A New Belief Entropy to Measure Uncertainty of Basic Probability Assignments Based on Belief Function and Plausibility Function


Abstract
:1. Introduction
2. Preliminaries
D–S Evidence Theory
3. Uncertainty Measures for Belief Structures
3.1. Existing Uncertainty Measures for Belief Structures
3.2. The New Belief Entropy
4. Numerical Experimental
4.1. Example 1
4.2. Example 2
4.3. Example 3
4.4. Example 4
4.5. Example 5
4.6. Example 6
4.7. Example 7
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huynh, V.N. Discounting and combination scheme in evidence theory for dealing with conflict in information fusion. In International Conference on Modeling Decisions for Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; pp. 217–230. [Google Scholar]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. In Classic Works of the Dempster–Shafer Theory of Belief Functions; Springer: Berlin/Heidelberg, Germany, 2008; pp. 57–72. [Google Scholar]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- He, Z.; Jiang, W. A new belief Markov chain model and its application in inventory prediction. Int. J. Prod. Res. 2018, 56, 2800–2817. [Google Scholar] [CrossRef]
- Deng, X. Analyzing the monotonicity of belief interval based uncertainty measures in belief function theory. Int. J. Intell. Syst. 2018, 33, 1869–1879. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W.; Wang, Z. Zero-sum polymatrix games with link uncertainty: A Dempster–Shafer theory solution. Appl. Math. Comput. 2019, 340, 101–112. [Google Scholar] [CrossRef]
- Denœux, T.; Sriboonchitta, S.; Kanjanatarakul, O. Evidential clustering of large dissimilarity data. Knowl. Based Syst. 2016, 106, 179–195. [Google Scholar] [CrossRef] [Green Version]
- Lian, C.; Ruan, S.; Denœux, T.; Li, H.; Vera, P. Spatial evidential clustering with adaptive distance metric for tumor segmentation in FDG-PET images. IEEE Trans. Biomed. Eng. 2018, 65, 21–30. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.; Jiang, W. Dependence assessment in human reliability analysis using an evidential network approach extended by belief rules and uncertainty measures. Ann. Nucl. Energy 2018, 117, 183–193. [Google Scholar] [CrossRef]
- Han, Y.; Deng, Y. An enhanced fuzzy evidential DEMATEL method with its application to identify critical success factors. Soft Comput. 2018, 22, 5073–5090. [Google Scholar] [CrossRef]
- Zheng, H.; Deng, Y. Evaluation method based on fuzzy relations between Dempster–Shafer belief structure. Int. J. Intell. Syst. 2018, 33, 1343–1363. [Google Scholar] [CrossRef]
- Huynh, V.N. Recent advances of uncertainty management in knowledge modelling and decision making. Ann. Oper. Res. 2017, 256, 199–202. [Google Scholar] [CrossRef] [Green Version]
- Fei, L.; Deng, Y. A new divergence measure for basic probability assignment and its applications in extremely uncertain environments. Int. J. Intell. Syst. 2018. [Google Scholar] [CrossRef]
- Denoeux, T. Maximum likelihood estimation from uncertain data in the belief function framework. IEEE Trans. Knowl. Data Eng. 2013, 25, 119–130. [Google Scholar] [CrossRef]
- Duan, Y.; Cai, Y.; Wang, Z.; Deng, X. A novel network security risk assessment approach by combining subjective and objective weights under uncertainty. Appl. Sci. 2018, 8, 428. [Google Scholar] [CrossRef]
