Kullback–Leibler Divergence Based Distributed Cubature Kalman Filter and Its Application in Cooperative Space Object Tracking

Abstract
:1. Introduction
- A distributed Bayesian filter is developed, which can be treated as an extension of the traditional Bayesian filter [7] and an extension of distributed linear filters [18,19,31] to a nonlinear case. By maximizing a posterior estimation method, we show that the global posterior estimation can be achieved by consensus of each local posterior distribution, where the consensus of PDFs is obtained by an information-theoretic approach.
- Based on the developed distributed Bayesian filter structure, a distributed cubature Kalman filter (DCKF) is proposed, which can improve the effectiveness and practicality for applications. Different from the design in [26], the only global information we required is the number of sensor, which is more suitable for applications.
- The cooperative space object tracking problem is studied. Different from [26], we focus on the scenario in which the communication topology may change due to the blockage of the Earth. Moreover, we also consider the case that measurement mapping of each sensor may differ, which will lead to the problem of weak observability for some sensors. The issues of weak observability and blockage are handled by the proposed DCKF.
2. Problem Formulation
2.1. Distributed Bayesian Filter Formulation
2.2. Consensus of Probability Densities
3. Distributed Cubature Kalman Filter
3.1. Distributed Bayesian Filter
3.2. Distributed Cubature Kalman Filter
| Algorithm 1 DCKF at node i at time k |
Ensure: At time k, a prior information and ;
|
4. Numerical Simulations
4.1. Dynamics of Space Target
4.2. Measurement Model
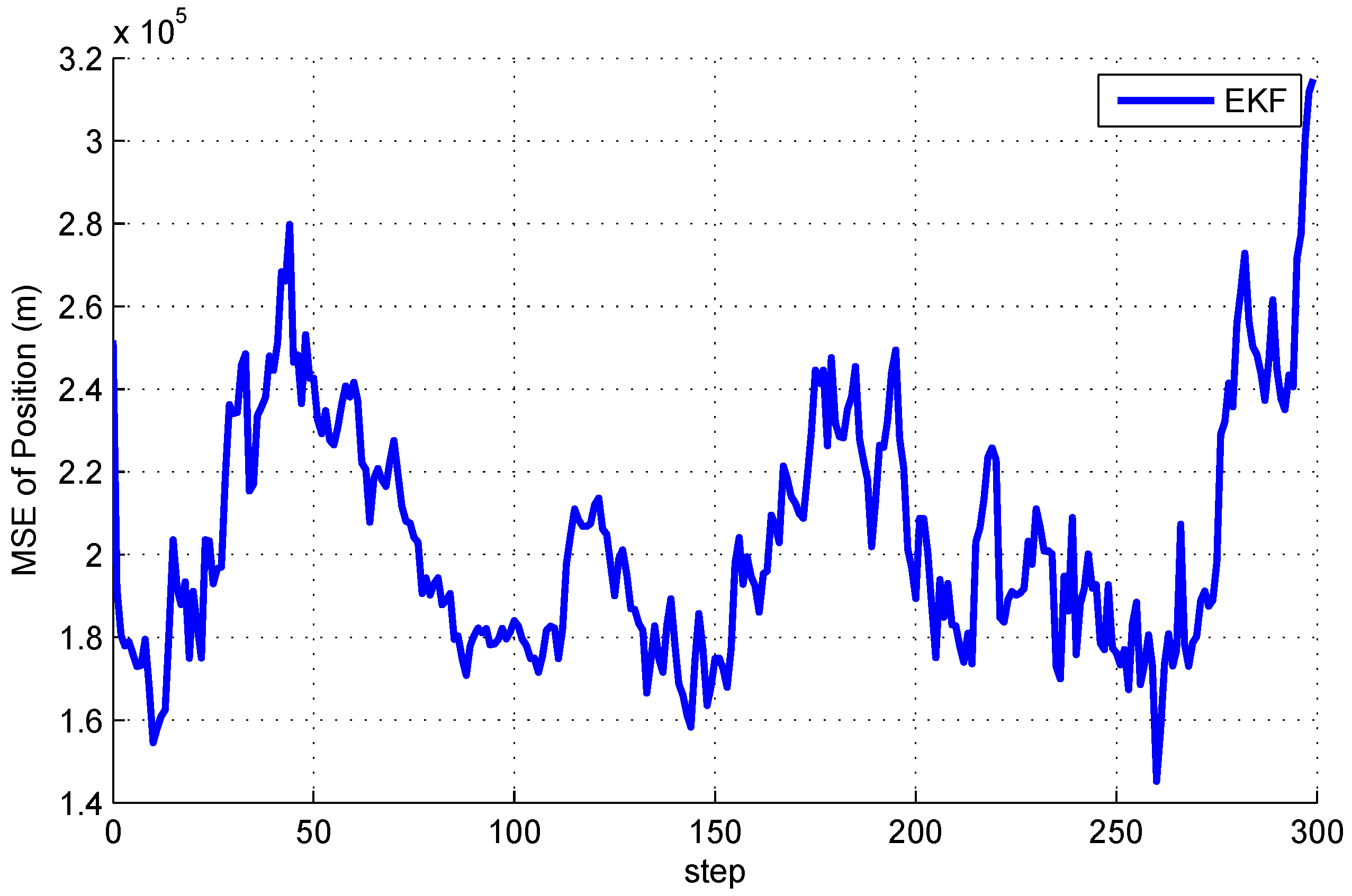
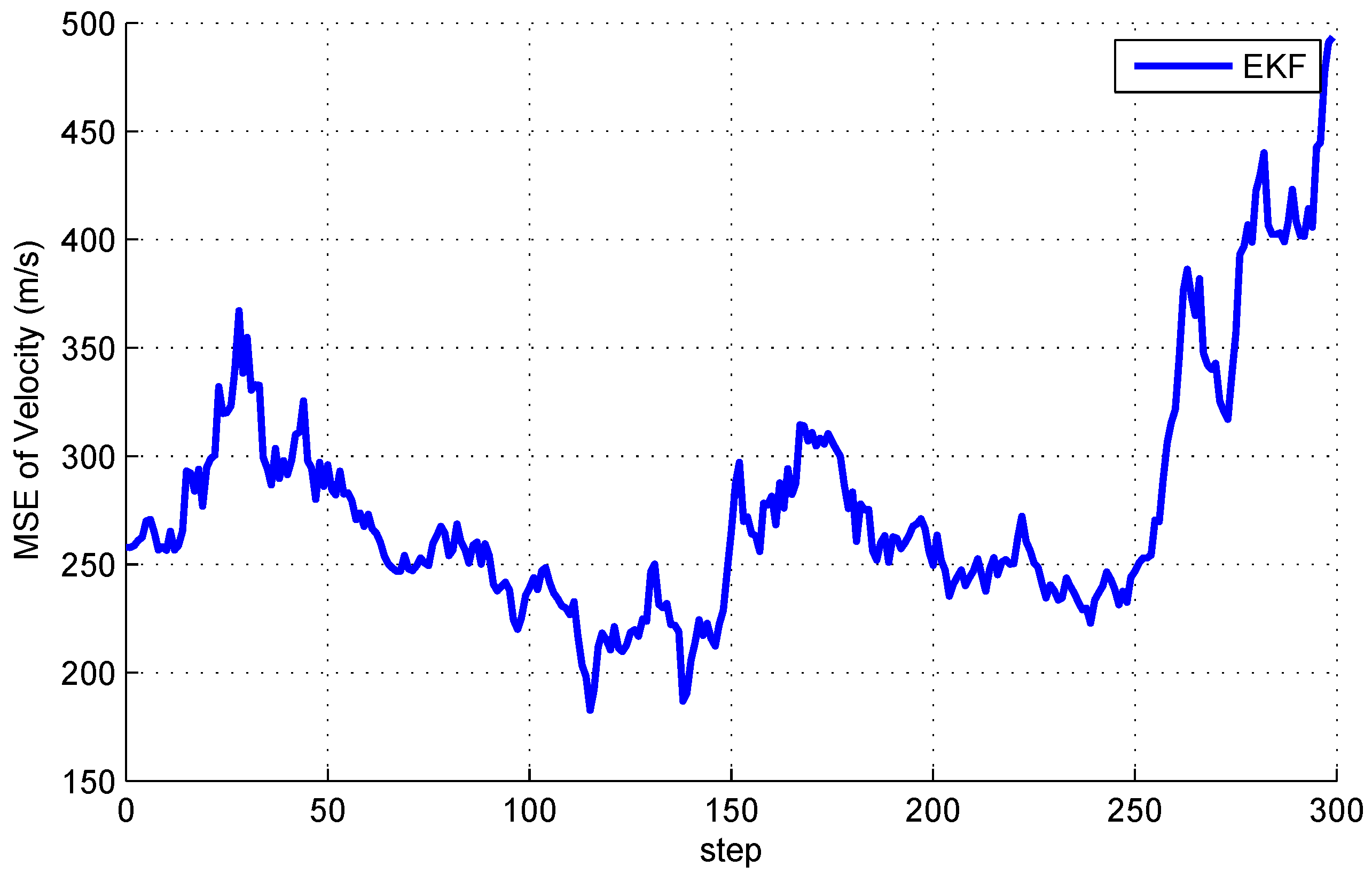
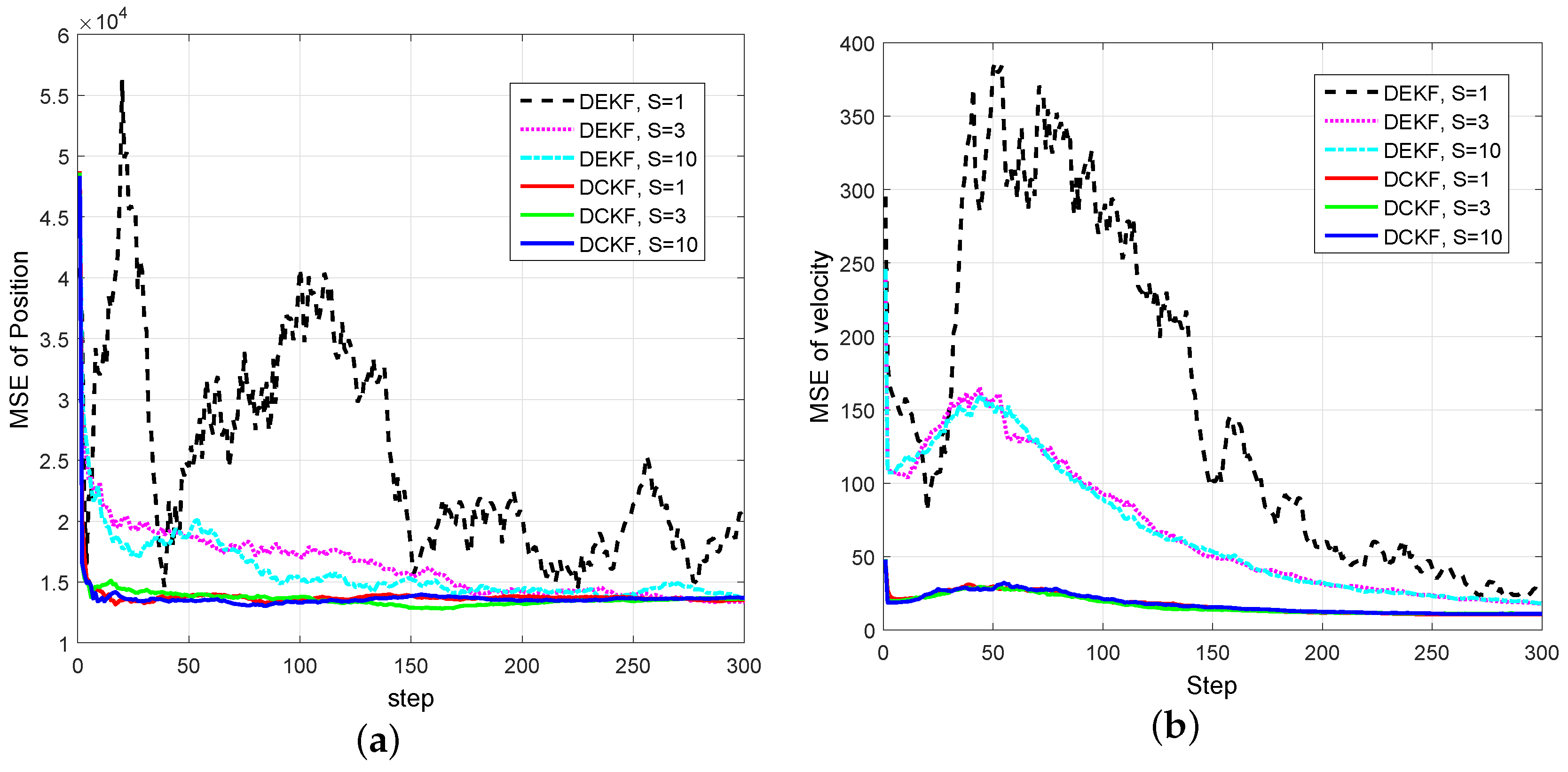
4.3. Simulation Results
