The natural and simplest possible extension of the MEP hypothesis to a time varying problem is to maximize the entropy production integrated over time. This turns out to be rather straightforward as illustrated below.
3.1. The Model Equations
In order to write a time dependent version of Equations (3) and (4), we need to relax the stationarity assumption. In fact, in the general case, we can substitute the
γi from Equation (1) in order to obtain a new Lagrange function:
where all variables are now functions of time. The summation is now over space (discrete index
i) and over time (continuous variable
t). Though not in the context of seasonal variations, a rather similar formulation was suggested earlier [
17] where the maximisation of entropy production was performed at each time step in a simple model, in order to investigate the notion of dynamical stability of the MEP equilibrium. It should be emphasized that
β =
β(
t) must depend of time, since the heat convergences
γi should sum up to zero at all time. In other words, the “heat transports through time” are explicitly and solely given by
ci dTi/dt while “through space” we have both explicit heat fluxes associated with
Ri(
Tk) and implicit ones with
γi. The Lagrange function is now a functional of both
Ti and its time derivative
T'i =
dTi/dt. This new variational problem is well-known in classical mechanics, and the solution is given by the Euler-Lagrange equations. This leads to:
with
β' =
dβ/dt. These equations are very similar to Equations (3) and (4) and formally their resolution is similar. For a given function
β(
t), we can obtain its time-derivative
β'(
t) and we thus can solve system Equation (8) to obtain the temperatures
Ti(
t) at each point
i. After substitution in Equation (9) we obtain a differential equation in
β(
t),
β'(
t) and
β"(
t), whose resolution solves the problem. In order to get some insight into this solution, we will use the above linear approximation for the radiative functions. We will also assume that the system under consideration is homogeneous, in the sense that the ratio
ci/
bi is here a fixed constant
a. Note that
a is a time which represents the thermal inertia of the system. In this particular situation, we get a very simple solution for the system of Equation (8):
where
α =
α(
t) is the inverse square root of
β(
t) −
a β'(
t). After substitution into Equation (9) we get a simple linear differential equation for
α(
t), whose solution will therefore solve the problem:
where
T'0i is the time derivative of
T0i. Note that Equations (10) and (11) are quite similar to their stationary equivalents in Equations (5) and (6).
There are two time scales in this equation. The first time scale is given by 1/τ~T'0i/T0i, i.e., the speed of external changes. The second one is the constant a which reflect the thermal inertia of the medium. In particular, when the heat capacities ci, and therefore the constant a, are vanishingly small, we obtain a “quasi-stationary” solution: we get the exact same formula as in Equations (5) and (6), though here the temperatures T0i(t) are assumed to depend on time. This is equivalent to the “quasi-static” approximation used in classical thermodynamics.
We can also consider the opposite situation with the thermal inertia
a being extremely large. In this case, Equation (11) becomes:
In other words, the temperatures will readjust rapidly to the changing forcing T0i(t) through the global function α∞(t) given by Equation (12), even if the heat capacities are infinite. This does not seem physically very relevant, and we are here probably outside the validity range of the MEP hypothesis. As we will see below, this adjustment may be interpreted in terms of (potentially unrealistically) large “implicit heat fluxes” that will enforce a maximum entropy production. This is illustrated in the following example.
3.2. The Two-Box Case with a Step Change
As a proof of concept for time varying problems, we will first discuss the two-box situation when submitted to a step-like change at some given time
t = 0. This will allow for a much simpler discussion of the physical relevance of the model. To avoid discontinuities, we will use an hyperbolic tangent to represent a change that will occur over a characteristic time
τ:
The model will jump from one equilibrium {
T1S,
T2S} at the start (for large negative times) to a new one {
T1E,
T2E} at the end (for large positive times), as given in the previous section, with a transition near time
t = 0 obtained by solving Equation (11), thus giving the time evolution {
T1(
t),
T2(
t)}. As discussed above, we might also be interested in the limit case
a = 0 (“quasi-stationary” or “quasi-static” solution) that will be called {
T01(
t),
T02(
t)}, and in the limit case
a = ∞, noted below {
T∞1(
t),
T∞2(
t)}.
