1. Introduction
In an attempt to generalize classical thermodynamics to irreversible nonequilibrium thermodynamics, a relatively new framework has been developed that combines stochasticity and nonequilibrium dynamics. This framework is known as stochastic thermodynamics [
1,
2,
3,
4,
5] and goes beyond linear irreversible thermodynamics addressing transport properties and entropy production in terms of forces and fluxes via linear system response theory [
6,
7,
8,
9]. Stochastic thermodynamics is applicable to nonequilibrium systems extending the validity of the laws of thermodynamics beyond the linear response regime by providing a system thermodynamic paradigm formulated on the level of individual system state realizations that are arbitrarily far from equilibrium. The thermodynamic variables of heat, work, and entropy, along with the concomitant first and second laws of thermodynamics, are formulated on the level of individual dynamical system trajectories using stochastic differential equations.
The nonequilibrium conditions in stochastic thermodynamics are imposed by an exogenous stochastic disturbance or an initial system state that is far from the system equilibrium resulting in an open (i.e., driven) or relaxation dynamical process. More specifically, the exogenous disturbance is modeled as an independent standard Wiener process (i.e., Brownian motion) defined on a complete filtered probability space wherein the current state is only dependent on the most recent event. The stochastic system dynamics are described by an overdamped Langevin equation [
2,
3] in which fluctuation and dissipation forces obey the Einstein relation expressing that diffusion is a result of both thermal fluctuations and frictional dissipation [
10].
Brownian motion refers to the irregular movement of microscopic particles suspended in a liquid and was discovered [
11,
12] by the botanist Robert Brown [
13]. This random motion is explained as the result of collisions between the suspended particles (i.e., Brownian particles) and the molecules of the liquid. Einstein was the first to formulate the theory of Brownian motion by assuming that the particles suspended in the liquid contribute to the thermal fluctuations of the medium and, in accordance with the principle of equipartition of energy [
14], the average translational kinetic energy of each particle [
10]. Thus, Brownian motion results from collisions by molecules of the fluid, wherein the suspended particles acquire the same average kinetic energy as the molecules of the fluid. This theory suggested that all matter consists of atoms (or molecules) and heat is the energy of motion (i.e., kinetic energy) of the atoms.
The use of statistical methods in developing a general molecular theory of heat predicated on random motions of Newtonian atoms led to the connection between the dynamics of heat flow and the behavior of electromagnetic radiation. A year after Einstein published his theory on Brownian motion, Smoluchovski [
15] confirmed the relation between friction and diffusion. In an attempt to simplify Einstein’s theory of Brownian motion, Langevin [
16] was the first to model the effect of Brownian motion using a stochastic differential equation (now known as a Langevin equation) wherein spherical particles are suspended in a medium and acted upon by external forces.
In stochastic thermodynamics, the Langevin equation captures the coupling between the system particle damping and the energy input to the particles via thermal effects. Namely, the frictional forces extract the particle kinetic energy, which in turn is injected back to the particles in the form of thermal fluctuations. This captures the phenomenological behavior of a Brownian particle suspended in a fluid medium which can be modeled as a continuous Markov process [
17]. Specifically, since collisions between the fluid molecules and a Brownian particle are more inelastic at higher viscosities, and temperature decreases with increasing viscosity in a fluid, additional heat is transferred to the fluid to maintain its temperature in accordance with the equipartition theorem. This heat is transferred to the Brownian particle through an increased disturbance intensity by the fluid molecules. These collisions between the Brownian particle and fluid molecules result in the observed persistent irregular and random motion of the particles.
The balance between damping (i.e., deceleration) of the particles due to frictional effects resulting in local heating of the fluid, and consequently entropy production, and the energy injection of the particles due to thermal fluctuations resulting in local cooling of the fluid, and consequently entropy consumption, is quantified by fluctuation theorems [
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28]. Thus, even though, on average, the entropy is positive (i.e., entropy production), there exist sample paths wherein the entropy decreases, albeit with an exponentially lower probability than that of entropy production. In other words, a stochastic thermodynamic system exhibits a symmetry in the probability distribution of the entropy production in the asymptotic nonequilibrium process.
Fluctuation theorems give a precise prediction for the cases in which entropy decreases in stochastic thermodynamic systems and provide a key relation between entropy production and irreversibility. Specifically, the entropy production of individual sample path trajectories of a stochastic thermodynamic system described by a Markov process is not restricted by the second law, but rather the average entropy production is determined to be positive. Furthermore, the notions of heat and work in stochastic thermodynamic systems allow for a formulation of the first law of thermodynamics on the level of individual sample path trajectories with microscopic states (i.e., positions and velocities) governed by a stochastic Langevin equation and macroscopic states governed by a Fokker–Planck equation [
29] (or a Kolmogorov forward equation, depending on context) describing the evolution of the probability density function of the microscopic (stochastic) states.
In this paper, we combine our large-scale thermodynamic system model developed in [
30] with stochastic thermodynamics to develop a stochastic dynamical systems framework of thermodynamics. Specifically, we develop a large-scale dynamical system model driven by Markov diffusion processes to present a unified framework for statistical thermodynamics predicated on a stochastic dynamical systems formalism. In particular, using a stochastic state space formulation, we develop a nonlinear stochastic compartmental dynamical system model characterized by energy conservation laws that is consistent with statistical thermodynamic principles. Moreover, we show that the difference between the average supplied system energy and the average stored system energy for our stochastic thermodynamic model is a martingale with respect to the system filtration. In addition, we show that the average stored system energy is equal to the mean energy that can be extracted from the system and the mean energy that can be delivered to the system in order to transfer it from a zero energy level to an arbitrary nonempty subset in the state space over a finite stopping time.
Finally, using the system ectropy [
30] as a Lyapunov function candidate, we show that in the absence of energy exchange with the environment the proposed stochastic thermodynamic model is stochastically semistable in the sense that all sample path trajectories converge almost surely to a set of equilibrium solutions, wherein every equilibrium solution in the set is almost surely Lyapunov stable. In addition, we show that the steady-state distribution of the large-scale sample path system energies is uniform, leading to system energy equipartitioning corresponding to a maximum entropy equilibrium state.
2. Stochastic Dynamical Systems
To extend the dynamical thermodynamic formulation of [
30] to stochastic thermodynamics we need to establish some notation, definitions, and mathematical preliminaries. A review of some basic results on nonlinear stochastic dynamical systems is given in [
31,
32,
33,
34,
35]. Recall that given a sample space
, a
-algebra
on
is a collection of subsets of
such that
, if
, then
, and if
, then
and
. The pair (
) is called a
measurable space and the
probability measure defined on (
) is a function
such that
,
, and if
and
,
, then
. The triple (
) is called a
probability space if
contains all subsets of
with
-outer measure [
36] zero [
33].
The subsets of belonging to are called -measurable sets. If and is the family of all open sets in , then is called the Borel σ-algebra and the elements of are called Borel sets. If () is a given probability space, then the real valued function (random variable) is -measurable if for all Borel sets . Given the probability space (), a filtration is a family of -algebras such that for all .
In this paper, we use the notation and terminology as established in [
37]. Specifically, define a complete probability space as
, where
denotes the sample space,
denotes a
-algebra, and
defines a probability measure on the
-algebra
; that is,
is a nonnegative countably additive set function on
such that
[
32]. Furthermore, we assume that
is a standard
d-dimensional Wiener process defined by
, where
is the classical Wiener measure ([
33], p. 10), with a continuous-time filtration
generated by the Wiener process
up to time
t.
We denote a stochastic dynamical system by generating a filtration adapted to the stochastic process on satisfying , , such that , , for all Borel sets contained in the Borel -algebra . We say that the stochastic process is -adapted if is -measurable for every . Furthermore, we say that satisfies the Markov property if the conditional probability distribution of the future states of the stochastic process generated by only depends on the present state. In this case, generates a Markov process which results in a decoupling of the past from the future in the sense that the present state of contains sufficient information so as to encapsulate the effects of the past system inputs. Here we use the notation to represent the stochastic process omitting its dependence on . Furthermore, denotes the -algebra of Borel sets in and denotes a -algebra generated on a set .
We denote the set of equivalence classes of measurable, integrable, and square-integrable or (depending on context) valued random processes on over the semi-infinite parameter space by , , and , respectively, where the equivalence relation is the one induced by -almost-sure equality. In particular, elements of take finite values -almost surely (a.s.) or with probability one. Hence, depending on the context, will denote either the set of real variables or the subspace of comprising of random processes that are constant almost surely. All inequalities and equalities involving random processes on are to be understood to hold -almost surely. Furthermore, and denote, respectively, the expectation with respect to the probability measure and with respect to the classical Wiener measure .