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Oliva, R.; Blasch, E.; Ogan, R. Applying aerospace technologies to current issues using systems engineering: 3rd aess chapter summit. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 34–41. [Google Scholar] [CrossRef]
- Kennewell, J.A.; Vo, B.N. An overview of space situational awareness. In Proceedings of the 2013 16th IEEE International Conference on Information Fusion (FUSION), Istanbul, Turkey, 9–12 July 2013; pp. 1029–1036. [Google Scholar]
- Weeden, B.; Cefola, P.; Sankaran, J. Global space situational awareness sensors. In Proceedings of the 2010 Advanced Maui Optical and Space Surveillance Conference, Maui, HI, USA, 14–17 September 2010. [Google Scholar]
- Vladimirova, T.; Bridges, C.P.; Paul, J.R.; Malik, S.A.; Sweeting, M.N. Space-based wireless sensor networks: Design issues. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; pp. 1–14. [Google Scholar]
- Teixeira, B.O.; Santillo, M.A.; Erwin, R.S.; Bernstein, D.S. Spacecraft tracking using sampled-data Kalman filters. IEEE Control Syst. 2008, 28. [Google Scholar] [CrossRef]
- Tian, X.; Chen, G.; Blasch, E.; Pham, K.; Bar-Shalom, Y. Comparison of three approximate kinematic models for space object tracking. In Proceedings of the 2013 16th International Conference on IEEE Information Fusion (FUSION), Istanbul, Turkey, 9–12 July 2013; pp. 1005–1012. [Google Scholar]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Prentice-Hall: Upper Saddle River, NJ, USA, 1979; pp. 62–77. [Google Scholar]
- Reif, K.; Günther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the discrete-time extended Kalman filter. IEEE Trans. Autom. Control 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Bolognani, S.; Tubiana, L.; Zigliotto, M. Extended Kalman filter tuning in sensorless PMSM drives. IEEE Trans. Ind. Appl. 2003, 39, 1741–1747. [Google Scholar] [CrossRef]