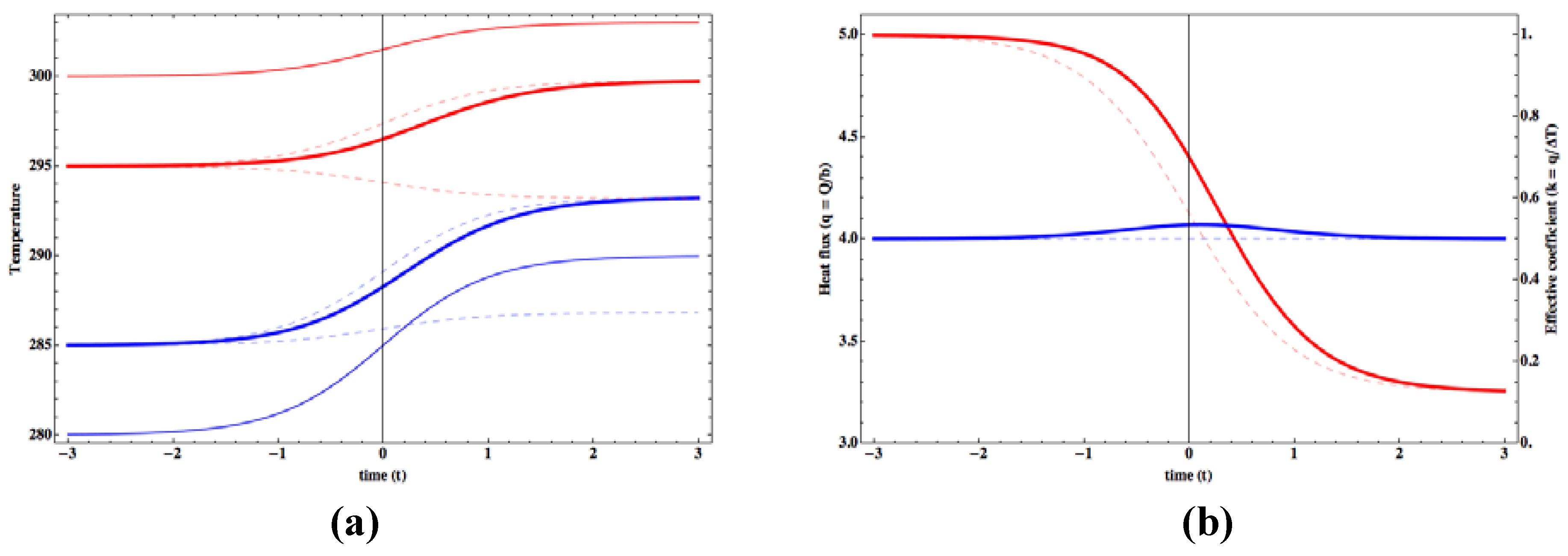
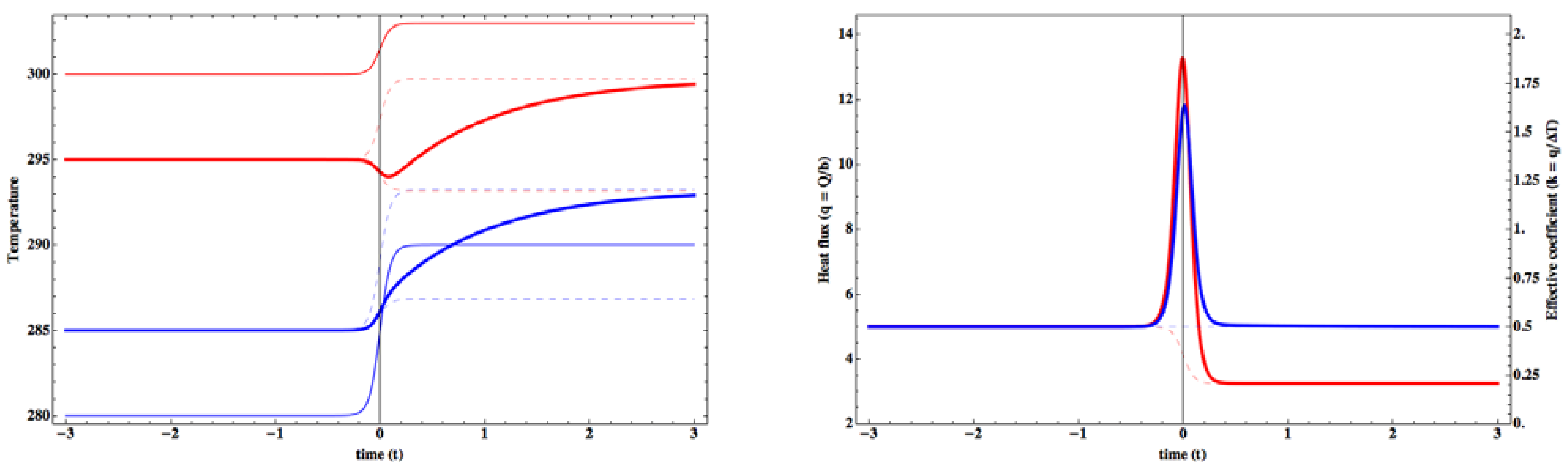
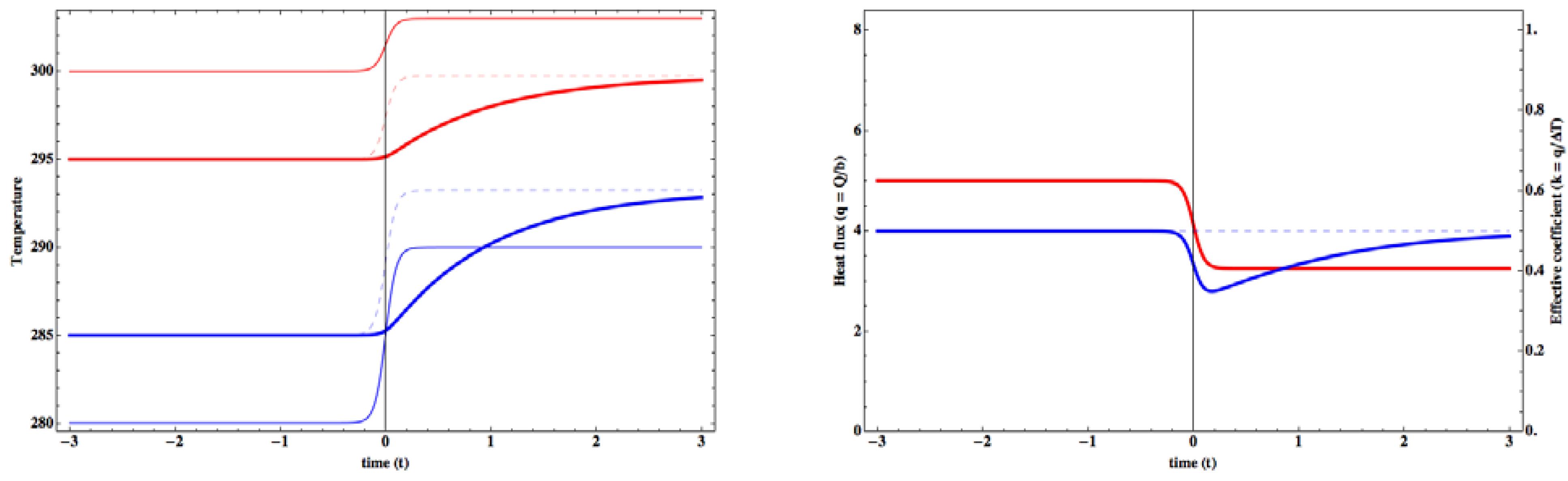
Figure 4 below is presenting the results obtained for
a smaller than
τ. We see that the computed solution behaves as expected, jumping from one equilibrium to the other, with a time delay of order
a when compared to the “quasi-static” solution {
T01(
t),
T02(
t)}. The implicit heat flux
Q between the two boxes also behaves as expected, changing from large values when the temperature gradient is large at the beginning, to smaller ones when the gradient is reduced. It is worth emphasizing that, in contrast to traditional models, there is here no
a priori link between
Q and the temperature gradient (
T1 −
T2). It is possible to define
a posteriori a heat exchange coefficient
k as
k =
Q/(
T1 −
T2). In traditional models, this ratio is severely constrained by some dynamical processes or even fixed. Here, its time evolution can therefore be used to track possible inconsistencies. In
Figure 4b, changes in
k are rather smooth and small. In the quasi-stationary case (dotted blue line), changes in
