A Novel Fractional-Order Chaotic Phase Synchronization Model for Visual Selection and Shifting


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Phase Synchronization of Fractional-Order Chaotic Systems
2.1. Fractional-Order Chaotic Network
2.2. Phase Synchronization between the Central System and the Chaotic Network
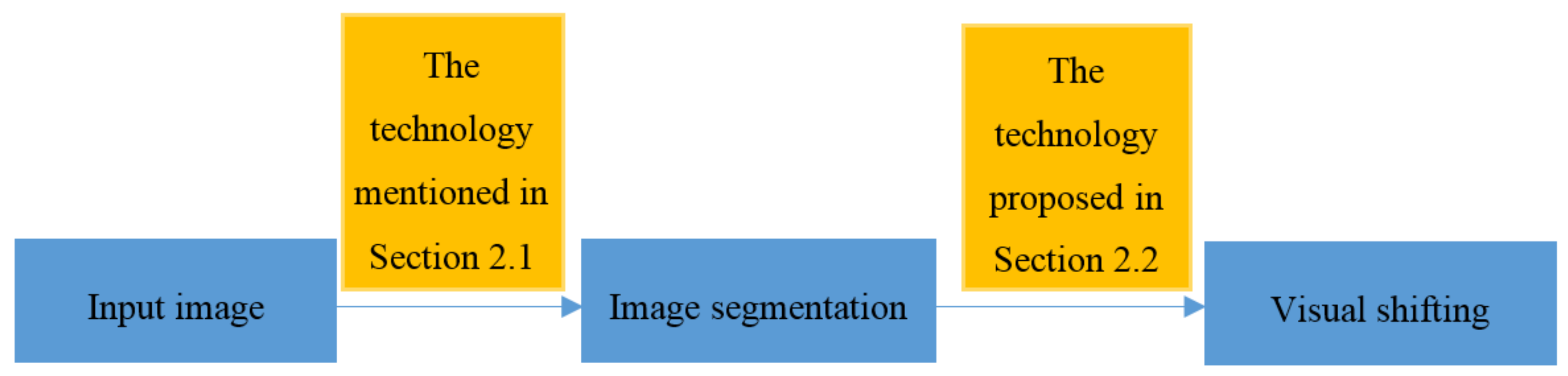
3. Model Description
4. Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Wang, Y. Congnitive informatics: A New Transdiciplinary Research Field. Brain Mind 2003, 4, 115–127. [Google Scholar] [CrossRef]
- Wang, Y. A Cognitive Informatics Theory for Visual Information Processing. In Proceedings of the IEEE International Conference on Cognitive Informatics, Stanford, CA, USA, 14–16 August 2008; pp. 317–323. [Google Scholar]
- Wallace, R. Congnition and Biology: Perspectives from Information Theory. Cognit. Process 2014, 15, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Fries, P.; Reynolds, J.H.; Rorie, A.E.; Desimone, R. Modulation of Oscillatory Neuronal Synchronization by Selective Visual Attention. Science 2001, 291, 1560. [Google Scholar] [CrossRef] [PubMed]
- Saleem, A.B.; Lien, A.D.; Krumin, M.; Haider, B.; Rosón, M.R.; Ayaz, A.; Reinhold, K.; Busse, L.; Carandini, M.; Harris, K.D. Subcortical Source and Modulation of the Narrowband Gamma Oscillation in Mouse Visual Cortex. Neuron 2017, 93, 315–322. [Google Scholar] [CrossRef] [PubMed]
- Gray, C.M.; Konig, P.; Engel, A.K.; Singer, W. Oscillatory Responses in Cat Visual Cortex Exhibit Inter-Columnar Synchronization Which Reflects Global Stimulus Properties. Nature 1989, 338, 334–337. [Google Scholar] [CrossRef] [PubMed]
- Quentin, R.; Chanes, L.; Vernet, M.; Valero-Cabré, A. Fronto-Parietal Anatomical Connections Influence the Modulation of Conscious Visual Perception by High-Beta Frontal Oscillatory Activity. Cereb. Cortex 2015, 25, 2095–2101. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.J.; Grabowecky, M.; Paller, K.A.; Muthu, K.; Suzuki, S. Attention Induces Synchronization-Based Response Gain in Steady-State Visual Evoked Potentials. Nat. Neurosci. 2007, 10, 117–125. [Google Scholar] [PubMed]
- Wang, D. The Time Dimension for Scene Analysis. IEEE Trans. Neural Netw. 2005, 16, 1401–1426. [Google Scholar] [CrossRef] [PubMed]
- Finger, H.; König, P. Phase Synchrony Facilitates Binding and Segmentation of Natural Images in a Coupled Neural Oscillator Network. Front. Comput. Neurosci. 2013, 7, 195. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Li, Y. Fast and Robust Image Segmentation by Small-World Neural Oscillator Networks. Cognit. Neurodyn. 2011, 5, 209–220. [Google Scholar] [CrossRef] [PubMed]
- Steyn, J.S.; Andras, P. Analysis of the Dynamics of Temporal Relationships of Neural Activities Using Optical Imaging Data. J. Comput. Neurosci. 2017, 42, 107–121. [Google Scholar] [CrossRef] [PubMed]
