2. Model
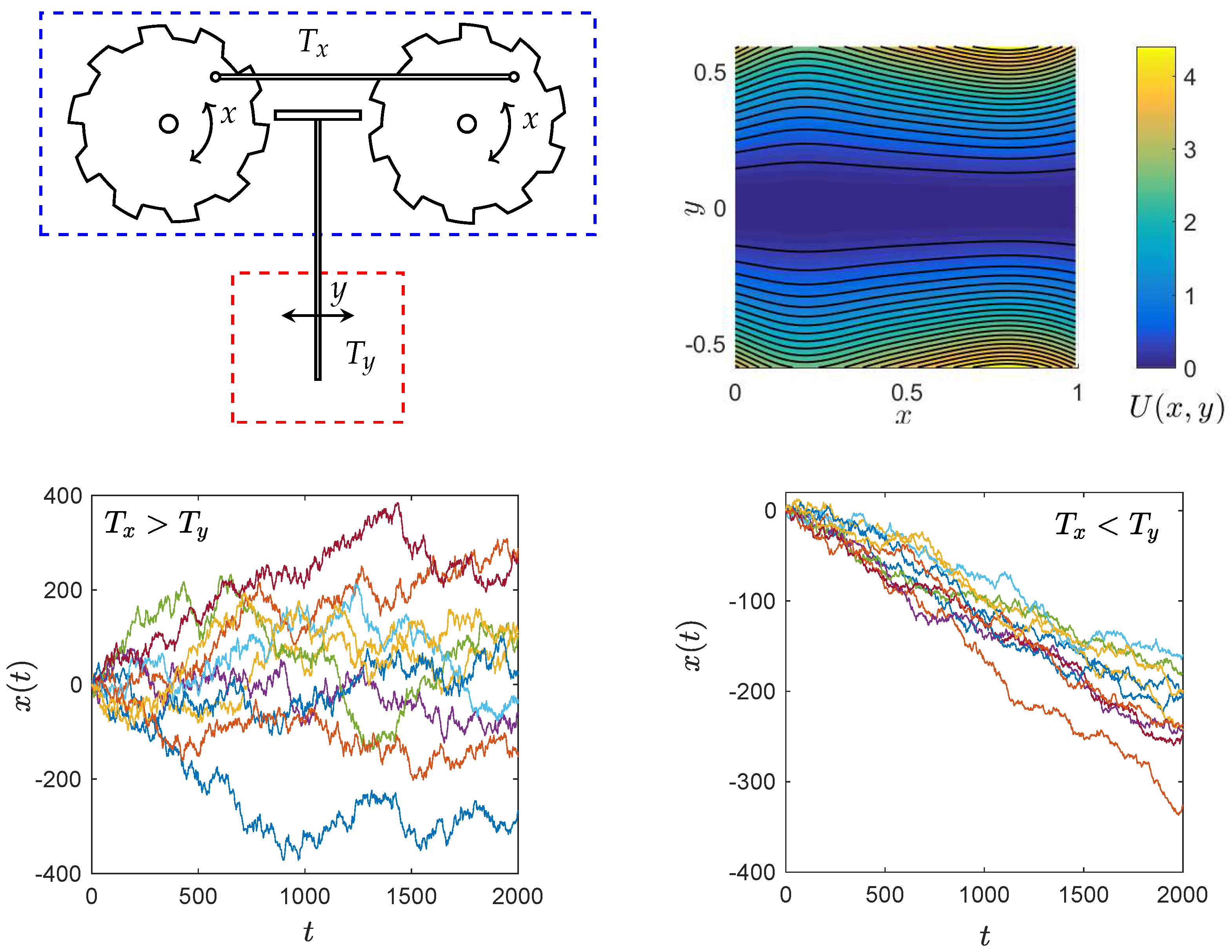
Our thought ratchet-and-pawl mechanism, which is nothing but an analogue of a famous Feynman–Smoluchowski ratchet, is illustrated in
Figure 1. We assume that ratchet wheels are synchronized (represented by a “stick” connecting the wheels) and immersed in a fluid at the temperature
. The wheels rotate randomly due to collisions with molecules of the surrounding fluid. Furthermore, a small pawl (the T-shaped part) is placed in between the wheels. In our model, it is not connected to a spring and it jiggles randomly between the wheels in the horizontal direction only. The random motion is caused by molecules of a fluid from the second reservoir (small rectangle) at the temperature
.
We model stochastic dynamics of the mechanical device by an overdamped diffusion (of course, one can use a more fundamental and less tractable underdamped description, which, however, is expected to yield qualitatively similar results in the long-time limit [
50,
71,
72]) of two coupled degrees of freedom denoted as
and
. The first,
, is the angle of rotation of the wheels (in units of
, thus
within one period). The second,
, represents position of the pawl between the teeth. The motion of the pawl is restricted to a narrow region between ratchet teeth. We describe the mutual repulsive interaction between teeth and pawl by the potential
For , the pawl is exactly in the middle of the wheels, the interaction potential is zero and wheels can rotate freely. When , the pawl is closer to the right wheel and interacts with it repulsively (similarly for ). The width of the region where the pawl can diffuse is controlled by the 1-periodic “spring constant” , the fraction is associated with the distance between the teeth for a given x.
The actual shape of the ratchet teeth is reflected in the functional form of
. In principle, three qualitatively different cases may occur. First, when
is an asymmetric function of
x, such as the frequently used function [
48]
This case corresponds to
asymmetric teeth as those illustrated in
Figure 1. We will show below that, for
, both the mean heat flow
through the system and the mean velocity
v are nonzero in this case. Second,
can be a symmetric function, like
, which corresponds to
symmetric teeth. In this second case, the device is not able to work as a heat engine: the mean velocity
v vanishes and only heat flow can be nonzero. The third case occurs if
is a constant. The latter situation corresponds to the wheels with no teeth. There, the pawl decouples from the wheels and each degree of freedom equilibrates in its own heat bath. In the following, we stick to the most interesting first case, where the device can act as a ratchet. For a further insight into a particular choice of the potential, we refer to the last paragraph of
Section 6.