- Jiang, W. A correlation coefficient for belief functions. Int. J. Approx. Reason. 2018, 103, 94–106. [Google Scholar] [CrossRef]
- He, Z.; Jiang, W. An evidential dynamical model to predict the interference effect of categorization on decision making results. Knowl. Based Syst. 2018, 150, 139–149. [Google Scholar] [CrossRef]
- Chatterjee, K.; Zavadskas, E.K.; Tamošaitienė, J.; Adhikary, K.; Kar, S. A hybrid MCDM technique for risk management in construction projects. Symmetry 2018, 10, 46. [Google Scholar] [CrossRef]
- Yin, L.; Deng, X.; Deng, Y. The negation of a basic probability assignment. IEEE Trans. Fuzzy Syst. 2018. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Huynh, V.N. Noise-Averse Combination Method. In Proceedings of the 2016 IEEE 28th International Conference on Tools with Artificial Intelligence (ICTAI), San Jose, CA, USA, 6–8 November 2016; pp. 86–90. [Google Scholar]
- Yager, R.R. On the fusion of non-independent belief structures. Int. J. Gen. Syst. 2009, 38, 505–531. [Google Scholar] [CrossRef] [Green Version]
- Zavadskas, E.K.; Antucheviciene, J.; Hajiagha, R.; Hossein, S.; Hashemi, S.S. The interval-valued intuitionistic fuzzy MULTIMOORA method for group decision making in engineering. Math. Probl. Eng. 2015, 2015, 560690. [Google Scholar] [CrossRef]
- Zhang, W.; Deng, Y. Combining conflicting evidence using the DEMATEL method. Soft Comput. 2018, 1–10. [Google Scholar] [CrossRef]
- Ferreira, F.A.F.; Meidutė-Kavaliauskienė, I.; Zavadskas, E.K.; Jalali, M.S.; Catarino, S.M. A Judgment-Based Risk Assessment Framework for Consumer Loans. Int. J. Inf. Technol. Decis. Mak. 2018, 1–27. [Google Scholar] [CrossRef]
- Pal, J.K.; Ray, S.S.; Cho, S.B.; Pal, S.K. Fuzzy-Rough Entropy Measure and Histogram Based Patient Selection for miRNA Ranking in Cancer. IEEE/ACM Trans. Comput. Boil. Bioinform. 2018, 15, 659–672. [Google Scholar] [CrossRef] [PubMed]
- Shannon, C.E. A mathematical theory of communication. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2001, 5, 3–55. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Podvezko, V. Integrated determination of objective criteria weights in MCDM. Int. J. Inf. Technol. Decis. Mak. 2016, 15, 267–283. [Google Scholar] [CrossRef]
- Yin, L.; Deng, Y. Toward uncertainty of weighted networks: An entropy-based model. Phys. A Stat. Mech. Its Appl. 2018, 508, 176–186. [Google Scholar] [CrossRef]
- Krylovas, A.; Kosareva, N.; Zavadskas, E.K. WEBIRA-comparative analysis of weight balancing method. Int. J. Comput. Commun. Control. 2018, 12, 238–253. [Google Scholar] [CrossRef]
- Deng, W.; Deng, Y. Entropic methodology for entanglement measures. Phys. A Stat. Mech. Its Appl. 2018, 512, 693–697. [Google Scholar] [CrossRef]
- Yager, R.R. Entropy and specificity in a mathematical theory of evidence. Int. J. Gen. Syst. 1983, 9, 249–260. [Google Scholar] [CrossRef]
- Klir, G.J.; Lewis, H.W. Remarks on “Measuring ambiguity in the evidence theory”. IEEE Trans. Syst. Man Cybern. Part A 2008, 38, 995–999. [Google Scholar] [CrossRef]
- Klir, G.J. Uncertainty and Information: Foundations of Generalized Information Theory; John Wiley and Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Deng, Y. Deng entropy. Chaos Solitons Fractals 2016, 91, 549–553. [Google Scholar] [CrossRef]
