1. Introduction
Acceleration degradation testing (ADT) is commonly used to obtain degradation data of products over a short time period, to help extrapolate lifetime and reliability under usage conditions [
1]. In an ADT, products are exposed to higher-than-use conditions to get the degradation data in a short time [
2,
3]. Therefore, ADT is very popular in industrial application [
4,
5,
6]. In planning an ADT, initial values of some unknown model parameters must be specified to optimize a test plan by trading off between constraints and utilities. To capture the uncertainties embedded in these parameters, Bayesian ADT design is utilized, and this method treats model parameters as random variables by assigning prior distributions based on the available historical data and expert’s knowledge. Hence, compared to the traditional ADT optimal design, in which the crisp values are taken for the model parameters, Bayesian optimal design is a global optimal method.
In the last decade, Bayesian ADT design has been widely employed, wherein the optimal ADT plan is designed by maximizing the utility with the constraints of test resource. Liu and Tang [
7] proposed a Bayesian design method for ADT, with physically-based statistical models. A single-path power-law statistical degradation model with nonlinear stress life relationships is developed. Based on this model, the optimal objective is to minimize the expected pre-posterior variance of the quantile life at the use condition. Shi and Meeker [
8] presented a Bayesian method for accelerated destructive degradation tests (ADDT), under a class of nonlinear degradation models with one accelerating variable. The optimal objective was to maximize the precision of a specified failure-time distribution quantile under usage conditions. Li et al. [
1] developed a Bayesian methodology for designing step stress accelerated degradation testing (SSADT) with the objective of relative entropy. It is assumed that the degradation model follows a drift Brownian motion, and the acceleration model follows the Arrhenius equation. The Markov chain Monte Carlo (MCMC) and surface fitting method are chosen to solve for optimality.
For the aforementioned Bayesian ADT design method, the optimal plan depends on the prior information entirely, which is referred to as the static Bayesian design method. However, when the difference between prior information and the actual situation is large, the optimal plan designed by the static Bayesian design method might lead to the over-testing or under-testing problems, which means the test resources have been consumed more or the collected ADT data are insufficient. To avoid these issues, the partial collected ADT data could contribute to updating the prior information so as to modify the test plan by dynamic decision making. Hence, Bayesian optimal design for sequential ADT, referred to as the dynamic Bayesian design method, is proposed in this paper.
For a sequential test design, when the data of the first batch of samples have been obtained, engineers can use this fresh information to optimize or adjust the subsequent test plan. The method has been employed in accelerated life testing (ALT). Liu and Tang [
9] presented a sequential constant stress ALT (CSALT) scheme based on the Weibull distribution, and two frameworks of the Bayesian inference method are discussed, i.e., the all-at-one prior distribution construction and the full sequential prior distribution construction. Tang and Liu [
10] also proposed the sequential CSALT design method. The objective is to minimize the expectation of the posterior variance of the estimated life percentile at the use condition. Under the sequential scheme, a test at highest stress is first planned and conducted. Using the information obtained at the highest stress level, a Bayesian framework was proposed to optimally determine both the sample allocation and stress combination at lower stress levels of subsequent accelerated tests. Based on the framework in [
10], an auxiliary acceleration factor (AAF) was introduced to further amplify the failure probability at low stress levels in [
11]. For its good performance of the dynamic decision, the typical application of the sequential test design lies in reliability acceptance sampling testing. Wald [
12] proposed a sequential sampling testing method, where a judgment that the batch of the product is accepted, rejected or the test should be continued is proposed when a fault occurs. In this way, the obtained failure information can be fully used to save the test resources. Nezhad et al. [
13] introduced a new sequential acceptance sampling plan based on dynamic programming. A suitable cost model was employed for depicting the cost of sampling, accepting or rejecting the lot.
