
A Novel Framework for Shock Filter Using Partial Differential Equations


Abstract
:1. Introduction
2. Shock Filter and Its Modifications
3. Fuzzy Shock Filter
3.1. Edge Response Value Analysis
3.2. Fuzzy Shock Filter
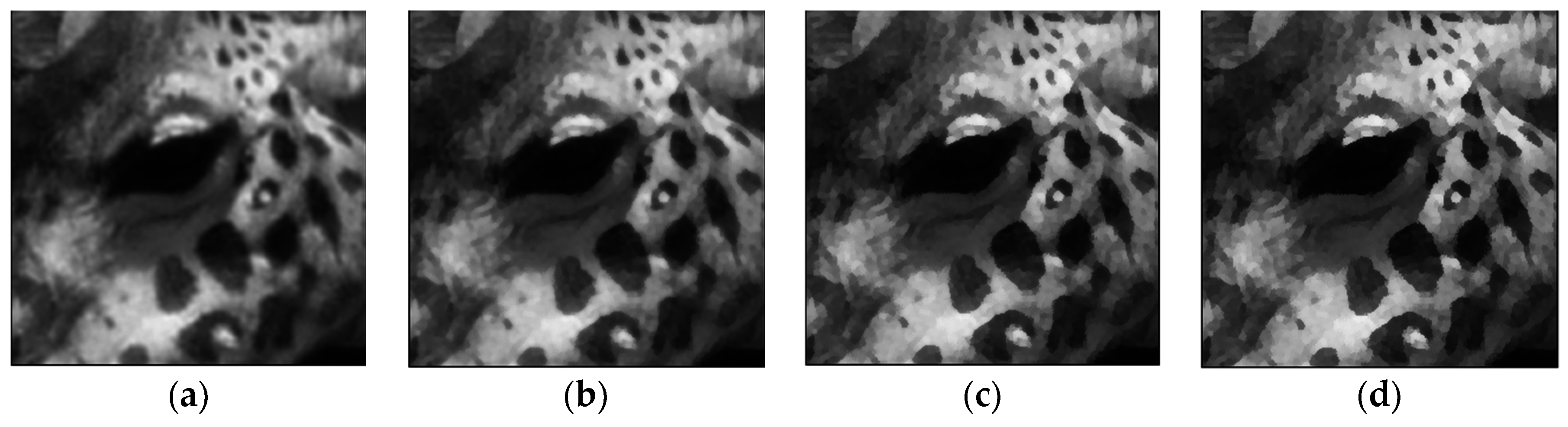
4. Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hong, L.; Wan, Y.; Jain, A.K. Fingerprint image enhancement: Algorithm and performance evaluation. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 777–789. [Google Scholar] [CrossRef]
- Chen, B.; Chen, Y.; Shao, Z.; Tong, T.; Luo, L. Blood vessel enhancement via multi-dictionary and sparse coding: Application to retinal vessel enhancing. Neurocomputing 2016, 110–117. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, X.; Lu, S.; Wang, S. Smart detection on abnormal breasts in digital mammography based on contrast-limited adaptive histogram equalization and chaotic adaptive real-coded biogeography-based optimization. Simulation 2016, 92, 873–885. [Google Scholar] [CrossRef]
- Coulon, O.; Arridge, S.R. Dual echo MR image processing using multi-spectral probabilistic diffusion coupled with shock filters. In Proceedings of the MIUA’2000 British Conference on Medical Image Understanding and Analysis, London, UK, July 2000. [Google Scholar]
- Demirel, H.; Anbarjafari, G. Discrete Wavelet Transform-Based Satellite Image Resolution Enhancement. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1997–2004. [Google Scholar] [CrossRef]
- Schettini, R.; Corchs, S. Underwater image processing: State of the art of restoration and image enhancement methods. EURASIP J. Adv. Signal Process. 2010. [Google Scholar] [CrossRef]
- Starck, J.L.; Murtagh, F.; Candes, E.J.; Donoho, D.L. Gray and color image contrast enhancement by the curvelet transform. IEEE Trans. Image Process. 2003, 12, 706–717. [Google Scholar] [CrossRef] [PubMed]
- Kuo, C.; Yang, N.; Liu, C.; Tseng, P.; Chang, C. An effective and flexible image enhancement algorithm in compressed domain. Multimed. Tools Appl. 2016, 75, 1177–1200. [Google Scholar] [CrossRef]
- Arici, T.; Dikbas, S.; Altunbasak, Y. A Histogram Modification Framework and Its Application for Image Contrast Enhancement. IEEE Trans. Image Process. 2009, 18, 1921–1935. [Google Scholar] [CrossRef] [PubMed]
- Zhan, K.; Teng, J.; Shi, J.; Li, Q.; Wang, M. Feature-linking model for image enhancement. Neural Comput. 2016, 28, 1072–1100. [Google Scholar] [CrossRef] [PubMed]
- Gilboa, G.; Sochen, N.; Zeevi, Y.Y. Image enhancement and denoising by complex diffusion processes. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1020–1036. [Google Scholar] [CrossRef] [PubMed]
- Osher, S.; Rudin, L.I. Feature-oriented image enhancement using shock filters. SIAM J. Numer. Anal. 1990, 27, 919–940. [Google Scholar] [CrossRef]
- Prada, F.; Kazhdan, M. Unconditionally stable shock filters for image and geometry processing. Comput. Gr. Forum 2015, 34, 201–210. [Google Scholar] [CrossRef]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef]
- Elmoataz, A.; Lezoray, O.; Bougleux, S. Nonlocal discrete regularization on weighted graphs: A framework for image and manifold processing. IEEE Trans. Image Process. 2008, 17, 1047–1060. [Google Scholar] [CrossRef] [PubMed]
- Ta, V.T.; Elmoataz, A.; Lézoray, O. Nonlocal pdes-based morphology on weighted graphs for image and data processing. IEEE Trans. Image Process. 2011, 20, 1504–1516. [Google Scholar] [PubMed]