Summing up the above description, we arrive at the Langevin equations for coordinates
,
,
where
stands for the delta-correlated Gaussian white noise with
, and
,
. Throughout the paper, we assume that the Boltzmann’s constant and the friction coefficients are equal to one. Numerical integration of these equations reveals the desired intriguing functionality of our device. When
, the wheels indeed rotate on average in one direction. A few generated trajectories of
are plotted in
Figure 1.
Equivalently, the Langevin Equation (
3) describes two-dimensional motion of a
single Brownian particle confined to a periodic channel. Potential within one period of the channel is plotted in the upper right panel of
Figure 1. The channel central line runs along the
x-direction at
. Thus, in the following, we refer to the motion along
x as to
longitudinal motion. In the
transversal direction
y, the potential increases without bounds and thus restricts the particle to diffuse along
x. Note that, in contrast to
entropic transport, our channel is “soft” since its walls are represented by the potential.
3. Solution of the Fokker–Planck Equation
Let us now summarize the main ideas behind the perturbative small-width solution of the two-dimensional Fokker–Planck equation corresponding to Langevin Equation (
3). Detailed exposition, including all steps of derivations, have been published in our recent mathematical work, [
45]. In the next sections, we exploit this solution to investigate dynamics and energetics of the model.
For narrow channels (
), the transversal dynamics are much faster than the longitudinal one because the ratio of the relaxation time for the transversal dynamics to the relaxation time for the longitudinal dynamics is of the order of
, and it decreases with decreasing channel width (
). The rescaling
of the coordinate
y helps to separate the fast transversal and the slow longitudinal dynamics in narrow channels. The Fokker–Planck equation corresponding to Equation (
3) then reads
with the longitudinal and transversal components of the probability current given by
respectively. In the long-time limit (steady-state), it is convenient to work with so called
reduced probability density and current defined as
The reduced current
has components
and
given in Equation (
6) but with the PDF
p replaced by the reduced PDF
P. Note that
is actually the transversal reduced probability current multiplied by
. In contrast to
p, the reduced PDF is periodic with the period of the potential, and it is normalized to unity in the potential unit cell,
See the review [
48] for more details.
In the long-time limit, the reduced PDF approaches its stationary form, which solves the stationary Fokker–Planck equation, i.e., Equation (
5) with
, subject to the normalization and periodicity conditions (
8). For a narrow channel, the stationary PDF and current can be represented by series in
,
where individual components of the current
are defined as in Equation (
6) with corresponding
insteady of
p. Inserting these expansions into the stationary (
) Fokker–Planck equation yields
Equation (
10) gives us differential equation for any
in terms of
, and thus they can, in principle, be solved recursively for any
n [
45].
The principal part of
P determining its global shape is given by
. It follows from Equation (
10) that
where we choose
such that
is normalized to one in the unit cell. Similarity of
with the Gibbs canonical distribution is not accidental. In the narrow channel, the Gibbs equilibrium with the transversal heat bath holds locally for any
x, which is a consequence of the separation of fast transversal and slow longitudinal degrees of freedom embodied in hierarchy (
10). The local width of the channel enters both the exponent and the
x-dependent pre-exponential factor. Note that any PDF in the form
satisfies the first of Equation (
10). The pre-exponential factor
is obtained from a second-order ordinary differential equation, which follows from the second of Equation (
10) for
after integration with respect to
ζ [
45]. These two steps (first guessing the
ζ-dependence, then deriving
x-dependent terms) should be repeated when solving the hierarchy (
10) also for higher
n.
The hard task solved in [
45] was to get
. This small correction is crucial for capturing the ratchet effect, absent in
, because the local-equilibrium form of
cannot support any global current through the system. Fortunately, it is possible to exploit the symmetry of the parabolic potential to get the exact expression for
as the sum of three terms,
with coefficients given by
where the last one, is expressed using auxiliary periodic functions
The two coefficients
,
are simple functions of
x and temperatures. The coefficient
, however, looks quite elaborate. Luckily for us, it does not appear in any expression that follows. The only important part of
is the integration constant
, which determines the mean velocity of the particle (
23). It follows from the requirement of periodicity:
for any integer
m. (The second integration constant,
, should be chosen in accordance with the normalization condition (
8) such that
).
The expansion
is rather convenient. It yields a simple closed analytical solution for any non-linear function
and, more importantly,
it is not restricted to the small temperature difference allowing us to explore inherently far-from-equilibrium phenomena. There are, however, two practical limits of validity that we now emphasize. First, the expansion (
10) holds uniformly in the channel provided the inequality
, is fulfilled for all
x. Otherwise, the expansion could fail locally in extremely wide regions, where
or
. The function
in Equation (
2), chosen for graphical illustrations, satisfies the above inequality. Second, high longitudinal temperature
ruins precision of the approximation, which we also demonstrate in the following. From Equations (
5) and (
6), we observe that, for large
, the product
appearing in the
term is no longer small and a different approximation scheme should be used. These two limitations are specific for the case of a narrow channel with
soft walls. They do not arise for hard-wall channels, where the expansion, similar in spirit to the present one, was used for the first time [
73].
4. Mean Velocity and Heat Current
Basic quantities that characterize ratchet performance are the mean rotation velocity of the wheels
, and the heat flow between reservoirs
. They are defined as long-time (steady-state) averages given by
where
is average particle position (mean angle of rotation of the wheels) and
denotes total amount of heat
accepted on average by the transversal heat bath during the time interval
. We adopt this definition of heat flow (
positive when heat flows from
x to
y reservoir) because it has the same sign as the mean velocity. Indeed, for
(heat flow from transversal to longitudinal), the mean velocity is negative, as one can infer already from
Figure 1.
The both quantities follow directly from results of the preceding section, namely, from calculated components of the stationary reduced probability current (
,
). The mean velocity is just integral of
over the unit cell of the potential,
, which, in the long-time limit, yields
and the average heat flow can be obtained from
,
In the last equation, we have used definition of heat standard in stochastic thermodynamics [
50,
51,
55]. According to the first law of thermodynamics and Equation (
5), the internal energy of the system,
, changes over the course of time as
where
is the mean heat flow into the
x reservoir. According to definition (
17), in the steady state, we have
and the expression (
19) follows directly from the last term on the right-hand side of Equation (
20).