Given , denotes the set , and so on. Given and , we say x is nonzero on if . Furthermore, given and a -algebra , and denote, respectively, the expectation of the random variable x and the conditional expectation of x given , with all moments taken under the measure . In formulations wherein it is clear from context which measure is used, we omit the symbol in denoting expectation, and similarly for conditional expectation. Specifically, in such cases we denote the expectation with respect to the probability space by , and similarly for conditional expectation.
A stochastic process on is called a martingale with respect to the filtration if and only if is a -measurable random vector for all , , and for all . Thus, a martingale has the property that the expectation of the next value of the martingale is equal to its current value given all previous values of the dynamical process. If we replace the equality in with “≤” (respectively, “≥”), then is a supermartingale (respectively, submartingale). Note that every martingale is both a submartingale and supermartingale.
A random variable is called a stopping time with respect to if and only if , . Thus, the set of all such that is a -measurable set. Note that can take on finite as well as infinite values and characterizes whether at each time t an event at time has occurred using only the information in .
Finally, we write for the Euclidean vector norm, and for the i-th row and j-th column of a matrix , tr(·) for the trace operator, for the inverse operator, for the Freéchet derivative of V at x, for the Hessian of V at x, and for the Hilbert space of random vectors with finite average power, that is, . For an open set , ≜ denotes the set of all the random vectors in induced by . Similarly, for every , ≜ . Moreover, and denote the nonnegative and positive orthants of , that is, if , then and are equivalent, respectively, to and , where (respectively, ) indicates that every component of x is nonnegative (respectively, positive). Furthermore, denotes the space of real-valued functions that are two-times continuously differentiable with respect to . Finally, we write as to denote that approaches the set , that is, for every there exists such that for all , where .
Definition 1. Let and be measurable spaces, and let . If the function is -measurable in for a fixed and is a probability measure in for a fixed , then μ is called a (probability) kernel
from S to T. Furthermore, for , the function is called a regular conditional probability measure
if is measurable, is a probability measure, and satisfieswhere , , and , , is the transition probability
of the point at time instant s into all Borel subsets at time instant t. Any family of regular conditional probability measures
satisfying the Chapman– Kolmogorov equation ([
32])
or, equivalently,
where
,
, and
, is called a
semigroup of Markov kernels. The Markov kernels are called
time homogeneous if and only if
holds for all
.
Consider the nonlinear stochastic dynamical system
given by
where, for every
,
is a
-measurable random state vector,
,
is relatively open set with
,
is a
d-dimensional independent standard Wiener process (i.e., Brownian motion) defined on a complete filtered probability space
,
is independent of
and
are continuous,
is nonempty, and
,
, is the maximal interval of existence for the solution
of (
4).
An
equilibrium point of (
4) is a point
such that
and
. It is easy to see that
is an equilibrium point of (
4) if and only if the constant stochastic process
is a solution of (
4). We denote the set of equilibrium points of (
4) by
.
The filtered probability space
is clearly a real vector space with addition and scalar multiplication defined componentwise and pointwise. A
-valued stochastic process
is said to be a
solution of (
4) on the time interval
with initial condition
if
is
progressively measurable (i.e.,
is nonanticipating and measurable in
t and
) with respect to the filtration
,
,
, and
where the integrals in (
5) are Itô integrals [
38]. If the map
,
, had a bounded variation, then the natural definition for the integrals in (
5) would be the Lebesgue-Stieltjes integral where
is viewed as a parameter. However, since sample Wiener paths are nowhere differentiable and not of bounded variation for almost all
the integrals in (
5) need to be defined as Itô integrals [
39,
40].
Note that for each fixed
, the random variable
assigns a vector
to every outcome
of an experiment, and for each fixed
, the mapping
is the
sample path of the stochastic process
,
. A path-wise solution
of (
4) in
is said to be
right maximally defined if
x cannot be extended (either uniquely or non-uniquely) forward in time. We assume that all right maximal path-wise solutions to (
4) in
exist on
, and hence, we assume that (
4) is
forward complete. Sufficient conditions for forward completeness or
global solutions of (
4) are given in [
34,
38].
Furthermore, we assume that
and
satisfy the uniform Lipschitz continuity condition
and the growth restriction condition
for some Lipschitz constant
, and hence, since
and
is independent of
it follows that there exists a unique solution
of (
4) forward in time for all initial conditions in the following sense. For every
there exists
such that if
and
are two solutions of (
4); that is, if
with continuous sample paths almost surely solve (
4), then
and
.
The uniform Lipschitz continuity condition (
6) guarantees uniqueness of solutions, whereas the linear growth condition (
7) rules out finite escape times. A weaker sufficient condition for the existence of a unique solution to (
4) using a notion of (finite or infinite) escape time under the local Lipschitz continuity condition (
6) without the growth condition (
7) is given in [
41]. Alternatively, existence and uniqueness of solutions even when the uniform Lipschitz continuity condition (
6) does not hold are given in ([
38], p. 152).
The unique solution to (
4) determines a
-valued, time homogeneous Feller continuous Markov process
, and hence, its stationary Feller transition probability function is given by (([
31], Theorem 3.4), ([
32], Theorem 9.2.8))
for all
and all Borel subsets
of
, where
denotes the probability of transition of the point
at time instant
s into the set
at time instant
t. Recall that every continuous process with Feller transition probability function is also a strong Markov process ([
31] p. 101). Finally, we say that the dynamical system (
4) is
convergent in probability with respect to the closed set
if and only if the pointwise
exists for every
and
.
Here, the measurable map
is the
dynamic or
flow of the stochastic dynamical system (
2) and, for all
, satisfies the
cocycle property
and the
identity (on
) property
for all
and
. The measurable map
is continuously differentiable for all
outside a
-null set and the sample path trajectory
is continuous in
for all
. Thus, for every
, there exists a trajectory of measures defined for all
satisfying the dynamical processes (
4) with initial condition
. For simplicity of exposition we write
for
omitting its dependence on
.
Definition 2. A point is a limit point
of the trajectory of (
4)
if there exists a monotonic sequence of positive numbers, with as , such that as . The set of all limit points of , is the limit set
of of (
4).
It is important to note that the
-limit set of a stochastic dynamical system is a
-limit set of a trajectory of measures, that is,
is a weak limit of a sequence of measures taken along every sample continuous bounded trajectory of (
4). It can be shown that the
-limit set of a stationary stochastic dynamical system attracts bounded sets and is measurable with respect to the
-algebra of invariant sets. Thus, the measures of the stochastic process
tend to an invariant set of measures and
asymptotically tends to the closure of the support set (i.e., kernel) of this set of measures almost surely.
However, unlike deterministic dynamical systems, wherein
-limit sets serve as global attractors, in stochastic dynamical systems stochastic invariance (see Definition 4) leads to
-limit sets being defined for each fixed sample
of the underlying probability space
, and hence, are path-wise attractors. This is due to the fact that a cocycle property rather than a semigroup property holds for stochastic dynamical systems. For details see [
42,
43,
44].
Definition 3 ([
33], Def. 7.7).
Let be a time-homogeneous Markov process in and let . Then the infinitesimal generator
of , , with , is defined bywhere denotes the expectation with respect to the transition probability measure . If
and has a compact support [
45], and
,
, satisfies (
4), then the limit in (
9) exists for all
and the infinitesimal generator
of
,
, can be characterized by the system
drift and
diffusion functions
and
defining the stochastic dynamical system (
4) and is given by ([
33], Theorem 7.9)
Next, we extend Proposition 2.1 of [
30] to stochastic dynamical systems. First, however, the following definitions on stochastic invariance and essentially nonnegative vector fields are needed.
Definition 4. A relatively open set is invariant with respect to (
4)
if is Borel and, for all , , . Definition 5. Let . Then f is essentially nonnegative if for all and such that , where denotes the i-th component of x.
Proposition 1. Suppose . Then is an invariant set with respect to (4) if and only if is essentially nonnegative and , , whenever , . Proof. Define dist
,
. Now, suppose
is essentially nonnegative and let
. For every
, if
, then
for all
and all
, whereas, if
, then it follows from the continuity of
and the sample continuity of
that
for all
sufficiently small and all
. Thus,
for all sufficiently small
and all
, and hence,
. It now follows from Lemma 2.1 of [
46], with
, that
for all
.
Conversely, suppose that
is invariant with respect to (
4), let
, and suppose, ad absurdum,
x is such that there exists
such that
and
for all
. Then, since
f and
D are continuous and a Wiener process
can be positive or negative with equal probability, there exists sufficiently small
such that
for all
, where
is the solution to (
4). Hence,
is strictly decreasing on
with nonzero probability, and thus,
for all
, which leads to a contradiction. ☐
It follows from Proposition 1 that if
, then
,
, if and only if
f is essentially nonnegative and
,
, whenever
,
. In this case, we say that (
4) is a
stochastic nonnegative dynamical system. Henceforth, we assume that
f and
D are such that the nonlinear stochastic dynamical system (
4) is a stochastic nonnegative dynamical system.