- Carme, S.; Pham, D.T.; Verron, J. Improving the singular evolutive extended Kalman filter for strongly nonlinear models for use in ocean data assimilation. Inverse Probl. 2001, 17, 1535. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Zhou, H.; Huang, H.; Zhao, H.; Zhao, X.; Yin, X. Adaptive Unscented Kalman Filter for Target Tracking in the Presence of Nonlinear Systems Involving Model Mismatches. Remote Sens. 2017, 9, 657. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Ge, Q.; Xu, D.; Wen, C. Cubature information filters with correlated noises and their applications in decentralized fusion. Signal Process. 2014, 94, 434–444. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Multiple sensor estimation using a new fifth-degree cubature information filter. Trans. Inst. Meas. Control 2015, 37, 15–24. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Kalman-consensus filter: Optimality, stability, and performance. In Proceedings of the Joint IEEE Conference on Decision and Control and Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 7036–7042. [Google Scholar]
- Olfati-Saber, R. Distributed Kalman filtering for sensor networks. In Proceedings of the IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 5492–5498. [Google Scholar]
- Battistelli, G.; Chisci, L. Kullback–Leibler average, consensus on probability densities, and distributed state estimation with guaranteed stability. Automatica 2014, 50, 707–718. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L. Stability of consensus extended Kalman filter for distributed state estimation. Automatica 2016, 68, 169–178. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Mugnai, G.; Farina, A.; Graziano, A. Consensus-Based Linear and Nonlinear Filtering. IEEE Trans. Autom. Control 2015, 60, 1410–1415. [Google Scholar] [CrossRef]
- Das, S.; Moura, J.M.F. Distributed Kalman Filtering With Dynamic Observations Consensus. IEEE Trans. Signal Process. 2015, 63, 4458–4473. [Google Scholar] [CrossRef]