Our convention used in the definition of heat is that heat is positive when it flows from the system to a heat bath. Thus,
(
) denotes the average heat flow
accepted by the longitudinal (transversal) bath. According to the conservation of energy (
20), the following relation between energy flows holds:
). In the steady state, the mean energy of the system is constant, hence we have
and
. On the other hand, in the transient regime (before the steady state is established), the system energy may change and in general
. The expression of the steady-state heat flow into the transversal bath (
19),
in terms of the integrated probability current can be also justified as follows. The heat flow
is identified from the first law of thermodynamics [
50,
51,
55],
, as the second term, which corresponds to the change of potential energy, when the transversal coordinate is changed,
. Using formal manipulation described above Equation (
18), we arrive directly at Equation (
19).
Expansion in the channel width, developed in the last section, yields the stationary probability current in the form
. Hence, Equations (
18) and (
19) become
respectively. The individual summands follow from the corresponding parts of the current, e.g.,
,
, and, similarly, for
.
Frequently, all important physical effects are (at least qualitatively) contained in the lowest order of the Fick–Jacobs theory, described by the simple PDF
, Equation (
11). In our case, however, the fundamental assumption of the Fick–Jacobs approximation renders the lowest order useless for explanation of the ratchet effect. The local equilibrium with the transversal heat bath implies that there is no net heat transfer into the transversal heat bath; therefore, the heat flow to the longitudinal bath is also on average zero. Furthermore, when there is no heat flow, the system cannot act as the heat engine. In Equation (
21), we therefore have
and
, for any
,
. The ratchet effect is covered by the correction
, Equation (
12), which disrupts the local equilibrium, and hence we have
The both quantities can be given by simple expressions. The mean velocity follows from the requirement that the coefficient
, Equation (14), is a 1-periodic function of
x. We get
The mean heat flow can be evaluated directly from its definition (
19) inserting
there as computed using (
12). In the course of the derivation, one finds that the zeroth term of the sum (
12) representing
makes no contribution to the current
. Simplification of the remaining terms gives us
The both main results of the present section, Equations (
23) and (
24), can be further recast into simple scaling forms, which reveals their temperature dependence. Note that temperatures
,
occur in all auxiliary functions used in Equations (
23) and (
24). A closer look reveals that
enters all expressions only in the combination
and, at the same time, almost all powers of
cancel. Eventually, we end up with expressions
where the
master functions and
depend on the combination
only. Hence, they characterize the ratchet performance in a universal manner depending only on the ratio of
and
and not on individual values of temperatures. More importantly, the master functions yield a
figure of merit of the ratchet,
η,
which, in the leading order in
ε, depends only on the ratio of temperatures
. The figure of merit
η quantifies how much heat must flow through the system in order to maintain the rotation velocity
v. It is large when small heat current (small dissipation) is accompanied by large velocity and vice versa. The figure of merit
η is different from the standard efficiency (output power/input heat flow) used to characterize steady-state heat engines [
50,
51,
74,
75]. This standard “energetic” efficiency is bounded by the Carnot efficiency
,
, and reflects effectiveness of energy transformation from accepted heat to a useful work output. The figure of merit
η describes rather a “kinetic performance” of the model, and it is, in principle, not bounded from above. In order to define the standard efficiency in our model, one should introduce an external load, against which the ratchet would perform work. This extension of the model is currently under investigation.
Equations (
25) and (
26) supplemented by exact expressions (
23) and (
24) reveal somewhat unintuitive behavior of the velocity, the heat current and the ratchet figure of merit with respect to the channel width. While both the velocity and the figure of merit are proportional to
, the heat flow becomes nonzero and independent of
ε as
. This means that
for arbitrarily narrow channel whenever
and
ε is arbitrarily small but nonzero. On the other hand, for
, the transversal and longitudinal degrees of freedom decouple and thus
. The heat flow thus experiences a discontinuity when
ε changes from arbitrarily small positive value to zero. This behavior demonstrates what we knew from the very beginning: the system with small, but positive
ε qualitatively differs from the system with
. While the former case represents diffusion in a two-dimensional energy landscape, the latter stands just for a Brownian motion on a line. Similar reasoning explains also another difference between the velocity and the heat flow: the velocity vanishes for symmetric potentials, i.e., for potentials with symmetric
corresponding to symmetric ratchet teeth, while the heat flow is non-zero whenever
varies with
x and
. The nonzero velocity is achievable only in cases where the ratchet teeth are asymmetrical, but the heat flows between the reservoirs whenever they are coupled by a nontrivial interaction between wheels and the pawl.
