u6, u14, u18, u24, u25 | p2 | 0.3W |
| c3 | u43 | p3 | 0.8W | c3 | u5, u7, u9, u17 | p3 | 0.2W |
| c4 | u24, u48 | p4 | 0.1W | c4 | u3 | p4 | 0.1W |
| c5 | u39 | p5 | 0.5W | c5 | u11, u13 | ||
| c6 | u10, u12, u16, u33 | p6 | 0.4W | c6 | u12, u16, u22 | ||
| c7 | u9, u14, u22, u26, u38, u42 | p7 | 0.7W | c7 | u15, u21 | ||
| c8 | u1, u37 | p8 | 0.3W | c8 | N.A | ||
| c9 | u30 | ||||||
| c10 | u2, u4, u27, u41 | ||||||
| c11 | u7, u11, u34 | ||||||
| c12 | u13, u29 | ||||||
| c13 | u3, u6, u19, u35, u36 | ||||||
| c14 | u8, u17, u18, u44, u49 | ||||||
| c15 | u25, u32, u45 | ||||||
| c16 | u40, u50 | ||||||
8.2. Results and Discussion
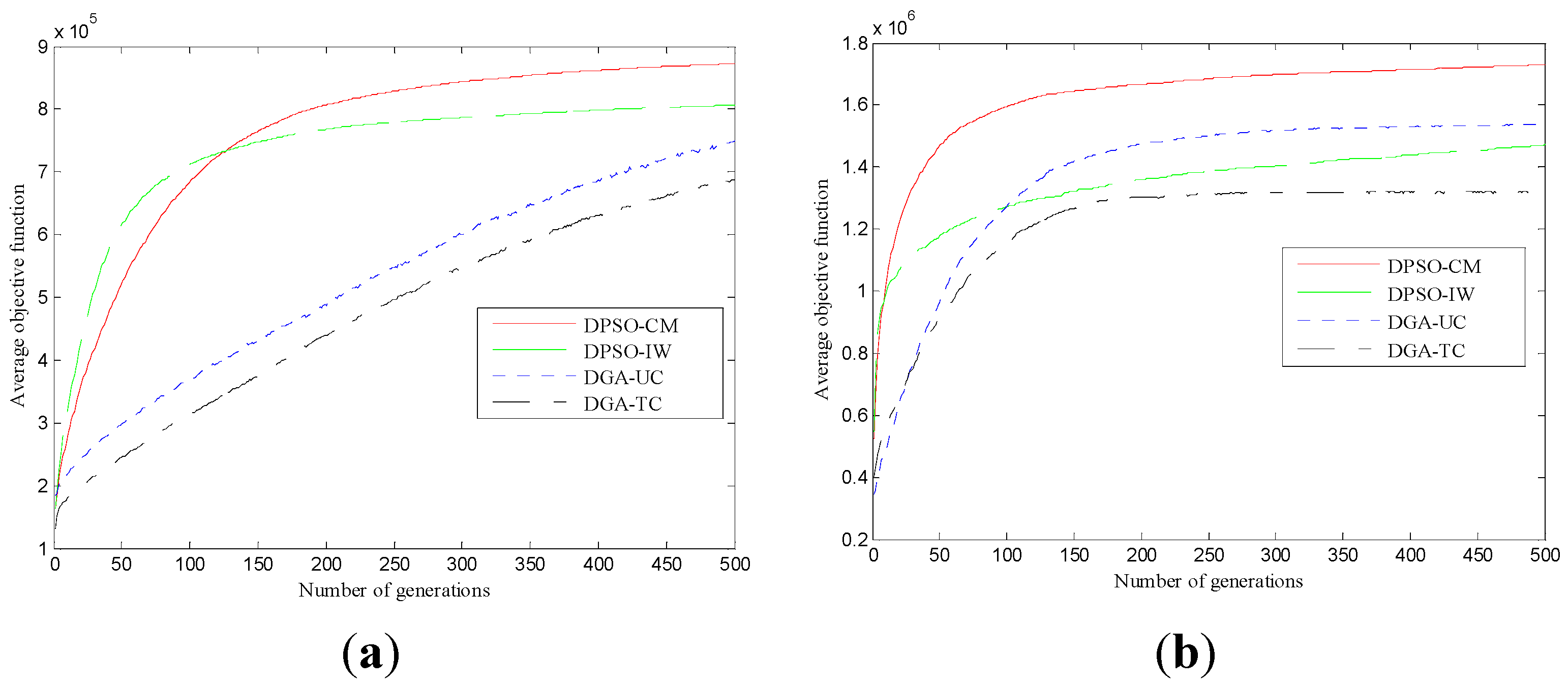
8.2.1. Average Objective Value

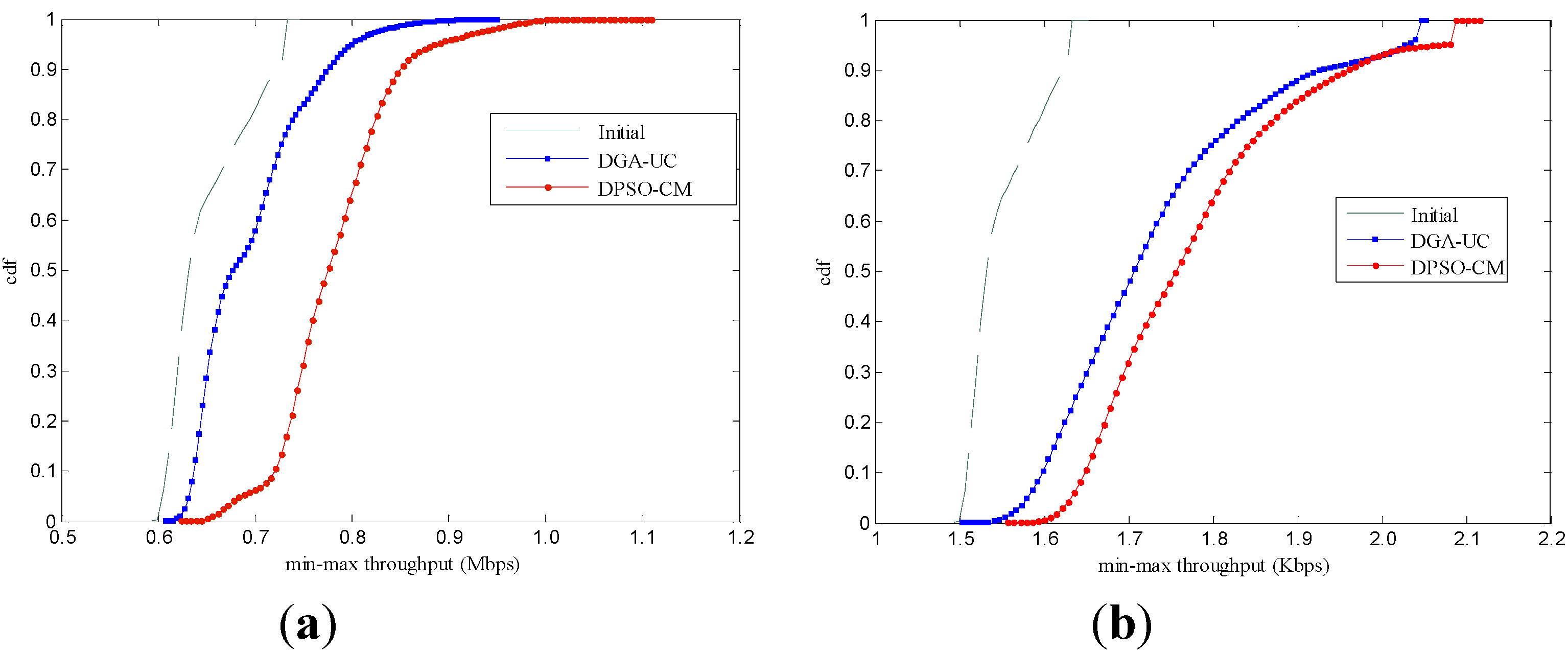
8.2.2. Min-max Throughput of the FBSs

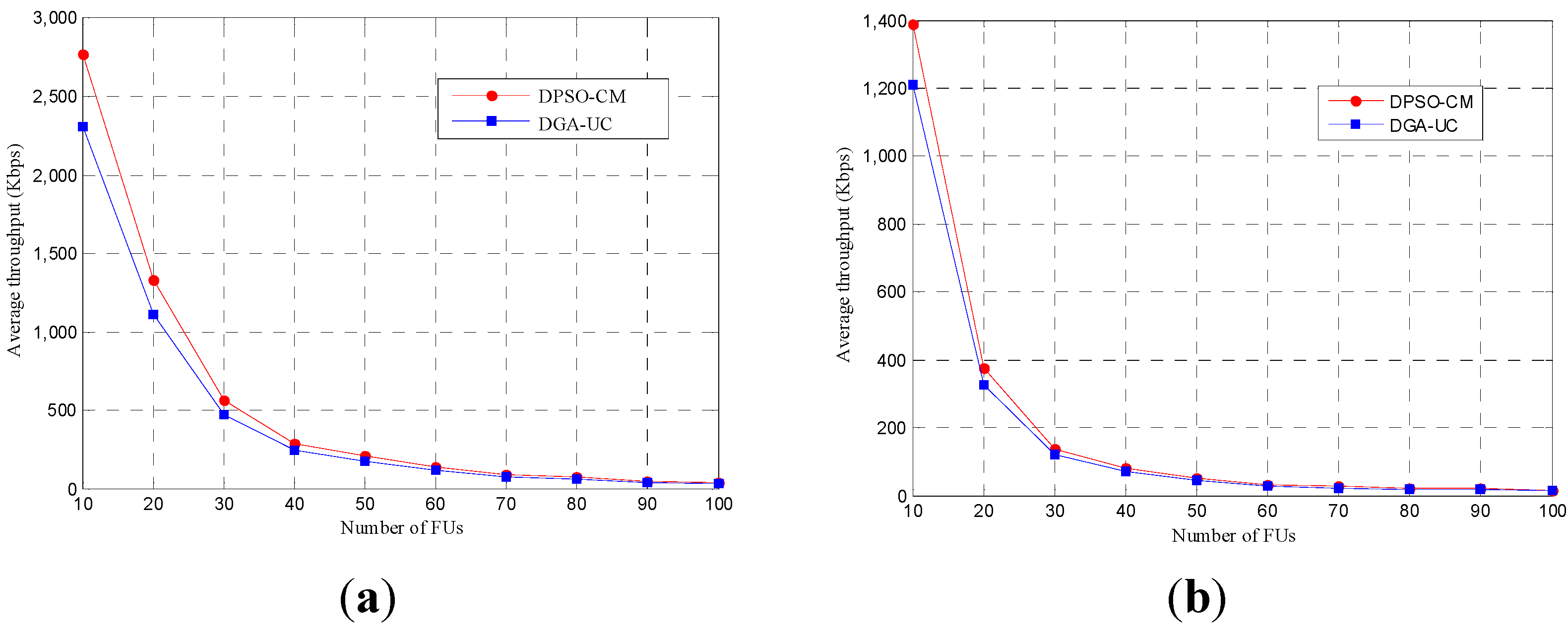
8.2.3. Average FU Throughput

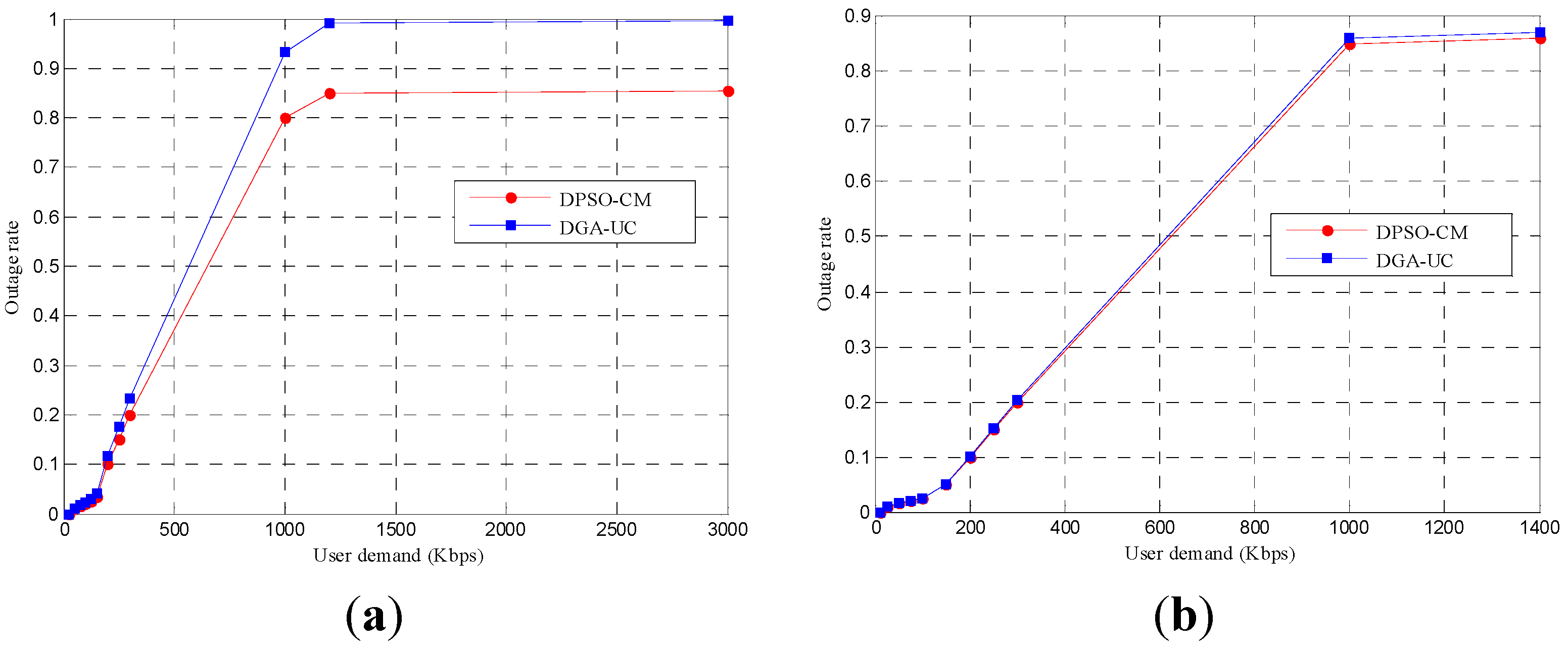
8.2.4. Outage Rate

8.2.5. Time Complexity
| DPSO-CM | DPSO-IW | DGA-UC | DGA-TC | TOB | |||||