4. Semistability of Stochastic Nonnegative Dynamical Systems
As shown in [
30], thermodynamic systems give rise to systems that possess a continuum of equilibria. In this section, we develop a stability analysis framework for stochastic systems having a continuum of equilibria. Since, as noted in [
37,
52], every neighborhood of a non-isolated equilibrium contains another equilibrium, a non-isolated equilibrium cannot be asymptotically stable. Hence, asymptotic stability is not the appropriate notion of stability for systems having a continuum of equilibria. Two notions that are of particular relevance to such systems are
convergence and
semistability. Convergence is the property whereby every system solution converges to a limit point that may depend on the system initial condition. Semistability is the additional requirement that all solutions converge to limit points that are Lyapunov stable. Semistability for an equilibrium thus implies Lyapunov stability, and is implied by asymptotic stability.
In this section, we present necessary and sufficient conditions for stochastic semistability. It is important to note that stochastic semistability theory was also developed in [
37] for a stronger set of stability in probability definitions. The results in this section, though parallel the results in [
37], are predicated on a weaker set of stability in probability definitions, and hence, provide a stronger set of semistability results. First, we present several key propositions. The following proposition gives a sufficient condition for a trajectory of (
4) to converge to a limit point. For this result,
denotes a positively invariant set with respect to (
4) and
denotes the image of
under the flow
, that is,
.
Proposition 2. Consider the nonlinear stochastic nonnegative dynamical system (4) and let . If the limit set of (4) contains a Lyapunov stable in probability (with respect to ) equilibrium point y, then , that is, as . Proof. Suppose is Lyapunov stable in probability with respect to and let be a relatively open neighborhood of y. Since y is Lyapunov stable in probability with respect to , there exists a relatively open neighborhood of y such that as for every . Now, since , it follows that there exists such that . Hence, for every . Since is arbitrary, it follows that . Thus, as for every sequence , and hence, as . ☐
The following definition introduces the notion of stochastic semistability.
Definition 8. An equilibrium solution of (
4)
is stochastically semistable with respect to
if the following statements hold. - (i)
For every , Equivalently, for every and , there exist such that, for all , - (ii)
. Equivalently, for every , there exist such that if , then
The dynamical system (
4)
is stochastically semistable with respect to
if every equilibrium solution of (
4)
is stochastically semistable with respect to . Finally, the dynamical system (
4)
is globally stochastically semistable with respect to
if (
i)
holds and for all . Note that if
only satisfies (i) in Definition 8, then the equilibrium solution
of (
4) is Lyapunov stable in probability with respect to
.
Definition 9. For a given , the -domain of semistability with respect to
is the set of points such that if , , is a solution to (4) with , then converges to a Lyapunov stable (with respect to ) in probability equilibrium point in with probability greater than or equal to . Note that if (
4) is stochastically semistable, then its
-domain of semistability contains the set of equilibria in its interior.
Next, we present alternative equivalent characterizations for stochastic semistability of (
4). This result is an extension of Proposition 2.2 of [
37] to the more general semistability definition presented in this paper.
Proposition 3. Consider the nonlinear stochastic nonnegative dynamical system given by (4). Then the following statements are equivalent: (i) is stochastically semistable with respect to .
() For every and , there exist class and functions and , respectively, and such that, if , thenand , . (iii) For every and , there exist class functions and , a class function , and such that, if , then Proof. To show that (i) implies (ii), suppose (
4) is stochastically semistable with respect to
and let
. It follows from Lemma 1 that for every
there exists
and a class
function
such that if
, then
,
. Without loss of generality, we can assume that
is such that
is contained in the
-domain of semistability of (
4). Hence, for every
,
and, consequently,
.
For every
,
, and
, define
to be the infimum of
T with the property that
, that is,
For each
and
, the function
is nonnegative and nonincreasing in
, and
for sufficiently large
.
Next, let . We claim that T is well defined. To show this, consider , , and . Since , it follows from the sample continuity of s that, for every and , there exists an open neighborhood of such that for every . Hence, implying that the function is upper semicontinuous at the arbitrarily chosen point , and hence on . Since an upper semicontinuous function defined on a compact set achieves its supremum, it follows that is well defined. The function is the pointwise supremum of a collection of nonnegative and nonincreasing functions, and hence is nonnegative and nonincreasing. Moreover, for every .
Let . The function is positive, continuous, strictly decreasing, and as . Choose . Then is positive, continuous, strictly decreasing, and . Furthermore, . Hence, , .
Next, to show that (ii) implies (iii), suppose (ii) holds and let
. Then it follows from (i) of Lemma 1 that
is Lyapunov stable in probability with respect to
. For every
, choosing
sufficiently close to
, it follows from the inequality
,
, that trajectories of (
4) starting sufficiently close to
are bounded, and hence, the positive limit set of (
4) is nonempty. Since
as
, it follows that the positive limit set is contained in
as
.
Now, since every point in
is Lyapunov stable in probability with respect to
, it follows from Proposition 2 that
as
, where
is Lyapunov stable in probability with respect to
. If
, then it follows using similar arguments as above that there exists a class
function
such that
for every
satisfying
and
. Hence,
Next, consider the case where
and let
be a class
function. In this case, note that
and hence, it follows using similar arguments as above that there exists a class
function
such that
Now, note that
is of class
(by [
48]), Lemma 4.2), and hence, (iii) follows immediately.
Finally, to show that (iii) implies (i), suppose (iii) holds and let
. Then it follows that for every
,
that is,
, where
and
is of class
(by [
48], Lemma 4.2). It now follows from (i) of Lemma 1 that
is Lyapunov stable in probability with respect to
. Since
was chosen arbitrarily, it follows that every equilibrium point is Lyapunov stable in probability with respect to
. Furthermore,
.
Choosing
sufficiently close to
, it follows from the inequality
that trajectories of (
4) are almost surely bounded as
, and hence, the positive limit set of (
4) is nonempty as
. Since every point in
is Lyapunov stable in probability with respect to
, it follows from Proposition 2 that
as
, where
is Lyapunov stable in probability with respect to
. Hence, by Definition 8, (
4) is stochastically semistable with respect to
. ☐
Next, we develop necessary and sufficient conditions for stochastic semistability. First, we present sufficient conditions for stochastic semistability. The following theorems generalize Theorems 3.1 and 3.2 of [
37].
Theorem 3. Consider the nonlinear stochastic nonnegative dynamical system (4). Let be a relatively open neighborhood of and assume that there exists a two-times continuously differentiable function such thatIf every equilibrium point of (4) is Lyapunov stable in probability with respect to , then (4) is stochastically semistable with respect to . Moreover, if and as , then (4) is globally stochastically semistable with respect to . Proof. Since every equilibrium point of (
4) is Lyapunov stable in probability with respect to
by assumption, for every
, there exists a relatively open neighborhood
of
z such that
,
, is bounded and contained in
as
. The set
,
, is a relatively open neighborhood of
contained in
. Consider
so that there exists
such that
and
,
, as
. Since
is bounded and invariant with respect to the solution of (
4) as
, it follows that
is invariant with respect to the solution of (
4) as
. Furthermore, it follows from (
52) that
,
, and hence, since
is bounded it follows from Theorem 2 that
as
.
It is easy to see that
by assumption and
,
. Therefore,
as
and
, which implies that
. Finally, since every point in
is Lyapunov stable in probability with respect to
, it follows from Proposition 2 that
as
, where
is Lyapunov stable in probability with respect to
. Hence, by Definition 8, (
4) is semistable. For
global stochastic semistability with respect to
follows from identical arguments using the radially unbounded condition on
. ☐
Next, we present a slightly more general theorem for stochastic semistability wherein we do not assume that all points in are Lyapunov stable in probability with respect to but rather we assume that all points in are Lyapunov stable in probability with respect to for some continuous function .
Theorem 4. Consider the nonlinear stochastic nonnegative dynamical system (4) and let be a relatively open neighborhood of . Assume that there exist a two-times continuously differentiable function and a continuous function such thatIf every point in the set ≜
is Lyapunov stable in probability with respect to , then (4) is stochastically semistable with respect to . Moreover, if and as , then (4) is globally stochastically semistable with respect to . Proof. Since, by assumption, (
4) is Lyapunov stable in probability with respect to
for all
, there exists a relatively open neighborhood
of
z such that
,
, is bounded and contained in
as
. The set
is a relatively open neighborhood of
contained in
. Consider
so that there exists
such that
and
,
, as
. Since
is bounded it follows that
is invariant with respect to the solution of (
4) as
. Furthermore, it follows from (
53) that
,
, and hence, since
is bounded and invariant with respect to the solution of (
4) as
, it follows from Theorem 2 that
as
. Therefore,
as
and
, which implies that
.
