
A Complexity-Based Approach for the Detection of Weak Signals in Ocean Ambient Noise

 , ,
, ,
Abstract
:1. Introduction
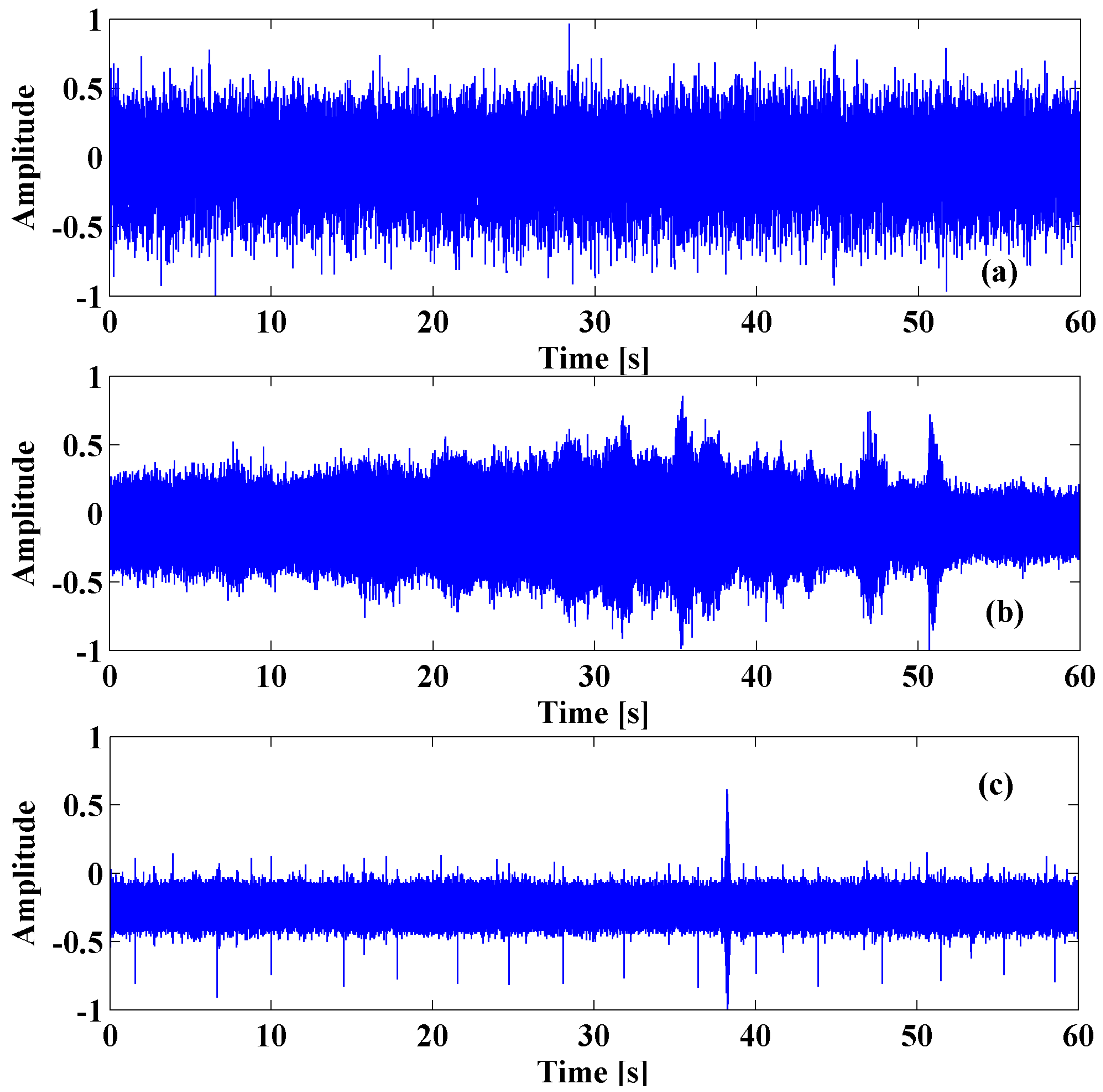
2. Data Measurement
3. Complexity Methods
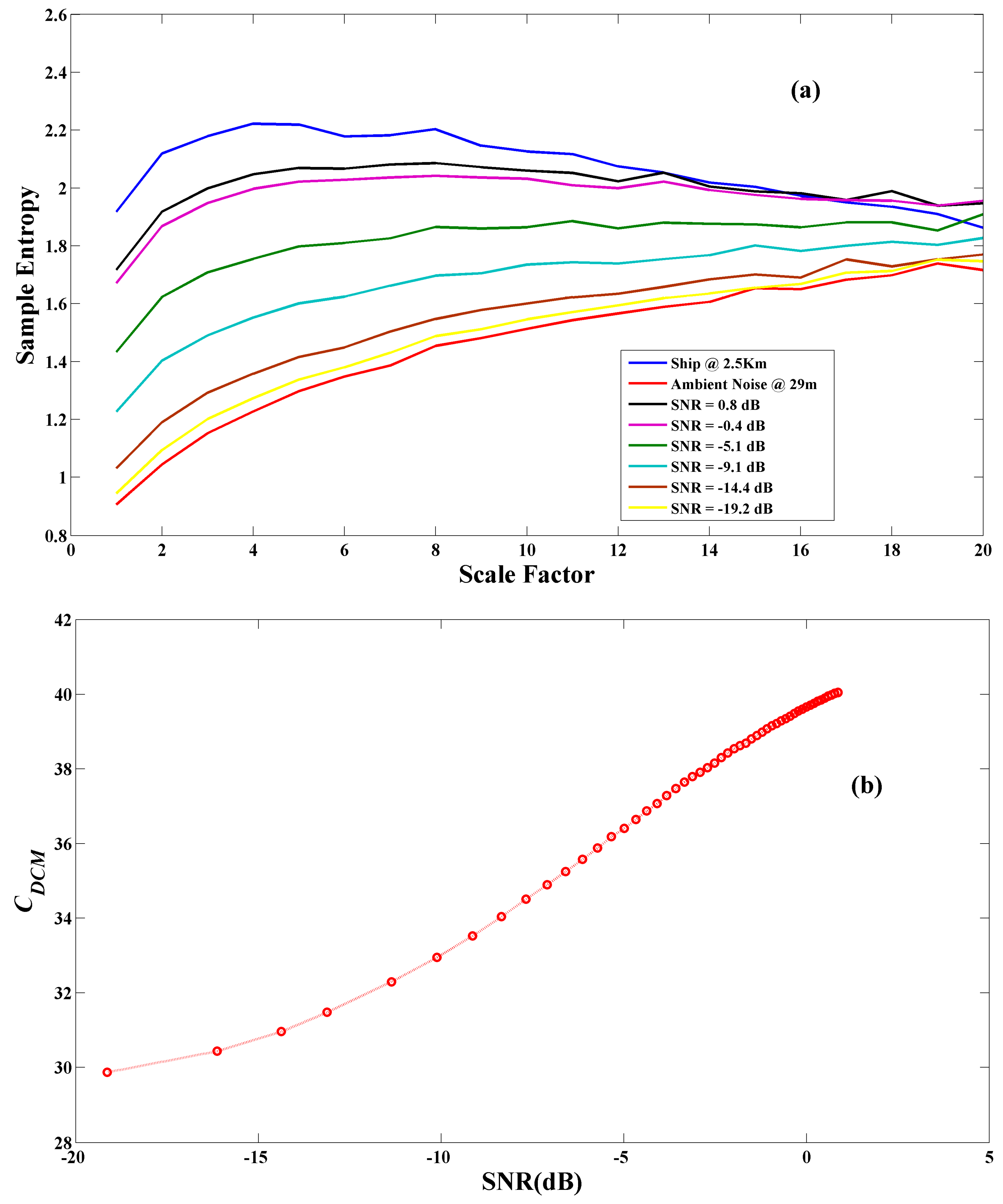
3.1. Multiscale Entropy-Based Dynamical Complexity Measure
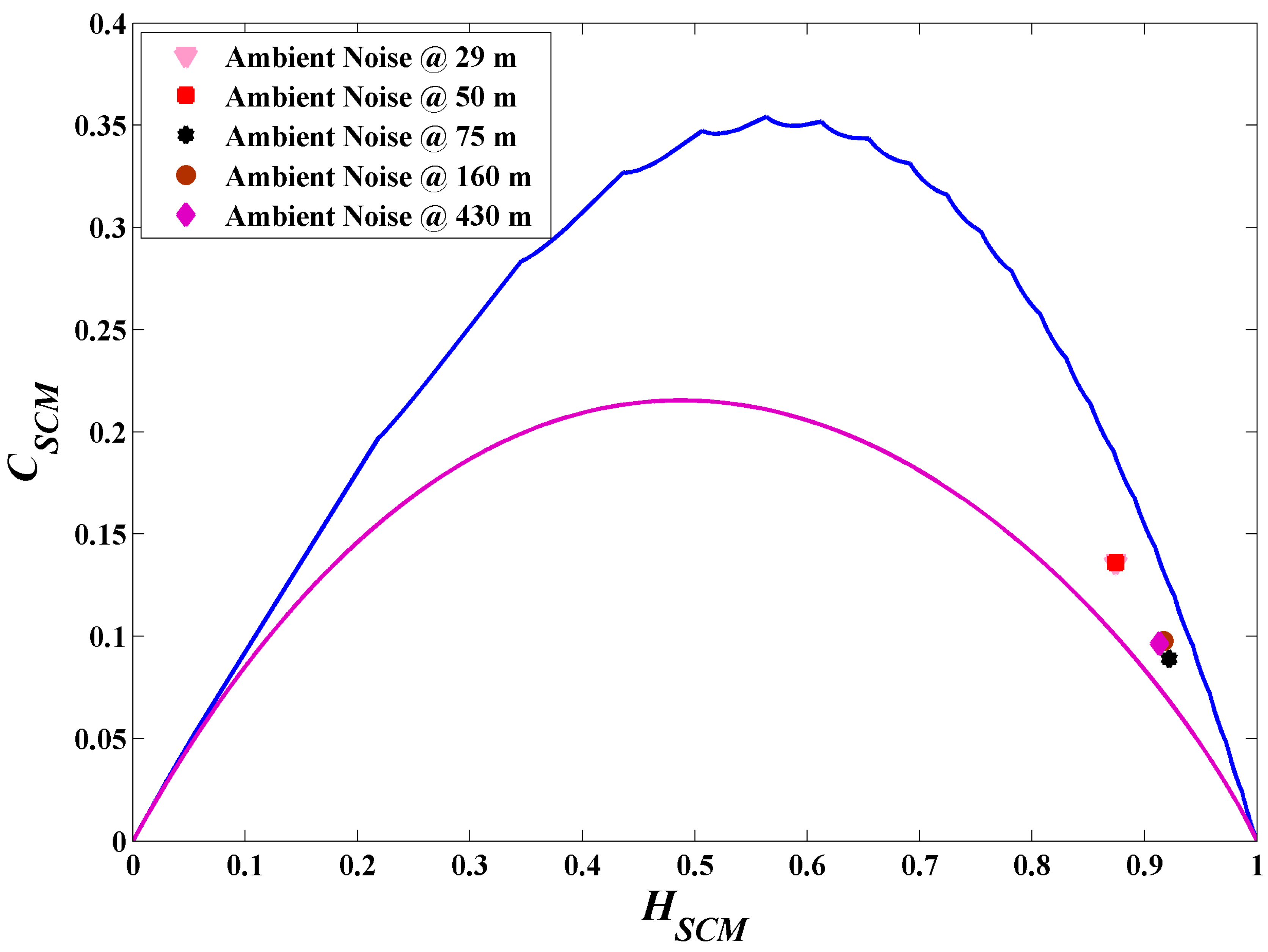
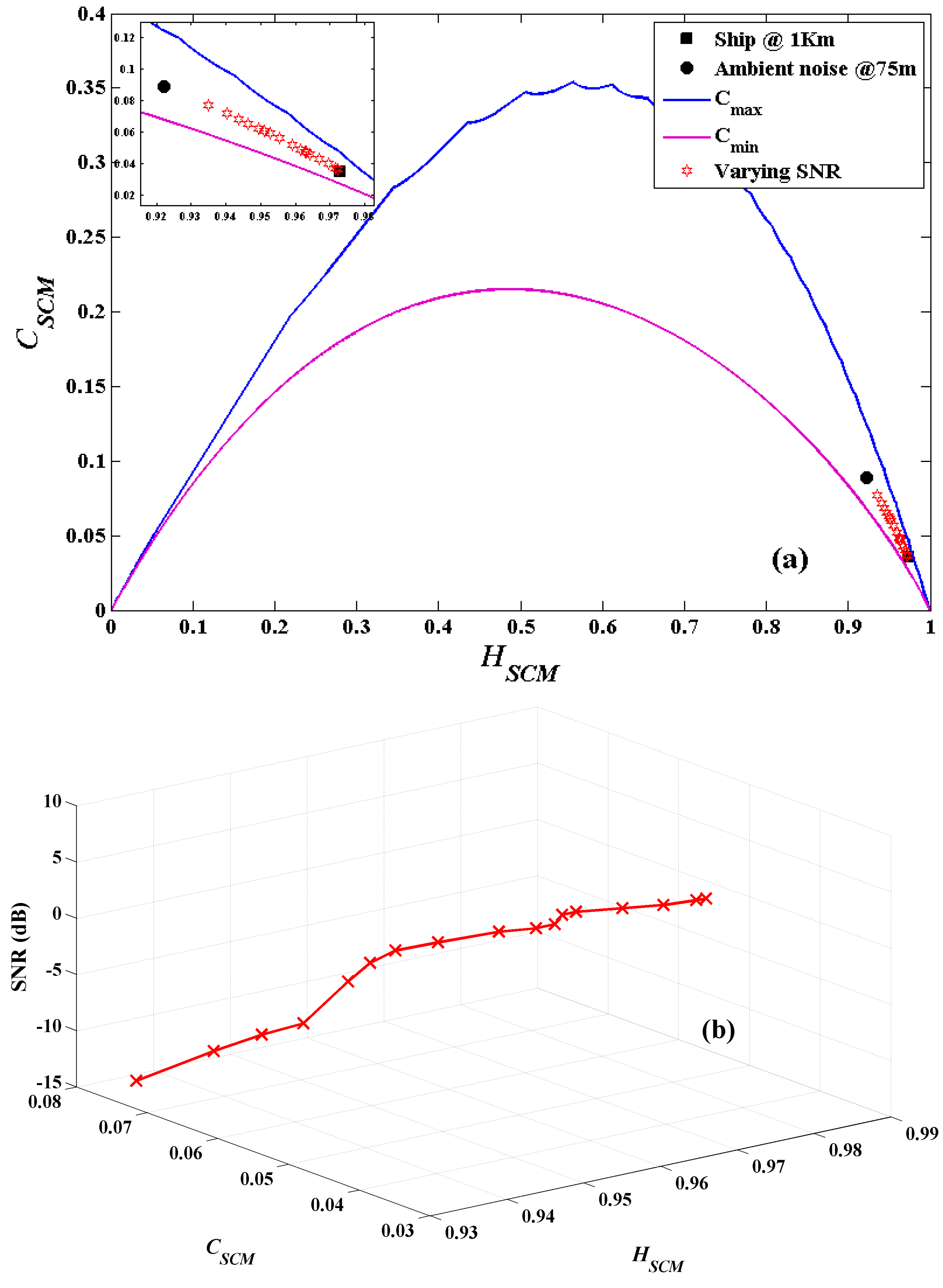
3.2. Statistical Complexity Measure (SCM)
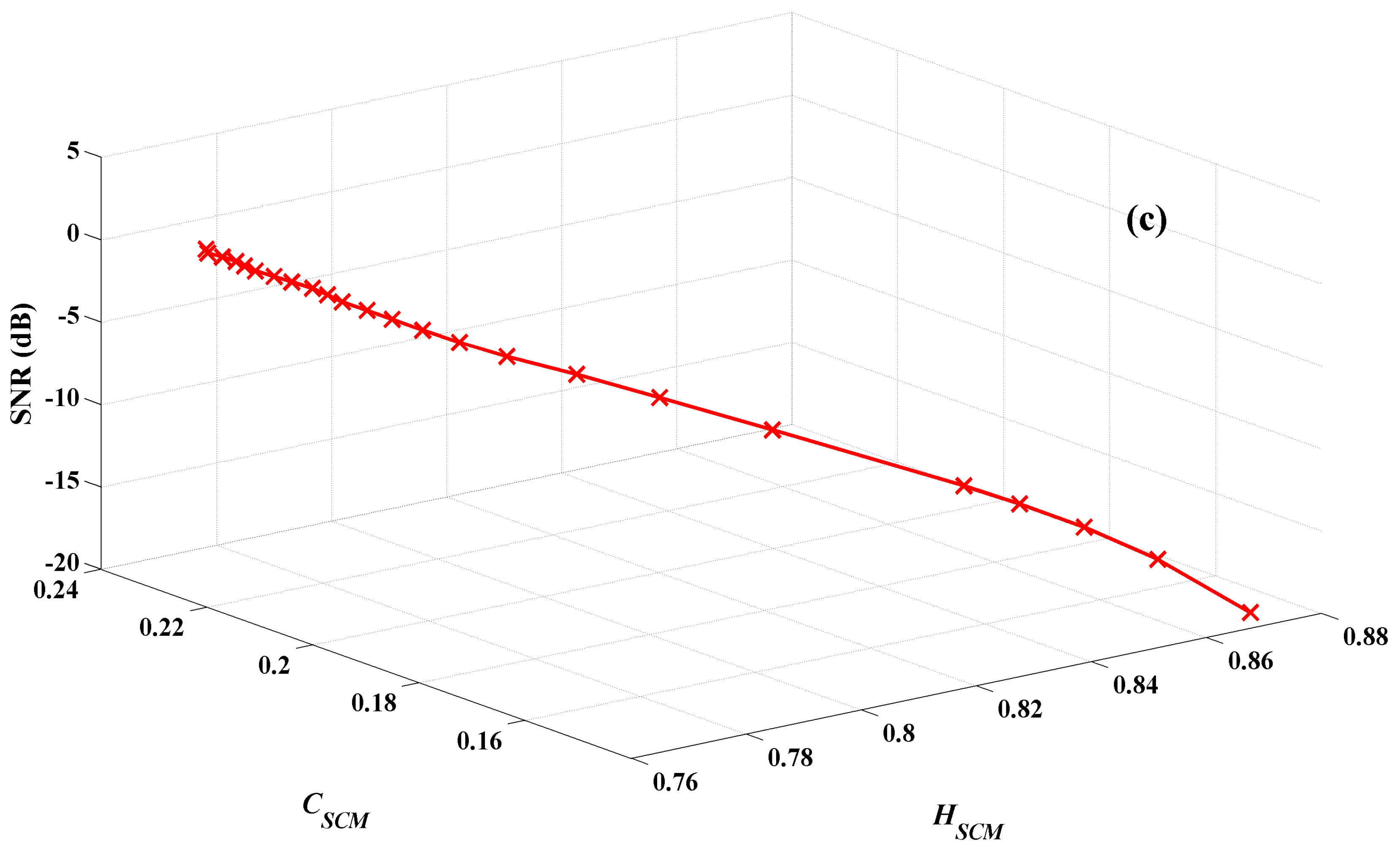
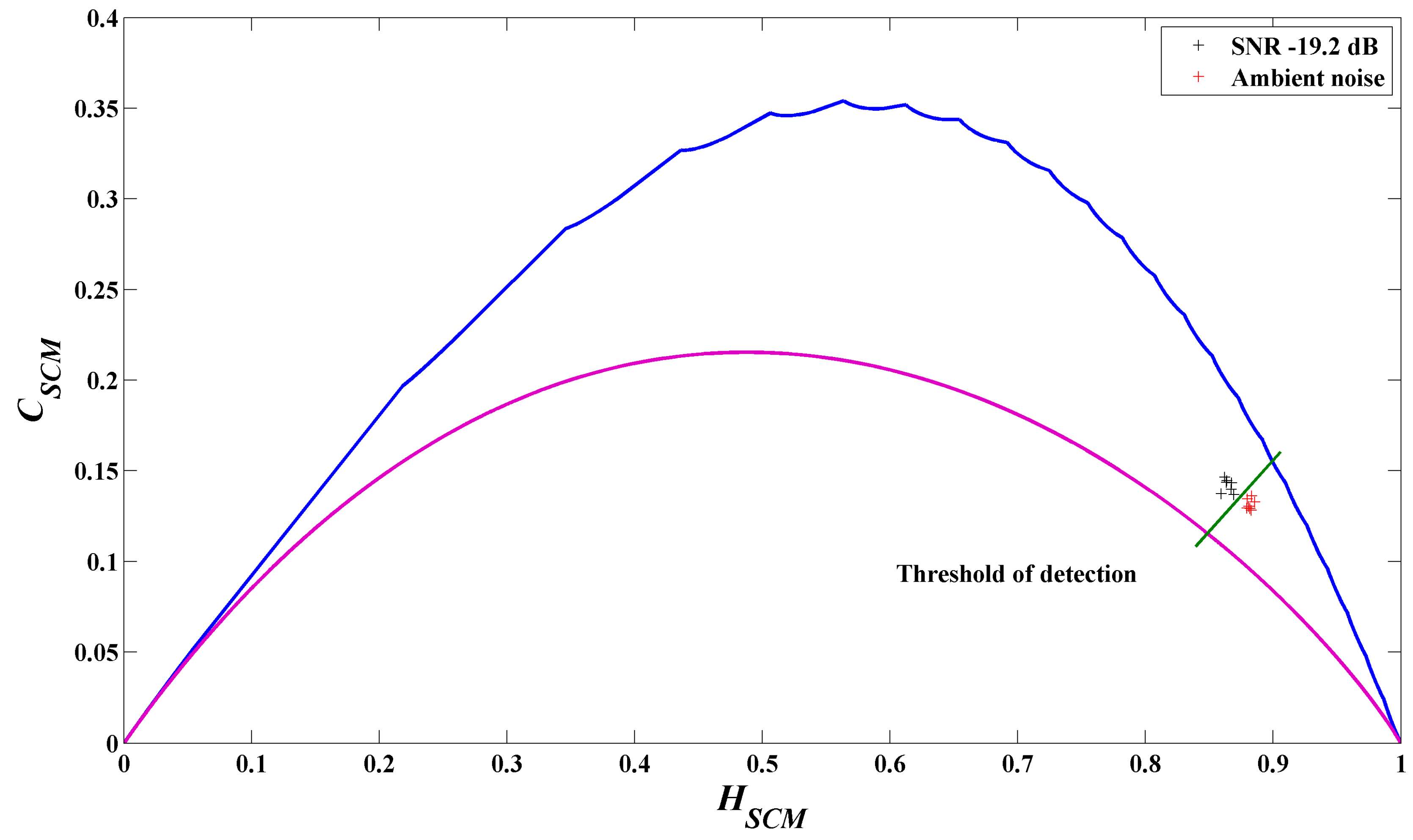
4. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cato, D.H. A Perspective on 30 Years of Progress in Ambient Noise: Source Mechanisms and the Characteristics of the Sound Field. In Proceedings of the 3rd International Conference on Ocean Acoustics (OA2012), Beijing, China, 21–25 May 2012.
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; McGraw-Hill: New York, NY, USA, 1983. [Google Scholar]
- Wagstaff, R.A. An ambient noise model for the northeast Pacific Ocean basin. IEEE J. Ocean. Eng. 2005, 30, 286–294. [Google Scholar] [CrossRef]
