
Fatiguing Effects on the Multi-Scale Entropy of Surface Electromyography in Children with Cerebral Palsy


Abstract
:1. Introduction
2. Method
2.1. Subjects
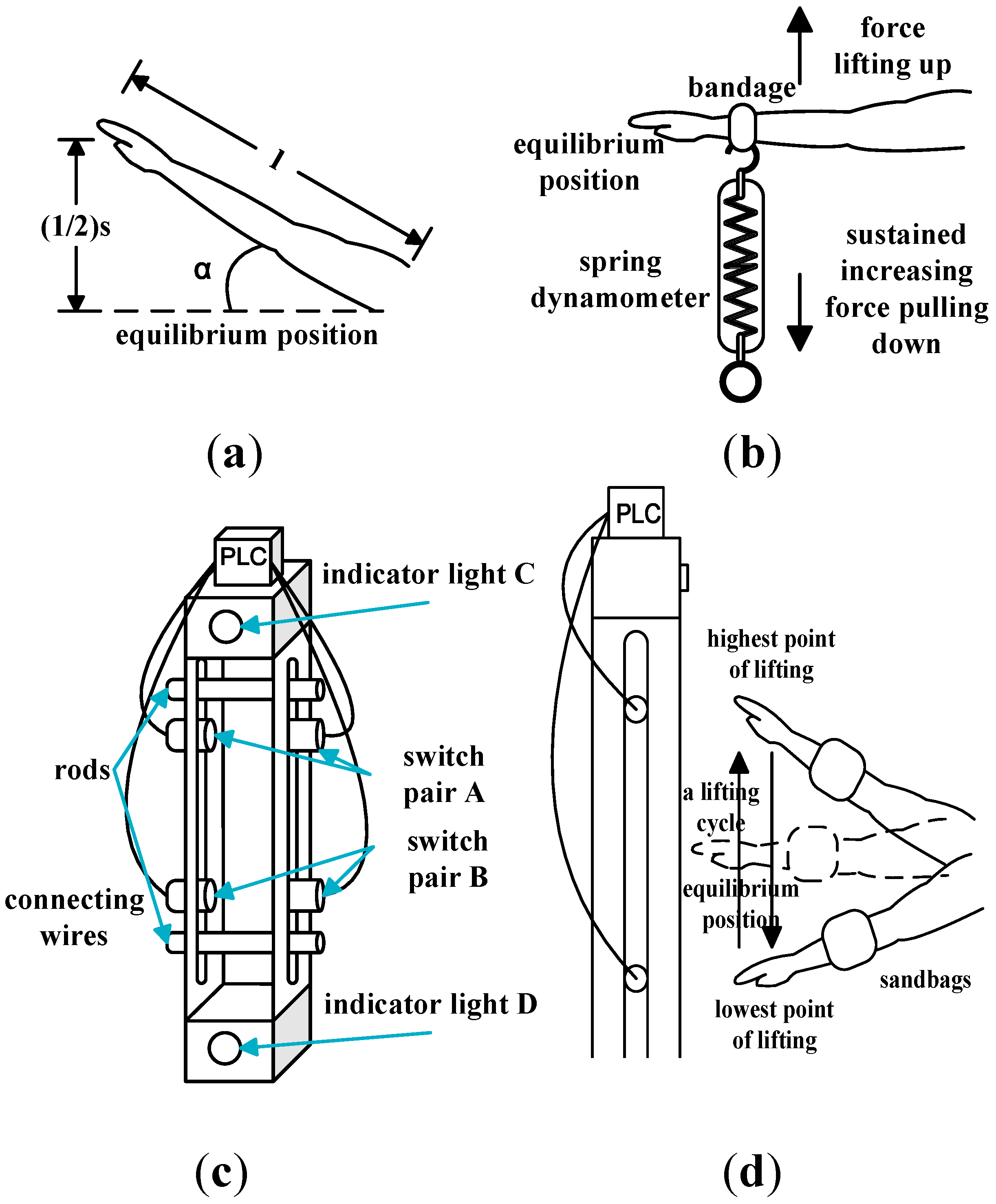
2.2. Experiment
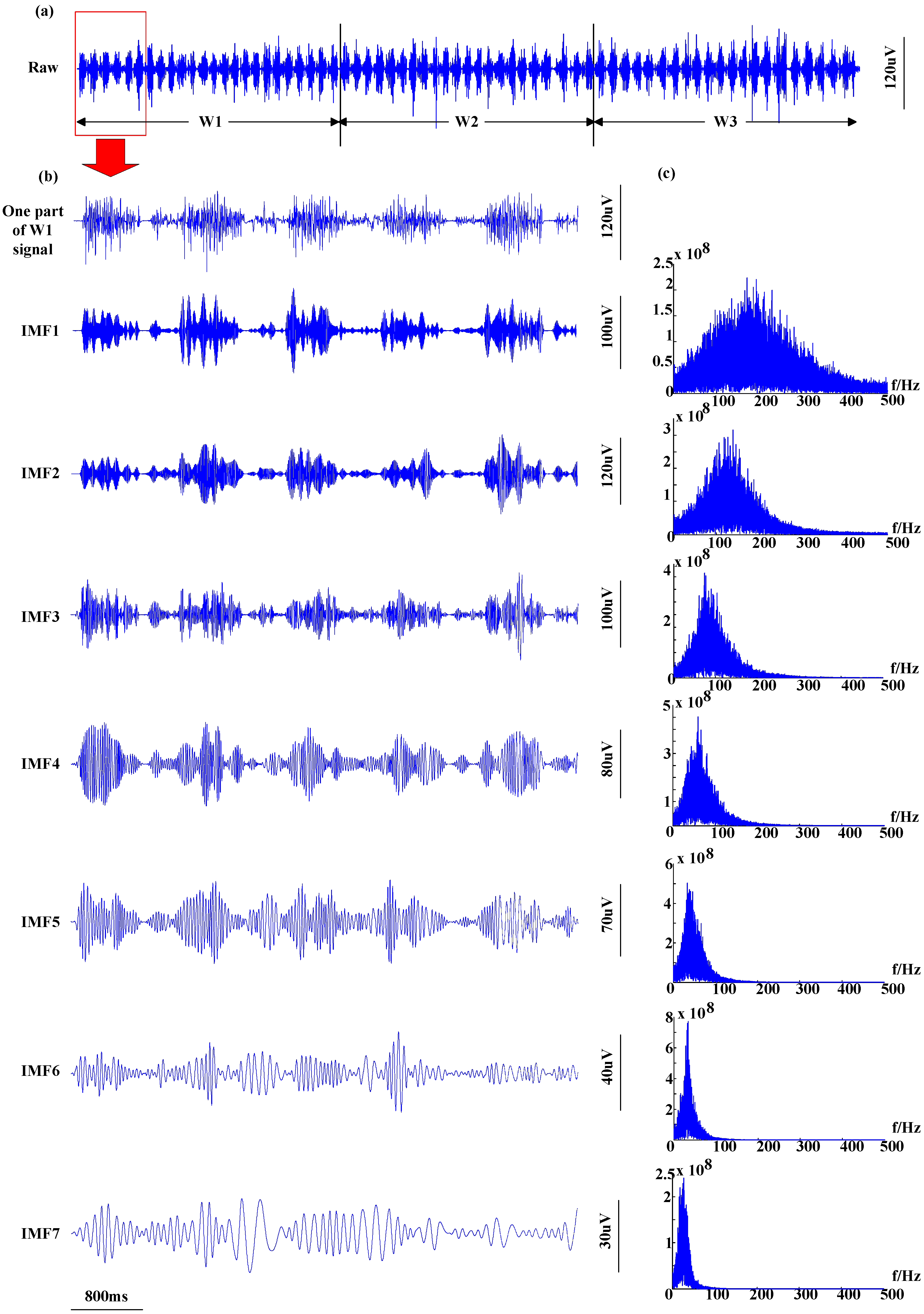
2.3. Data Segmentation
2.4. MSE Analysis
2.4.1. Empirical Mode Decomposition
2.4.2. Sample Entropy
2.4.3. EMD-Enhanced MSE Analysis
2.5. Statistical Analysis
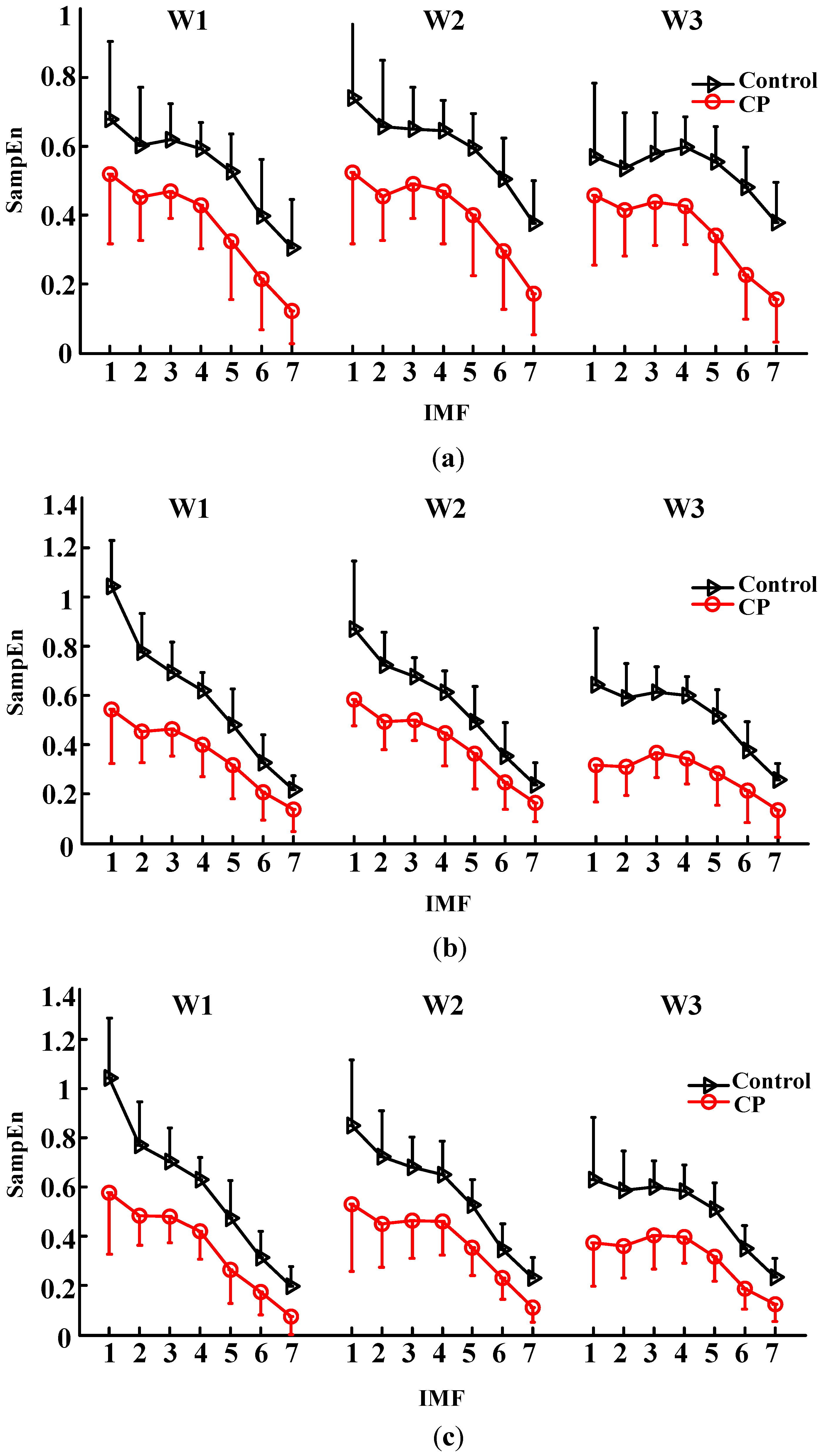
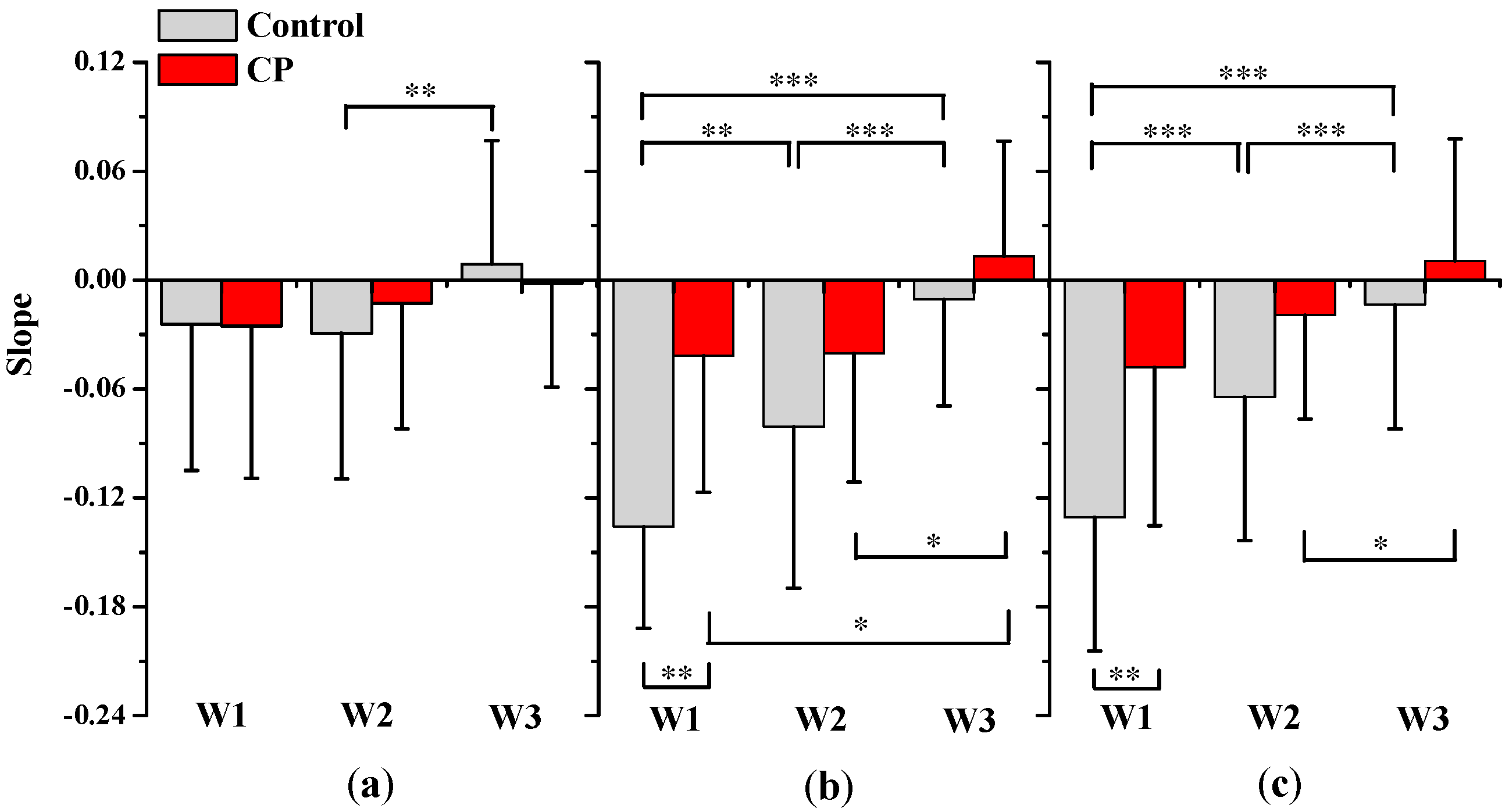
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bax, M.; Goldstein, M.; Rosenbaum, P.; Leviton, A.; Paneth, N.; Dan, B.; Jacobsson, B.; Damiano, D. Proposed definition and classification of cerebral palsy, April 2005. Dev. Med. Child Neurol. 2005, 47, 571–576. [Google Scholar] [CrossRef] [PubMed]
- Rosenbaum, P.; Paneth, N.; Leviton, A.; Goldstein, M.; Bax, M.; Damiano, D.; Dan, B.; Jacobsson, B. A report: The definition and classification of cerebral palsy April 2006. Dev. Med. Child Neurol. Suppl. 2007, 109, 8–14. [Google Scholar] [PubMed]
- Gormley, M.E., Jr. Treatment of neuromuscular and musculoskeletal problems in cerebral palsy. Dev. Neurorehabil. 2001, 4, 5–16. [Google Scholar]
- Morris, C. Definition and classification of cerebral palsy: A historical perspective. Dev. Med. Child Neurol. 2007, 49, 3–7. [Google Scholar] [CrossRef]
- Ketelaar, M.; Vermeer, A.; Helders, P.J. Functional motor abilities of children with cerebral palsy: A systematic literature review of assessment measures. Clin. Rehabil. 1998, 12, 369–380. [Google Scholar] [CrossRef] [PubMed]
- Scholtes, V.A.; Becher, J.G.; Beelen, A.; Lankhorst, G.J. Clinical assessment of spasticity in children with cerebral palsy: A critical review of available instruments. Dev. Med. Child Neurol. 2006, 48, 64–73. [Google Scholar] [CrossRef] [PubMed]
