
Fractional-Order Identification and Control of Heating Processes with Non-Continuous Materials

 ,
, 
Abstract
:1. Introduction
2. Fractional Theoretical Model
3. Fractional Experimental Model Identification
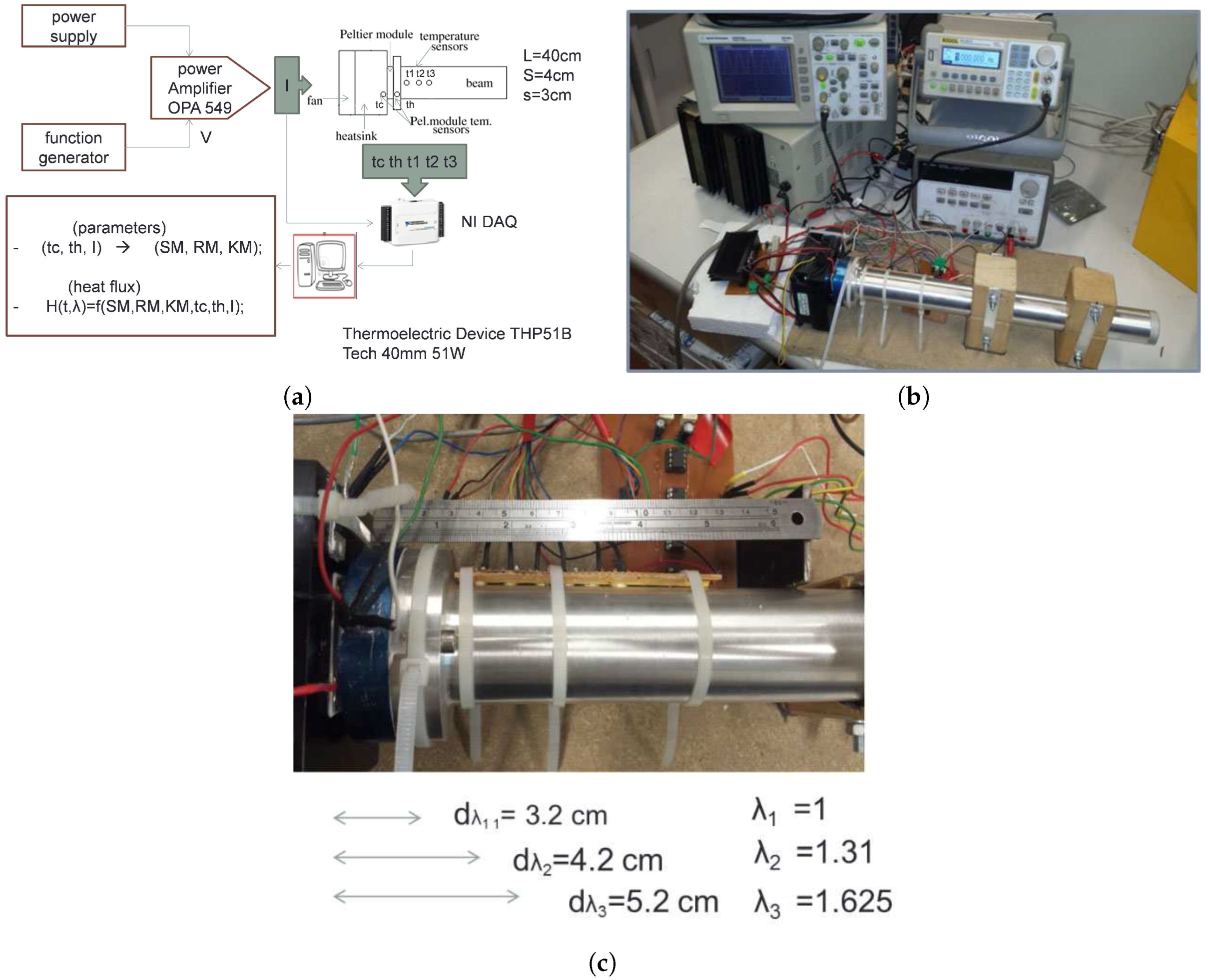
3.1. Experimental Setup
3.2. Experimental Model
3.3. Experimental Campaign
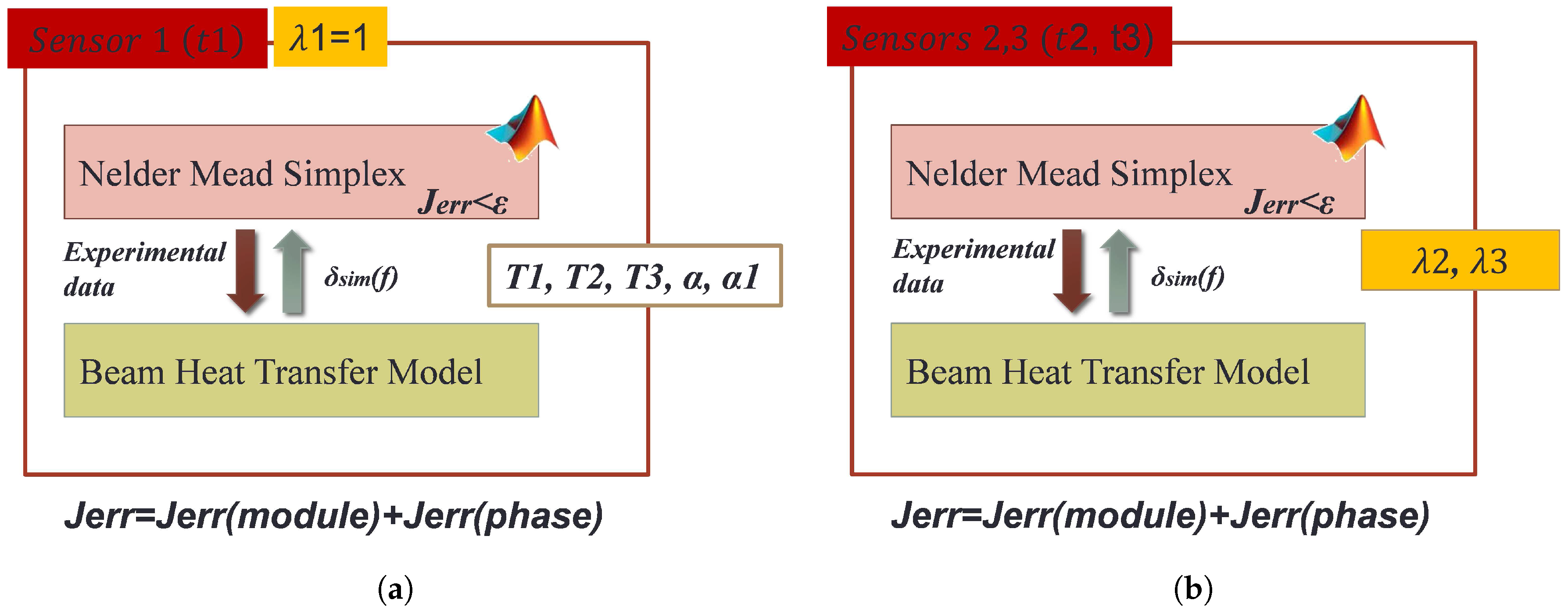
3.4. Identification and Validation Method
4. Modelling Results
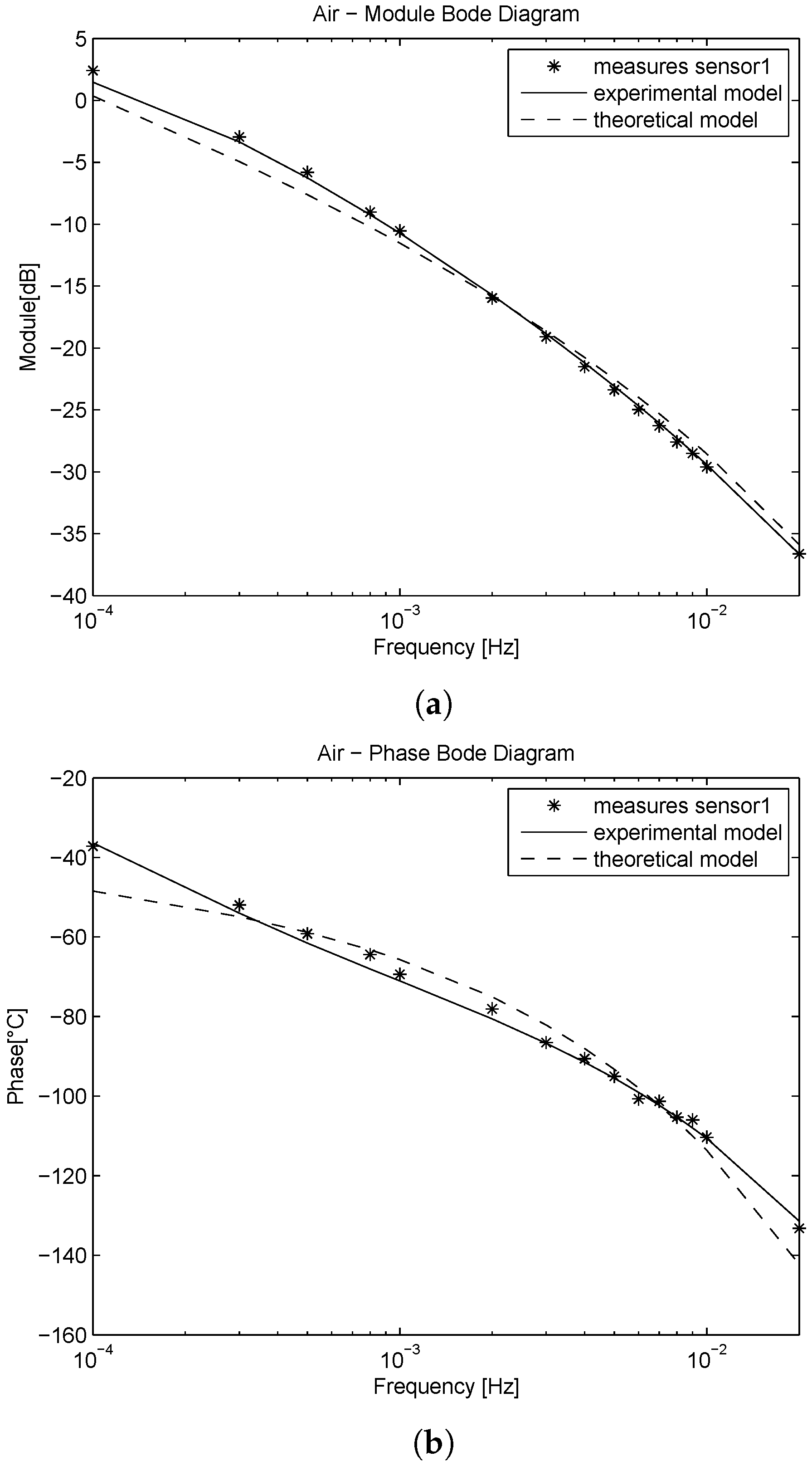
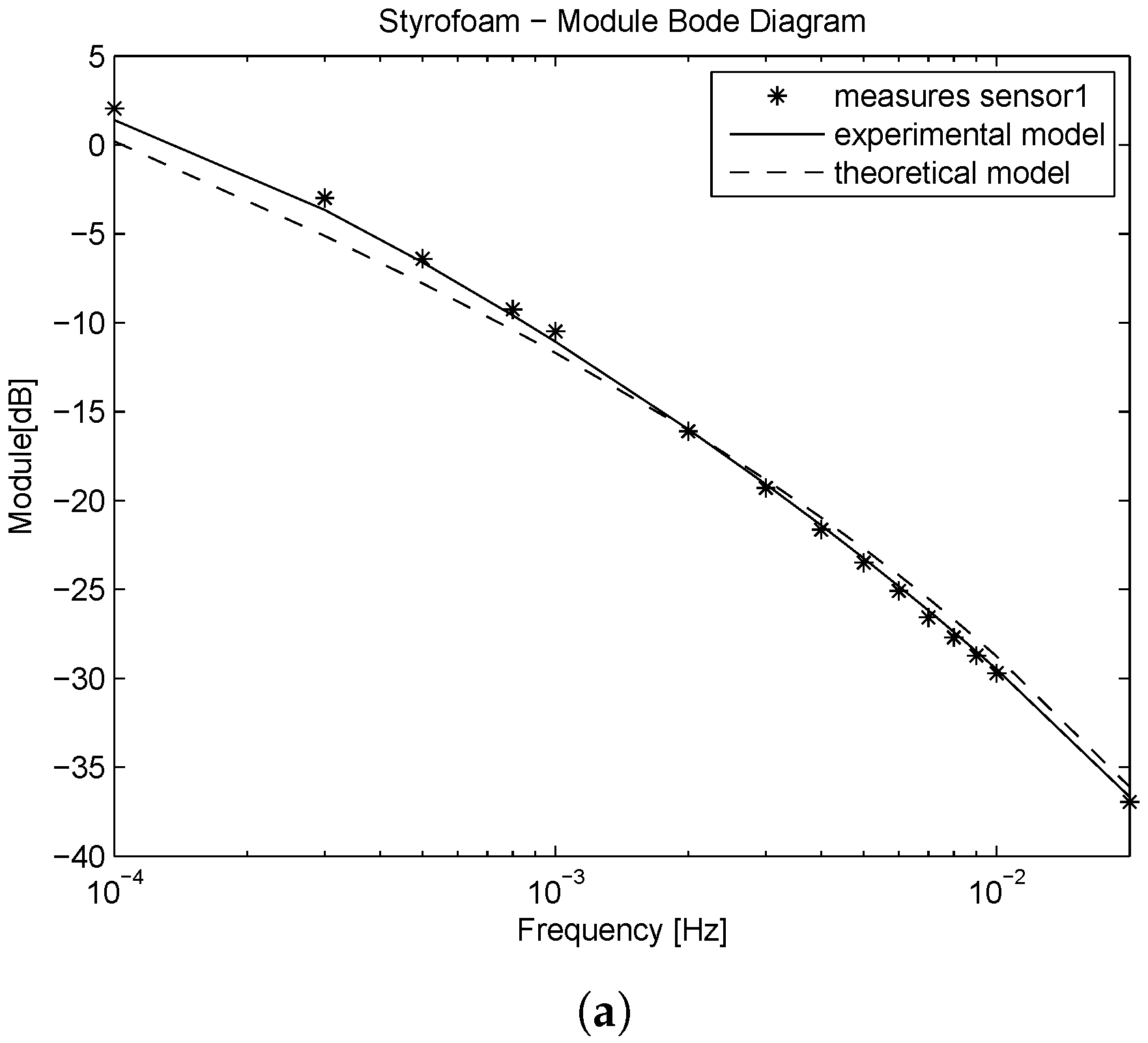
4.1. Model Identification at sensor1
4.2. Time Domain Model Validation at sensor1
4.3. Model Validation at sensor2 and sensor3