- Siddagangaiah, S.; Li, Y.; Guo, X.; Yang, K. On the Dynamics of Ocean Ambient Noise: Two Decades Later. Chaos 2015, 25. [Google Scholar] [CrossRef] [PubMed]
- Clark, C.W.; Ellison, W.T.; Southall, B.L.; Hatch, L.; van Parijs, S.; Frankel, A.; Ponirakis, D. Acoustic masking in marine ecosystems: Intuitions, analysis, and implication. Mar. Ecol. Prog. Ser. 2009, 395, 201–222. [Google Scholar] [CrossRef]
- Donald, R. Mechanics of Underwater Noise; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Hildebrand, J.A. Anthropogenic and natural sources of ambient noise in the ocean. Mar. Ecol. Prog. Ser. 2009, 395, 5–20. [Google Scholar] [CrossRef]
- Mellinger, D.K.; Nieukirk, S.L.; Matsumoto, H.; Heimlich, S.L.; Dziak, R.P.; Haxel, J.; Fowler, M.; Meinig, C.; Miller, H.V. Seasonal occurrence of North Atlantic Right Whale (Eubalaena glacialis) vocalizations at two sites on the Scotian Shelf. Mar. Mamm. Sci. 2007, 23, 856–867. [Google Scholar] [CrossRef]
- Urazghildiiev, I.R.; Clark, C.W. Acoustic detection of North Atlantic Right Whale contact calls using spectrogram-based statistics. J. Acoust. Soc. Am. 2007, 122, 769–776. [Google Scholar] [CrossRef] [PubMed]
