1. Introduction
As the demand for power increases, the supply is proportionately increased. However, the cost of thermal power, which is generated by non-renewable resources, is extremely high. Therefore, the development of hydroelectric power is a more sensible choice. In this paper, the game process of power output of two hydropower enterprises is considered. In practice, there is an obvious relationship between the amount of electricity generated and the amount of water reserves. As a result, the water reserves, the current output, and the output of the time delay are mainly considered to make an electricity output plan. Therefore, it is very meaningful to study the game competition of the electricity output of the two-oligopoly enterprises.
Electricity is an energy source of great significance, related to country development and societal stability, so has always been the focus of research. As for studies on energy in relation to economic strategies and the environment, Weidou [
1] analyzed China’s energy policies and provided reasonable suggestions for the supply and consumption of China’s energy, which would ensure the sustainable development of China’s social energy economy. Nwaobi [
2] proposed an economic model based on the emission reduction policy, and gave an empirical analysis of Nigeria as an example. Vera et al. [
3] are in the process of analyzing the problem of 3E. They established a national energy index system to develop the energy policy and realize the sustainable development of society, the economy, the environment, and energy. Omri [
4] analyzed the relationship between economic growth and a group of parameters: energy consumption, electricity consumption, nuclear consumption, and renewable energy consumption.
In recent years, the oligopoly game has always been the frontier research area of renewable energy, especially the nonlinear dynamic model, which is closely related to real life. Using the entropy theory and chaos theory to establish an oligopolistic competition game model, establishing a measuring method for uncertainty, and eliminating uncertainty all have broad applicability.
Dajka et al. [