- Kornprobst, P.; Deriche, R.; Aubert, G. Image sequence analysis via partial differential equations. J. Math. Imaging Vis. 1999, 11, 5–26. [Google Scholar] [CrossRef]
- Sochen, N.; Kimmel, R.; Bruckstein, A.M. Diffusions and confusions in signal and image processing. J. Math. Imaging Vis. 2001, 14, 195–209. [Google Scholar] [CrossRef]
- Aubert, G.; Kornprobst, P. Mathematical Problems in Image Processing: Partial Differential Equations and the Calculus of Variations; Springer: Berlin/Heidelberg, Germany, 2006; Volume 147. [Google Scholar]
- Kim, T.H.; Lee, K.M. Segmentation-free dynamic scene deblurring. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2766–2773. [Google Scholar]
- Prasath, V.S.; Vorotnikov, D. On a system of adaptive coupled PDEs for image restoration. J. Math. Imaging Vis. 2014, 48, 35–52. [Google Scholar] [CrossRef]
- Kramer, H.P.; Bruckner, J.B. Iterations of a non-linear transformation for enhancement of digital images. Pattern Recognit. 1975, 7, 53–58. [Google Scholar] [CrossRef]
- Sadi, A.; Elmoataz, A.; Toutain, M. Nonlocal PDE morphology: A generalized shock operator on graph. Signal Image Video Process. 2016, 10, 439–446. [Google Scholar] [CrossRef]
- Zhou, X.; Mateos, J.; Zhou, F.; Molina, R.; Katsaggelos, A.K. Variational Dirichlet Blur Kernel Estimation. IEEE Trans. Image Process. 2015, 24, 5127–5139. [Google Scholar] [CrossRef] [PubMed]
- Zang, Y.; Huang, H.; Zhang, L. Guided adaptive image smoothing via directional anisotropic structure measurement. IEEE Trans. Vis. Comput. Gr. 2015, 21, 1015–1027. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, L.; Mazorra, L. Signal and image restoration using shock filters and anisotropic diffusion. SIAM J. Numer. Anal. 1994, 31, 590–605. [Google Scholar] [CrossRef]
- Weickert, J. Coherence-Enhancing Shock Filters. Lect. Notes Comput. Sci. 2003. [Google Scholar] [CrossRef]
- Gilboa, G.; Sochen, N.A.; Zeevi, Y.Y. Regularized shock filters and complex diffusion. In Proceedings of the 7th European Conference on Computer Vision; Springer: London, UK, 2002; pp. 399–413. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Images | Iteration Times | Quantity | sign | atan | tanh | FS(0.2, 0.7) | FS(5, 1) | FS(0, 1) | FS(0.3, 0.6) |
|---|---|---|---|---|---|---|---|---|---|
| Shapes | 5 | PSNR | 26.3889 | 26.4506 | 26.4017 | 42.8651 | 26.4969 | 55.1689 | 35.3540 |
| 5 | SSIM | 0.8839 | 0.8842 | 0.8832 | 0.9980 | 0.8865 | 0.9999 | 0.9870 | |
| 20 | PSNR | 36.6110 | 36.6484 | 36.6189 | 49.5914 | 36.7211 | 58.2816 | 43.0428 | |
| 20 | SSIM | 0.9863 | 0.9866 | 0.9864 | 0.9996 | 0.9866 | 0.9999 | 0.9978 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, C.; Lu, H. A Novel Framework for Shock Filter Using Partial Differential Equations. Entropy 2017, 19, 142. https://doi.org/10.3390/e19040142
Duan C, Lu H. A Novel Framework for Shock Filter Using Partial Differential Equations. Entropy. 2017; 19(4):142. https://doi.org/10.3390/e19040142
Chicago/Turabian StyleDuan, Chunmei, and Hongqian Lu. 2017. "A Novel Framework for Shock Filter Using Partial Differential Equations" Entropy 19, no. 4: 142. https://doi.org/10.3390/e19040142
APA StyleDuan, C., & Lu, H. (2017). A Novel Framework for Shock Filter Using Partial Differential Equations. Entropy, 19(4), 142. https://doi.org/10.3390/e19040142