- Jahnsen, R.; Villien, L.; Stanghelle, J.K.; Holm, I. Fatigue in adults with cerebral palsy in Norway compared with the general population. Dev. Med. Child Neurol. 2003, 45, 296–303. [Google Scholar] [CrossRef] [PubMed]
- Gandevia, S. Spinal and supraspinal factors in human muscle fatigue. Physiol. Rev. 2001, 81, 1725–1789. [Google Scholar] [PubMed]
- De Luca, C.J. Myoelectrical manifestations of localized muscular fatigue in humans. Crit. Rev. Biomed. Eng. 1983, 11, 251–279. [Google Scholar]
- Crenshaw, A.; Karlsson, S.; Gerdle, B.; Friden, J. Differential responses in intramuscular pressure and EMG fatigue indicators during low-vs. high-level isometric contractions to fatigue. Acta Physiol. Scand. 1997, 160, 353–361. [Google Scholar] [CrossRef] [PubMed]
- Croce, R.; Miller, J. Angle-and velocity-specific alterations in torque and semg activity of the quadriceps and hamstrings during isokinetic extension-flexion movements. Electromyogr. Clin. Neurophysiol. 2005, 46, 83–100. [Google Scholar]
- Komi, P.V.; Tesch, P. EMG frequency spectrum, muscle structure, and fatigue during dynamic contractions in man. Eur. J. Appl. Physiol. Occup. Physiol. 1979, 42, 41–50. [Google Scholar] [CrossRef] [PubMed]
- Yamada, H.; Kaneko, K.; Masuda, T. Effects of voluntary activation on neuromuscular endurance analyzed by surface electromyography. Percept. Motor Skills 2002, 95, 613–619. [Google Scholar] [CrossRef] [PubMed]
- Lei, M.; Wang, Z.; Feng, Z. Detecting nonlinearity of action surface EMG signal. Phys. Lett. A 2001, 290, 297–303. [Google Scholar] [CrossRef]