5] considered a two-player quantum game in the presence of a thermal decoherence modeled in terms of a rigorous Davies approach. This shows how the energy dissipation and pure decoherence affect the payoffs of the players of the game. Harré et al. [
6] considered the issue about how changes in the underlying incentives can move us from an optimal economy to a sub-optimal economy, meanwhile making it impossible to collectively navigate our way to a better strategy without forcing us to pass through a socially undesirable “tipping point”.
The power market of the three-oligopoly game was analyzed by Ma [
7], where the complex dynamic characteristics of the system are studied, and the dynamic behavior of the game is given, providing an excellent practical guideline that is of great significance. Batabyal [
8] took the international trade of renewable resources as the background, did corresponding analysis using the Stackelberg differential model, and pointed out that the policy tool has an important role in promoting energy conservation. This study has important implications for the conservation of renewable energy. As for the Bertrand model, Sun et al. [
9] proposed a three-oligopoly game model, which is based on the cold rolling market of China and studied the complex dynamic characteristics of the game process. Basing on the Markov information structure, Halkos et al. [
10] put forward a renewable energy and non-renewable energy Nash game, and carried out the analysis of its strategy by using the utility function, which is of great significance in practice. Liao [
11] analyzed the role of developing hydro-energy, wind energy, nuclear power, and so forth. Yoon and Ratti [
12] examined the effect of energy price uncertainty on firm-level investment with data on U.S. manufacturing firms.
Chaos analysis and applications in dynamical systems are observed in many practical applications in engineering, biology, and economics [
13,
14,
15]. Sun and Tian established an energy resource demand-supply system based on the background of the real energy resources demand and supply in the East and the West of China [
16], and have obtained a series of findings [
17,
18].