- Kozaczka, E.; Grelowska, G. Shipping noise. Arch. Acoust. 2004, 29, 169–176. [Google Scholar]
- Lampert, T.A.; O’Keefe, S.E.M. On the detection of tracks in spectrogram images. Pattern Recognit. 2013, 46, 1396–1408. [Google Scholar] [CrossRef]
- Pan, J.; Jin, H.; Yang, S.-E. A neural network based method for detection of weak underwater signals. J. Mar. Sci. Appl. 2010, 9, 256–261. [Google Scholar] [CrossRef]
- Zheng, S.Y.; Guo, H.; Li, Y.; Wang, B.; Zhang, P. A new method for detecting line spectrum of ship-radiated noise using Duffing oscillator. Chin. Sci. Bull. 2007, 52, 1906–1912. [Google Scholar] [CrossRef]
- Zhang, R.; Chu, F.; Ran, L.; Guo, J. Weak Signal Detection Method under the Strong Noise Background. In Proceedings of the 2011 International Conference on Informatics, Cybernetics, and Computer Engineering (ICCE2011), Melbourne, Australia, 19–20 November 2011; Springer-Verlag: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Nicolaou, N.; Georgiou, J. The use of permutation entropy to characterize sleep electroencephalograms. Clin. EEG Neurosci. 2011, 42, 24–28. [Google Scholar] [CrossRef] [PubMed]