Finally, since every point in
is Lyapunov stable in probability with respect to
, it follows from Proposition 2 that
as
, where
is Lyapunov stable in probability with respect to
. Hence, by definition, (
4) is semistable. For
global stochastic semistability with respect to
follows from identical arguments using the radially unbounded condition on
. ☐
Example 1. Consider the nonlinear stochastic nonnegative dynamical system on given by ([37])where , , , are Lipschitz continuous and . Equations (
54)
and (55)
represent the collective dynamics of two subsystems which interact by exchanging energy. The energy states of the subsystems are described by the scalar random variables and . The unity coefficients scaling , , , appearing in (
54)
and (55)
represent the topology of the energy exchange between the subsystems. More specifically, given , , a coefficient of 1 denotes that subsystem j receives energy from subsystem i, and a coefficient of zero denotes that subsystem i and j are disconnected, and hence, cannot exchange energies. The connectivity between the subsystems can be represented by a graph having two nodes such that has a directed edge from node i to node j if and only if subsystem j can receive energy from subsystem i. Since the coefficients scaling , , , are constants, the graph topology is fixed. Furthermore, note that the directed graph is weakly connected since the underlying undirected graph is connected; that is, every subsystem receives energy from, or delivers energy to, at least one other subsystem.
Note that (
54)
and (55)
can be cast in the form of (
4)
withwhere the stochastic term represents probabilistic variations in the energy transfer between the two subsystems. Furthermore, note that sincewhere , it follows that , which implies that the total system energy is conserved. In this example, we use Theorem 3 to analyze the collective behavior of (
54)
and (55).
Specifically, we are interested in the energy equipartitioning behavior of the subsystems. For this purpose, we make the assumptions if and only if , , and for . The first assumption implies that if the energies in the connected subsystems i and j are equal, then energy exchange between the subsystems is not possible. This statement is reminiscent of the zeroth law of thermodynamics, which postulates that temperature equality is a necessary and sufficient condition for thermal equilibrium. The second assumption implies that energy flows from more energetic subsystems to less energetic subsystems and is reminiscent of the second law of thermodynamics, which states that heat (energy) must flow in the direction of lower temperatures. It is important to note here that due to the stochastic term capturing probabilistic variations in the energy transfer between the subsystems, the second assumption requires that the scaled net energy flow is bounded by the negative intensity of the diffusion coefficient given by .
To show that (54) and (55) is stochastically semistable with respect to , note that and consider the Lyapunov function candidate , where . Now, it follows thatwhich implies that is Lyapunov stable in probability with respect to . Next, it is easy to see that when , and hence, , . Therefore, it follows from Theorem 3 that is stochastically semistable with respect to for all . Furthermore, note that , , impliesNote that an identical assertion holds for the collective dynamics of n subsystems with a connected undirected energy graph topology. △
Finally, we extend Theorem 3.3 of [
37] to provide a converse Lyapunov theorem for stochastic semistability. For this result, recall that
for every
. Also note that it follows from (
9) that
.
Theorem 5. Consider the nonlinear stochastic nonnegative dynamical system (4). Suppose (4) is stochastically semistable with a ρ-domain of semistability . Then there exist a continuous nonnegative function and a class function such that (i) , , () , , and () , . Proof. Let
denote the set of all sample trajectories of (
4) for which
and
,
, and let
,
, denote the indicator function defined on the set
, that is,
Note that by definition
for all
. Define the function
by
and note that
is well defined since (
4) is stochastically semistable with respect to
. Clearly, (i) holds. Furthermore, since
,
, it follows that (ii) holds with
.
To show that
is continuous on
, define
by
, and denote
Note that
is open and contains an open neighborhood of
. Consider
and define
. Then it follows from stochastic semistability of (
4) that there exists
such that
. Consequently,
for all
, and hence, it follows that
is well defined. Since
is open, there exists a neighborhood
such that
. Hence,
is a neighborhood of
z such that
.
Next, choose
such that
and
. Then, for every
and
,
Therefore, for every
,
Hence,
Now, since
and
satisfy (
6) and (
7), it follows from continuous dependence of solutions
on system initial conditions ([
32], Theorem 7.3.1) and (
60) that
is continuous on
.
To show that
is continuous on
, consider
. Let
be a sequence in
that converges to
. Since
is Lyapunov stable in probability with respect to
, it follows that
is the unique solution to (
4) with
. By continuous dependence of solutions
on system initial conditions ([
32], Theorem 7.3.1),
as
,
.
Let
and note that it follows from (ii) of Proposition 3 that there exists
such that for every solution of (
4) in
there exists
such that
for all
. Next, note that there exists a positive integer
such that
for all
. Now, it follows from (
57) that
Next, it follows from ([
32], Theorem 7.3.1) that
converges to
uniformly on
. Hence,
which implies that there exists a positive integer
such that
for all
. Combining (
62) with the above result yields
for all
, which implies that
.
Finally, we show that
is negative along the solution of (
4) on
. Note that for every
and
such that
, it follows from the definition of
that
is reached at some time
such that
. Hence, it follows from the law of iterated expectation that
which implies that
and hence, (iii) holds. ☐
5. Conservation of Energy and the First Law of Thermodynamics: A Stochastic Perspective
In this section, we extend the thermodynamic model proposed in [
30] to include probabilistic variations in the instantaneous rate of energy dissipation as well as probabilistic variations in the energy transfer between the subsystems. Even though the treatment in this and the next two sections closely parallels that of [
30] for deterministic thermodynamics, the thermodynamic models and proofs of our results are rendered more difficult due to the inclusion of stochastic disturbances. To formulate our state space stochastic thermodynamic model, we consider the large-scale stochastic dynamical system
shown in
Figure 1 involving energy exchange between
q interconnected subsystems and use the notation developed in [
30].
Specifically, denotes the energy (and hence a nonnegative quantity) of the i-th subsystem, denotes the external power (heat flux) supplied to (or extracted from) the i-th subsystem, , , denotes the instantaneous rate of energy (heat) flow from the j-th subsystem to the i-th subsystem, , , , denotes the instantaneous rate of energy (heat) received or delivered to the i-th subsystem from all other subsystems due to the stochastic disturbance , , denotes the instantaneous rate of energy (heat) dissipation from the i-th subsystem to the environment, and , denotes the instantaneous rate of energy (heat) dissipation from the i-th subsystem to the environment due to the stochastic disturbance . Here we assume that , , , , and , are locally Lipschitz continuous on and satisfy a linear growth condition, and , are bounded piecewise continuous functions of time.
An
energy balance for the
i-th subsystem yields
or, equivalently, in vector form,
where
,
and
are, respectively, a
-dimensional and
-dimensional independent standard Wiener process (i.e., Brownian motion) defined on a complete filtered probability space
,
is independent of
, and
,
Here, the stochastic disturbance
in (
66) captures probabilistic variations in the energy transfer rates between compartments and the stochastic disturbance
captures probabilistic variations in the instantaneous rate of energy dissipation.
Equivalently, (
65) can be rewritten as
or, in vector form,
where
, yielding a
differential energy balance equation that characterizes energy flow between subsystems of the large-scale stochastic dynamical system
. Here we assume that
satisfies sufficient regularity conditions such that (
68) has a unique solution forward in time. Specifically, we assume that the external power (heat flux)
supplied to the large-scale stochastic dynamical system
consists of measurable functions
adapted to the filtration
such that
,
, for all
,
is independent of
,
,
, and
, where
, and hence,
is non-anticipative. Furthermore, we assume that
takes values in a compact metrizable set. In this case, it follows from Theorem 2.2.4 of [
53] that there exists a path-wise unique solution to (
68) in
.
Equation (
66) or, equivalently, (
68) is a statement of the
first law for stochastic thermodynamics as applied to
isochoric transformations (i.e., constant subsystem volume transformations) for each of the subsystems
. To see this, let the total energy in the large-scale stochastic dynamical system
be given by
, where
and
, and let the net energy received by the large-scale dynamical system
over the time interval
be given by
where
, is the solution to (
68). Then, premultiplying (
66) by
and using the fact that
and
, it follows that
where
denotes the variation in the total energy of the large-scale stochastic dynamical system
over the time interval
.
For our large-scale stochastic dynamical system model , we assume that , , , , and , , whenever . In this case, , is essentially nonnegative. The above constraint implies that if the energy of the j-th subsystem of is zero, then this subsystem cannot supply any energy to its surroundings nor dissipate energy to the environment. Moreover, we assume that whenever , , , which implies that when the energy of the i-th subsystem is zero, then no energy can be extracted from this subsystem.
The following proposition is needed for the main results of this paper.