| Iterat.# | Time | Iterat. # | Time | Itera. # | Time | Iterat. # | Time | 8 × 105 | |
| Scenario-1 | 100 | 395 | 133 | 526.9 | 850 | 622 | 928 | 679.6 | |
| Scenario-2 | 10 | 0.4 | 12 | 0.6 | 35 | 4.1 | 57 | 5.2 | |
9. Conclusions
Acknowledgement
References
- Mansfield, G. Femtocells in the US Market-Business Drivers and Consumer Propositions. In Proceedings of the Femto Cells Europe Conference, ATT, London, UK, June 2008.
- Chandrasekhar, V.; Andrews, J.G.; Gatherer, A. Femtocell networks: a survey. IEEE Commun. Mag. 2008, 46, 59–67. [Google Scholar] [CrossRef]
- Femtocell-based network enhancement by interference management and coordination of information for seamless connectivity. Available online: http://www.ict-freedom.eu/ (accessed on 26 April 2013).
- Saquib, N.; Hossain, E.; Le, L.B.; Kim, D.I. Interference Management in OFDMA Femtocell Networks: Issues and Approaches. IEEE Wirel. Commun. 2012, 19, 86–95. [Google Scholar] [CrossRef]
- Nakamura, T.; Nagata, S.; Benjebbour, A.; Kishiyama, Y.; Hai, T.; Shen, X.; Ning, Y.; Nan, L. Trends in Small Cell Enhancements in LTE Advanced. IEEE Commun. Mag. 2013, 51, 98–105. [Google Scholar] [CrossRef]
- Mhiri, F.; Sethom, K.; Bouallegue, R. A survey on interference management technique in femtocell sel-organizing network. J. Netw. Comput. Appl. 2013, 36, 58–65. [Google Scholar] [CrossRef]
- Chandrasekhar, V.; Andrews, J.G.; Muharemovict, T.; Shen, Z.K.; Gatherer, A. Power Control in Two-Tier Femtocell Networks. IEEE Trans.Wirel. Commun. 2009, 8, 4316–4328. [Google Scholar] [CrossRef]
- Sarena, B.; Krahenbuhl, L. Fitness sharing and niching methods revisited. IEEE Trans. Evol. Computat. 1998, 2, 97–106. [Google Scholar] [CrossRef] [Green Version]
- Schoeman, I. Niching in Particle Swarm Optimization. Ph.D. thesis, University of Pretoria, Pretoria, South Africa, 2009. [Google Scholar]
- Shao, B.B.M.; Rao, H.R. A parallel hypercube algorithm for discrete resource allocation problems. IEEE Trans. Syst. Man Cybern. A 2006, 36, 233–242. [Google Scholar] [CrossRef]
- Basso, A.; Peccati, L.A. Optimal resource allocation with minimum activation levels and fixed costs. Eur. J. Oper. Res. 2001, 131, 536–549. [Google Scholar]
- Ibaraki, T.; Katoh, N. Resource Allocation Problems: Algorithms Approaches; MIT Press: Boston, MA, USA, 1988. [Google Scholar]
- Benyahia, I. A survey of ant colony optimization algorithms for telecommunication networks. Int. J. App. Metah. Comp. 2012, 3, 18–32. [Google Scholar] [CrossRef]
- Aslam, S.; Lee, K. CSPA: Channel selection and parameter adaption scheme based on genetic algorithm for cognitive radio ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2012. [Google Scholar] [CrossRef]
- Marshoud, H.; Otrok, H.; Barada, H.; Estrada, R.; Jarray, A.; Dziong, Z. Resource Allocation in macrocell-femtocell network using genetic algorithm. In Proceedings of the IEEE Wireless Communication and Mobile Computing, WiMob, Barcelona, Spain, 8–10 October 2012; pp. 474–479.