- Rodrick, D.; Karwowski, W. Nonlinear dynamical behavior of surface electromyographical signals of biceps muscle under two simulated static work postures. Nonlinear Dyn. Psychol. Life Sci. 2006, 10, 21–35. [Google Scholar]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [PubMed]
- Abásolo, D.; Hornero, R.; Espino, P.; Poza, J.; Sánchez, C.I.; De La Rosa, R. Analysis of regularity in the EEG background activity of Alzheimer’s disease patients with Approximate Entropy. Clin. Neurophysiol. 2005, 116, 1826–1834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmad, S.A.; Chappell, P.H. Moving approximate entropy applied to surface electromyographic signals. Biomed. Signal Process. Control 2008, 3, 88–93. [Google Scholar] [CrossRef]
- Chen, W.-T.; Wang, Z.-Z.; Ren, X.-M. Characterization of surface EMG signals using improved approximate entropy. J. Zhejiang Univ. Sci. B 2006, 7, 844–848. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhou, P. Sample entropy analysis of surface EMG for improved muscle activity onset detection against spurious background spikes. J. Electromyogr. Kinesiol. 2012, 22, 901–907. [Google Scholar] [CrossRef] [PubMed]
- Lee, T.-R.; Kim, Y.H.; Sung, P.S. Spectral and entropy changes for back muscle fatigability following spinal stabilization exercises. J. Rehabil. Res. Dev. 2010, 47, 133–142. [Google Scholar] [CrossRef] [PubMed]
- Sung, P.S.; Zurcher, U.; Kaufman, M. Comparison of spectral and entropic measures for surface electromyography time series: A pilot study. J. Rehabil. Res. Dev. 2007, 44, 599. [Google Scholar] [CrossRef] [PubMed]
- Kaplanis, P.A.; Pattichis, C.S.; Zazula, D. Multiscale entropy-based approach to automated surface EMG classification of neuromuscular disorders. Med. Biol. Eng. Comput. 2010, 48, 773–781. [Google Scholar]