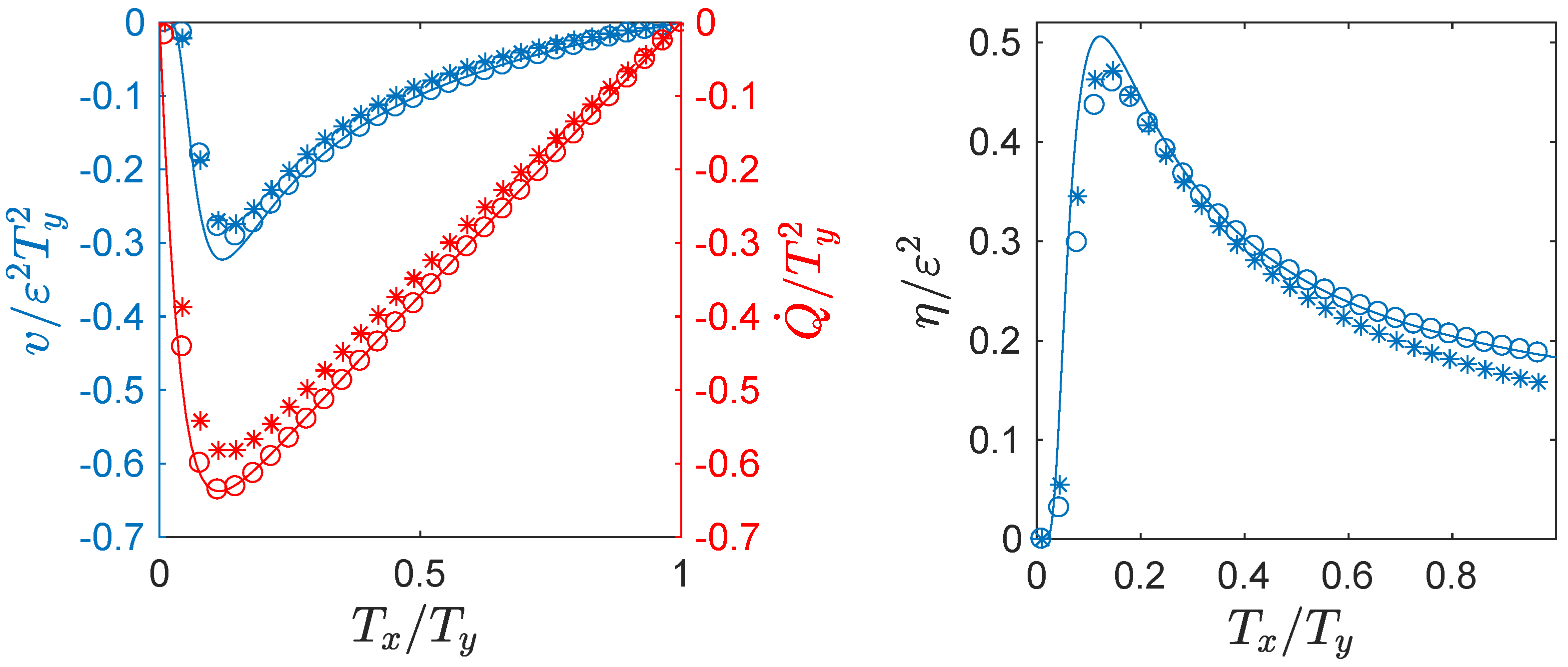
The master functions
and
are plotted in the left panels and the figures of merit
η in the right panels of
Figure 2 and
Figure 3 together with the corresponding quantities obtained numerically by discretizing the underlying Fokker–Planck equation and numerically finding the steady state of the discrete model (see the Appendix in [
45] for detailed description of the numerics). In
Figure 2, the transversal temperature
is fixed and the longitudinal temperature
varies from 0 to
. We see that the agreement between approximate analytical curves and the numerical data is very good for the data obtained for
(circles), while the agreement is only qualitative for the data calculated using
(stars). This is because, in the first case,
is always small and the assumptions used in the analytical derivation are valid, while, in the latter case,
is relatively large and
is not small enough (see the last paragraph of
Section 3). For
, the particle moves on average to the left (
) and the heat flows from the transversal (hot) to the longitudinal (cold) reservoir (
). Both of these quantities vanish for
and for
. For
, the ratchet attains thermal equilibrium where all flows are zero; for
the longitudinal thermal noise is switched off and the particle feels, in the
x-direction, just the deterministic force with no global bias. The fact that, between these two points,
and
immediately implies that both functions attain a global minimum for some
.
The ratchet figure of merit
η in the right panel of
Figure 2 vanishes for
(for
,
v converges to zero faster than
), reaches a constant value for
(
v and
converges to zero at the same rate with
) and attains a maximum value in between. This complicated behavior of
η clearly shows that the quantities
v and
are not simply proportional to each other. Notice that, in this regime, the ratchet effect is readily visible on the level of individual trajectories shown in
Figure 1, in contrast to the case
discussed next.
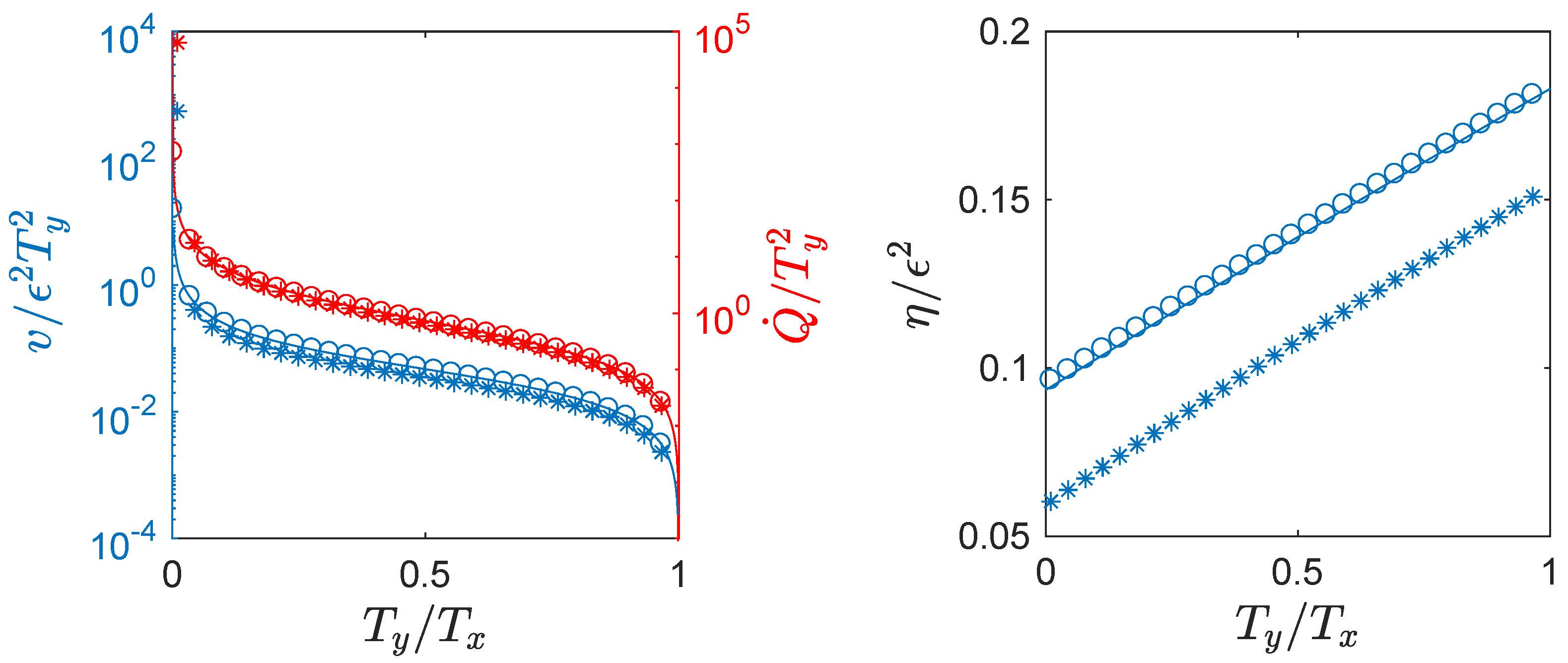
Figure 3 illustrates the ratchet performance in the regime
. In the numerics, we have fixed the longitudinal temperature
and varied the transversal temperature
from 0 to
. Again, analytical curves agree with the numerical data much better for a moderate longitudinal temperature than for large
, although the qualitative agreement is in both cases excellent (see, in particular, the right panel). In this regime, which was rather noisy on the level of individual trajectories (lower left panel in
Figure 1), the particle moves on average to the right (
) and the heat flows to the transversal bath (
). In this case,
v and
also exhibit an extreme because
for
, and both quantities also vanish when
. In the latter limit, the bath does not contain enough energy to push the particle away from the channel central at
, where
. The limit corresponds to the cold pawl standing still just in between the wheels. The fact that in between
and
we have
and
then implies that both variables exhibit a maximum for some
.