Proposition 4. Consider the large-scale stochastic dynamical system with differential energy balance equation given by (68). Suppose , , , , and , , whenever , , and whenever , , . Then the solution , , to (68) is nonnegative for all nonnegative initial conditions . Proof. First note that , is essentially nonnegative, , , and , , whenever , . Next, since whenever , , , it follows that for all and whenever and for all and . This implies that for all nonnegative initial conditions , every sample trajectory of is directed towards the interior of the nonnegative orthant whenever , and hence, remains nonnegative almost surely for all . ☐
Next, premultiplying (
66) by
, using Proposition 4, and using the fact that
and
, it follows that
Now, for the large-scale stochastic dynamical system
, define the input
and the output
. Hence, it follows from (
71) that for any two
-stopping times
and
such that
almost surely,
Thus, the large-scale stochastic dynamical system
is
stochastically lossless [
54] with respect to the
energy supply rate and with the
energy storage function . In other words, the difference between the supplied system energy and the stored system energy is a martingale with respect to the differential energy balance system filtration.
The following lemma is required for our next result.
Lemma 2. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68). Then, for every equilibrium state and every and , there exist , , and such that, for every with , there exists such that , , and , . Proof. Note that with
, the state
is an equilibrium state of (
68). Let
and
, and define
Note that for every
,
,
, and
, and for every
,
,
, and
. Moreover, it follows from Lévy’s modulus of continuity theorem [
55] that for sufficiently small
,
and
, where
.
Next, let
and
be given and, for sufficiently small
, let
be such that
(The existence of such an
is guaranteed since
,
, and
as
.) Now, let
be such that
. With
and
it follows that
is a solution to (
68).
The result is now immediate by noting that
and
and hence,
which proves the result. ☐
It follows from Lemma 2 that the large-scale stochastic dynamical system
with the differential energy balance Equation (
68) is
stochastically reachable from and
stochastically controllable to the origin in
. Recall from [
54] that the large-scale stochastic dynamical system
with the differential energy balance Equation (
68) is stochastically reachable from the origin in
if, for all
and
, there exist a finite random variable
, called the
first hitting time, defined by
and a
-adapted square integrable input
defined on
such that the state
,
, can be driven from
to
and
, where
and the supremum is taken pointwise. Alternatively,
is stochastically controllable to the origin in
if, for all
,
, there exists a finite random variable
defined by
and a
-adapted square integrable input
defined on
such that the state
, can be driven from
to
and
with a pointwise supremum.
We let denote the set of measurable bounded -valued stochastic processes on the semi-infinite interval consisting of power inputs (heat fluxes) to the large-scale stochastic dynamical system such that for every the system energy state can be driven from to by . Furthermore, we let denote the set of measurable bounded -valued stochastic processes on the semi-infinite interval consisting of power inputs (heat fluxes) to the large-scale stochastic dynamical system such that the system energy state can be driven from , to by . Finally, let be an input space that is a subset of measurable bounded -valued stochastic processes on . The spaces , , and are assumed to be closed under the shift operator, that is, if (respectively, or ), then the function defined by is contained in (respectively, or ) for all .
The next result establishes the uniqueness of the internal energy function
, for our large-scale stochastic dynamical system
. For this result define the
available energy of the large-scale stochastic dynamical system
by
where
,
, is the solution to (
68) with
and admissible inputs
. The infimum in (
79) is taken over all
-measurable inputs
, all finite
-stopping times
, and all system sample paths with initial value
and terminal value left free. Furthermore, define the
required energy supply of the large-scale stochastic dynamical system
by
The infimum in (
80) is taken over all system sample paths starting from
and ending at
at time
, and all times
.
Note that the available energy is the maximum amount of stored energy (net heat) that can be extracted from the large-scale stochastic dynamical system at any finite stopping time , and the required energy supply is the minimum amount of energy (net heat) that can be delivered to the large-scale stochastic dynamical system such that, for all , .
Theorem 6. Consider the large-scale stochastic dynamical system with differential energy balance equation given by (68). Then is stochastically lossless with respect to the energy supply rate , where and , and with the unique energy storage function corresponding to the total energy of the system given bywhere , , is the solution to (68) with admissible input , , and . Furthermore, Proof. Note that it follows from (
71) that
is stochastically lossless with respect to the energy supply rate
and with the energy storage function
. Since, by Lemma 2,
is reachable from and controllable to the origin in
, it follows from (
71), with
and
for some
and
, that
Alternatively, it follows from (
71), with
for some
and
, that
Thus, (
83) and (
84) imply that (
81) is satisfied and
Conversely, it follows from (
71) and the fact that
, that, for all
and
,
which implies that
Furthermore, it follows from the definition of
that
, since the infimum in (
79) is taken over the set of values containing the zero value (
).
Next, note that it follows from (
71), with
and
,
, for all
and
, that
Moreover, since the system
is reachable from the origin, it follows that for every
, there exists
and
such that
is finite, and hence,
. Finally, combining (
85), (
87), and (
88), it follows that (
82) holds. ☐
It follows from (
82) and the definitions of available energy
and the required energy supply
,
, that the large-scale stochastic dynamical system
can deliver to its surroundings all of its stored subsystem energies and can store all of the work done to all of its subsystems. This is in essence a statement of the first law of stochastic thermodynamics and places no limitation on the possibility of transforming heat into work or work into heat. In the case where
, it follows from (
71) and the fact that
, that the zero solution
of the large-scale stochastic dynamical system
with the differential energy balance Equation (
68) is Lyapunov stable in probability with respect to
with Lyapunov function
corresponding to the total energy in the system.
6. Entropy and the Second Law of Thermodynamics
As for the deterministic dynamical thermodynamic model presented in [
30], the nonlinear differential energy balance Equation (
68) can exhibit a full range of nonlinear behavior, including bifurcations, limit cycles, and even chaos. However, a thermodynamically consistent energy flow model should ensure that the evolution of the system energy is diffusive in character with convergent subsystem energies. As established in [
30], such a system model would guarantee the absence of the Poincaré recurrence phenomenon [
56]. To ensure a thermodynamically consistent energy flow model, we require the following axioms [
57]. For the statement of these axioms, we first recall the following graph-theoretic notions.
Definition 10 ([
58]).
A directed graph
associated with the connectivity matrix
has vertices
and an arc
from vertex i to vertex j, , if and only if . A graph
associated with the connectivity matrix is a directed graph for which the arc set
is symmetric, that is, . We say that is strongly connected
if for any ordered pair of vertices , , there exists a path
(i.e., a sequence of arcs) leading from i to j. Recall that the connectivity matrix
is irreducible, that is, there does not exist a permutation matrix such that
is cogredient to a lower-block triangular matrix, if and only if
is strongly connected (see Theorem 2.7 of [
58]). Let
, denote the net energy flow from the
j-th subsystem
to the
i-th subsystem
of the large-scale stochastic dynamical system
.
Axiom (i): For the connectivity matrix
associated with the large-scale stochastic dynamical system
defined by
and
rank
, and for
,
,
if and only if
.
Axiom (ii): For
,
,
, and, for all
,
As discussed in [
30] for the deterministic thermodynamic problem, the fact that
if and only if
, implies that subsystems
and
of
are
connected; alternatively,
implies that
and
are
disconnected. Axiom (i) implies that if the energies in the connected subsystems
and
are equal, then energy exchange between these subsystems is not possible. This statement is consistent with the
zeroth law of thermodynamics, which postulates that temperature equality is a necessary and sufficient condition for thermal equilibrium. Furthermore, it follows from the fact that
and rank
that the connectivity matrix
is irreducible, which implies that for any pair of subsystems
and
,
, of
there exists a sequence of connectors (arcs) of
that connect
and
.
Axiom (ii) implies that energy flows from more energetic subsystems to less energetic subsystems and is consistent with the
second law of thermodynamics, which states that heat (energy) must flow in the direction of lower temperatures [
59]. Furthermore, note that
,
, which implies conservation of energy between lossless subsystems. With
and
, Axioms (i) and (ii) along with the fact that
,
, imply that at a given instant of time, energy can only be transported, stored, or dissipated but not created, and the maximum amount of energy that can be transported and/or dissipated from a subsystem cannot exceed the energy in the subsystem. Finally, it is important to note here that due to the stochastic disturbance term
capturing probabilistic variations in heat transfer between the subsystems, Axiom (ii) requires that the scaled net energy flow between the subsystems is bounded by the negative intensity of the system diffusion.
Next, we show that the classical Clausius equality and inequality for reversible and irreversible thermodynamics over cyclic motions are satisfied for our stochastic thermodynamically consistent energy flow model. For this result ∮ denotes a cyclic integral evaluated along an arbitrary closed path of (
68) in
; that is,
with
and
such that
.