4.4. Fractional Order and Non-Continuous Materials
4.5. Controllers Implementation and Comparison
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Oldham, K.B.; Spanier, J. The Fractional Calculus: Theory and Applications of Differentiation and Integration to Arbitrary Order; Dover Books: New York, NY, USA, 2006. [Google Scholar]
- Caponetto, R.; Dongola, G.; Fortuna, L.; Petras, I. Fractional Order Systems: Modelling and Control Applications, in Nonlinear Science; Series A; World Scientific: Singapore, 2010; Volume 2. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: London, UK, 2010. [Google Scholar]
- Caponetto, R.; Graziani, S.; Pappalardo, L.; Sapuppo, F. Experimental Characterization of Ionic Polymer Metal Composite as a Novel Fractional Order Element. Adv. Math. Phys. 2013, 2013, 953695. [Google Scholar] [CrossRef]
- Elshurafa, A.; Mahmoud, N.; Almadhoun, K.; Salama, N.; Alshareef, H. Microscale electrostatic fractional capacitors using reduced graphene oxide percolated polymer composites. Appl. Phys. Lett. 2013, 102, 232901. [Google Scholar]
- Srivastava, I.; Sadasivam, S.; Smith, K.; Fisher, T. Combined Microstructure and Heat Conduction Modeling of Heterogeneous Interfaces and Material. J. Heat Transf. 2013, 135, 061603. [Google Scholar] [CrossRef]