k are vanishingly small (they are second order in ∆
T/
T).
Figure 4.
(a) The time evolution of the two-box temperatures {T1(t),T2(t)} (thick lines, T1 in red and T2 in blue) together with the corresponding external forcing {T01(t),T02(t)} (thin lines). The limit solutions {T01(t),T02(t)} and {T∞1(t),T∞2(t)} are represented by dashed lines. (b) The corresponding heat flux q = (Q/b) = (T01 − T1) − a T'1 (thick red line) and the ratio q/(T1 − T2) (thick blue), with the quasi-stationary solution as dashed lines. Here we have used T01S = 300 K, T02S = 280 K, T01E = 303 K, T02E = 290 K, τ = 1 and a = 0.3.
Figure 4.
(a) The time evolution of the two-box temperatures {T1(t),T2(t)} (thick lines, T1 in red and T2 in blue) together with the corresponding external forcing {T01(t),T02(t)} (thin lines). The limit solutions {T01(t),T02(t)} and {T∞1(t),T∞2(t)} are represented by dashed lines. (b) The corresponding heat flux q = (Q/b) = (T01 − T1) − a T'1 (thick red line) and the ratio q/(T1 − T2) (thick blue), with the quasi-stationary solution as dashed lines. Here we have used T01S = 300 K, T02S = 280 K, T01E = 303 K, T02E = 290 K, τ = 1 and a = 0.3.