If we compare the ratchet performance for the two regimes of operation (
vs.
), on the level of individual trajectories, we find that the regime
is much more advantageous: it both gives a larger mean velocity of the particles and is not that noisy (see lower panels in
Figure 1). The fluctuations (quantified by an effective diffusion coefficient) have been studied in [
45], where it was shown that they are indeed much larger in the regime
. The mean particle velocity can be read from
Figure 2 and
Figure 3. In particular, in
Figure 1, we took
, and
for the regime
and
, and
for the regime
, and, in both cases,
. In the regime
, we can read from
Figure 2 that, for
the rescaled velocity
approximately equals
and because we have
for this regime, we estimate the mean velocity
. On the other hand, in the regime
, we find from
Figure 3 that the rescaled velocity
for
is approximately
and thus the average velocity is
(quantitative disagreement with
Figure 1 is due to the fact that
ε is not small enough there). Thus, the mean velocity in the regime
is by two orders of magnitude smaller than that in the regime
.
The poor performance of the ratchet in the
regime is also evident if we compare energetic costs per velocity, i.e., the figures of merit
η plotted in the right panel of
Figure 3, against that in the
case shown in the right panel of
Figure 2. Both figures of merit are equal for
. From
Figure 3, we see that
η in
regime
decreases with increasing temperature difference. Hence, the maximum attained by
η in
regime is the global maximum of the figure of merit. The only situation when the ratchet with
can have a larger figure of merit is in an extreme situation when the transversal reservoirs (the pawl) are kept at a very cold temperature.
5. Current Circulation and Local Heat Transfer
As first noted in [