- Kulish, V.; Lage, J. Fractional-Diffusion Solutions for Transient Local Temperature and Heat Flux. Trans. ASME 2000, 122, 372–376. [Google Scholar] [CrossRef]
- Sierociuk, D.; Dzieliski, A.; Sarwas, G.; Petras, I.; Podlubny, I.; Skovranek, T. Modelling heat transfer in heterogeneous media using fractional calculus. Philos. Trans. R. Soc. A 2013, 371, 20120146. [Google Scholar] [CrossRef] [PubMed]
- Gabano, J.; Poinot, T. Fractional modelling applied to heat conductivity and diffusivity estimation. Phys. Scr. 2000, 136, 014015. [Google Scholar] [CrossRef]
- Dzielinski, A.; Sierociuk, D. Fractional order model of beam heating process and its experimental verification. In New Trends in Nanotechnology and Fractional Calculus Applications; Baleanu, D., Guvenc, Z.B., Machado, J.A.T., Eds.; Springer: Berlin, Germany, 2010; pp. 287–294. [Google Scholar]
- Petras, I.; Vinagre, B.; Dorcak, L.; Feliu, V. Fractional digital control of a heat solid: Experimental results. In Proceedings of the 3rd International Carpathian Control Conference ICCC’02, Malenovice, Czech Republic, 27–30 May 2002; pp. 365–370.
- Macias, M.; Sierociuk, D. Fractional order calculus for modelling and fractional PID control of the heating process. In Proceedings of the 13th IEEE International Carpathian Control Conference (ICCC), Podbanske, Slovak Republic, 28–31 May 2012; pp. 452–457.