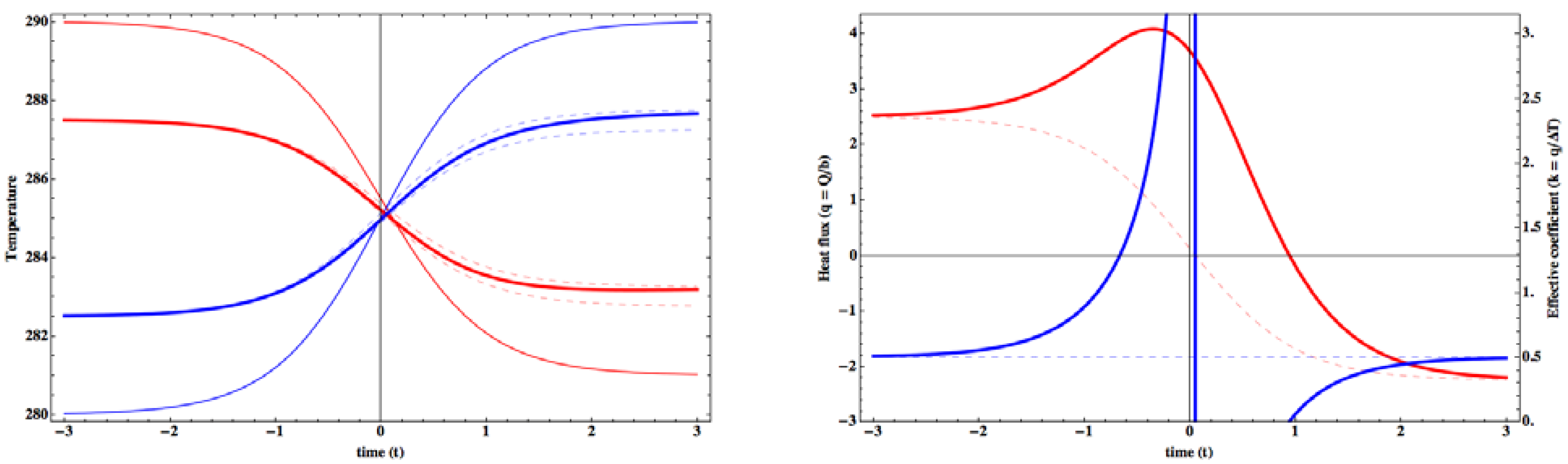
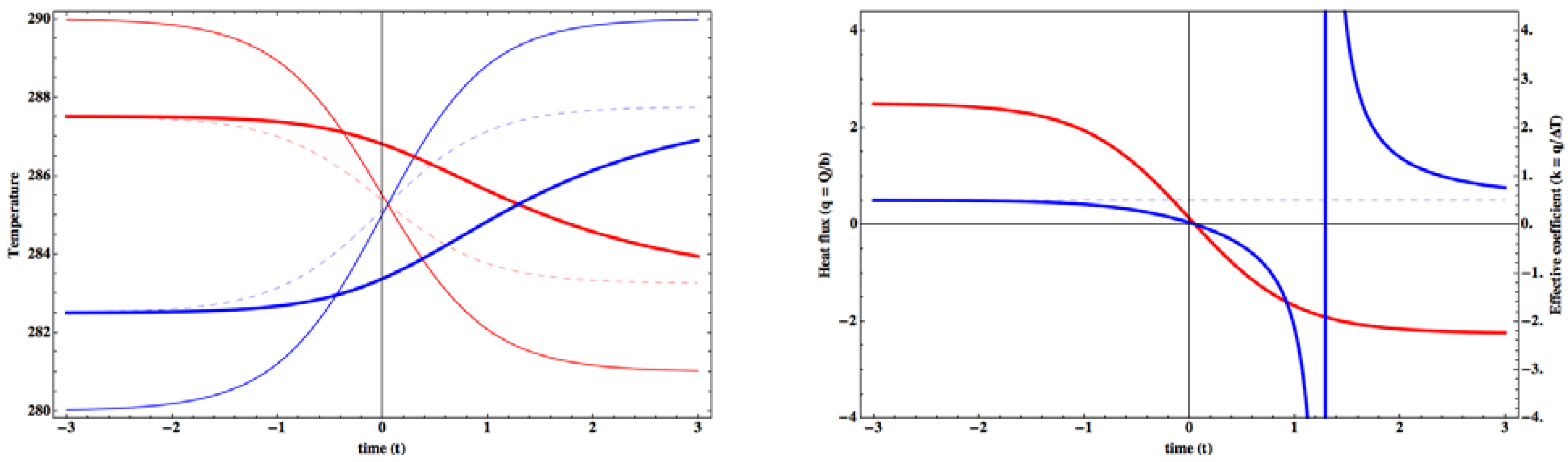
A rather different behaviour is observed in
Figure 5, when the transition is much more abrupt. Here the solution
T1(
t) first decreases, which is physically quite unexpected since both external forcings correspond to warming. In fact
T1(
t) is first following the
T∞1(
t) limit solution before converging slowly towards the equilibrium
T1E. The corresponding heat flux shows a very large transient associated with the rapid change in the forcing, that cannot be absorbed by the heat reservoirs due to the large heat capacities. Accordingly, changes in
k are also very large and abrupt.