In this paper, we study the problem of the oligopoly game in the market of hydroelectric power using nonlinear theory and complex dynamics theory. We analyze the complex dynamic characteristics of the system and study the influence of the time delay and weight on the system. Moreover, an effective method for controlling a chaotic system is carried out.
This paper is organized as follows. In
Section 2, a continuous differential duopoly game mode with two delays is established. In
Section 3, we focus on analyzing the existence and stability of Hopf bifurcation. In
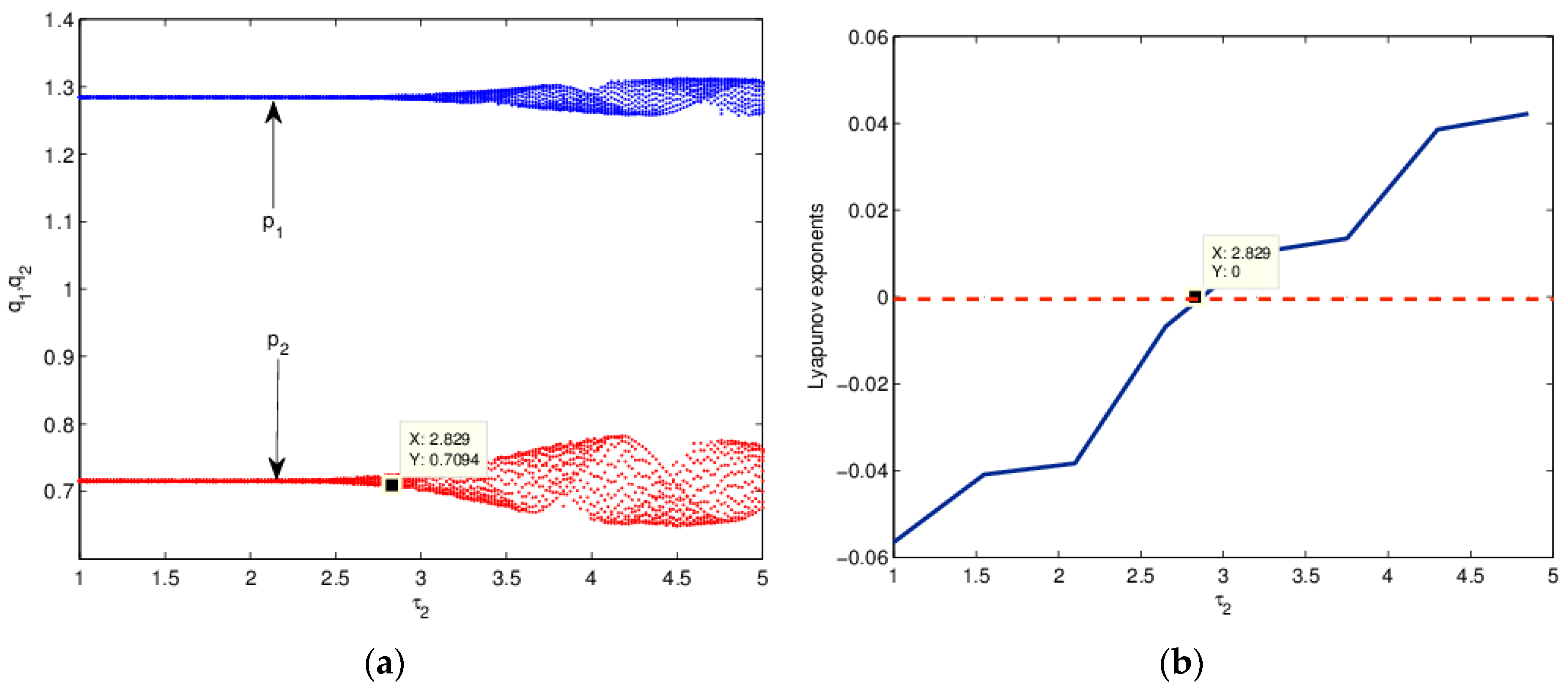
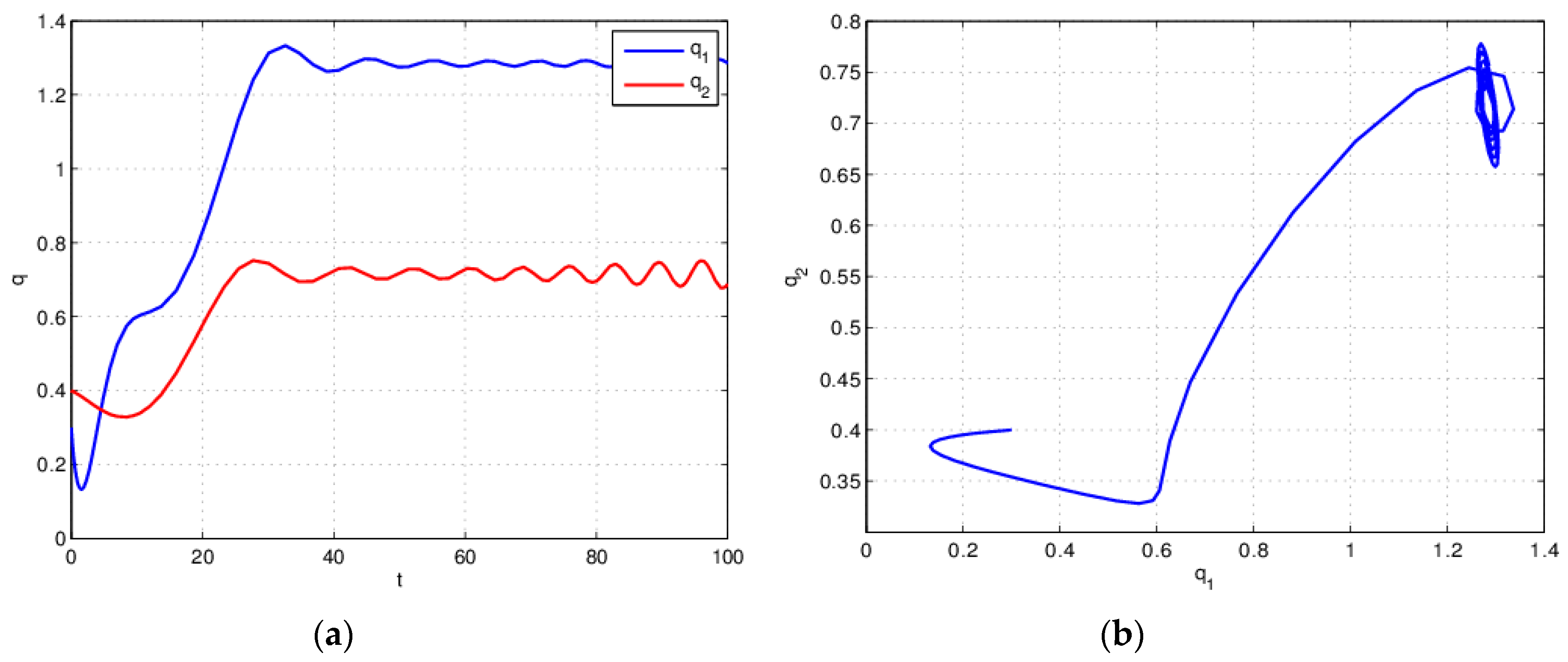
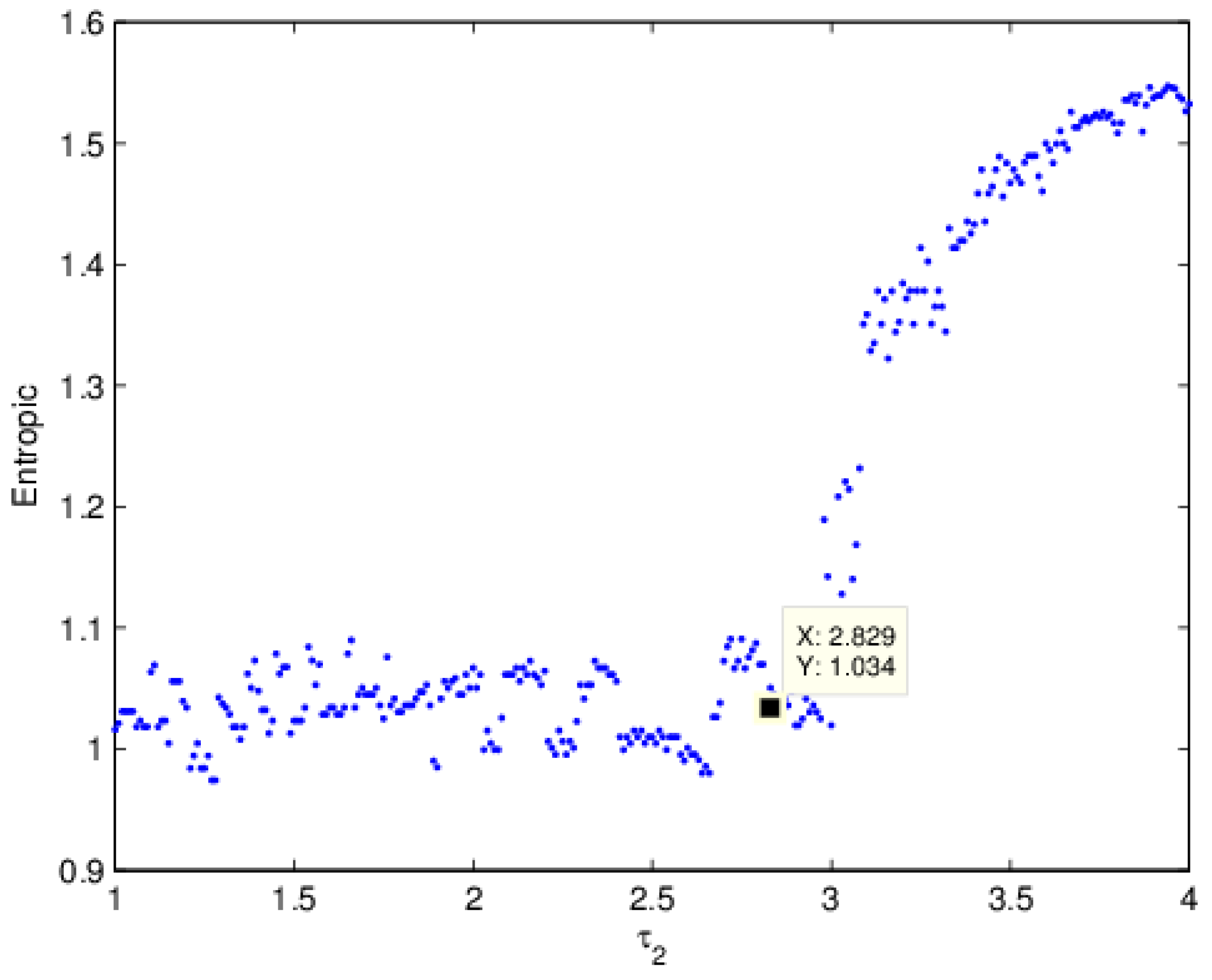
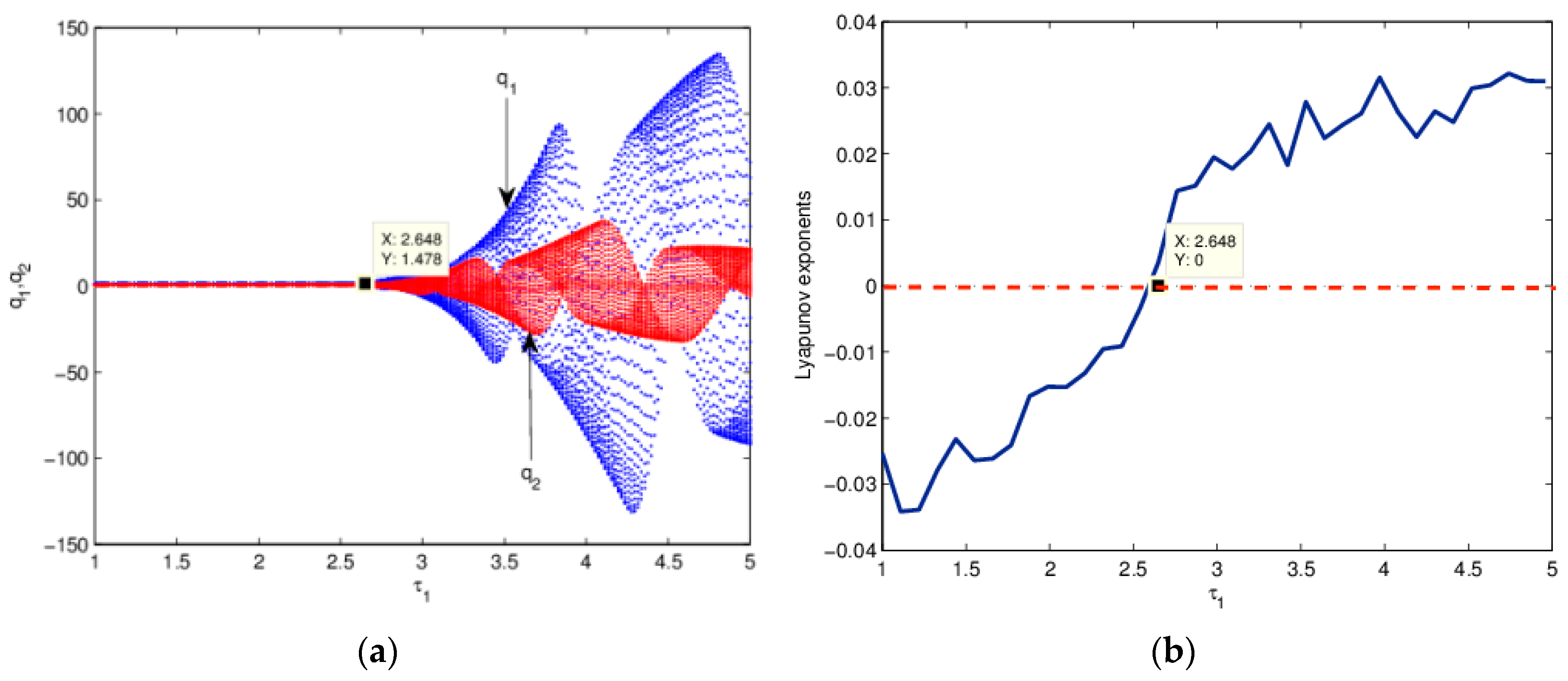
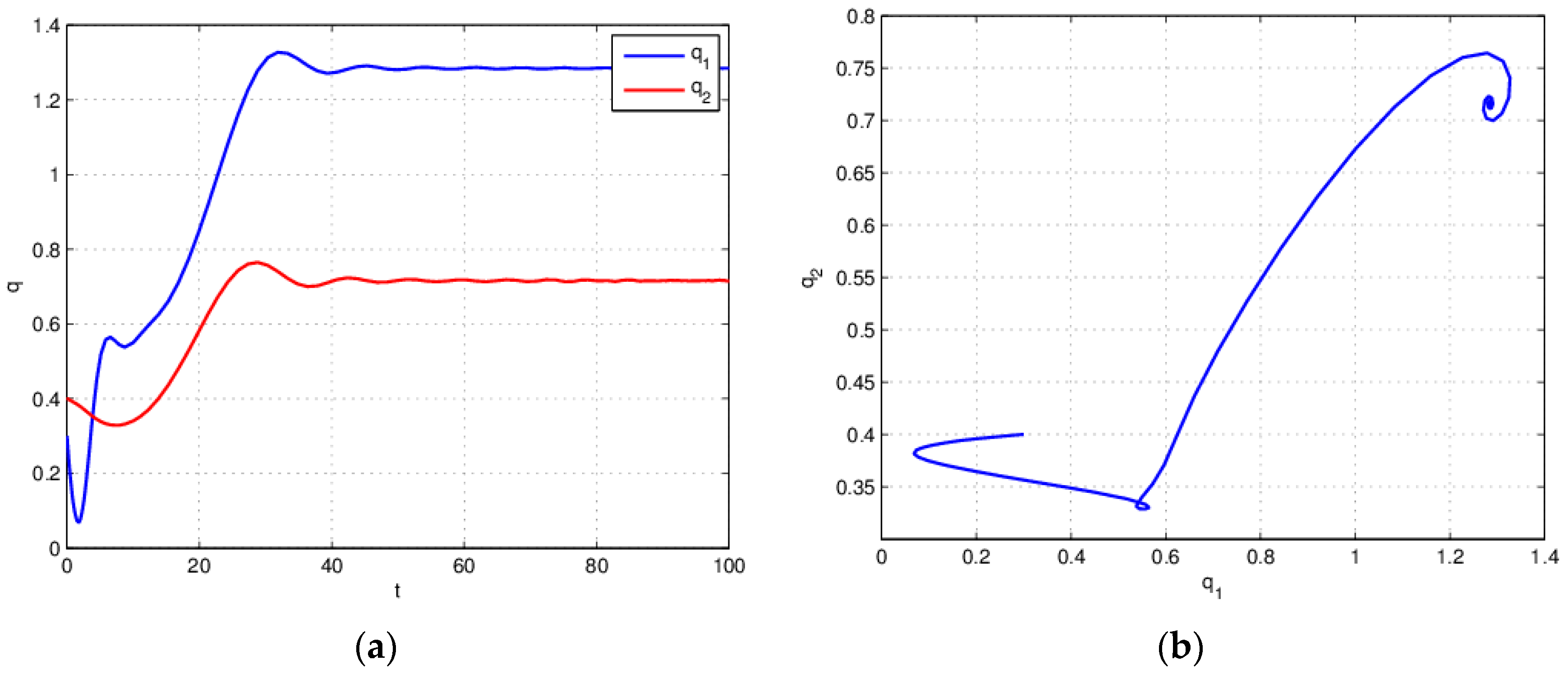
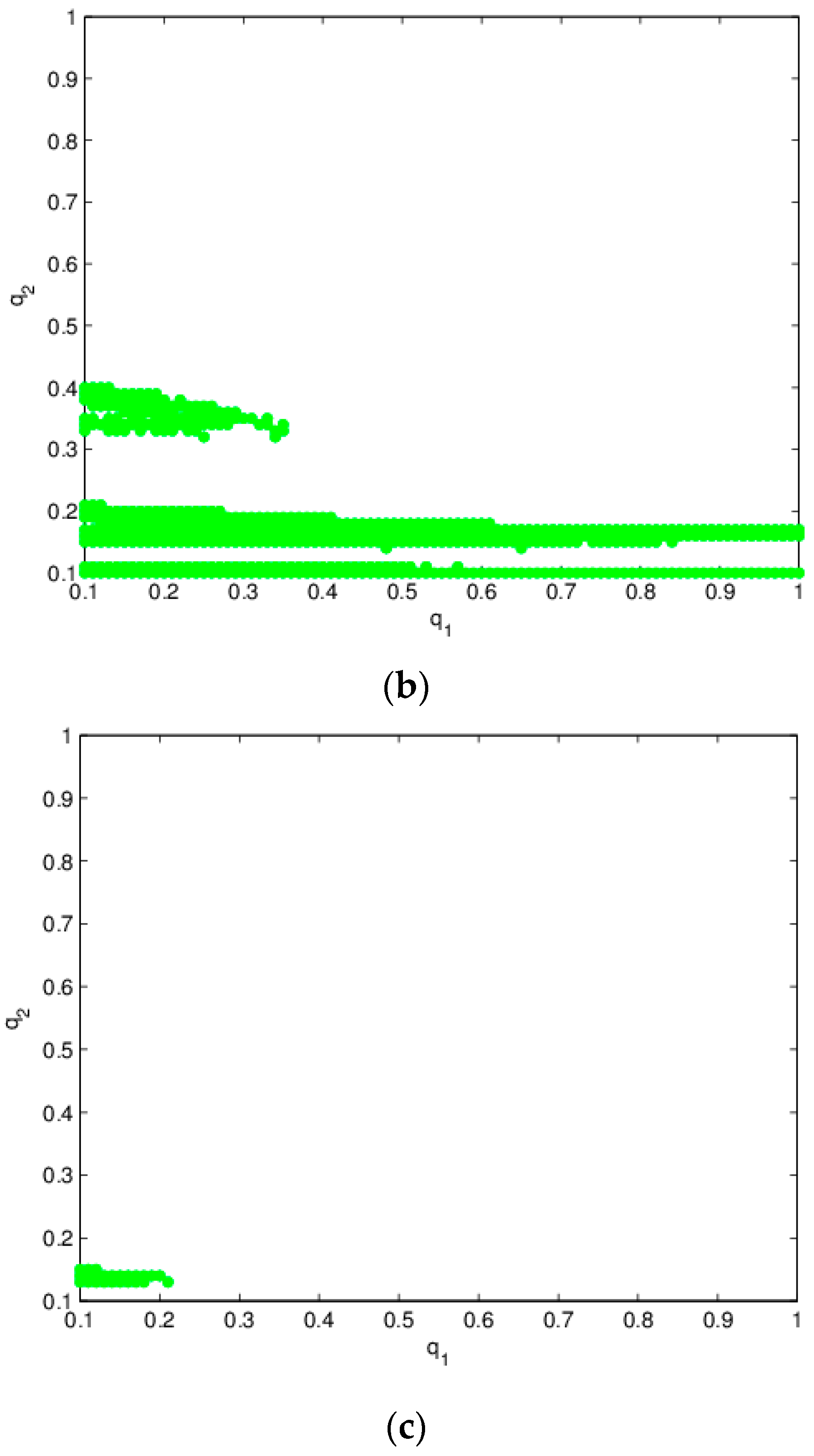
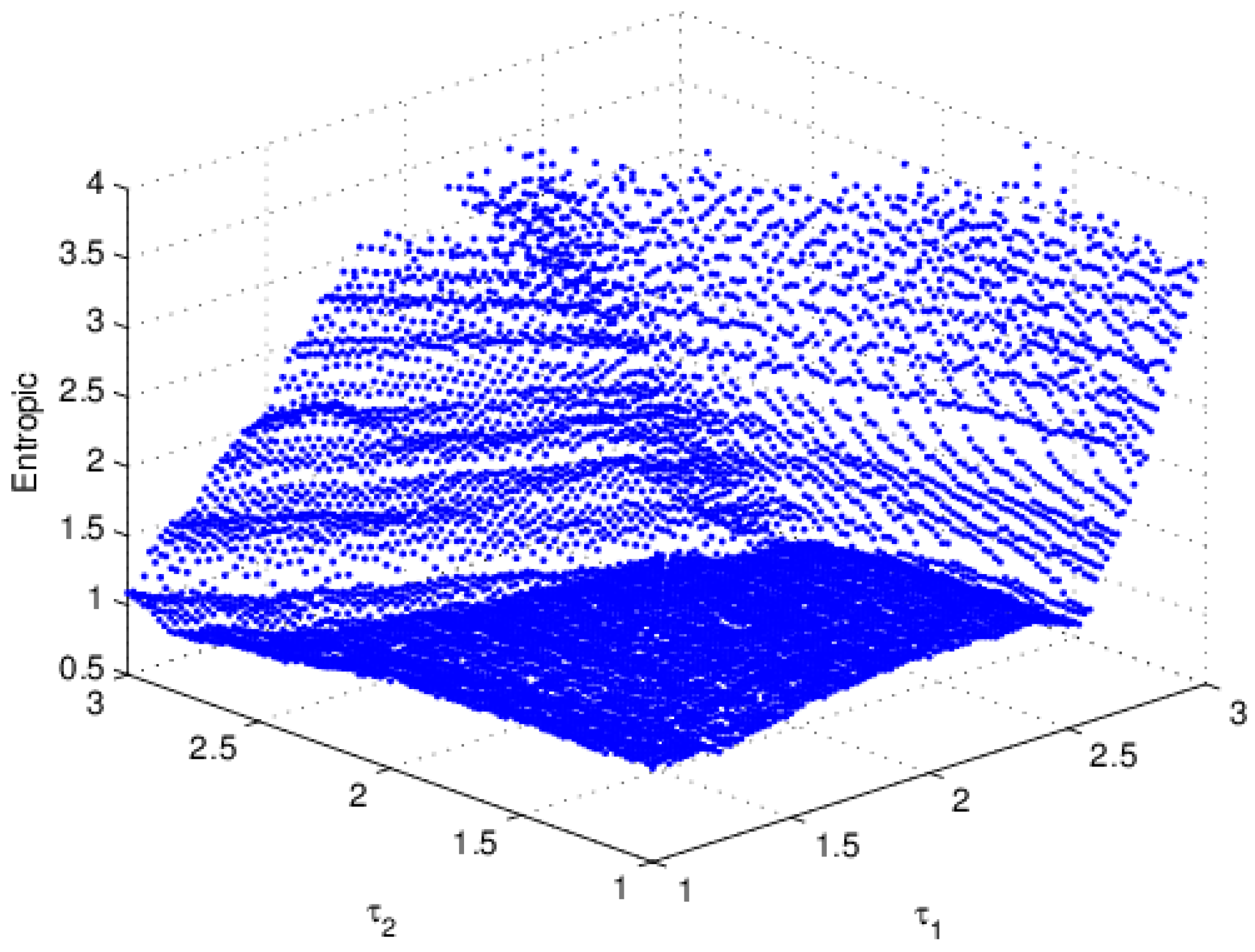
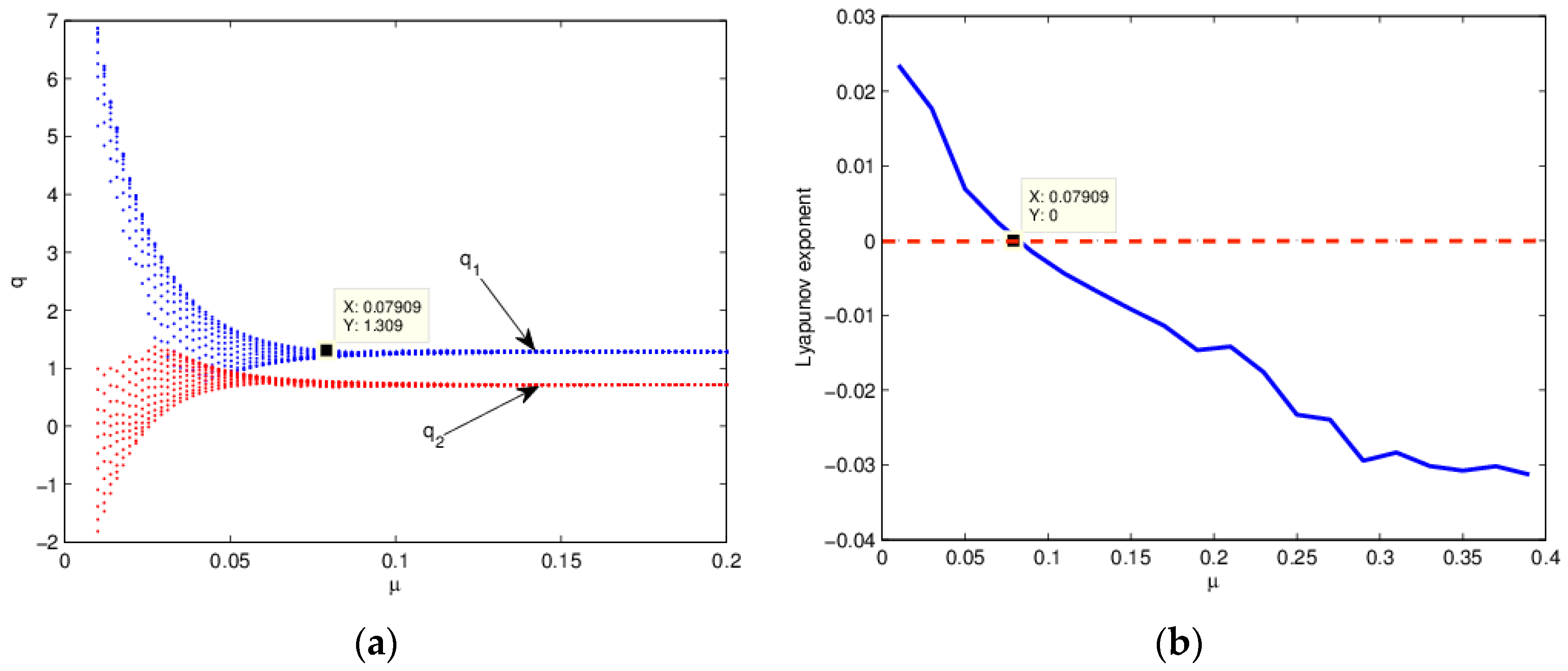
Section 4, we carry out numerical simulation and analysis by using the methods of the attractor, bifurcation diagram, Lyapunov exponent, entropic, etc. to study the influence of delay and weight on the stability of the system. In
Section 5, we elaborate on delayed feedback control, which is an effective control method of chaos. Finally, the conclusions of this paper are given in
Section 6.
2. The Model
In the market of hydroelectric power, we want to find the total economic variables: electrovalence, market demand, and water reserves. The conditions need to be met when the market reaches equilibrium. So, in this paper, we focus on the influence of the time delay parameter on the dynamic characteristics of the system.
Assumptions are listed as follows:
The electricity market is composed of two hydropower enterprises.
The output of electricity quantity is only related to the amount of water reserves and electrovalence.
Electricity price is determined by the output of electricity quantity of two enterprises and social demand.
In order to generate electricity and ensure water storage safety, the minimum water reserve is the maximum water reserve is . Therefore, the water reserves must satisfy .
The inverse demand function for the electricity market is
, where
is electrovalence,
is the demand of electrical energy, and
is the highest price of the electrical energy [
9].