- Zhang, X.; Chen, X.; Barkhaus, P.E.; Zhou, P. Multiscale entropy analysis of different spontaneous motor unit discharge patterns. IEEE J. Biomed. Health Inform. 2013, 17, 470–476. [Google Scholar] [CrossRef] [PubMed]
- Costa, M.; Goldberger, A.L.; Peng, C.-K. Multiscale entropy analysis of complex physiologic time series. Phys. Rev. Lett. 2002, 89, 068102. [Google Scholar] [CrossRef] [PubMed]
- Cashaback, J.G.; Cluff, T.; Potvin, J.R. Muscle fatigue and contraction intensity modulates the complexity of surface electromyography. J. Electromyogr. Kinesiol. 2013, 23, 78–83. [Google Scholar] [CrossRef] [PubMed]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1998, 1971, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 2004, 2046, 1597–1611. [Google Scholar] [CrossRef]
- Chowdhury, R.H.; Reaz, M.; Ali, M. Determination of muscle fatigue in SEMG signal using empirical mode decomposition. In Proceedings of the 2014 IEEE Conference on Biomedical Engineering and Sciences (IECBES), Kuala Lumpur, Malaysia, 8–10 December 2014; pp. 932–937.
- Eliasson, A.-C.; Krumlinde-Sundholm, L.; Rösblad, B.; Beckung, E.; Arner, M.; Öhrvall, A.-M.; Rosenbaum, P. The Manual Ability Classification System (MACS) for children with cerebral palsy: Scale development and evidence of validity and reliability. Dev. Med. Child Neurol. 2006, 48, 549–554. [Google Scholar] [CrossRef] [PubMed]
- Andrade, A.O.; Nasuto, S.; Kyberd, P.; Sweeney-Reed, C.M.; Kanijn, F.R.V. EMG signal filtering based on Empirical Mode Decomposition. Biomed. Signal Process. Control 2006, 1, 44–55. [Google Scholar] [CrossRef]
- Shabani, S.; Parsaei, H.; Shaabany, A. Classification of EMG Signals Using Empirical Mode Decomposition. Int. J. Comput. Appl. 2012, 56, 23–28. [Google Scholar]