- Zhou, Z.; Hong, Y.; Fang, H. Distributed estimation for moving target under switching interconnection network. In Proceedings of the International Conference on Control Automation Robotics & Vision, Hanoi, Vietnam, 17–20 December 2012; pp. 1818–1823. [Google Scholar]
- Zhou, Z.; Fang, H.; Hong, Y. Distributed estimation for moving target based on state-consensus strategy. IEEE Trans. Autom. Control 2013, 58, 2096–2101. [Google Scholar] [CrossRef]
- Hlinka, O.; Sluciak, O.; Hlawatsch, F.; Djuric, P.M.; Rupp, M. Likelihood consensus and its application to distributed particle filtering. IEEE Trans. Signal Process. 2012, 60, 4334–4349. [Google Scholar] [CrossRef]
- Jia, B.; Pham, K.D.; Blasch, E.; Shen, D.; Wang, Z.; Chen, G. Cooperative space object tracking using space-based optical sensors via consensus-based filters. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1908–1936. [Google Scholar] [CrossRef]
- García-Fernández, Á.F.; Morelande, M.R.; Grajal, J.; Svensson, L. Adaptive unscented Gaussian likelihood approximation filter. Automatica 2015, 54, 166–175. [Google Scholar] [CrossRef]
- Raitoharju, M.; García-Fernández, Á.F.; Piché, R. Kullback–Leibler divergence approach to partitioned update Kalman filter. Signal Process. 2017, 130, 289–298. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, Y.; Li, X.; Hua, X.; Qin, Y. Information Geometric Approach to Recursive Update in Nonlinear Filtering. Entropy 2017, 19, 54. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, Y.; Li, X.; Wang, H.; Hua, X.; Qin, Y. Bayesian Nonlinear Filtering via Information Geometric Optimization. Entropy 2017, 19, 655. [Google Scholar] [CrossRef]
- Kamal, A.T.; Farrell, J.A.; Roy-Chowdhury, A.K. Information weighted consensus filters and their application in distributed camera networks. IEEE Trans. Autom. Control 2013, 58, 3112–3125. [Google Scholar] [CrossRef]