In this paper, a Bayesian optimal design for sequential ADT is proposed to enhance the efficiency and effectiveness of ADT. During the sequential ADT, the test at the highest stress is firstly conducted based on the prior information to quickly generate degradation information. Then, the data collected at the highest stress are used to construct the prior distributions for the test design at lower stress levels using the Bayesian inference method. The proposed methodology can be referred to as the Bayesian sequential step-down-stress ADT. In the proposed sequential scheme, the degradation path is assumed to follow the inverse Gaussian (IG) process, which has been demonstrated as a flexible family for degradation modeling by Ye and Chen [
14], Peng et al. [
15] and Peng et al. [
16]. Moreover, the IG process has also been demonstrated to be more suitable than the Wiener process and the gamma process for degradation modeling in some applications [
17,
18]. Therefore, it is of interest to further study the sequential scheme based on the IG process model. In addition, Bayesian D-optimality [
19] is selected as the objective that minimizes the determinant of the covariance matrix of the model parameter estimates [
20]. The remaining paper is organized as follows. In
Section 2, the test scheme and Bayesian planning criterion are proposed. In
Section 3, the planning of a sequential step-down ADT is presented. In
Section 4, the case study is conducted to illustrate the validity and effectiveness of the proposed method.
Section 5 concludes this paper.
2. The Test Scheme and Bayesian Optimization
2.1. The Test Scheme
A sequential ADT design is a type of dynamic decision process in which the test plan is dynamically adjusted after the ADT operation on each stress level. As the test at a higher stress level can generate more degradation data in a short time to support the plan design at a lower stress level, the accelerated stress level will be conducted with time in a step-down way; then, an ADT will be first run under the highest stress level.
In order to present the scheme of sequential ADT design, the following settings will be firstly given. In a sequential ADT with accelerated stress levels (i.e., and , there are n test items and M total degradation measurements. Let the specified accelerated stress levels be a vector and the specified number of degradation measurements on each accelerated stress level be a vector , where denotes the number of degradation measurements on the k-th stress level, and then, . A sequential ADT plan , hence, can be written as .
Since there are
K accelerated stress levels, correspondingly, the sequential ADT design is divided into
K stages; see
Figure 1 for the schematic diagram of sequential testing design.
denotes the usage stress level at which the product’s certain reliability measure needs to be estimated. The scheme of sequential testing is as follows:
Stage 1: Both
n and
M are predefined according to the budget and practical situation before an ADT. The initial optimal test plan
is obtained through the existing Bayesian optimal design method [
19] based on the initial prior information. Then, we can make an initial decision
to conduct the ADT at the highest stress level based on
.
Stage 2: After the test under the higher stress level is completed, the corresponding degradation data can be collected. Then, the posterior information could be calculated by the Bayesian inference, which then will be treated as the prior information for the test design at the lower stress level. Hence, the optimal plan for the lower stress level can simultaneously be designed by the Bayesian method, and the decision could be correspondingly adjusted.
Stage 3: Repeat Stage 2 for times to make decisions, and the whole sequential ADT is completed after finishing the test on the lowest level. Then, the final posterior distributions could be used to estimate the product’s reliability measures under .
We remind that the proposed Bayesian sequential scheme is totally different from the empirical Bayesian, since each degradation datum applied in this paper is used only once.
2.2. ADT Model and Assumption
The degradation path of a product is assumed to satisfy the IG process. Let be the degradation path, and its associated failure is defined to be the event that crosses a pre-specified threshold level ; the corresponding first-passage-time is denoted as .
If a degradation process has the following three properties, we say it is an IG process.
- (1)
with probability one;
- (2)
has independent increments, i.e., and are independent, for ;
- (3)
each increment follows an IG distribution, i.e., , where , , , is a given monotone increasing function of time t with .
For any
, the probability density function (PDF) of
,
,
, with mean
u and variance
, is defined by,
Then, the degradation increments
x can be described by
. The mean and variance of
are
and
, respectively. Substituting
and
into Equation (
1) yields the PDF of
x as,
In order to make both the degradation speed and the degradation volatility increase with the stress, the parameter
is assumed as the degradation rate of a product [
21]. Then, it is a function of the accelerated stress
S, i.e., it is an acceleration model denoted by
and could be written as follows,
where the parameters
a and
b need to be estimated from ADT. For convenience, the stress level can be standardized by using a normalization scheme. In this paper, the linear normalization method is applied. Let
and
be the usage stress level and operational stress limit, respectively. Then,
is a standardized function of
S and expressed as [
22],
where
represents a known function of
S. For example, if temperature is selected as accelerated stress,
; if the electric stress is accelerated stress,
.