But an even more interesting behaviour is obtained in
Figure 6. Here, we are in a quasi-symmetrical situation, with the warm box being cooled, and the cold box being warmed by approximately the same amount. Even when using a very large thermal inertia
a, we observe that there is almost no time lag between the external forcing
T0i(
t) and the model response. In fact, independently of the thermal inertia, the two limit solutions
T0i(
t) and
T∞i(
t) become very close. In case of perfect symmetry, the difference simply vanishes. Indeed, in this case, it can be seen in Equation (12) that the solution
α∞(
t) is a constant. This implies that the global inverse temperature
β(
t) is also a constant, and in fact the same constant as in the quasi-stationary situation. In other words, the “global temperature
Tg” does not change, whatever the internal thermal inertial time scales. Again, this is obviously not quite physically relevant. Interestingly, the effect of thermal inertia is fully transfered to the implicit heat flux
Q, and the effective coefficient
k diverges and becomes negative, as shown on
Figure 6b.
Figure 5.
Same as
Figure 4, with
τ = 0.1 and
a = 1.0.
Figure 5.
Same as
Figure 4, with
τ = 0.1 and
a = 1.0.
Figure 6.
Same as
Figure 4, with
T01S = 290 K,
T02S = 280 K,
T01E = 281 K,
T02E = 290 K,
τ = 1 and
a = 1.5.
Figure 6.
Same as
Figure 4, with
T01S = 290 K,
T02S = 280 K,
T01E = 281 K,
T02E = 290 K,
τ = 1 and
a = 1.5.