- Ramanand, P.; Nampoori, V.; Sreenivasan, R. Complexity quantification of dense array EEG using sample entropy analysis. J. Integr. Neurosci. 2004, 3, 343–358. [Google Scholar] [CrossRef] [PubMed]
- Kamavuako, E.N.; Farina, D.; Jensen, W. Use of Sample Entropy Extracted from Intramuscular EMG Signals for the Estimation of Force. Food Funct. 2015, 7, 125–128. [Google Scholar]
- Costa, M.; Healey, J.A. Multiscale entropy analysis of complex heart rate dynamics: Discrimination of age and heart failure effects. Comput. Cardiol. 2003, 2003, 705–708. [Google Scholar]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical mode decomposition as a filter bank. Signal Process. IEEE Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef]
- Arendt-Nielsen, L.; Mills, K.R.; Forster, A. Changes in muscle fiber conduction velocity, mean power frequency, and mean EMG voltage during prolonged submaximal contractions. Muscle Nerve 1989, 12, 493–497. [Google Scholar] [CrossRef] [PubMed]
- Bigland-Ritchie, B.; Donovan, E.; Roussos, C. Conduction velocity and EMG power spectrum changes in fatigue of sustained maximal efforts. J. Appl. Physiol. 1981, 51, 1300–1305. [Google Scholar] [PubMed]
- Pattichis, C.S.; Elia, A.G. Autoregressive and cepstral analyses of motor unit action potentials. Med. Eng. Phys. 1999, 21, 405–419. [Google Scholar] [CrossRef]
- Boonstra, T.; Daffertshofer, A.; Van Ditshuizen, J.; Van den Heuvel, M.; Hofman, C.; Willigenburg, N.; Beek, P. Fatigue-related changes in motor-unit synchronization of quadriceps muscles within and across legs. J. Electromyogr. Kinesiol. 2008, 18, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Holtermann, A.; Grönlund, C.; Karlsson, J.S.; Roeleveld, K. Motor unit synchronization during fatigue: Described with a novel sEMG method based on large motor unit samples. J. Electromyogr. Kinesiol. 2009, 19, 232–241. [Google Scholar] [CrossRef] [PubMed]