The parameter
has no physical meaning and is assumed to be a constant in an ADT, i.e.,
. Since
and
are both time-independent, the process can be called the homogeneous IG process or simple IG process. Generally, there are three different shapes of performance degradation trend: linear, convex and concave. Hence, it is appropriate to assume
[
23]. As the path of IG process is strictly increasing, the cumulative distribution function (CDF) of
for a given threshold
can be expressed as,
Let
be the non-overlapped interval of degradation measurements and kept constant during ADT, then the test duration
on the
k-th stress level is
. When
is the measurement result of the
j-th measurement of the
i-th unit on the
k-th stress level at time
, the degradation increment is
and follows Equation (
2). Then, based on Equation (
2), the likelihood function is,
For the sake of simplicity, we assume that the four parameters (i.e.,
and
) in Equation (
5) are independent of each other and consist of the parameter vector
.
2.3. Prior and Posterior Distributions
When the degradation increment x follows an IG distribution, and should be positive. Therefore, some positive distributions (i.e., Gamma, logistic and Weibull distributions) can be used to depict the uncertainties embedded in and , respectively; while normal, logistic and extreme value distributions can be used to depict uncertainties embedded in a and b.
In our proposed scheme of the sequential ADT, the prior distributions of
under the highest stress level are obtained based on the prior information before ADT. For example, when historical degradation data are available as prior information, the mean and the variance of the model parameters can be obtained by using the maximum likelihood estimation method and square root of the determinant of the inverse matrix of the Fisher information matrix. As long as the distribution form of the prior distribution is determined [
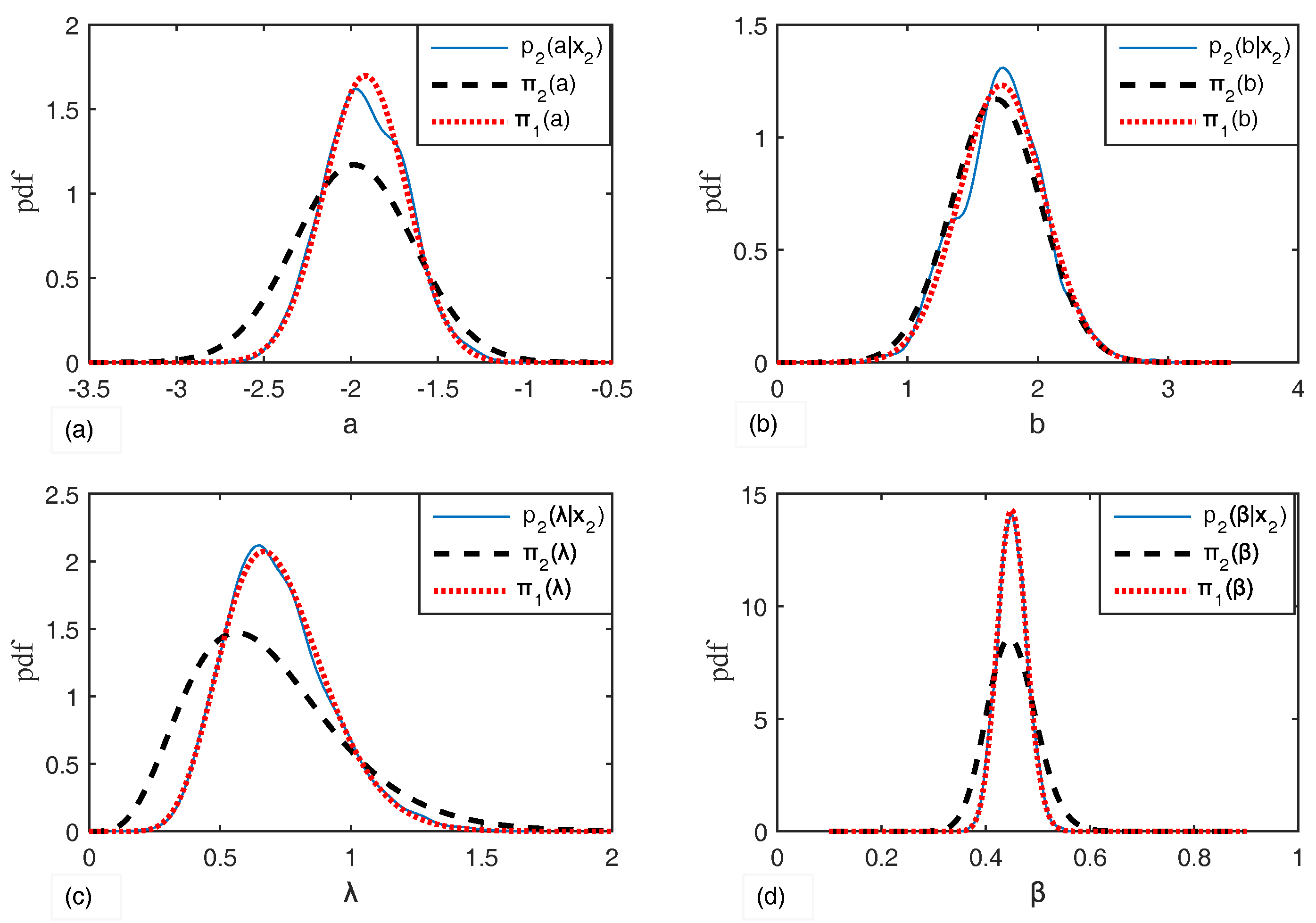
19], the hyper-parameters can be determined, and the prior distributions are settled. However, the prior distributions under other lower stress levels are obtained by the posterior distributions of the relatively higher stress level.
According to the Bayesian theory, the posterior distributions
of
can be expressed as [
24],
where
are the prior distributions of
. Generally, since it is difficult to derive posterior distributions in a closed form, the MCMC algorithm will be used to generate samples from intractable posterior distributions, which provide the basis for subsequent model inference [
25].
2.4. Bayesian Optimal Criterion
According to Li et al. [
19], the D-optimality is the most robust optimal objective among the three common objectives (i.e., relative entropy, quadratic loss function and D-optimality) in Bayesian design. Hence, the D-optimality is selected as the optimal objective in this study, which is to maximize the determinant of the Fisher information matrix [
26]. It could be written as follows [
27],
where the symbol “det” denotes the determinant of the matrix;