- Xiao, L.; Boyd, S. Fast linear iterations for distributed averaging. Syst. Control Lett. 2004, 53, 65–78. [Google Scholar] [CrossRef]
- Nielsen, F.; Nock, R. Sided and symmetrized Bregman centroids. IEEE trans. Inf. Theory 2009, 55, 2882–2904. [Google Scholar] [CrossRef]
- Lin, J. Divergence measures based on the Shannon entropy. IEEE Trans. Inf. Theory 1991, 37, 145–151. [Google Scholar] [CrossRef]
- Banerjee, A.; Merugu, S.; Dhillon, I.S.; Ghosh, J. Clustering with Bregman divergences. J. Mach. Learn. Res. 2005, 6, 1705–1749. [Google Scholar]
- Battistelli, G.; Chisci, L.; Selvi, D. Distributed averaging of exponential-class densities with discrete-time event-triggered consensus. IEEE Trans.Control Netw. Syst. 2016. [Google Scholar] [CrossRef]
- Nielsen, F.; Garcia, V. Statistical exponential families: A digest with flash cards. arXiv, 2009; arXiv:0911.4863. [Google Scholar]
- Casella, G.; Berger, R.L. Statistical Inference; Duxbury: Pacific Grove, CA, USA, 2002; Volume 2. [Google Scholar]
- Curtis, H.D. Orbital Mechanics for Engineering Students; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Battistelli, G.; Chisci, L.; Selvi, D. Distributed Kalman filtering with data-driven communication. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 1042–1048. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. A non-divergent estimation algorithm in the presence of unknown correlations. In Proceedings of the 1997 IEEE American Control Conference, Albuquerque, NM, USA, 6 June 1997; Volume 4, pp. 2369–2373. [Google Scholar]
- Chen, L.; Arambel, P.O.; Mehra, R.K. Estimation under unknown correlation: covariance intersection revisited. IEEE Trans. Autom. Control 2002, 47, 1879–1882. [Google Scholar] [CrossRef]
- Nedic, A.; Ozdaglar, A. Distributed subgradient methods for multi-agent optimization. IEEE Trans. Autom. Control 2009, 54, 48–61. [Google Scholar] [CrossRef]