- Moritani, T.; Muro, M.; Nagata, A. Intramuscular and surface electromyogram changes during muscle fatigue. J. Appl. Physiol. 1986, 60, 1179–1185. [Google Scholar] [PubMed]
- Potvin, J.; Bent, L. A validation of techniques using surface EMG signals from dynamic contractions to quantify muscle fatigue during repetitive tasks. J. Electromyogr. Kinesiol. 1997, 7, 131–139. [Google Scholar] [CrossRef]
- Naeije, M.; Zorn, H. Relation between EMG power spectrum shifts and muscle fibre action potential conduction velocity changes during local muscular fatigue in man. Eur. J. Appl. Physiol. Occup. Physiol. 1982, 50, 23–33. [Google Scholar] [CrossRef]
- Sadoyama, T.; Masuda, T.; Miyano, H. Relationships between muscle fibre conduction velocity and frequency parameters of surface EMG during sustained contraction. Eur. J. Appl. Physiol. Occup. Physiol. 1983, 51, 247–256. [Google Scholar] [CrossRef]
- Zwarts, M.; Van Weerden, T.; Haenen, H. Relationship between average muscle fibre conduction velocity and EMG power spectra during isometric contraction, recovery and applied ischemia. Eur. J. Appl. Physiol. Occup. Physiol. 1987, 56, 212–216. [Google Scholar] [CrossRef] [PubMed]
- Castle, M.; Reyman, T.A.; Schneider, M. Pathology of spastic muscle in cerebral palsy. Clin. Orthop. Relat. Res. 1979, 142, 223–233. [Google Scholar] [CrossRef] [PubMed]
- Ito, J.-I.; Araki, A.; Tanaka, H.; Tasaki, T.; Cho, K.; Yamazaki, R. Muscle histopathology in spastic cerebral palsy. Brain Dev. 1996, 18, 299–303. [Google Scholar] [CrossRef]
- Milner-Brown, H.; Penn, R.D. Pathophysiological mechanisms in cerebral palsy. J. Neurol. Neurosurg. Psychiatry 1979, 42, 606–618. [Google Scholar] [CrossRef] [PubMed]