- Li, Z.; Guo, S.; Li, W.Z.; Lu, S.L.; Chen, D.X.; Leung, V.C.M. A Particle swarm optimization algorithm for resource allocation in femtocell networks. In Proceedings of the IEEE Wireless Communication and Networking Conference, WCNC, Paris, France, 1–4 April 2012; pp. 1212–1217.
- Mohjazi, L.; Al-Qutayri, M.; Barada, H.; Poon, K.F. Performance evaluation of heuristic techniques for coverage optimization in femtocells. In Proceedings of IEEE Electronics, Circuits and Systems, ICECS, Beirut, Lebanon, 11–14 December 2011; pp. 587–590.
- Gen, C.; Dacheng, Y.; Xuan, Y.; Zhang, X. A downlink joint power control and resource allocation scheme for co-channel macrocell-femtocell networks. In Proceedings of IEEE Wireless Communication and Networking Conference, WCNC, Quintana-Roo, Mexico, 28–31 March 2011; pp. 281–286.
- Sadr, S.; Adve, R. Hierarchical resource allocation in femtocell network using graph algorithm. In Proceedings of IEEE Conference on Communications, ICC, Ottawa, Canada, 10–15 June 2012; pp. 4416–4420.
- Da Costa, G.W.O.; Cattoni, A.F.; Roig, V.A.; Mogensen, P.E. Interference mitigation in cognitive femtocells. In Proceedings of IEEE GLOBECOM Workshop, Miami, FL, USA, 6–10 December 2010; pp. 721–725.
- Barbarossa, S.; Sardellitti, S.; Carfagna, A.; Vecchiarelli, P. Decentralized interference management in femtocells: a game theoretic approach. In Proceedings of IEEE CROWNCOM, Cannes, France, 9–11 June 2010; pp. 1–5.
- Wang, B. Distributed resource allocation and performance optimization for video communication over mesh networks based on swarm intelligence. Ph.D. thesis, University of Missouri, Columbia, MO, USA, 2007. [Google Scholar]
- Izakian, H.; Abraham, A.; Snášel, V. Metaheuristic Based Scheduling Meta-Tasks in Distributed Heterogeneous Computing Systems. Sensors 2009, 9, 5339–5350. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Clerc, M. The Swarm and the Queen: Towards a Deterministic and Adaptive Particle Swarm Optimization. In Proceedings of the Congress on Evolutionary Computation, Washington, DC, USA, 6–9 July 1999; pp. 1951–1957.
- Balin, S. Non-identical parallel machine scheduling using genetic algorithm. Expert Syst. Appl. 2011, 38, 6814–6821. [Google Scholar] [CrossRef]
- Yun, J.-H.; Shin, K.G. A self-organizing femtocell management architecture for co-channel deployment. In Proceedings of IEEE International Conference on Mobile Computing and Networking, MobiCom, Chicago, Illinois, USA, 20–24 September 2010; pp. 61–72.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Shahid, A.; Aslam, S.; Lee, K.-G. A Decentralized Heuristic Approach towards Resource Allocation in Femtocell Networks. Entropy 2013, 15, 2524-2547. https://doi.org/10.3390/e15072524
Shahid A, Aslam S, Lee K-G. A Decentralized Heuristic Approach towards Resource Allocation in Femtocell Networks. Entropy. 2013; 15(7):2524-2547. https://doi.org/10.3390/e15072524
Chicago/Turabian StyleShahid, Adnan, Saleem Aslam, and Kyung-Geun Lee. 2013. "A Decentralized Heuristic Approach towards Resource Allocation in Femtocell Networks" Entropy 15, no. 7: 2524-2547. https://doi.org/10.3390/e15072524
APA StyleShahid, A., Aslam, S., & Lee, K. -G. (2013). A Decentralized Heuristic Approach towards Resource Allocation in Femtocell Networks. Entropy, 15(7), 2524-2547. https://doi.org/10.3390/e15072524