- Costa, M.D.; Henriques, T.; Munshi, M.N.; Segal, A.R.; Goldberger, A.L. Dynamical glucometry: Use of multiscale entropy analysis in diabetes. Chaos 2014, 24. [Google Scholar] [CrossRef] [PubMed]
- Zunino, L.; Tabak, B.M.; Serinaldi, F.; Zanin, M.; Pérez, D.G.; Rosso, O.A. Commodity predictability analysis with a permutation information theory approach. Phys. A Stat. Mech. Appl. 2011, 390, 876–890. [Google Scholar] [CrossRef]
- Xia, J.; Shang, P.; Wang, J.; Shi, W. Classifying of financial time series based on multiscale entropy and multiscale time irreversibility. Phys. A Stat. Mech. Appl. 2014, 400, 151–158. [Google Scholar] [CrossRef]
- Barreiro, M.; Marti, A.C.; Masoller, C. Inferring long memory processes in the climate network via ordinal pattern analysis. Chaos 2011, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Balzter, H.; Tate, N.J.; Kaduk, J.; Harper, D.; Page, S.; Morrison, R.; Muskulus, M.; Jones, P. Multi-Scale Entropy Analysis as a Method for Time-Series Analysis of Climate Data. Climate 2015, 3, 227–240. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, H.V.; Zunino, L.; Mendes, R.S.; Lenzi, E.K. Complexity-entropy causality plane: A useful approach for distinguishing songs. Phys. A Stat. Mech. Appl. 2012, 391, 2421–2428. [Google Scholar] [CrossRef]
- Mendes, R.S.; Ribeiro, H.V.; Freire, F.C.M.; Tateishi, A.A.; Lenzi, E.K. Universal patterns in sound amplitudes of songs and music genres. Phys. Rev. E 2011, 83. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro, H.V.; de Souza, R.T.; Lenzi, E.K.; Mendes, R.S.; Evangelista, L.R. The soundscape dynamics of human agglomeration. New J. Phys. 2011, 13. [Google Scholar] [CrossRef]
- Costa, M.; Goldberger, A.; Peng, C.-K. Multiscale entropy analysis of biological signals. Phys. Rev. E 2005, 71. [Google Scholar] [CrossRef] [PubMed]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. 2000, 278, H2039–H2049. [Google Scholar]
- Lamberti, P.W.; Martin, M.T.; Plastino, A.; Rosso, O.A. Intensive entropic non-triviality measure. Phys. A Stat. Mech. Appl. 2004, 334, 119–131. [Google Scholar] [CrossRef]