- Rose, J.; Haskell, W.L.; Gamble, J.G.; Hamilton, R.L.; Brown, D.A.; Rinsky, L. Muscle pathology and clinical measures of disability in children with cerebral palsy. J. Orthop. Res. 1994, 12, 758–768. [Google Scholar] [CrossRef] [PubMed]
- Rose, J.; McGill, K.C. Neuromuscular activation and motor-unit firing characteristics in cerebral palsy. Dev. Med. Child Neurol. 2005, 47, 329–336. [Google Scholar] [CrossRef] [PubMed]
- Datta, A.; Farmer, S.; Stephens, J. Central nervous pathways underlying synchronization of human motor unit firing studied during voluntary contractions. J. Physiol. 1991, 432, 401–425. [Google Scholar] [CrossRef] [PubMed]
- Farmer, S.; Swash, M.; Ingram, D.; Stephens, J. Changes in motor unit synchronization following central nervous lesions in man. J. Physiol. 1993, 463, 83–105. [Google Scholar] [CrossRef] [PubMed]
- Kukulka, C.G.; Clamann, H.P. Comparison of the recruitment and discharge properties of motor units in human brachial biceps and adductor pollicis during isometric contractions. Brain Res. 1981, 219, 45–55. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Gender | Age (Years) | Diagnosis | MACS | Tested Limb | MLF (N) |
|---|---|---|---|---|---|---|
| CP1 | M | 7.2 | Spastic | II | R | 35 |
| CP2 | M | 5.0 | Spastic | II | R | 28 |
| CP3 | M | 8.4 | Spastic | I | L | 53 |
| CP4 | M | 5.0 | Spastic | II | R | 30 |
| CP5 | M | 4.5 | Spastic | II | R | 18 |
| CP6 | F | 7.0 | Spastic | I | R | 54 |
| CP7 | F | 4.8 | Spastic | II | R | 20 |
| CP8 | F | 12.2 | Spastic | II | R | 36 |
| CP9 | M | 8.3 | Spastic | I | R | 43 |
| CP10 | M | 5.7 | Spastic | III | L | 16 |
| CP11 | M | 11.7 | Right hemiplegia | I | R | 57 |
| CP12 | M | 8.3 | Right hemiplegia | II | R | 40 |