Proposition 5. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and assume that Axioms (i) and (ii) hold. Then, for all , , and such that ,where , , , is the amount of net energy (heat) received by the i-th subsystem over the infinitesimal time interval , and , , is the solution to (68) with initial condition . Furthermore,if and only if there exists a continuous function such that , . Proof. Since, by Proposition 4,
, and
,
, it follows from (
68), Ito’s lemma, and Axiom (ii) that, for all
,
which proves (
92).
To show (
93), note that it follows from (
94), Axiom (i), and Axiom (ii) that (
93) holds if and only if
,
, or, equivalently, there exists a continuous function
such that
. ☐
Inequality (
92) is a generalization of Clausius’ inequality for reversible and irreversible thermodynamics as applied to large-scale stochastic dynamical systems and restricts the manner in which the system dissipates (scaled) heat over cyclic motions. Note that the Clausius inequality (
92) for the stochastic thermodynamic model is stronger than the Clausius inequality for the deterministic model presented in [
30].
It follows from Axiom (i) and (
68) that for the
adiabatically isolated large-scale stochastic dynamical system
(that is,
and
), the energy states given by
, correspond to the equilibrium energy states of
. Thus, as in classical thermodynamics, we can define an equilibrium process as a process in which the trajectory of the large-scale stochastic dynamical system
moves along the equilibrium manifold
corresponding to the set of equilibria of the isolated [
60] system
. The power input that can generate such a trajectory can be given by
, where
is such that
. Our definition of an equilibrium transformation involves a continuous succession of intermediate states that differ by infinitesimals from equilibrium system states and thus can only connect initial and final states, which are states of equilibrium. This process need not be slowly varying, and hence, equilibrium and quasistatic processes are not synonymous in this paper. Alternatively, a
nonequilibrium process is a process that does not lie on the equilibrium manifold
. Hence, it follows from Axiom (i) that for an equilibrium process
,
, and thus, by Proposition 5, inequality (
92) is satisfied as an equality. Alternatively, for a nonequilibrium process it follows from Axioms (i) and (ii) that (
92) is satisfied as a strict inequality.
Next, we give a stochastic definition of entropy for the large-scale stochastic dynamical system that is consistent with the classical thermodynamic definition of entropy.
Definition 11. For the large-scale stochastic dynamical system with differential energy balance Equation (68), a function satisfyingfor every -stopping times and is called the entropy
function of . Note that it follows from Definition 11 that the difference between the system entropy production and the stored system entropy is a submartingale with respect to the differential energy balance filtration.
Next, we show that (
92) guarantees the existence of an entropy function for
. For this result define the
available entropy of the large-scale stochastic dynamical system
by
where
and
, and define the
required entropy supply of the large-scale stochastic dynamical system
by
where
. Note that the available entropy
is the minimum amount of scaled heat (entropy) that can be extracted from the large-scale stochastic dynamical system
in order to transfer it from an initial state
to
. Alternatively, the required entropy supply
is the maximum amount of scaled heat (entropy) that can be delivered to
to transfer it from the origin to a given subset in the state space containing the initial state
over a finite stopping time. For further details, see [
54].
Theorem 7. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and assume that Axiom holds. Then there exists an entropy function for . Moreover, , , and , , are possible entropy functions for with . Finally, all entropy functions , , for satisfy Proof. Since, by Lemma 2,
is stochastically controllable to and stochastically reachable from the origin in
, it follows from (
96) and (
97) that
, and
, respectively. Next, let
, and let
be such that
and
, where
. In this case, it follows from (
92) that, for all
,
Next, using the strong Markov property we have
and hence, (
99) implies
Now, taking the supremum on both sides of (
101) over all
and
yields
Next, taking the infimum on both sides of (
102) over all
and
, we obtain
, which implies that
. Hence, the functions
and
are well defined.
Next, it follows from the definition of
, the law of iterated expectation, and the strong Markov property that for every stopping time
and
such that
and
,
which implies that
, satisfies (
95). Thus,
, is a possible entropy function for
. Note that with
it follows from (
92) that the supremum in (
96) is taken over the set of negative semidefinite values with one of the values being zero for
. Thus,
.
Similarly, it follows from the definition of
that for every stopping time
and
such that
and
,
which implies that
, satisfies (
95). Thus,
, is a possible entropy function for
. Note that with
it follows from (
92) that the supremum in (
97) is taken over the set of negative semidefinite values with one of the values being zero for
. Thus,
.
Next, suppose there exists an entropy function
for
, and let
in (
95). Then it follows from (
95) that
for all
and
, which implies that
Since
is arbitrary, it follows that
.
Alternatively, let
in (
95). Then it follows from (
95) that
for all
and
. Hence,
which, since
is arbitrary, implies that
. Thus, all entropy functions for
satisfy (
98). ☐
It is important to note that inequality (
92) is equivalent to the existence of an entropy function for
. Sufficiency is simply a statement of Theorem 7, while necessity follows from (
95) with
. This definition of entropy leads to the second law of stochastic thermodynamics being viewed as an axiom in the context of stochastic (anti)cyclo-dissipative dynamical systems [
54].
The next result shows that all entropy functions for are continuous on .
Theorem 8. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and let be an entropy function of . Then is continuous on . Proof. Let
and
be such that
. Note that with
,
is an equilibrium point of the differential energy balance Equation (
68). Next, it follows from Lemma 2 that
is locally stochastically controllable, that is, for every
and
, the set of points that can be reached from and to
in time
T using admissible inputs
, satisfying
, contains a neighborhood of
.
Next, let and note that it follows from the continuity of , , , and that there exist and such that for every and , , , where and , denotes the solution to (68) with the initial condition . Furthermore, it follows from the local controllability of that for every , there exists a strictly increasing, continuous function such that , and for every such that , there exists and an input such that , , and . Hence, there exists such that for every such that , there exists and an input such that , and . In addition, it follows from Lemma 2 that is such that .
Next, since
,
, is continuous, it follows that there exists
such that
Hence, it follows that
Now, if
is an entropy function of
, then
or, equivalently,
If
, then combining (
110) and (
112) yields
Alternatively, if
, then (
113) can be derived by reversing the roles of
and
. Specifically, for
and
, (
113) becomes
Hence, since
is continuous and
is arbitrary, it follows that
is continuous on
. ☐
Next, as a direct consequence of Theorem 7, we show that all possible entropy functions of form a convex set, and hence, there exists a continuum of possible entropy functions for ranging from the required entropy supply to the available entropy .
Proposition 6. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and assume that Axioms and hold. Thenis an entropy function for . Proof. The result is a direct consequence of the reachability of
along with inequality (
95) by noting that if
and
satisfy (
95), then
satisfies (
95). ☐
It follows from Proposition 6 that Definition 11 does not provide enough information to define the entropy uniquely for nonequilibrium thermodynamic systems with differential energy balance Equation (
68). This difficulty has long been pointed out in [
61]. Two particular entropy functions for
can be computed a priori via the variational problems given by (
96) and (
97). For equilibrium thermodynamics, however, uniqueness is not an issue, as shown in the next proposition.
Proposition 7. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and assume that Axioms and hold. Then at every equilibrium state of the isolated system , the entropy , of is unique (modulo a constant of integration) and is given bywhere and denotes the vector natural logarithm given by . Proof. It follows from Axiom (i) and Axiom (ii) that for an equilibrium process
,
, and
. Consider the entropy function
given by (
96), and let
for some equilibrium state
. Then it follows from (
68) that
Since the solution
, to (
68) is nonnegative for all nonnegative initial conditions, it follows from Axiom (ii) that the infimum in (
116) is taken over the set of nonnegative values. However, the zero value of the infimum is achieved on an equilibrium process for which
,
,
. Thus,
Similarly, consider the entropy function
given by (
97). Then, it follows from (
68) that, for
,
Now, it follows from Axioms (i) and (ii) that the zero value of the supremum in (
118) is achieved on an equilibrium process and thus
Finally, it follows from (
98) that (
115) holds. ☐
The next proposition shows that if (
95) holds as an equality for some transformation starting and ending at an equilibrium point of the isolated dynamical system
, then this transformation must lie on the equilibrium manifold
.
Proposition 8. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and assume that Axioms ( and ( hold. Let denote an entropy of , and let denote the solution to (68) with and , where , . Thenif and only if there exists a continuous function such that , , and , . Proof. Since
and
are equilibrium states of the isolated dynamical system
, it follows from Proposition 7 that
Furthermore, it follows from (
68) that
Now, it follows from Axioms (i) and (ii) that (
118) holds if and only if
,
,
, or, equivalently, there exists a continuous function
such that
,
,
, and
. ☐
Even though it follows from Proposition 6 that Definition 11 does not provide a unique continuous entropy function for nonequilibrium systems, the next theorem gives a
unique,
two-times continuously differentiable entropy function for
for equilibrium and nonequilibrium processes. This result answers the long-standing question of how the entropy of a nonequilibrium state of a dynamical process should be defined [
61,
62], and establishes its global existence and uniqueness.