- Quiles, M.G.; Wang, D.; Zhao, L.; Romero, R.A.F.; Huang, D.-S. Selecting Salient Objects in Real Scenes: An Oscillatory Correlation Model. Neural Netw. 2011, 24, 54–64. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Wang, D. A Dynamically Coupled Neural Oscillator Network for Image Segmentation. Neural Netw. 2002, 15, 423–439. [Google Scholar] [CrossRef]
- Zhao, L.; Breve, F.A. Chaotic Synchronization in 2d Lattice for Scene Segmentation. Neurocomputing 2008, 71, 2761–2771. [Google Scholar] [CrossRef]
- Zhao, L.; Cupertino, T.H.; Bertini, J.R., Jr. Chaotic Synchronization in General Network Topology for Scene Segmentation. Neurocomputing 2008, 71, 3360–3366. [Google Scholar] [CrossRef]
- Breve, F.A.; Zhao, L.; Quiles, M.G.; Macau, E.E.N. Chaotic Phase Synchronization and Desynchronization in an Oscillator Network for Object Selection. Neural Netw. 2009, 22, 728–737. [Google Scholar] [CrossRef] [PubMed]
- Doesburg, S.M.; Ward, L.M. Synchronization between Sources: Emerging Methods for Understanding Large-Scale Functional Networks in the Human Brain. In Coordinated Activity in the Brain: Measurements and Relevance to Brain Function and Behavior; Wennberg, V.R., Ed.; Jose luis Perez of Alcoa Inc.: New York, NY, USA, 2009; pp. 25–42. [Google Scholar]
- Varela, F.; Lachaux, J.P.; Rodriguez, E.; Martinerie, J. The Brainweb: Phase Synchronization and Large-Scale Integration. Nat. Rev. Neurosci. 2001, 2, 229–239. [Google Scholar] [CrossRef] [PubMed]
- Roelfsema, P.R.; Lamme, V.A.F.; Spekreijse, H. Object-Based Attention in the Primary Visual Cortex of the Macaque Monkey. Nature 1998, 395, 376–381. [Google Scholar] [CrossRef] [PubMed]
- Richard, A.M.; Lee, H.; Vecera, S.P. Attentional Spreading in Object-Based Attention. J. Exp. Psychol. Hum. Percept. Perform. 2008, 34, 842–853. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Wang, Z.; Lu, J.; Li, Y. Adaptive Synchronization of Fractional-order Complex-Valued Neural Networks with Discrete and Distributed Delays. Entropy 2018, 20, 124. [Google Scholar] [CrossRef]
- Siddique, U.; Hasan, O.; Tahar, S. Towards the Formalization of Fractional Calculus in Higher-Order Logic. In Proceedings of the International Conferences on Intelligent Computer Mathematics, Washington, DC, USA, 13–17 July 2015; Springer International Publishing: Cham, Switzerland, 2015; pp. 316–324. [Google Scholar]
- Alofi, A.; Cao, J.; Elaiw, A.; AL-Mazrooei, A. Delay-Dependent Stability Criterion of Caputo Fractional Neural Networks with Distributed Delay. Discret. Dyn. Nat. Soc 2014, 2014, 529358. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Wen, G.; Zhang, S. Stability Analysis of Fractional-Order Neural Networks with Time Delay. Neural Process. Lett. 2015, 42, 479–500. [Google Scholar] [CrossRef]
- De Carlo, L.; Gentile, G.; Giuliani, A. Construction of the Lyapunov Spectrum in a Chaotic System Displaying Phase Synchronization. Math. Phys. Anal. Geom. 2016, 19, 10. [Google Scholar] [CrossRef]