- Martin, M.T.; Plastino, A.; Rosso, O.A. Statistical complexity and disequilibrium. Phys. Lett. A 2003, 311, 126–132. [Google Scholar] [CrossRef]
- Lopez-Ruiz, R.; Mancini, H.L.; Calbet, X. A statistical measure of complexity. Phys. Lett. A 1995, 209, 321–326. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. ACM SIGMOB. Mob.Comput. Commun. Rev. 2001, 5, 3–55. [Google Scholar] [CrossRef]
- Christoph, B.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88. [Google Scholar] [CrossRef]
- Amigó, J. Permutation Complexity in Dynamical Systems: Ordinal Patterns, Permutation Entropy and All That; Springer Science & Business Media: New York, NY, USA, 2010. [Google Scholar]
- Zanin, M.; Zunino, L.; Rosso, O.A.; Papo, D. Permutation entropy and its main biomedical and econophysics applications: A review. Entropy 2012, 14, 1553–1577. [Google Scholar] [CrossRef]
- Zunino, L.; Soriano, M.C.; Fischer, I.; Rosso, O.A.; Mirasso, C.R. Permutation-information-theory approach to unveil delay dynamics from time-series analysis. Phys. Rev. E 2010, 82. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soriano, M.C.; Zunino, L.; Rosso, O.A.; Fischer, I. Time scales of a chaotic semiconductor laser with optical feedback under the lens of a permutation information analysis. IEEE J. Quantum Electron. 2011, 47, 252–261. [Google Scholar] [CrossRef] [Green Version]
- Martin, M.T.; Plastino, A.; Rosso, O.A. Generalized statistical complexity measures: Geometrical and analytical properties. Phys. A Stat. Mech. Appl. 2006, 369, 439–462. [Google Scholar] [CrossRef]
- Lampert, T.A.; O’Keefe Simon, E.M. A survey of spectrogram track detection algorithms. Appl. Acoust. 2010, 71, 87–100. [Google Scholar] [CrossRef]
- Rosso, O.A.; Larrondo, H.A.; Martin, M.T.; Plastino, A.; Fuentes, M.A. Distinguishing noise from chaos. Phys. Rev. Lett. 2007, 99. [Google Scholar] [CrossRef] [PubMed]
- He, M.; Xu, W.; Sun, Z. Dynamical complexity and stochastic resonance in a bistable system with time delay. Nonlinear Dyn. 2015, 79, 1787–1795. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
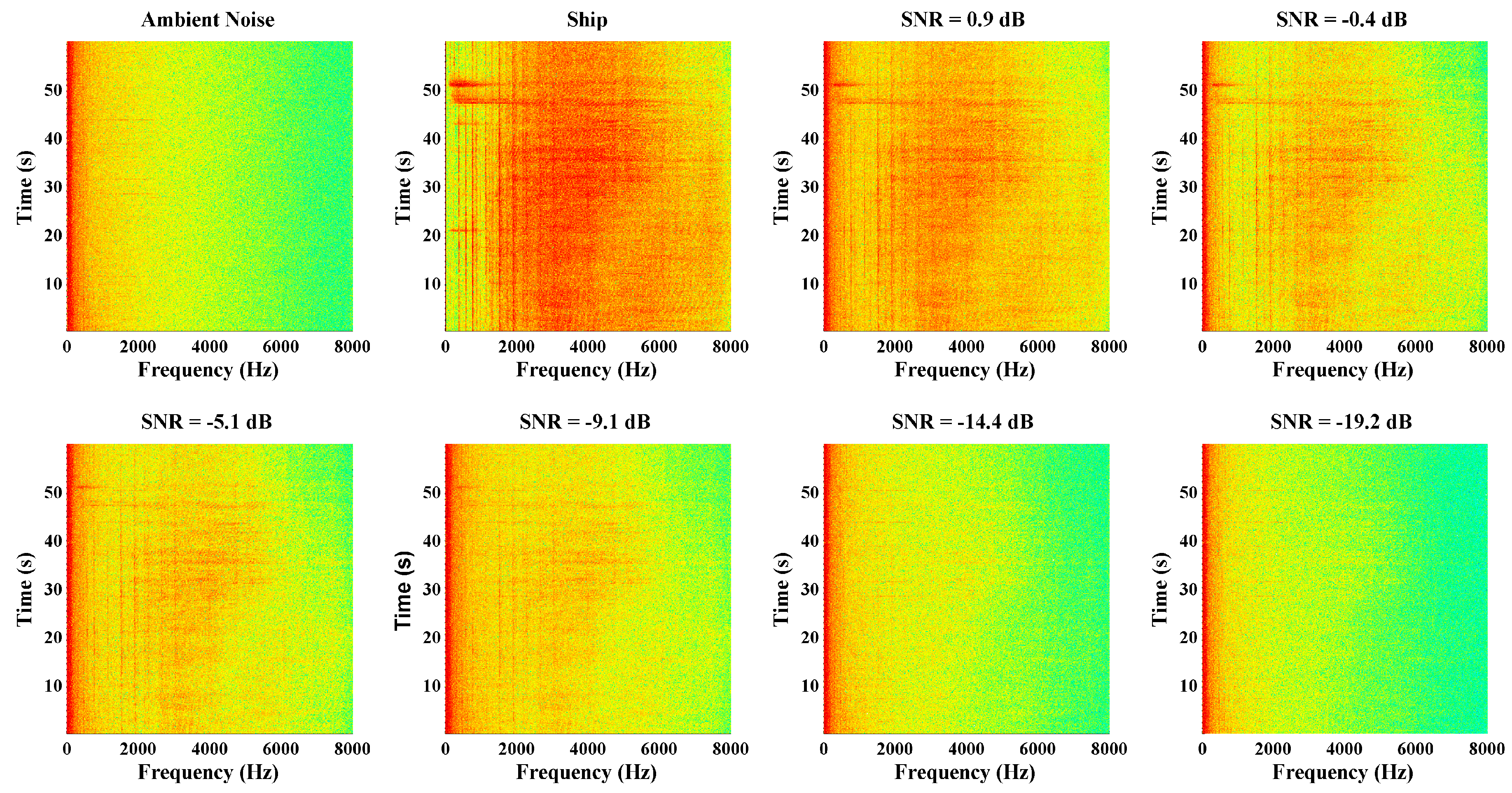
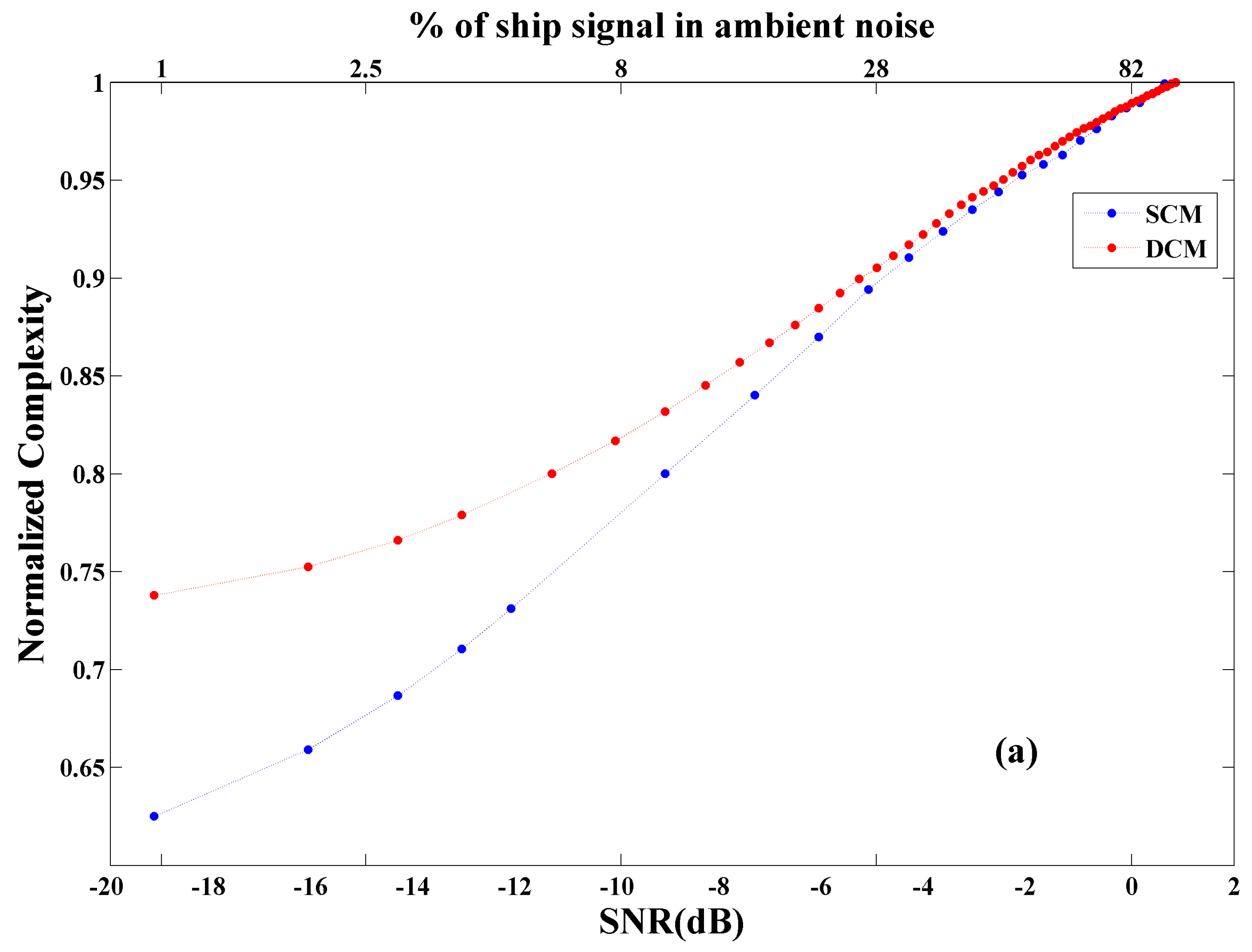
| Percentage of Ship Signal in Ambient Noise | SNR (dB) |