- Tsallis, C. Possible generalization of Boltzmann-Gibbs statistics. J. Stat. Phys. 1988, 52, 479–487. [Google Scholar] [CrossRef]
- Hartley, R.V.L. Transmission of information 1. Bell Syst. Tech. J. 1928, 7, 535–563. [Google Scholar] [CrossRef]
- Körner, R.; Näther, W. On the specificity of evidences. Fuzzy Sets Syst. 1995, 71, 183–196. [Google Scholar] [CrossRef]
- Höhle, U. Entropy with respect to plausibility measures. In Proceedings of the 12th IEEE International Symposium on Multiple Valued Logic, Paris, France, 25–27 May 1982. [Google Scholar]
- Klir, G.J.; Ramer, A. Uncertainty in the Dempster–Shafer theory: A critical re-examination. Int. J. Gen. Syst. 1990, 18, 155–166. [Google Scholar] [CrossRef]
- Pal, N.R.; Bezdek, J.C.; Hemasinha, R. Uncertainty measures for evidential reasoning I: A review. Int. J. Approx. Reason. 1992, 7, 165–183. [Google Scholar] [CrossRef]
- Yang, Y.; Han, D. A new distance-based total uncertainty measure in the theory of belief functions. Knowl. Based Syst. 2016, 94, 114–123. [Google Scholar] [CrossRef]
- Li, Y.; Deng, Y. Generalized Ordered Propositions Fusion Based on Belief Entropy. Int. J. Comput. Commun. Control. 2018, 13, 792–807. [Google Scholar] [CrossRef]
- Li, M.; Zhang, Q.; Deng, Y. Evidential identification of influential nodes in network of networks. Chaos Solitons Fractals 2018. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W.; Zhang, J. Zero-sum matrix game with payoffs of Dempster–Shafer belief structures and its applications on sensors. Sensors 2017, 17, 922. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Deng, Y. A new failure mode and effects analysis model using Dempster–Shafer evidence theory and grey relational projection method. Eng. Appl. Artif. Intell. 2018, 76, 13–20. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Huynh, V.N. Two-probabilities focused combination in recommender systems. Int. J. Approx. Reason. 2017, 80, 225–238. [Google Scholar] [CrossRef]
- Jiang, W.; Hu, W. An improved soft likelihood function for Dempster–Shafer belief structures. Int. J. Intell. Syst. 2018, 33, 1264–1282. [Google Scholar] [CrossRef]
- Chen, L.; Deng, X. A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory. Appl. Sci. 2018, 8, 563. [Google Scholar] [CrossRef]
- Jiroušek, R.; Shenoy, P.P. A new definition of entropy of belief functions in the Dempster–Shafer theory. Int. J. Approx. Reason. 2018, 92, 49–65. [Google Scholar] [CrossRef] [Green Version]
- Kang, B.; Deng, Y.; Hewage, K.; Sadiq, R. Generating Z-number based on OWA weights using maximum entropy. Int. J. Intell. Syst. 2018, 33, 1745–1755. [Google Scholar] [CrossRef]
- Yao, K.; Ke, H. Entropy operator for membership function of uncertain set. Appl. Math. Comput. 2014, 242, 898–906. [Google Scholar] [CrossRef]
- Harmanec, D.; Klir, G.J. Measuring total uncertainty in Dempster–Shafer theory: A novel approach. Int. J. Gen. Syst. 1994, 22, 405–419. [Google Scholar] [CrossRef]
- Lebowitz, J.L. Boltzmann’s entropy and time’s arrow. Phys. Today 1993, 46, 32. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. A note on measures of specificity for fuzzy sets. Int. J. Gen. Syst. 1985, 10, 279–283. [Google Scholar] [CrossRef]