- Chen, F.; Shao, X.; Sheng, L. Phase Synchronization in Small-World Network Composed of Fractional-Order Chaotic Oscillator. In Proceedings of the International Conference on Advances in Energy, Environment and Chemical Science, Guangzhou, China, 23–24 April 2016; CEC Press: London, UK, 2016; pp. 363–368. [Google Scholar]
- Odibat, Z. A Note on Phase Synchronization in Coupled Chaotic Fractional Order Systems. Nonlinear Anal. Real 2012, 13, 779–789. [Google Scholar] [CrossRef]
- Taghvafard, H.; Erjaee, G.H. Phase and Anti-Phase Synchronization of Fractional Order Chaotic Systems via Active Control. Commun. Nonlinear Sci. 2011, 16, 4079–4088. [Google Scholar] [CrossRef]
- Nian, F.; Liu, W. Hybrid Synchronization of Two Independent Chaotic Systems on Complex Network. Pram. J. Phys. 2016, 86, 1209–1222. [Google Scholar] [CrossRef]
- Nian, F.; Liu, W. Hybrid Synchronization of Heterogeneous Chaotic Systems on Complex Network. Chaos Solition Fract. 2016, 91, 554–561. [Google Scholar] [CrossRef]
- Qiao, Y.; Liu, X.; Miao, J.; Duan, L. A Neural Network Model for Visual Selection and Shifting. J. Integr. Neurosci. 2016, 15, 321–335. [Google Scholar] [CrossRef] [PubMed]
- Vincent, U.E.; Saseyi, A.O.; McClintock, P.V.E. Multi-Switching Combination Synchronization of Chaotic Systems. Nonlinear Dyn. 2015, 80, 845–854. [Google Scholar] [CrossRef] [Green Version]
- Uçar, A.; Lonngren, K.E.; Bai, E.-W. Multi-Switching Synchronization of Chaotic Systems with Active Controllers. Chaos Solition Fract. 2008, 38, 254–262. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour Detection and Hierarchical Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Kazanovich, Y.; Borisyuk, R. Reaction Times in Visual Search Can Be Explained by a Simple Model of Neural Synchronization. Neural Netw. 2017, 87, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Hulleman, J.; Olivers, C.N.L. The Impending Demise of the Item in Visual Search. Behav. Brain Sci. 2017, 40, e132. [Google Scholar] [CrossRef] [PubMed]































© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, X.; Zhou, S.; Tang, H.; Qi, Y.; Xie, X. A Novel Fractional-Order Chaotic Phase Synchronization Model for Visual Selection and Shifting. Entropy 2018, 20, 251. https://doi.org/10.3390/e20040251
Lin X, Zhou S, Tang H, Qi Y, Xie X. A Novel Fractional-Order Chaotic Phase Synchronization Model for Visual Selection and Shifting. Entropy. 2018; 20(4):251. https://doi.org/10.3390/e20040251
Chicago/Turabian StyleLin, Xiaoran, Shangbo Zhou, Hongbin Tang, Ying Qi, and Xianzhong Xie. 2018. "A Novel Fractional-Order Chaotic Phase Synchronization Model for Visual Selection and Shifting" Entropy 20, no. 4: 251. https://doi.org/10.3390/e20040251
APA StyleLin, X., Zhou, S., Tang, H., Qi, Y., & Xie, X. (2018). A Novel Fractional-Order Chaotic Phase Synchronization Model for Visual Selection and Shifting. Entropy, 20(4), 251. https://doi.org/10.3390/e20040251