Theorem 9. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68), and assume that Axioms and hold. Then the function given bywhere , is a unique (modulo a constant of integration), two-times continuously differentiable entropy function of . Furthermore, for , , where , , denotes the solution to (68) and , (123) satisfiesfor every and . Proof. Since, by Proposition 1,
, and
,
, it follows that
Furthermore, in the case where
, it follows from Axiom (i), Axiom (ii), and (
125) that (
124) holds.
To show that (
123) is a unique, two-times continuously differentiable entropy function of
, let
be a two-times continuously differentiable entropy function of
so that
satisfies (
95) or, equivalently,
where
and
,
, denotes the solution to the differential energy balance Equation (
68), and
denotes the infinitesimal generator of
along the solution
. Hence, it follows from (
126) that
which implies that there exist continuous functions
and
such that
Now, equating coefficients of equal powers (of
S and
D), it follows that
,
,
, and
Hence,
, and
Thus, (
123) is a unique, two-times continuously differentiable entropy function for
. ☐
Note that it follows from Axiom (i), Axiom (ii), and the last equality in (
125) that the entropy function given by (
123) satisfies (
95) as an equality for an equilibrium process and as a strict inequality for a nonequilibrium process. For any entropy function of
, it follows from Proposition 8 that if (
95) holds as an equality for some transformation starting and ending at equilibrium points of the isolated system
, then this transformation must lie on the equilibrium manifold
. However, (
95) may hold as an equality for nonequilibrium processes starting and ending at nonequilibrium states.
The entropy expression given by (
123) is identical in form to the Boltzmann entropy for statistical thermodynamics. Due to the fact that the entropy given by (
123) is indeterminate to the extent of an additive constant, we can place the constant of integration
to zero by taking
. Since
given by (
123) achieves a maximum when all the subsystem energies
, are equal, the entropy of
can be thought of as a measure of the tendency of a system to lose the ability to do useful work, lose order, and settle to a more homogenous state. For further details see [
30].
Recalling that
, is the infinitesimal amount of the net heat received or dissipated by the
i-th subsystem of
over the infinitesimal time interval
, it follows from (
95) that
Inequality (
131) is analogous to the classical thermodynamic inequality for the variation of entropy during an infinitesimal irreversible transformation with the shifted subsystem energies
playing the role of the
i-th subsystem thermodynamic (absolute) temperatures. Specifically, note that since
, where
denotes the unique continuously differentiable
i-th subsystem entropy, it follows that
, defines the reciprocal of the subsystem thermodynamic temperatures. That is,
and
,
. Hence, in our formulation, temperature is a function derived from entropy and does not involve the primitive subjective notions of hotness and coldness.
It is important to note that in this paper we view subsystem temperatures to be synonymous with subsystem energies. Even though this does not limit the generality of our theory from a mathematical perspective, it can be physically limiting since it does not allow for the consideration of two subsystems of
having the same stored energy with one of the subsystems being at a higher temperature (i.e., hotter) than the other. This, however, can be easily addressed by assigning different specific heats (i.e., thermal capacities) for each of the compartments of the large-scale system
as shown in [
30].
7. Stochastic Semistability and Energy Equipartition
For the (adiabatically) isolated large-scale stochastic dynamical system
, (
95) yields the fundamental inequality
Inequality (
133) implies that, for any dynamical change in an adiabatically isolated large-scale stochastic dynamical system
, the entropy of the final state can never be less than the entropy of the initial state and is a generalization of Clausius’ version of the entropy principle, which states that for every irreversible (
nicht umkehrbar) process in an adiabatically isolated system beginning and ending at an
equilibrium state, the entropy of the final state is greater than or equal to the entropy of the initial state. Inequality (
133) is often identified with the second law of thermodynamics for stochastic systems and gives as a statement about entropy increase. It is important to stress that this result holds for an adiabatically isolated dynamical system. It is, however, possible with power (heat flux) supplied from an external system to reduce the entropy of the dynamical system
. The entropy of both systems taken together, however, cannot decrease.
As for the deterministic thermodynamic problem [
30], this observation implies that when the isolated large-scale dynamical system
with thermodynamically consistent energy flow characteristics (i.e., Axioms (i) and (ii) hold) is at a state of maximum entropy consistent with its energy, it cannot be subject to any further dynamical change since any such change would result in a decrease of entropy. This of course implies that the state of
maximum entropy is the stable state of an isolated system, and this equilibrium state has to be stochastically semistable. The following theorem generalizes Theorem 3.9 of [
30] to the stochastic setting.
Theorem 10. Consider the large-scale stochastic dynamical system with differential energy balance Equation (68) with , , and , and assume that Axioms and hold. Then, for every , is a stochastic semistable equilibrium state of (68). Furthermore, as and is a semistable equilibrium state. Finally, if for some , , , and if and only if [63], then the zero solution to (68) is a globally asymptotically stable in probability equilibrium state of (68). Proof. It follows from Axiom (i) and (ii) that
, is an equilibrium state of (
68). To show Lyapunov stability of the equilibrium state
, consider
as a Lyapunov function candidate. Note that for
,
,
Since, Axiom (ii) holds for all
, we have
Now, since
,
,
, and
, it follows from (
135) that
which establishes Lyapunov stability in probability of the equilibrium state
.
To show that
is stochastically semistable, let
. Now, by Axiom (i) and (ii) the directed graph associated with the connectivity matrix
for the large-scale dynamical system
is strongly connected, which implies that
. Since the
is an invariant set and
is radially unbounded, it follows from the Theorem 2 that for every initial condition
,
as
, and hence,
is a stochastic semistable equilibrium state of (
68). Next, note that since
and
as
, it follows that
as
. Hence, with
,
is a semistable equilibrium state of (
68).
To show that in the case where for some
,
, and
if and only if
, the zero solution
to (
68) is globally asymptotically stable in probability, consider
, as a candidate Lyapunov function. Note that
,
, and
is radially unbounded. Now, the infinitesimal generator of Lyapunov function along the system energy trajectories of (
68) is given by
which shows that the zero solution
to (
68) is Lyapunov stable in probability.
Finally, to show global asymptotic stability in probability of the zero equilibrium state, let
. Now, since Axiom
holds and
if and only if
, it follows that
. Hence, it follows from Theorem 2 that for every initial condition
,
as
, which proves global asymptotic stability in probability of the zero equilibrium state of (
68). ☐
Theorem 10 shows that the isolated (i.e., , , and ) large-scale stochastic dynamical system is stochastically semistable. In Theorem 10 we used the energy Lyapunov function to show that for the isolated (i.e., , , and ) large-scale stochastic dynamical system , as and is a stochastic semistable equilibrium state. This result can also be arrived at using the system entropy.
Specifically, using the system entropy given by (
123), we can show attraction of the system trajectories to stochastic Lyapunov stable equilibrium points
, and hence show stochastic semistability of these equilibrium states. To see this, note that since
and
, it follows that
. Hence,
. Furthermore, since
, it follows that
, which implies that all solutions to (
68) are almost surely bounded.
Next, since by (
125) the function
, is a supermartingale and
, is bounded, it follows from Theorem 2 that for every initial condition
,
as
, where
. It now follows from the last inequality of (
125) that
, which, since the directed graph associated with the connectivity matrix
for the large-scale dynamical system
is strongly connected, implies that
. Since the set
consists of the equilibrium states of (
68), it follows that
, which, along with (
136), establishes stochastic semistability of the equilibrium states
.
Theorem 10 implies that the steady-state value of the energy in each subsystem
of the isolated stochastic large-scale dynamical system
is equal, that is, the steady-state energy of the isolated large-scale stochastic dynamical system
given by
is uniformly distributed over all subsystems of
. This phenomenon is known as
equipartition of energy [
64,
65,
66,
67,
68] and is an emergent behavior in thermodynamic systems [
30].
Example 2. In this example, we apply Theorem 10 to the five-compartment thermodynamic system shown in Figure 2. Specifically, considerNote that (139)–(143) can be cast in the form of (68) with , , , , , It follows from Theorem 10 that the thermodynamic heat flow model (
139)–(143)
is stochastically semistable with respect to and achieves energy equipartition. To see this, let , , , , , and . Figure 3 shows the sample energy trajectories along with the standard deviation of the states of each thermodynamic compartment versus time for 10 sample paths. 