- George, T.; Pal, N.R. Quantification of conflict in Dempster–Shafer framework: A new approach. Int. J. Gen. Syst. 1996, 24, 407–423. [Google Scholar] [CrossRef]
- Abellán, J. Analyzing properties of Deng entropy in the theory of evidence. Chaos Solitons Fractals 2017, 95, 195–199. [Google Scholar] [CrossRef]
- Xiao, F. A Hybrid Fuzzy Soft Sets Decision Making Method in Medical Diagnosis. IEEE Access 2018, 6, 25300–25312. [Google Scholar]
- Han, Y.; Deng, Y. A novel matrix game with payoffs of Maxitive Belief Structure. Int. J. Intell. Syst. 2018. [Google Scholar] [CrossRef]
- Xu, H.; Deng, Y. Dependent evidence combination based on shearman coefficient and pearson coefficient. IEEE Access 2018, 6, 11634–11640. [Google Scholar] [CrossRef]
- Wang, X.; Song, Y. Uncertainty measure in evidence theory with its applications. Appl. Intell. 2017, 48, 1–17. [Google Scholar] [CrossRef]
- Tsallis, C. Introduction to Nonextensive Statistical Mechanics: Approaching a Complex World; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Definition | Cons.with D–S | Non-neg | Prob.cons | Additivity | Subadd |
|---|---|---|---|---|---|
| Höhle | yes | no | yes | yes | no |
| Smets. | yes | no | no | yes | no |
| Yager | yes | no | yes | yes | no |
| Nguyen | yes | no | yes | yes | no |
| Dubois–Prade | yes | no | no | yes | yes |
| Lamata–Moral | yes | yes | yes | yes | no |
| Klir–Ramer | yes | yes | yes | yes | no |
| Klir–Parviz | yes | yes | yes | yes | no |
| Pal et al | yes | yes | yes | yes | no |
| Maeda–Ichihashi | no | no | yes | yes | yes |
| Harmanec–Klir | no | no | yes | yes | yes |
| Abellán–Moral | no | no | yes | yes | yes |
| Jousselme et al | no | yes | yes | yes | no |
| Pouly et al | no | yes | yes | yes | no |
| Deng | yes | yes | yes | no | no |
| New entropy | yes | yes | yes | no | no |
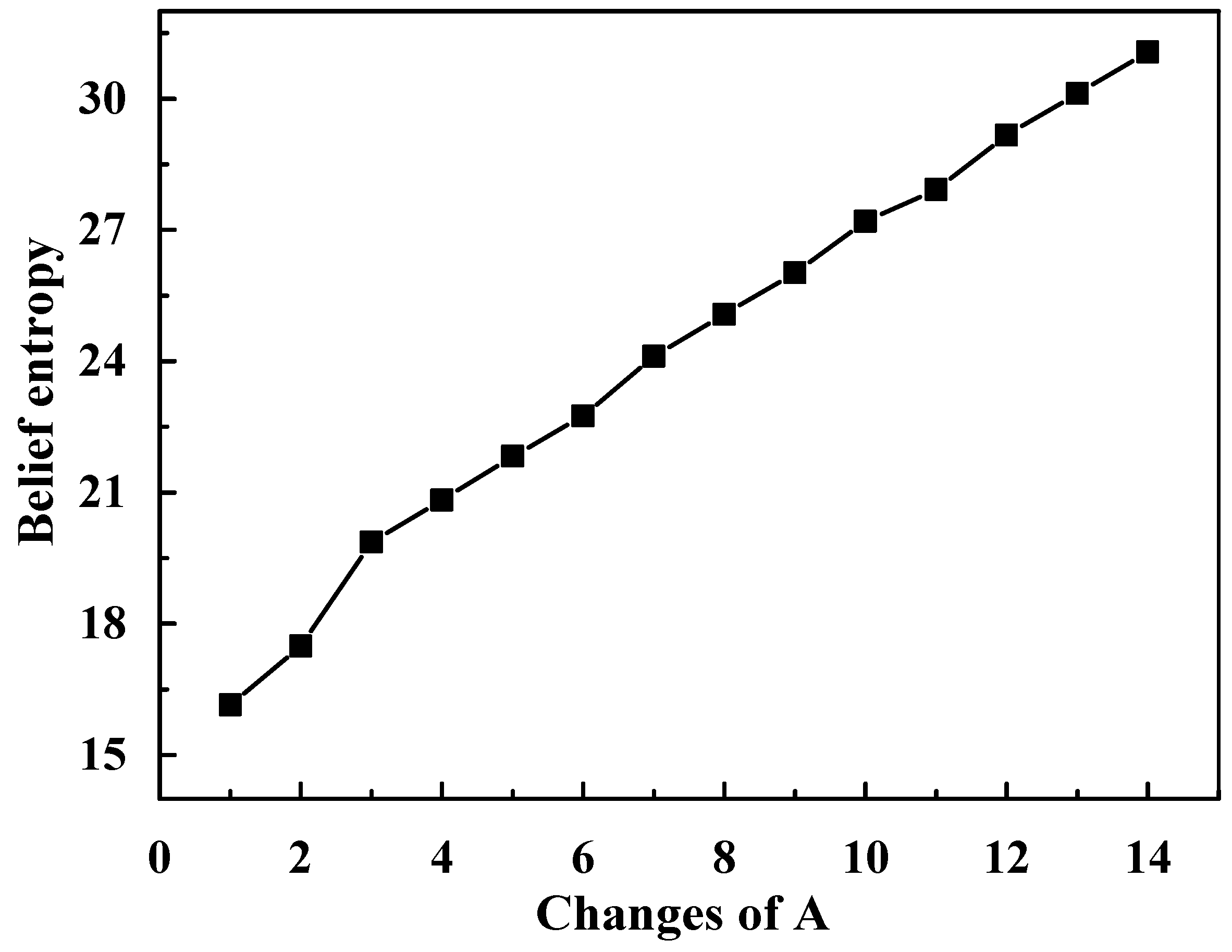
| Cases | New Belief Entropy |
|---|---|
| A = {1} | 16.1443 |
| A = {1, 2} | 17.4916 |
| A = {1, 2, 3} | 19.8608 |
| A = {1, 2, 3, 4} | 20.8229 |
| A = {1, 2, ⋯, 5} | 21.8314 |
| A = {1, 2, ⋯, 6} | 22.7521 |
| A = {1, 2, ⋯, 7} | 24.1131 |
| A = {1, 2, ⋯, 8} | 25.0685 |
| A = {1, 2, ⋯, 9} | 26.0212 |
| A = {1, 2, ⋯, 10} | 27.1947 |
| A = {1, 2, ⋯, 11} | 27.9232 |
| A = {1, 2, ⋯, 12} | 29.1370 |
| A = {1, 2, ⋯, 13} | 30.1231 |
| A = {1, 2, ⋯, 14} | 31.0732 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, L.; Deng, Y. A New Belief Entropy to Measure Uncertainty of Basic Probability Assignments Based on Belief Function and Plausibility Function. Entropy 2018, 20, 842. https://doi.org/10.3390/e20110842
Pan L, Deng Y. A New Belief Entropy to Measure Uncertainty of Basic Probability Assignments Based on Belief Function and Plausibility Function. Entropy. 2018; 20(11):842. https://doi.org/10.3390/e20110842
Chicago/Turabian StylePan, Lipeng, and Yong Deng. 2018. "A New Belief Entropy to Measure Uncertainty of Basic Probability Assignments Based on Belief Function and Plausibility Function" Entropy 20, no. 11: 842. https://doi.org/10.3390/e20110842
APA StylePan, L., & Deng, Y. (2018). A New Belief Entropy to Measure Uncertainty of Basic Probability Assignments Based on Belief Function and Plausibility Function. Entropy, 20(11), 842. https://doi.org/10.3390/e20110842