|---|---|
| 100 | 0.9 |
| 90 | −0.4 |
| 25 | −5.1 |
| 10 | −9.1 |
| 3 | −14.4 |
| 1 | −19.2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddagangaiah, S.; Li, Y.; Guo, X.; Chen, X.; Zhang, Q.; Yang, K.; Yang, Y. A Complexity-Based Approach for the Detection of Weak Signals in Ocean Ambient Noise. Entropy 2016, 18, 101. https://doi.org/10.3390/e18030101
Siddagangaiah S, Li Y, Guo X, Chen X, Zhang Q, Yang K, Yang Y. A Complexity-Based Approach for the Detection of Weak Signals in Ocean Ambient Noise. Entropy. 2016; 18(3):101. https://doi.org/10.3390/e18030101
Chicago/Turabian StyleSiddagangaiah, Shashidhar, Yaan Li, Xijing Guo, Xiao Chen, Qunfei Zhang, Kunde Yang, and Yixin Yang. 2016. "A Complexity-Based Approach for the Detection of Weak Signals in Ocean Ambient Noise" Entropy 18, no. 3: 101. https://doi.org/10.3390/e18030101
APA StyleSiddagangaiah, S., Li, Y., Guo, X., Chen, X., Zhang, Q., Yang, K., & Yang, Y. (2016). A Complexity-Based Approach for the Detection of Weak Signals in Ocean Ambient Noise. Entropy, 18(3), 101. https://doi.org/10.3390/e18030101