In the electricity market, the cost function
is related to its own water reserves
[
10,
11].
is the water reserve when
. Obviously,
is the effective water reserve. When
, hydro power stations will suspend power generation. The unit cost of water reserves is
. If water is renewable, and the growth rate of the water reserve is
, then
. So, the water reserves should meet
.
In the process of the market game, every player in the game has to achieve its own profit maximization:
So, the problem of the game strategy for each oligopoly can be expressed as the optimization problem:
where
is discount factor,
,
,
and
.
Solving the optimization problem (1) with its Hamiltonian function:
where
is a co-state variable. Solving:
Simultaneously we can obtain:
The sum of the two parts of Equation (4) is obtained, and, using
and
, we can derive:
With Equations (4) and (5), we can calculate the game strategy for each oligopoly as:
In the actual operation of the electricity market, in order to ensure the sustainable development of electric energy, as well as the stability of the electrovalence, the electricity supply of the market should be fixed in a certain period of time, to ensure that the supply of electricity is not too large or too small, which leads to fluctuations in market price. Suppose that in a certain period of time, the largest electricity supply is , so positive correlation with , is the change rate of electricity supply.
Therefore, integrating Equations (5) and (6) and
, we can obtain a double oligopoly game model for the hydroelectric power market:
In the actual operation process of the electric power enterprise, it is not only necessary to consider the current market demand; we also need to consider the market demand of
time early, which makes the final decision results closer to the actual situation. In this paper, we assume that the duopoly considers time delay. The delay parameters are
and
respectively. That is:
and
,
is the weight of the current period price.
We know that the time delay does not affect the system’s solution. Therefore, the equilibrium point
of Equation (7) is also the equilibrium point with a time delay system. So, in this paper, we analyze the delay decision with the equilibrium point of
. Then, from Equations (7) and (8), the linear system with time delay is:
5. Chaos Control
Through the previous analysis, we know that if the parameter values are not reasonable, the system will be instable, even chaotic. A system in a state of chaos will lead to market fluctuations. Therefore, some measures must be taken to maintain the stability of the system. The instable system can be controlled to restore it to a stable state.
From the analysis in
Section 4.2, we know that when
, the system is chaotic; the effect is shown in
Figure 7. From
Figure 10 of
Section 4.3,
is in the blue region; it can be clearly seen that the system is chaotic. We consider the following control system using the delayed feedback control method:
Only adjusting the control parameter
while the other parameters are kept constant to realize the control of chaos. Similar to the derivation process in
Section 3, the system can obtain bifurcation point
for
,
. From
Figure 14, we can see that Equation (26) changes from a chaotic state to a steady state as
increases. When
, the system undergoes bifurcation. That is to say, when
, the system is chaotic; when
, the system is stable.
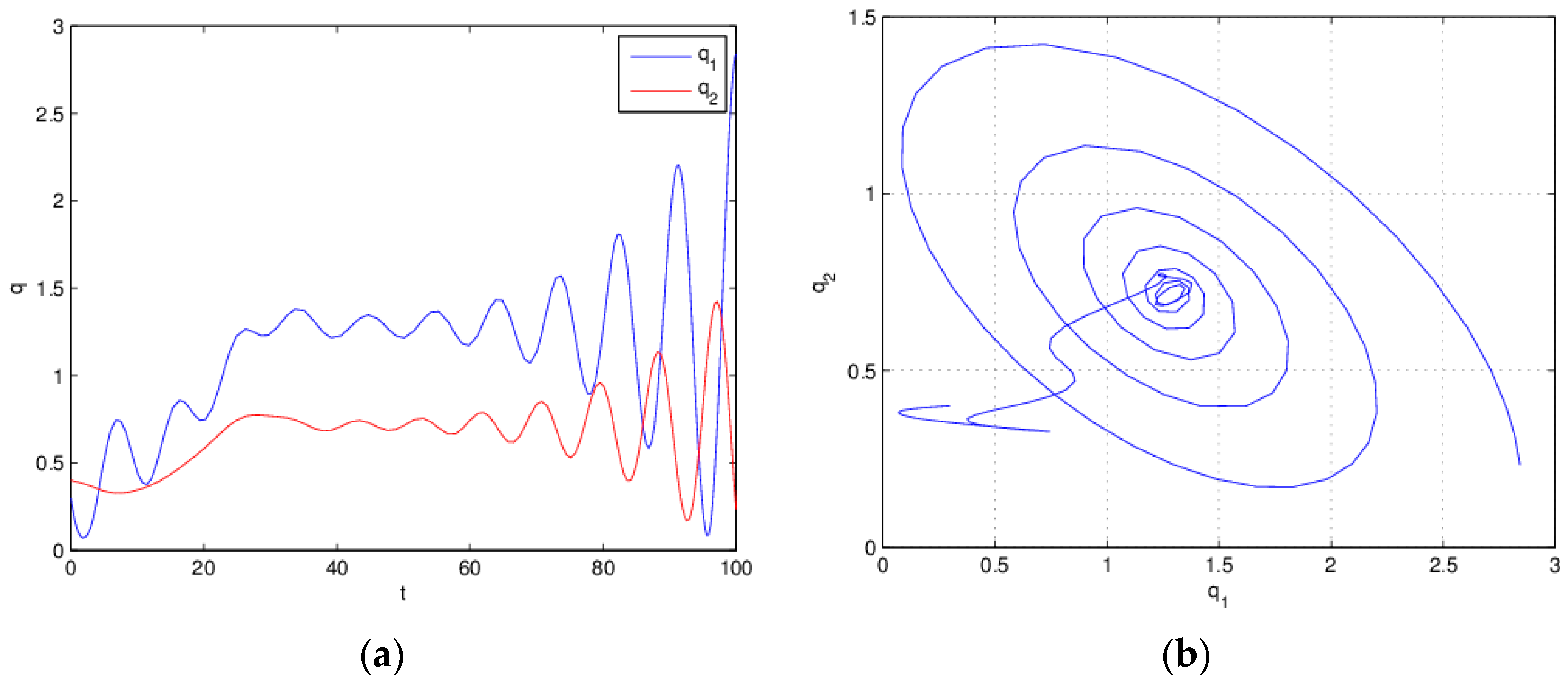
In order to verify the correctness of the above analysis, set
; according to the analysis, the system should be chaotic at this time.