56], the origin of the ratchet effect is related to the circulation of probability current. Let us now illustrate this circulation and investigate its connection to the heat flow. To do this, we return back to the physical coordinates
x and
y. The reduced probability density for particle position in a unit cell of the potential, the longitudinal probability current and the transversal probability current in these coordinates can be calculated from the corresponding variables defined in the preceding sections as
,
and
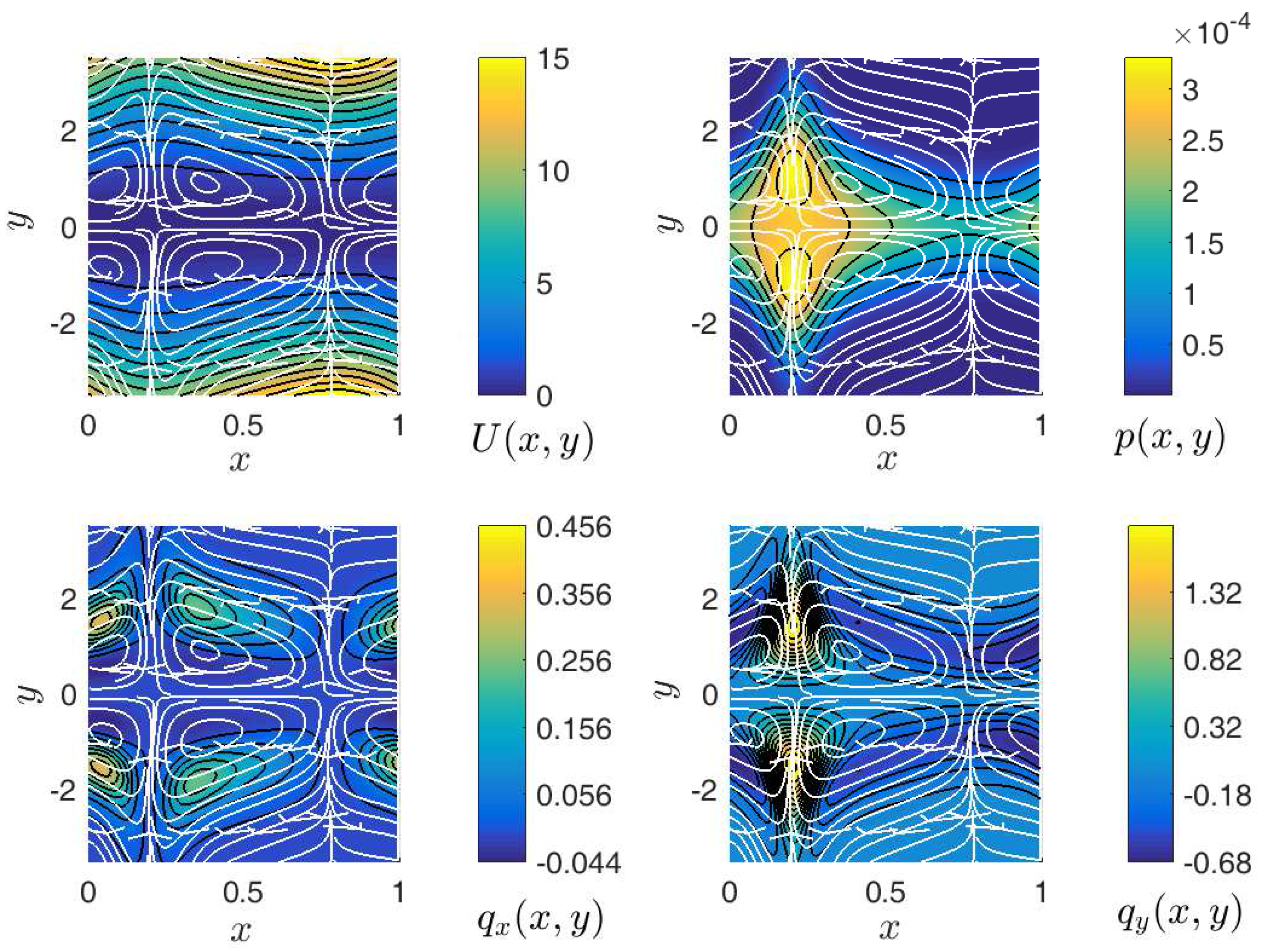
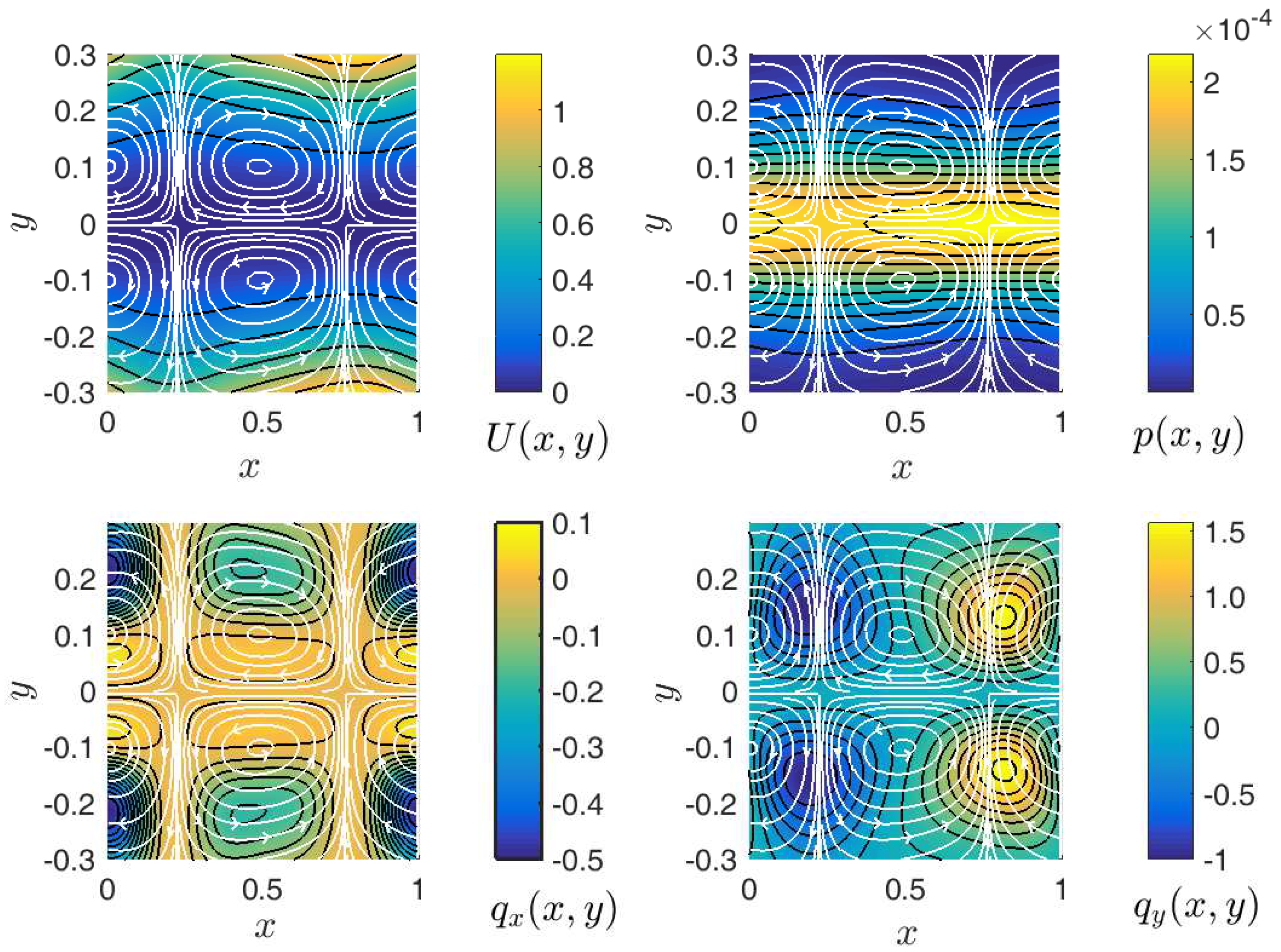
, respectively. The streamlines of the vector
are shown in
Figure 4 for
and in
Figure 5 for
. In both figures, we plot the streamlines on top of four important quantities: the potential landscape
, the reduced probability density
, the local heat flow to the longitudinal reservoir
and the local heat flow to the transversal reservoir
. The shown data were obtained numerically using the same method as in the preceding section.
In the panels with
plotted on top of
, it is clearly visible how the probability currents feed maxima of the reduced probability distributions. These maxima are larger than the corresponding equilibrium values of
P at any of the two temperatures
and
. On the other hand, the panels where the current is plotted on top of the potential and the two heat flows show us at which coordinates the heat is drawn from the
x reservoir (if
points uphill in the
x-direction, then
) and from the
y reservoir (similarly, if
points uphill in the
y-direction,
). The panels with the heat flows also demonstrate how much heat is on average exchanged at a given point with the individual heat reservoirs. Can the complex behavior depicted in
Figure 4 and
Figure 5 be understood and predicted using simple physical arguments? In the rest of this section, we will provide an affirmative answer.