It should be emphasized that, within the MEP principle, there is no a priori reason to constrain k in any way. For instance, in a meteorological context it is possible to transport heat “uphill” from cold to warmer regions, through latent heat or mechanical energy transports. The MEP principle suggests that such apparent local or temporary violations of the Second Law are favoured when the corresponding global entropy production is increased. But obviously, it is necessary to discuss the physical relevance of such cases. The alternative is to enforce additional constraints (e.g., positivity of k): this is also quite straightforward in the MEP context as we will show later.
3.3. The Two-Box Case with a Seasonal Cycle
Our initial motivation is linked to the representation of the seasonal cycle in a MEP climate model. In this case, the forcing time scale is one year, whereas the largest thermal inertia is associated with ocean mixed layer, with a typical value of
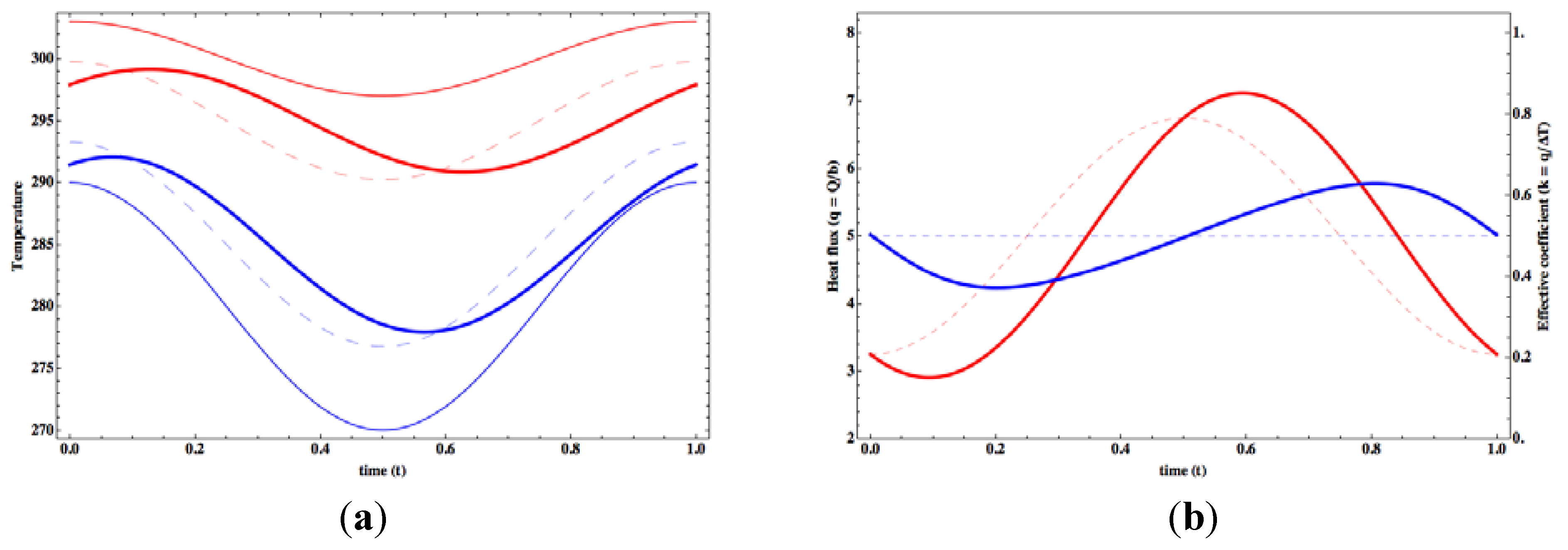
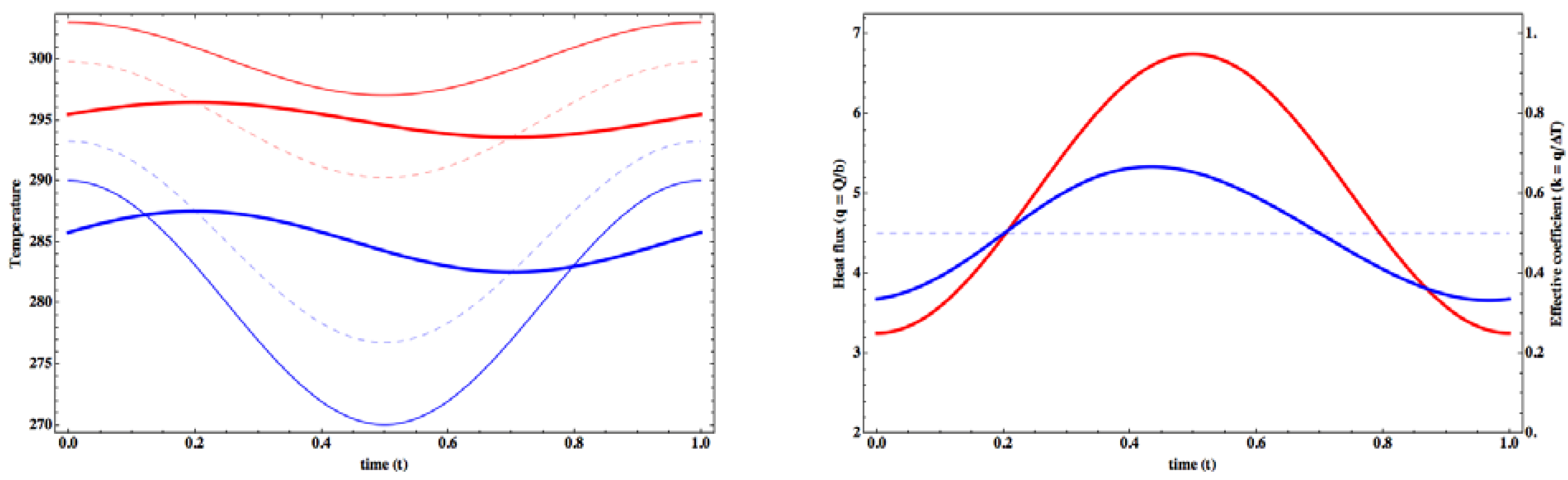
a of the order of about two weeks to a month. A priori, we are here in the situation where inertial time scales are smaller than the forcing changes. This is indeed the case in
Figure 7 where we have used a simple sinusoidal forcing given by (in Kelvin):
As expected, the resulting temperatures {T1(t),T2(t)} lag the forcing with a time scale of order a. The amplitude of the response is slightly smaller than in the quasi-stationary case (i.e., without thermal inertia), as expected from a damped response. As before, there is a consistent, though non constant, relationship between the heat flux Q and the temperature gradient (T1 − T2), with a larger flux when the gradient is larger.
Figure 7.