| CP13 | F | 6.5 | Right hemiplegia | II | R | 24 |
| CP14 | M | 7.0 | Right hemiplegia | III | R | 22 |
| CP15 | M | 9.6 | Right hemiplegia | II | R | 47 |
| CP16 | M | 6.7 | Right hemiplegia | II | R | 35 |
| Subject | Gender | Age (Years) | Tested Limb | MLF (N) |
|---|---|---|---|---|
| TD1 | M | 7.8 | R | 36 |
| TD2 | M | 8.3 | R | 53 |
| TD3 | M | 7.0 | R | 60 |
| TD4 | M | 6.7 | R | 45 |
| TD5 | M | 5.2 | R | 28 |
| TD6 | F | 11.0 | R | 60 |
| TD7 | F | 7.3 | R | 40 |
| TD8 | M | 7.0 | R | 35 |
| TD9 | M | 7.0 | R | 60 |
| TD10 | F | 7.4 | R | 38 |
| TD11 | M | 12.3 | L | 68 |
| TD12 | M | 8.0 | R | 62 |
| TD13 | F | 8.3 | R | 44 |
| TD14 | F | 7.4 | R | 42 |
| TD15 | F | 8.7 | R | 60 |
| TD16 | F | 8.5 | L | 53 |
| TD17 | M | 7.7 | L | 46 |
| TD18 | M | 7.0 | R | 57 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, T.; Zhang, X.; Ma, H.; Chen, Y.; Chen, X. Fatiguing Effects on the Multi-Scale Entropy of Surface Electromyography in Children with Cerebral Palsy. Entropy 2016, 18, 177. https://doi.org/10.3390/e18050177
Hong T, Zhang X, Ma H, Chen Y, Chen X. Fatiguing Effects on the Multi-Scale Entropy of Surface Electromyography in Children with Cerebral Palsy. Entropy. 2016; 18(5):177. https://doi.org/10.3390/e18050177
Chicago/Turabian StyleHong, Tong, Xu Zhang, Hongjun Ma, Yan Chen, and Xiang Chen. 2016. "Fatiguing Effects on the Multi-Scale Entropy of Surface Electromyography in Children with Cerebral Palsy" Entropy 18, no. 5: 177. https://doi.org/10.3390/e18050177
APA StyleHong, T., Zhang, X., Ma, H., Chen, Y., & Chen, X. (2016). Fatiguing Effects on the Multi-Scale Entropy of Surface Electromyography in Children with Cerebral Palsy. Entropy, 18(5), 177. https://doi.org/10.3390/e18050177