denotes the Bayesian information matrix expressed as follows,
where symmetrical denotes that the matrix is symmetric, and the matrix
must be non-singular. The expressions for all of the elements in
are given in
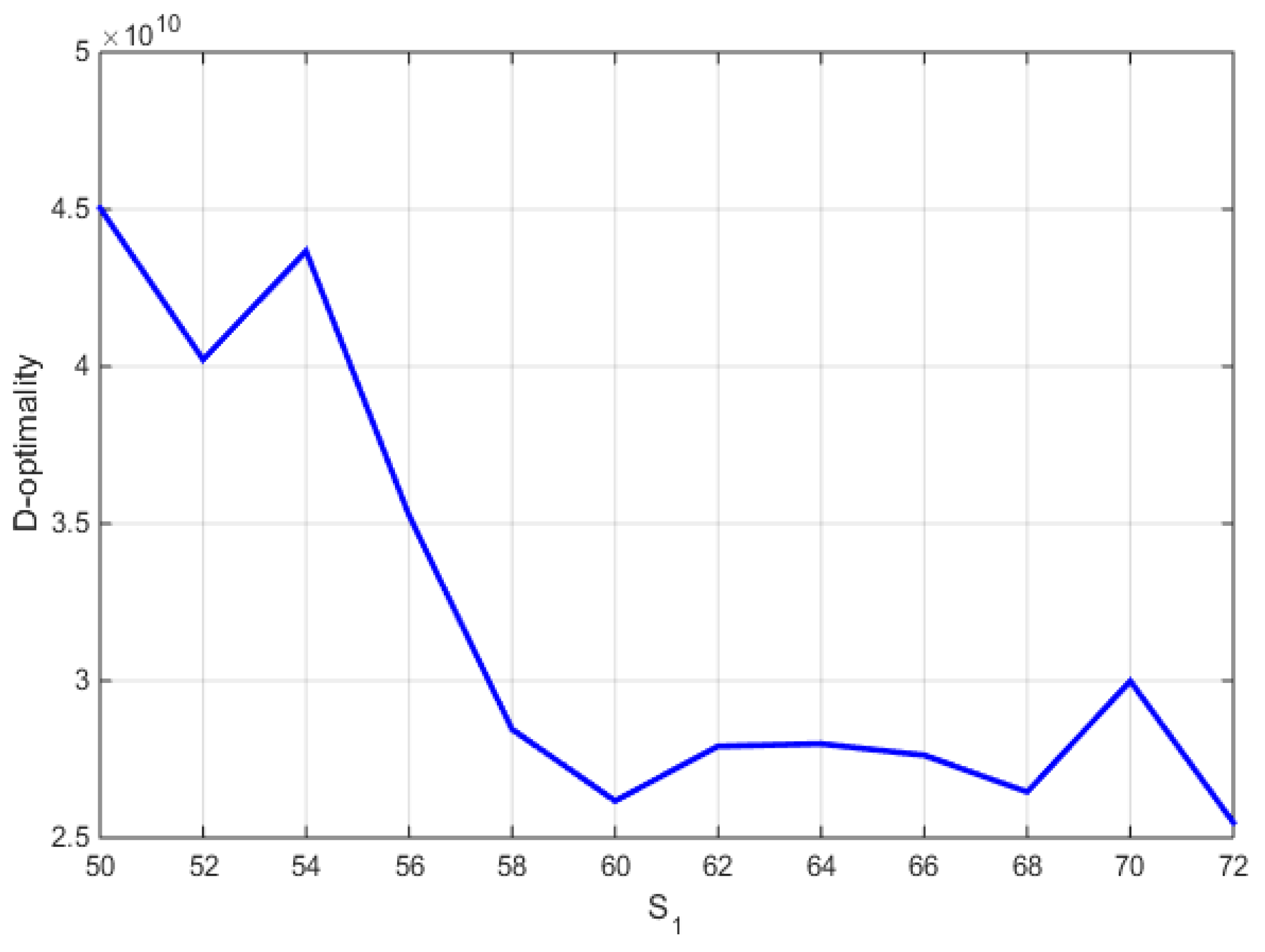
Appendix A Then, the Bayesian D-optimality is to maximize Equation (
8), which can be expressed as
. Due to the complexity of the formulas in Equation (
9), a large-sample approximation is utilized to simplify the formulas to numerically calculate the objective of plan
. Details are given as follows:
Step 1: A plan space
is firstly defined, which contains
R choices of test plans
. As for
,
, simulate parameter
from the corresponding
for
times (
). Based on the simulated
, generate degradation data
from the sampling distribution (
2) for
times (
).
Step 2: According to the Appendix, calculate the elements of Equation (
9) based on the drawn
and
.
Step 3: Numerically calculate the value of Equation (
8) based on
.
5. Conclusions
A Bayesian sequential step-down-stress ADT design method is proposed, in which the test under the highest stress level is conducted first to quickly generate degradation information. With the prior information and the ADT data collected under the preorder stress levels, the Bayesian interference and design methods are used for planning the subsequent ADT planning. In the proposed sequential scheme, the degradation path is assumed to follow the IG process, and Bayesian D-optimality is selected as the objective.