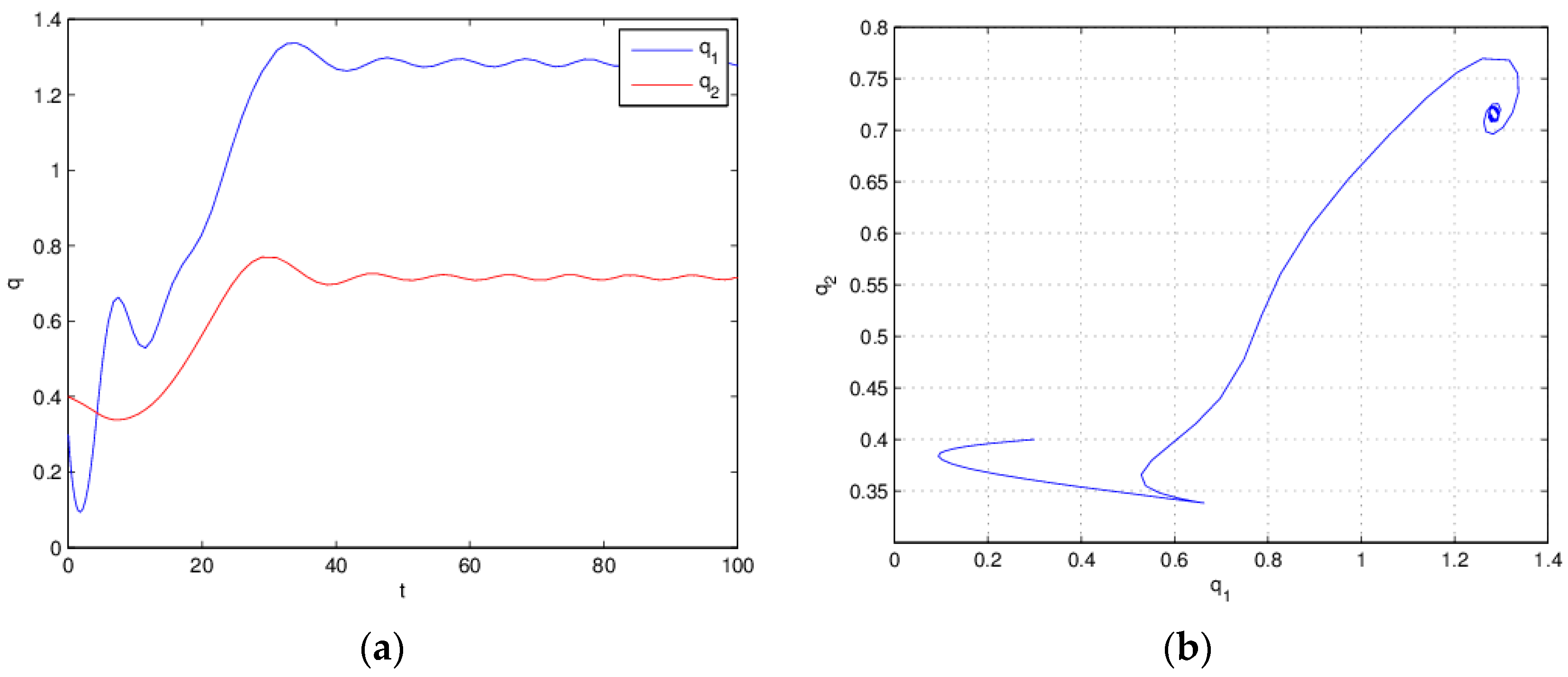
Figure 15 proves the correctness of the conclusion. When we let
, it can be seen that the system is stable at this time in
Figure 16; that is, the chaotic system has been effectively controlled.
6. Conclusions
A game model of the duopoly with two delays in the hydropower market is established. The influence of time delay parameters on the stability of the game model is studied. Firstly, the existence and stability of Hopf bifurcation are studied, and the conditions of bifurcation are given. The analysis is carried out in two aspects: , and , . Secondly, the numerical simulation and analysis are carried out on the theoretical derivation. The specific analysis is developed from four aspects: the influence of on the stability of the system for simulated by using time series, attractor, bifurcation diagram, Lyapunov exponent, and entropic; fixed, the influence of on the stability of the system discussed by using time series and basin of attraction; the influence of and on the stability of the system displayed by 3D surface chart, 2D parameter bifurcation diagram, and 3D entropic diagram; the influence of , , and on the stability of the system simulated through a 4D cubic chart and 3D parameter bifurcation diagram. The stability regions of the system are given for each aspect of the specific analysis. The conclusions of the above analysis can provide decision-making guidelines for enterprises to maintain market stability. Finally, the chaotic system is controlled effectively by the method of delayed feedback control, which can efficiently return a chaotic system to a stable state. For future study, we can consider the influence of more factors on the stability of the system, so that it is closer to reality.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