The derivation of the approximate formulas introduced in the preceding sections was based on the Fick–Jacobs theory developed for particles diffusing in a single thermal bath through asymmetric channels with hard walls. Although the expansion in the channel width works well both in the setup with hard walls and in our two-temperature soft-wall model, microscopic explanations of emerging ratchet effects differ. While the ratchet effects occurring in hard-wall channels are of entropic origin [
7,
14,
17,
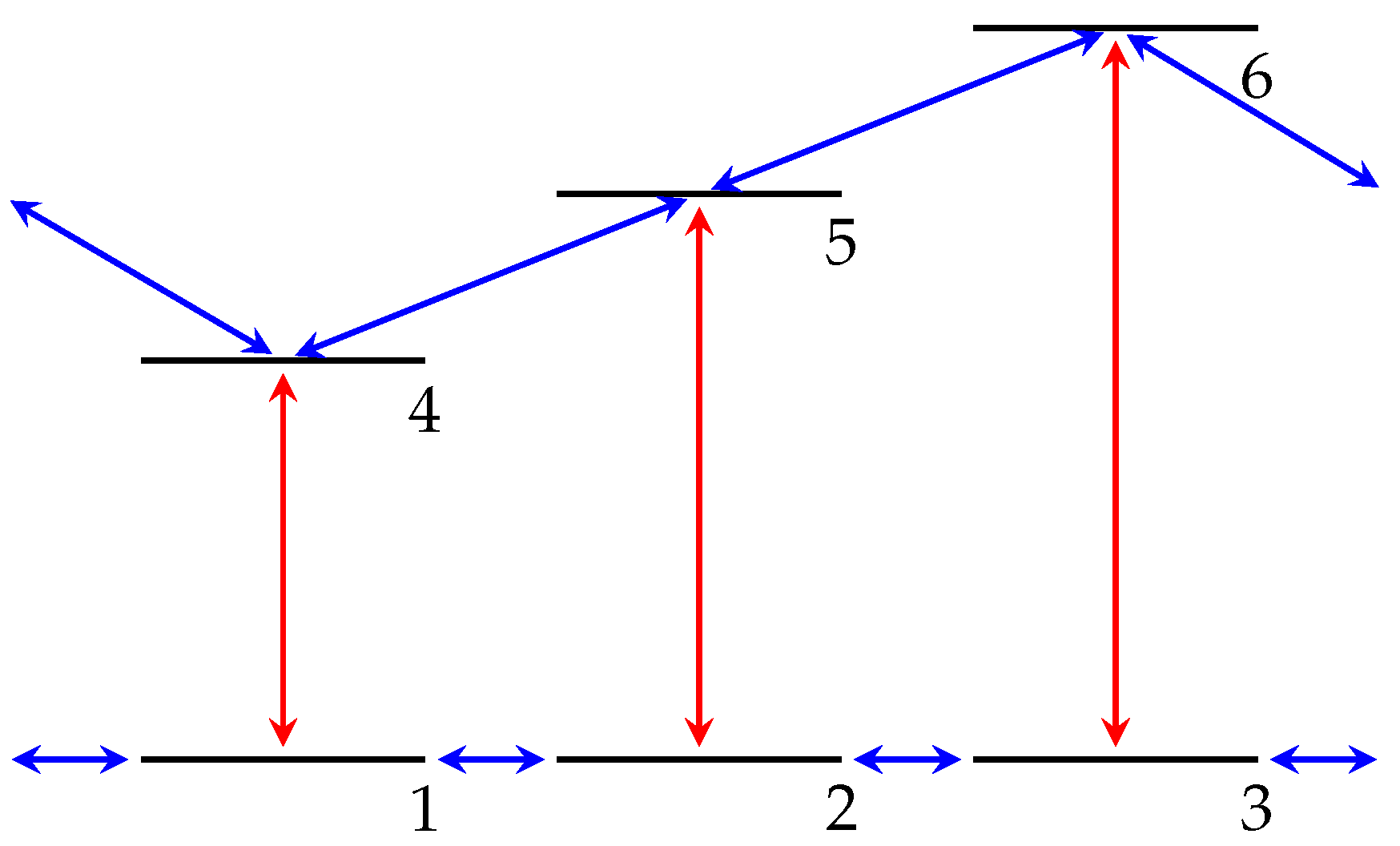
42], the ratchet effect for the present two-temperature soft-wall ratchet is of an energetic nature. In fact, the main operational principle of the present ratchet can be understood with the aid of a simple discrete ratchet model depicted in
Figure 6. Note that an analogous discrete model was introduced in [
64]. In contrast to thorough quantitative analysis of [
64], here we focus on qualitative discussion of the discrete model with the main aim to understand the basic working principle of the continuous model and, in particular, appearance of the circulation of the probability current.
In the
Figure 6, we show one cell of the periodic energy landscape of the discrete ratchet. The red (blue) arrows depict transitions between the discrete states caused by heat exchange with reservoir at the temperature
(
). We assume that the energies of the individual microstates correspond to their vertical position in the sketch, i.e.,
. The discrete ratchet thus represents the roughest possible simplification of the complex two-dimensional model discussed in this paper: the transitions between the lower energy levels correspond to the force-free diffusion in the
x-direction near the channel center (
), while the transitions between the upper levels correspond to the diffusion in the
x-direction at some fixed nonzero
y, where the particle experiences the asymmetric potential. The sites 1 and 4 stand for the
x position with the smallest
(widest channel), and the sites 3 and 6 match the
x position with the largest
(narrowest channel).
The main physical assumption imposed on the system is that the transition rates between the individual states fulfill the detailed balance condition. The transition rates in the
x-direction (blue) satisfy the relation
Similarly we have
for the transitions in the
y-direction (red). These conditions secure that, for
the system reaches the thermal equilibrium state
with vanishing microscopic probability currents,
.