- Cattivelli, F.; Sayed, A. Diffusion strategies for distributed Kalman filtering and smoothing. IEEE Trans. Autom. Control 2010, 55, 2069–2084. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Local estimation: |
|---|
| , |
| , |
| , |
| , ; |
| Consensus: |
| for do |
| , |
| , |
| end for |
| Estimate of sensor i: |
| . |
| Six Orbital Parameter | (km) | e | u (Deg) | (Deg) | (Deg) | (Deg) |
|---|---|---|---|---|---|---|
| Object | 8667.13 | 0 | 73.9116 | 14.108 | 0 | 52.632 |
| Satellite 1 | 9067.13 | 0 | 73.9116 | 128.495 | 0 | 52.942 |
| Satellite 2 | 8067.1 | 0 | 73.9116 | 91.0768 | 0 | 18.88 |
| Satellite 3 | 8667.13 | 0 | 73.9116 | 103.658 | 0 | 44.818 |
| Satellite 4 | 8467.13 | 0 | 73.9116 | 116.24 | 0 | 70.756 |
| Satellite 5 | 8267.13 | 0 | 73.9116 | 88.8216 | 0 | 96.694 |
| Satellite 6 | 9067.13 | 0 | 73.9116 | 88.495 | 0 | 112.942 |
| Filters | DCKF, | DCKF, | DEKF, | DEKF, | DCIF, | DCIF, |
|---|---|---|---|---|---|---|
| Time (s) | 0.2002 | 0.2421 | 0.0428 | 0.0916 | 0.5087 | 0.5827 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, C.; Lin, H.; Li, Z.; He, B.; Liu, G. Kullback–Leibler Divergence Based Distributed Cubature Kalman Filter and Its Application in Cooperative Space Object Tracking. Entropy 2018, 20, 116. https://doi.org/10.3390/e20020116
Hu C, Lin H, Li Z, He B, Liu G. Kullback–Leibler Divergence Based Distributed Cubature Kalman Filter and Its Application in Cooperative Space Object Tracking. Entropy. 2018; 20(2):116. https://doi.org/10.3390/e20020116
Chicago/Turabian StyleHu, Chen, Haoshen Lin, Zhenhua Li, Bing He, and Gang Liu. 2018. "Kullback–Leibler Divergence Based Distributed Cubature Kalman Filter and Its Application in Cooperative Space Object Tracking" Entropy 20, no. 2: 116. https://doi.org/10.3390/e20020116
APA StyleHu, C., Lin, H., Li, Z., He, B., & Liu, G. (2018). Kullback–Leibler Divergence Based Distributed Cubature Kalman Filter and Its Application in Cooperative Space Object Tracking. Entropy, 20(2), 116. https://doi.org/10.3390/e20020116