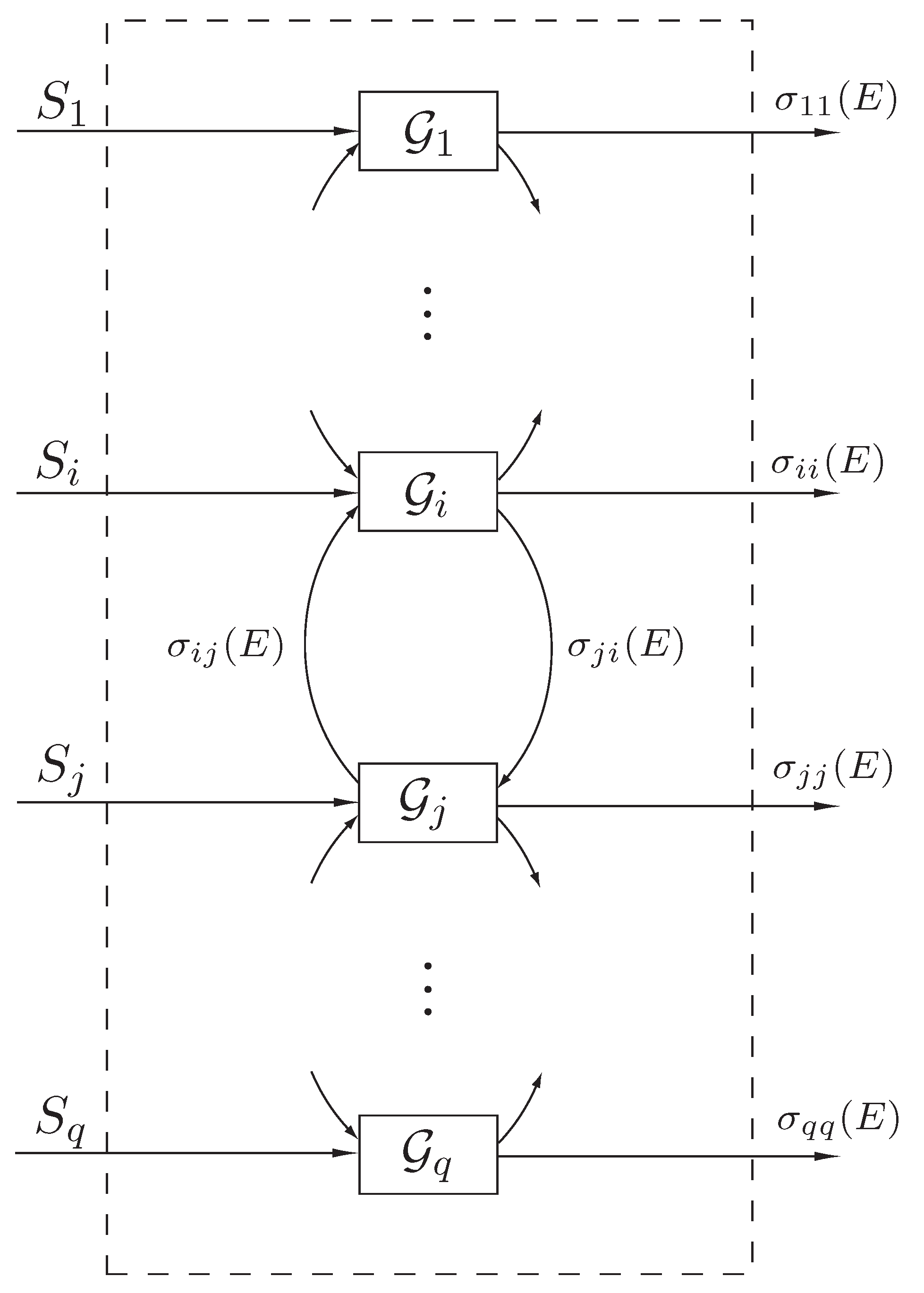{kind=link}
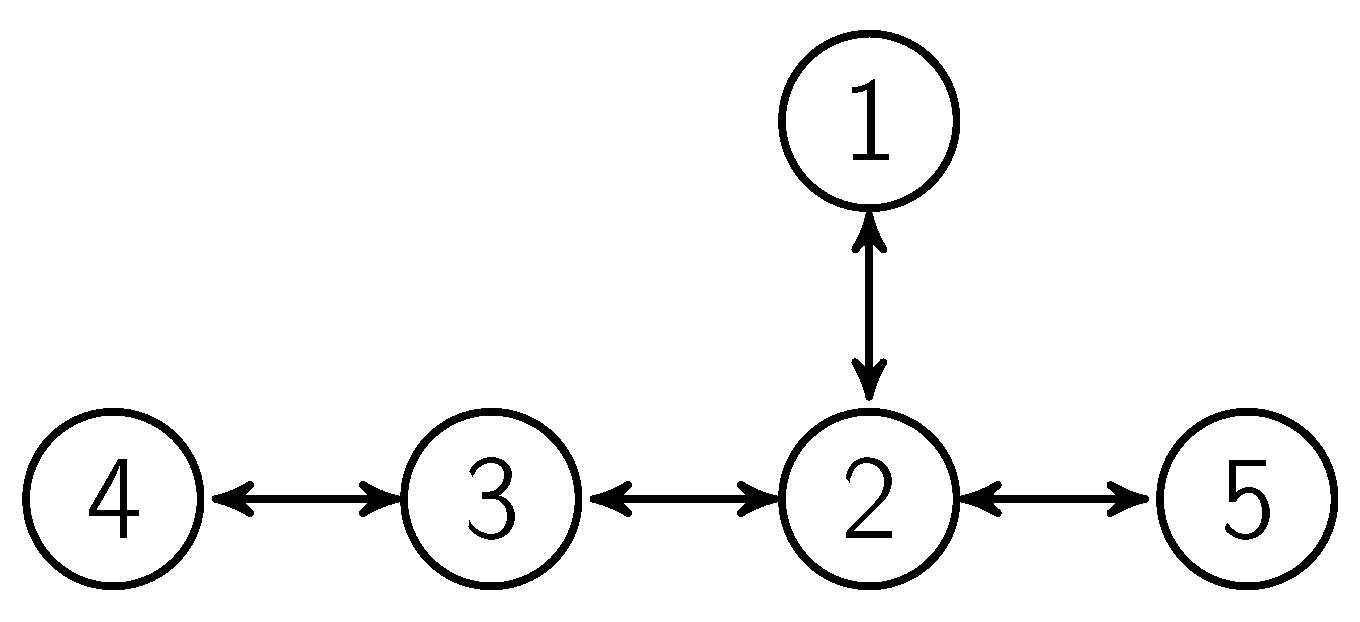{kind=link}
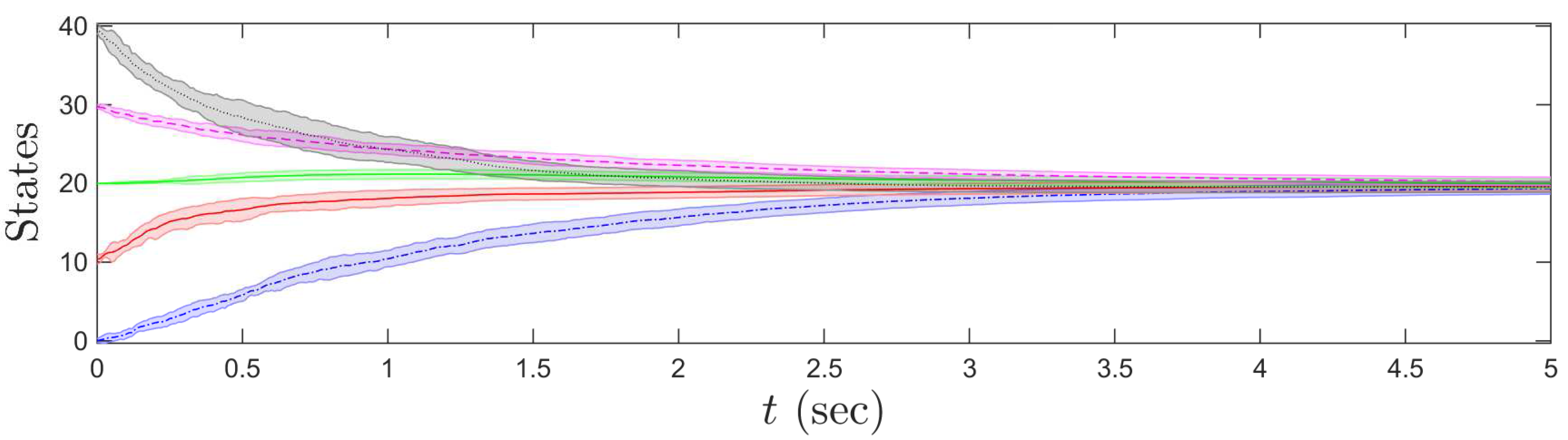{kind=link}