Let us now assume that the system is initially in thermal equilibrium with
and we slightly increase the temperature
(leaving
unaltered). Then, the detailed balance condition (
27) implies that the ratio of transition rates for going from lower to upper states in the
x-direction to the corresponding rates for going back will be increased as compared to the equilibrium situation. Raising
thus leads to positive uphill probability currents in the
x-direction, and the heat flows to the system from the longitudinal bath. In our discrete model, the probability will flow from state 4 to states 5 and 6 and from state 5 to state 6. Meanwhile, the exit rate from state 6 in the
y-direction will be the same as in equilibrium, and thus the occupation of this state will become larger than in equilibrium once a new stationary occupation of the energy levels consistent with the new reservoir temperatures and non-zero microscopic probability currents will be established. In the 2D ratchet model, we observe similar behavior: for
the probability density for position develops a global maximum at the
x position where the channel is narrowest (see
Figure 5). The fact that we get microscopic probability currents uphill in the potential landscape together with the continuity of the probability current implies that, in our discrete model, the probability current will circulate in two circuits: the clockwise circuit
and the counter-clockwise circuit
. Similar circulation of the probability current is also found in the 2D ratchet (see
Figure 5).
Let us now consider the opposite situation
. Analogous with the above reasoning, the detailed balance condition (
27) leads to increased downhill rates and decreased uphill transition rates in the
x-direction with respect to the equilibrium situation
. Probability will thus flow both from the left and from the right to state 4, and the heat flows to the system from the transversal bath. Once the system reaches a new steady state, the occupation probability of state 4 will be larger than the previous equilibrium one. An analogy of this behavior occurs also in the 2D model where the probability density for position develops its global maximum at the
x position where the channel is widest, which can even split the
y-direction into two global maxima positioned outside the minimum of the potential energy landscape (see
Figure 4). Again, the probability current will circulate in two circuits: the counter-clockwise circuit
and the clockwise circuit
. This behavior also mimics the circulation of probability currents emerging in the 2D ratchet (see
Figure 4).
The direction of the global mean probability current can be determined from the following consideration. As we have discussed above, for
the particle will on average move uphill in the
x-direction. Both in the discrete and in the two-dimensional model, the energy landscape is of the sawtooth type: some
x moving uphill in the
x- direction corresponds to the current to the right and vice versa for other
x positions. However, for the discrete energy landscape of
Figure 6 (and also for the potential used in the 2D model), there are less
x positions where the probability would flow to the left than to the right (also the probability to move against smaller energy difference is larger) and thus we obtain the global mean probability current to the right in accordance with
Figure 3. Similar reasoning explains why the global probability current in the system is, for
, directed to the left (see
Figure 2).
To close this section, let us note that the above reasoning based solely on the detailed balance condition (
27) and general characteristics of the problem (different temperatures in
x- and
y-directions and shape of the potential) can be expected to give correct results only in the vicinity of thermal equilibrium, i.e., for small
. For larger temperature differences, the current direction is determined by the detailed form of the transition rates. For example, for the exponential rates
the discrete model yields only one current reversal so our close-to-equilibrium analysis gives correct current direction for all temperatures. On the other hand, for the transition rates of the form
, one finds that the mean probability current changes its sign twice and the above reasoning gives the right current direction for small temperature differences only. Finally, for the specific potential (
1), the dynamics of the 2D ratchet is such that the close to equilibrium analysis always gives the correct direction of the current.
6. Conclusions
The ratchet and pawl mechanism inspired by Feynman’s famous thought experiment can be successfully analyzed by a generalization of the Fick–Jacobs theory. The generalization applies far from thermal equilibrium (
) and captures a fully nonlinear response even for large temperature differences. The mean velocity of rotating wheels and the mean heat current between the reservoirs, Equation (
25), and hence their ratio (the figure of merit, Equation (
26)), are given in terms of scaling functions that depend on the fraction
only. These functions provide a compact description of the ratchet performance in its different working regimes.
The theory predicts a complex behavior of the probability current within the potential unit cell. Further numerical analysis reveals that the ratchet effect is closely related to the circulation of the probability current. The asymmetry of the potential rectifies these vortices and thus the ratchet effect (directed motion) appears. The vortices themselves result from coupling each degree of freedom (wheels and pawl) to heat baths at different temperatures. Their origin is, however, far from being well understood. It is an intriguing open question for further research to reveal the role of circulating currents in creation of directed transport, their connection with the shape of the potential and with local heat currents. We have also shown that it may be helpful to build an intuition studying discrete systems, which we have used to determine direction of the directed motion on physical grounds.
From a general perspective, the present model and the developed theory offer a rare opportunity to discuss and test laws of irreversible thermodynamics far from thermal equilibrium [
57,
58,
60,
61,
62,
76]. Our findings may stimulate further research in this field since the present model serves as a nontrivial example of a strongly nonequilibrium system with known nonlinear response. It also could be very interesting to realize the present model experimentally using optical tweezers [
77,
78,
79,
80,
81,
82]. The different temperatures
,
can be experimentally realized as described in [
77,
82]. The method described therein can be used to achieve temperature differences up to thousands of Kelvins and the ratchet performance can thus be experimentally investigated effectively in the whole temperature range.
Last but not least, it is worth applying the presented analytical method to the original Feynman’s model with a single ratchet wheel and the pawl being pushed against its teeth by a spring [
47,
55,
56,
57]. Then, instead of the
y-symmetric parabolic potential (
1), one should use an asymmetric potential describing force from the spring and possibly a reflecting boundary condition required when the pawl touches the wheel. This setting is qualitatively similar to the present one, yet different in details (the potential, boundary conditions), which helped us to solve the present model analytically. Finally, let us emphasize importance of the spring for the heat transfer between the two reservoirs. To this end, we note that the potential (
1) should be understood as the simplest model of a “soft” repulsion between the pawl and ratchet teeth. It cannot be replaced by a pure elastic hard-wall repulsion without loss of the ratchet effect. For hard-wall repulsion, the potential energy
is constant everywhere in the channel and there is
no heat flow between the two reservoirs (the expressions for heat flows (
20) contain partial derivatives of the potential
U). Thus, for the hard-wall repulsion, the two heat reservoirs decouple and the system cannot work as a ratchet. In all Brownian models of Feynman’s original setting [
47,
55,
56,
57], there is a potential interaction between the two degrees of freedom,
x and
y, which (possibly in cooperation with the reflecting boundary) allows for a heat transfer between the reservoirs.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