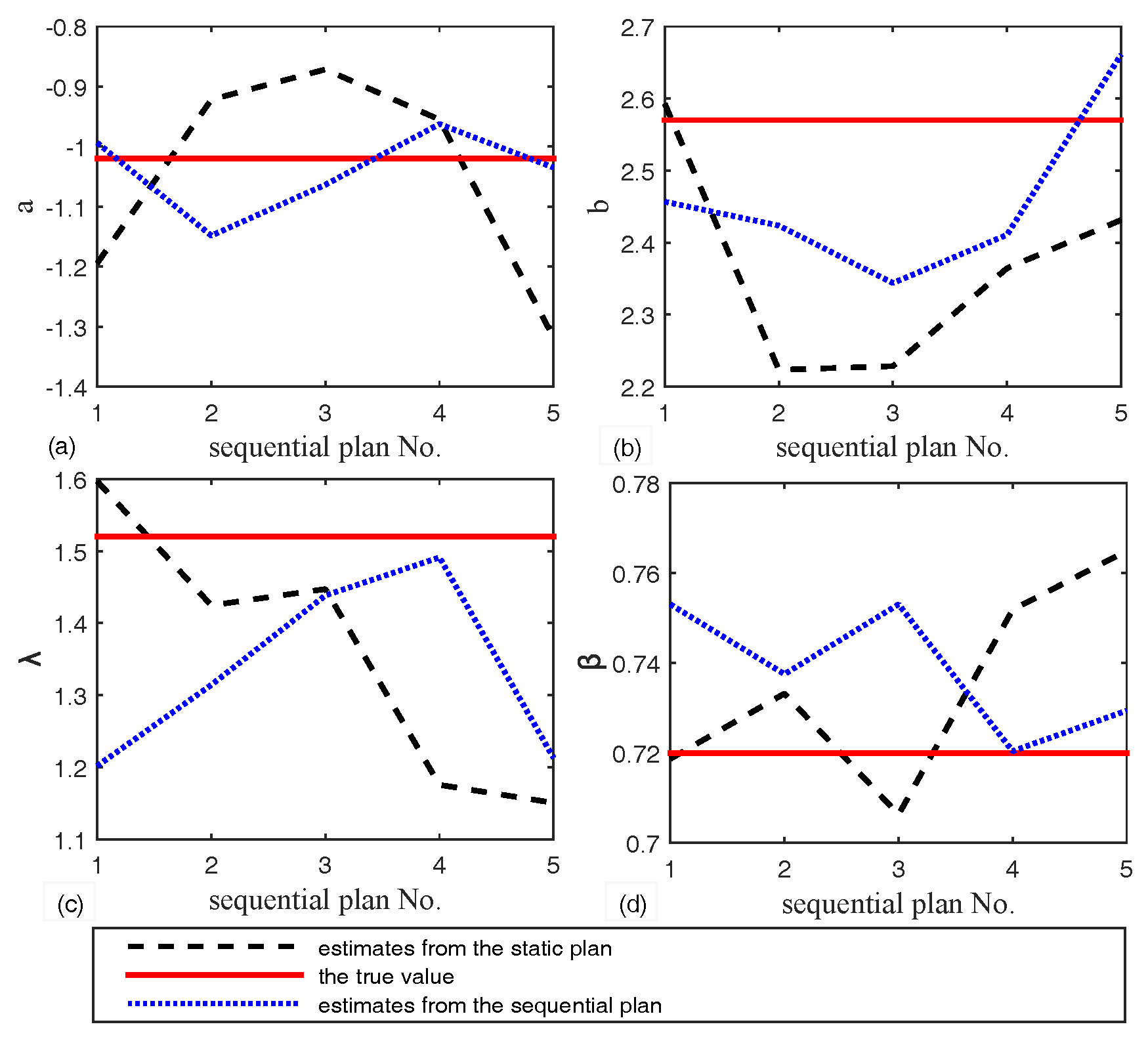
When there is a relatively big difference between priors and actual situations of samples, from the numerical example, we can draw the following conclusions:
- (1)
The ADT plan can be dynamically adjusted with the collected ADT data.
- (2)
The Bayesian sequential ADT design method outperform the Bayesian static design method on both the accuracy of the evaluation and the robustness of the misspecification of the initial planning parameter value.
The proposed scheme is conducted without the constraints of the total test cost, which could be taken into account in the future work for practical application. In addition, D-optimality is selected as the only objective, which expresses the evaluation precision of model parameters. It is noted that there exist many Bayesian objectives, which express different utilities for ADT design; therefore, it could be considered to design sequential ADT plans under the multi-objective optimization model with different utilities as the objectives.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