- Zecova, M.; Terpak, J. Heat conduction modeling by using fractional-order derivatives. Appl. Math. Comput. 2015, 257, 365–373. [Google Scholar]
- Kumar, P.; Agrawal, O. An approximate method for numerical solution of fractional differential equations. Signal Process. 2006, 86, 2602–2610. [Google Scholar] [CrossRef]
- Mainardi, F.; Luchko, Y.; Pagnini, G. The fundamental solution of the spacetime fractional diffusion equation. Fract. Calc. Appl. Anal. 2001, 4, 153–192. [Google Scholar]
- Podlubny, I.; Skovranek, T.; Vinagre, B.; Petras, I.; Verbitsky, B.; Chen, Y. Matrix approach to discrete fractional calculus III: Non-equidistant grids, variable step length and distributed orders. Philos. Trans. R. Soc. A 2013, 371, 20120153. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, P.; Liu, F. Implicit difference approximation for the time fractional diffusion equation. J. Appl. Math. Comput. 2006, 22, 87–99. [Google Scholar] [CrossRef]
- Gorenflo, P.; Mainardi, F.; Moretti, D.; Paradisi, P. Time fractional diffusion: A discrete random walk approach. Nonlinear Dyn. 2002, 29, 129–143. [Google Scholar] [CrossRef]
- Nelder, J.; Mead, R. A simplex method for function minimization. Comput. J. 1965, 4, 308–313. [Google Scholar] [CrossRef]
- Lagarias, J.; Reeds, J.; Wright, J.; Wright, P. Convergence Properties of the Nelder-Mead Simplex Method in Low Dimension. Siam J. Optim. 2010, 9, 112–147. [Google Scholar] [CrossRef]
- Astrom, K.; Hagglund, T. PID Controllers: Theory, Design, and Tuning, 2nd ed.; The Instrumentation, Systems, and Automation Society: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Bhaskaran, T.; Chen, Y.Q. Practical tuning of fractional order proportional and integral contrller: Tuning rules deveopment. In Proceedings of the ASME IDETC/CIE 2007, Las Vegas, NV, USA, 4–7 September 2007.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | T1 | T2 | T3 | α | |
|---|---|---|---|---|---|
| Air | 13.8610 | 289.7543 | 1222344.6 | ||
| Styrofoam | 13.7534 | 293.0218 | 1248787.9 | ||
| Metal Buckshots | 8.1853 | 282.1817 | 481148.7 |
| Material | T1 | T2 | T3 | α | |
|---|---|---|---|---|---|
| Air | 2.0589 | 117.6201 | 9260.2 | 0.7408 | 0.7077 |
| Styrofoam | 2.1589 | 109.8189 | 11252.4 | 0.7382 | 0.7649 |
| Metal Buckshots | 2.5013 | 456.3768 | 13193.5 | 0.5771 | 0.6869 |
| Material | Model | |||||||
|---|---|---|---|---|---|---|---|---|
| Air | Theo. | 10.5569 | 1 | 3.2 | 1.1542 | 3.69 | 1.3496 | 4.32 |
| Exp. | 3.5595 | 1 | 3.2 | 1.2031 | 3.85 | 1.50 | 4.8 | |
| Styrofoam | Theo. | 9.073 | 1 | 3.2 | 1.1622 | 3.72 | 1.3607 | 4.35 |
| Exp. | 3.087 | 1 | 3.2 | 1.2104 | 3.87 | 1.51 | 4.83 | |
| Metal Buckshots | Theo. | 6.9831 | 1 | 3.2 | 1.2001 | 3.84 | 1.4096 | 4.51 |
| Exp. | 2.3032 | 1 | 3.2 | 1.2929 | 4.14 | 1.6062 | 5.14 |
| Material | Thermal Conductivity | α |
|---|---|---|
| Air | 0.025 | 0.7408 |
| Styrofoam | 0.04 | 0.7382 |
| Metal Buckshots | 35 | 0.5771 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caponetto, R.; Sapuppo, F.; Tomasello, V.; Maione, G.; Lino, P. Fractional-Order Identification and Control of Heating Processes with Non-Continuous Materials. Entropy 2016, 18, 398. https://doi.org/10.3390/e18110398
Caponetto R, Sapuppo F, Tomasello V, Maione G, Lino P. Fractional-Order Identification and Control of Heating Processes with Non-Continuous Materials. Entropy. 2016; 18(11):398. https://doi.org/10.3390/e18110398
Chicago/Turabian StyleCaponetto, Riccardo, Francesca Sapuppo, Vincenzo Tomasello, Guido Maione, and Paolo Lino. 2016. "Fractional-Order Identification and Control of Heating Processes with Non-Continuous Materials" Entropy 18, no. 11: 398. https://doi.org/10.3390/e18110398
APA StyleCaponetto, R., Sapuppo, F., Tomasello, V., Maione, G., & Lino, P. (2016). Fractional-Order Identification and Control of Heating Processes with Non-Continuous Materials. Entropy, 18(11), 398. https://doi.org/10.3390/e18110398