(a) The time evolution of the two-box temperatures {T1(t),T2(t)} (thick lines, T1 in red and T2 in blue) together with the corresponding external forcing {T01(t),T02(t)} (thin lines) and the quasi-stationary solution (dashed lines). T01 = 300 K, ∆T01 = 3 K, T02 = 280 K, ∆T02 = 10 K; (b) The corresponding heat flux q = (Q/b) = (T01 − T1) − a T'1 (thick red line) and the ratio q/(T1 − T2) (thick blue), with the quasi-stationary solution as dashed lines. Here we have used a = 0.1.
Figure 7.
(a) The time evolution of the two-box temperatures {T1(t),T2(t)} (thick lines, T1 in red and T2 in blue) together with the corresponding external forcing {T01(t),T02(t)} (thin lines) and the quasi-stationary solution (dashed lines). T01 = 300 K, ∆T01 = 3 K, T02 = 280 K, ∆T02 = 10 K; (b) The corresponding heat flux q = (Q/b) = (T01 − T1) − a T'1 (thick red line) and the ratio q/(T1 − T2) (thick blue), with the quasi-stationary solution as dashed lines. Here we have used a = 0.1.
When the thermal inertia is larger, as illustrated in
Figure 8, for
a = 0.5,
i.e., when the thermal inertia time constant is equal to half the periodicity of the forcing, we observe that the lags are very different in the cold box and in the warm one. Again, this appears to be a quite non-physical result. We note also that the induced heat flux
Q and therefore also the ratio
Q/(
T1 −
T2) become negative during the cycle, with heat flowing from the cold reservoir towards the warm one.
Figure 8.
Same as
Figure 7, with
a = 0.5.
Figure 8.
Same as
Figure 7, with
a = 0.5.
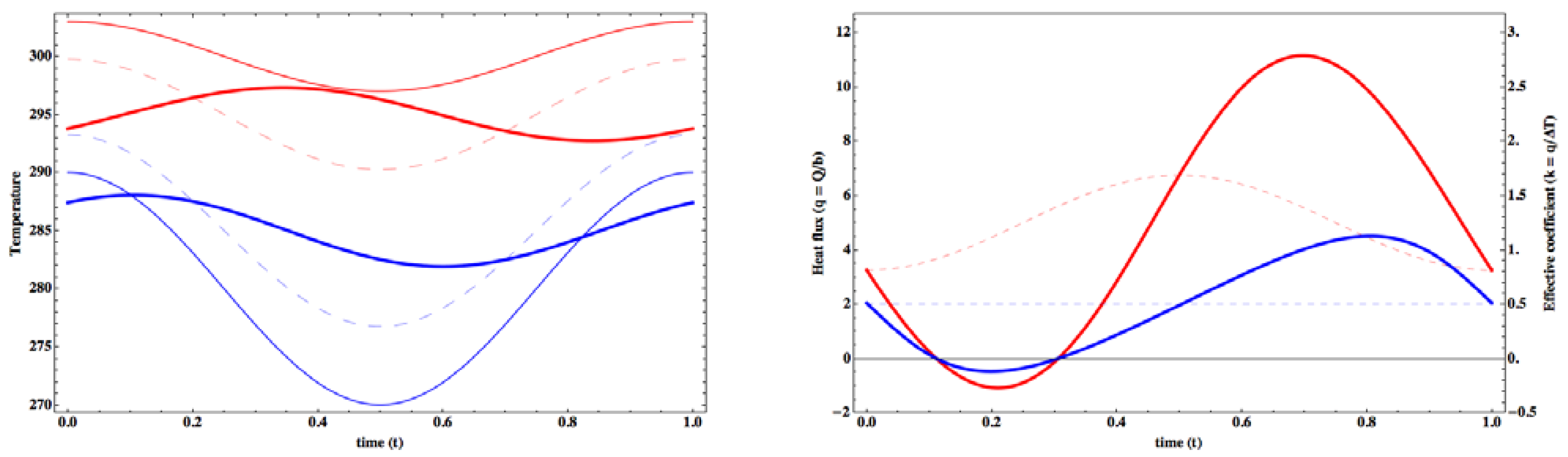
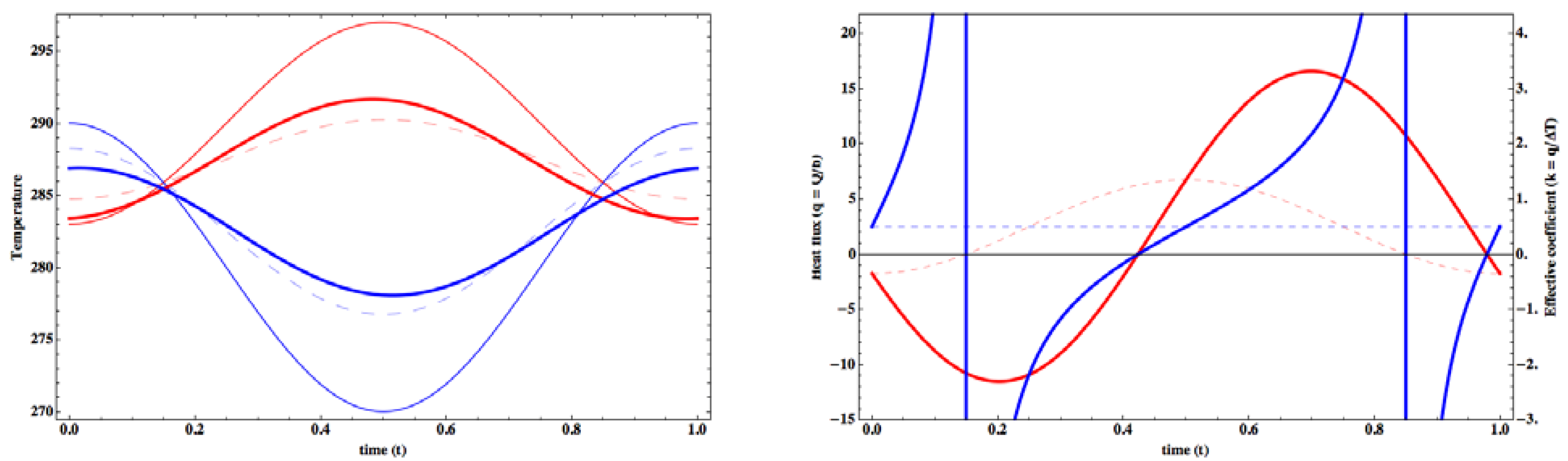
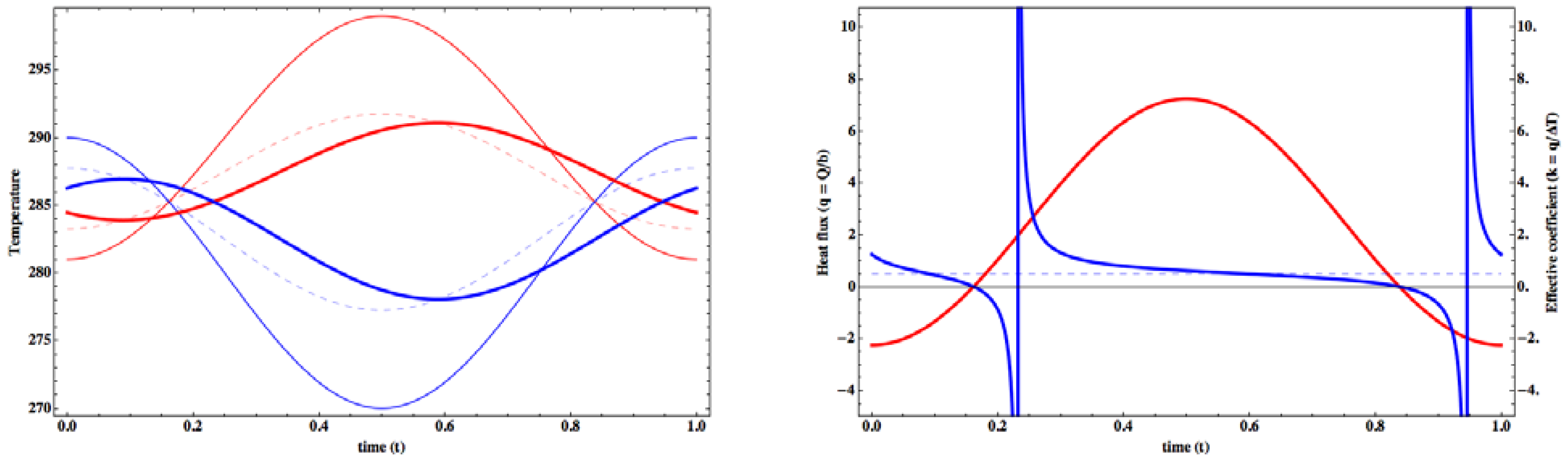
But again, the most interesting situation is the almost symmetrical one shown in
Figure 9. As in the step-like situation, there is no more lag between forcing and response. This is again due to an almost constant “global temperature”
Tg = 1/
β. The rather large thermal inertia leads to quite unrealistic heat fluxes.
Figure 9.
Same as
Figure 7, with
T01 = 290 K, ∆
T01 = −9 K,
T02 = 280 K, ∆
T02 = 10 K,
a = 0.5.
Figure 9.
Same as
Figure 7, with
T01 = 290 K, ∆
T01 = −9 K,
T02 = 280 K, ∆
T02 = 10 K,
a = 0.5.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













