Wall-Normal Variation of Spanwise Streak Spacing in Turbulent Boundary Layer With Low-to-Moderate Reynolds Number


Abstract
:1. Introduction
2. Description of the PIV/DNS Dataset
2.1. Experiment Facilities and PIV Measurement Details
2.2. DNS Dataset
3. Existence of Small-Scale Streak in Higher Layer
4. Streak Spacing Based on Morphological Identification
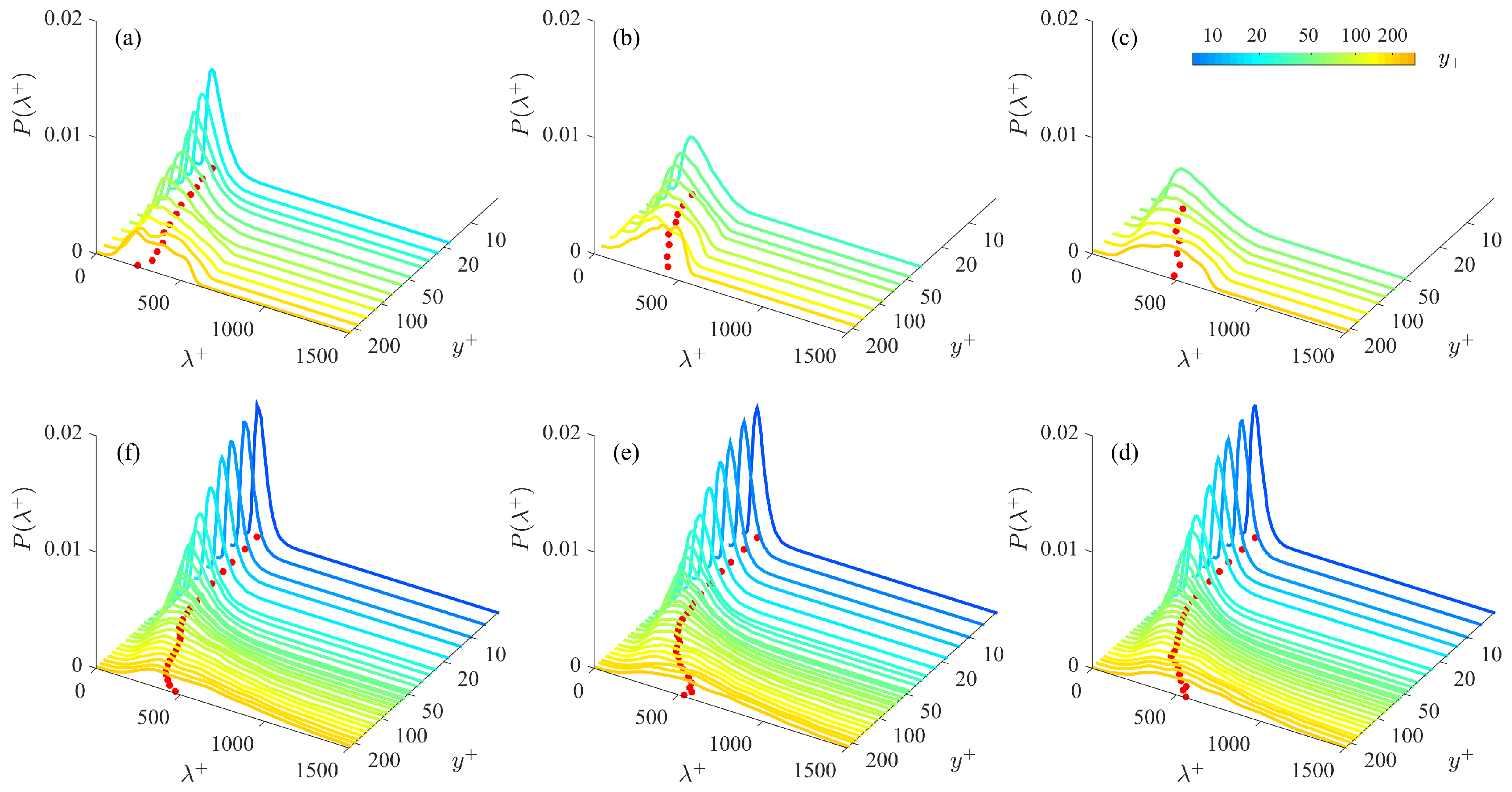
4.1. Streak Spacing Distribution
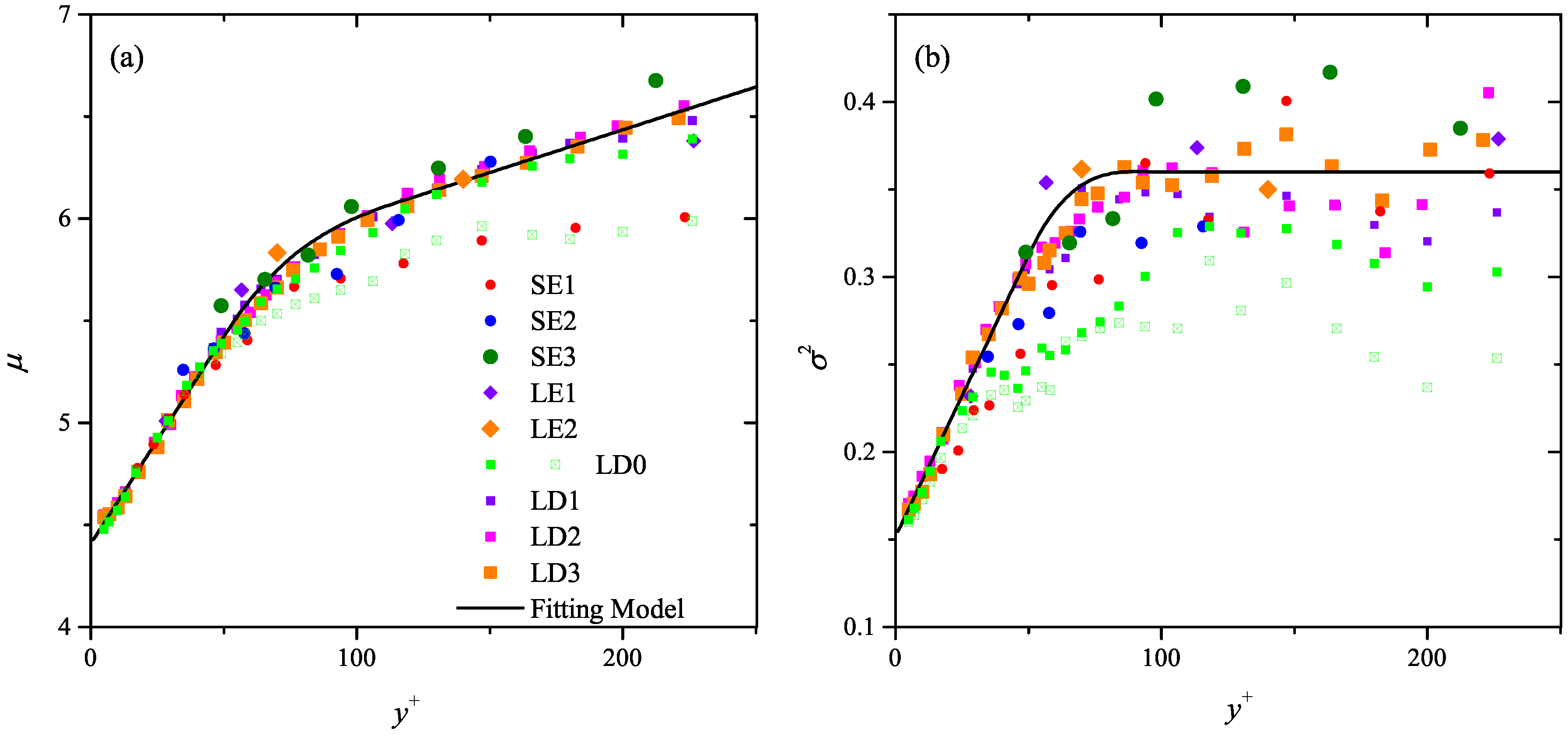
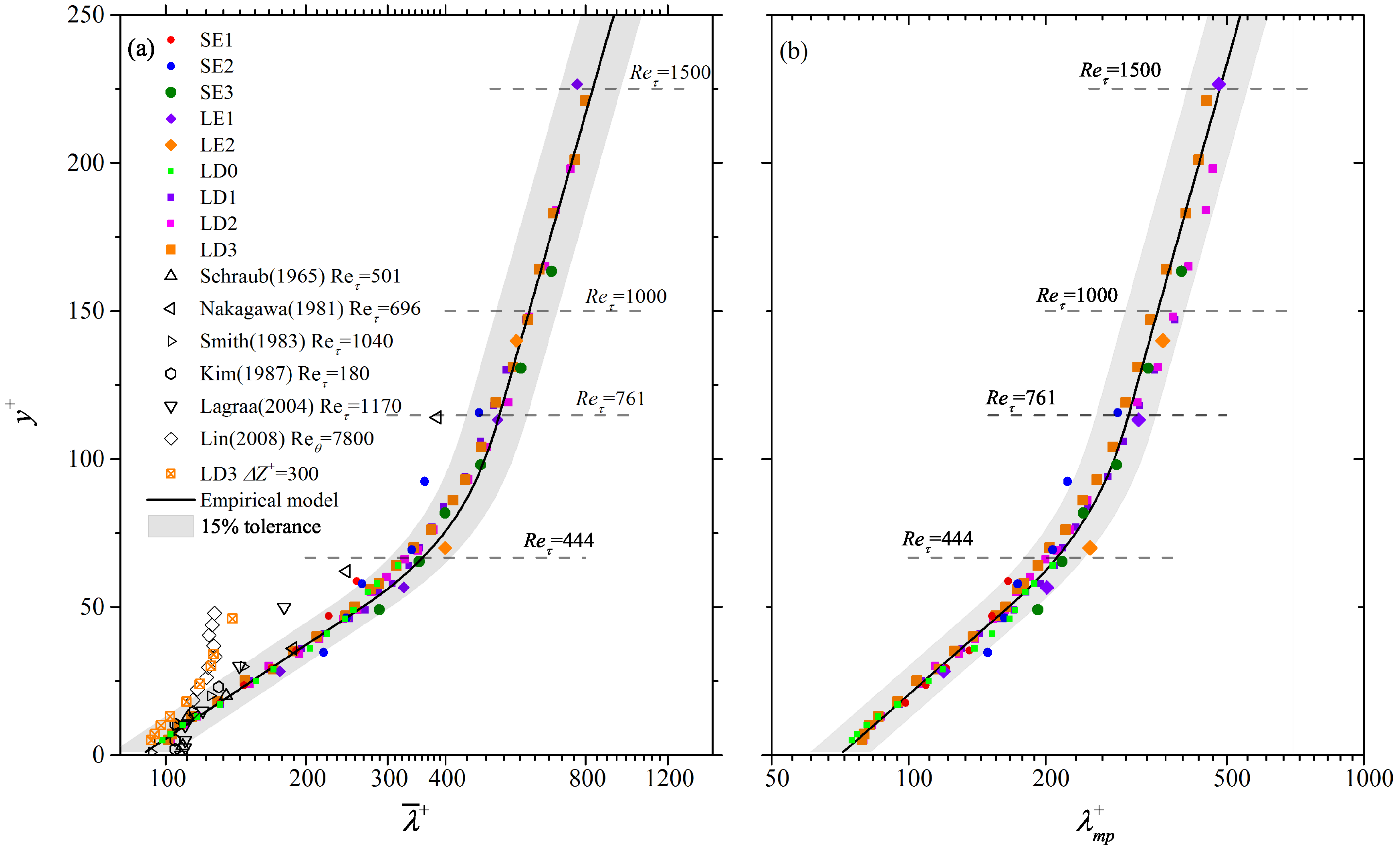
4.2. An Empirical Model for Streak Spacing
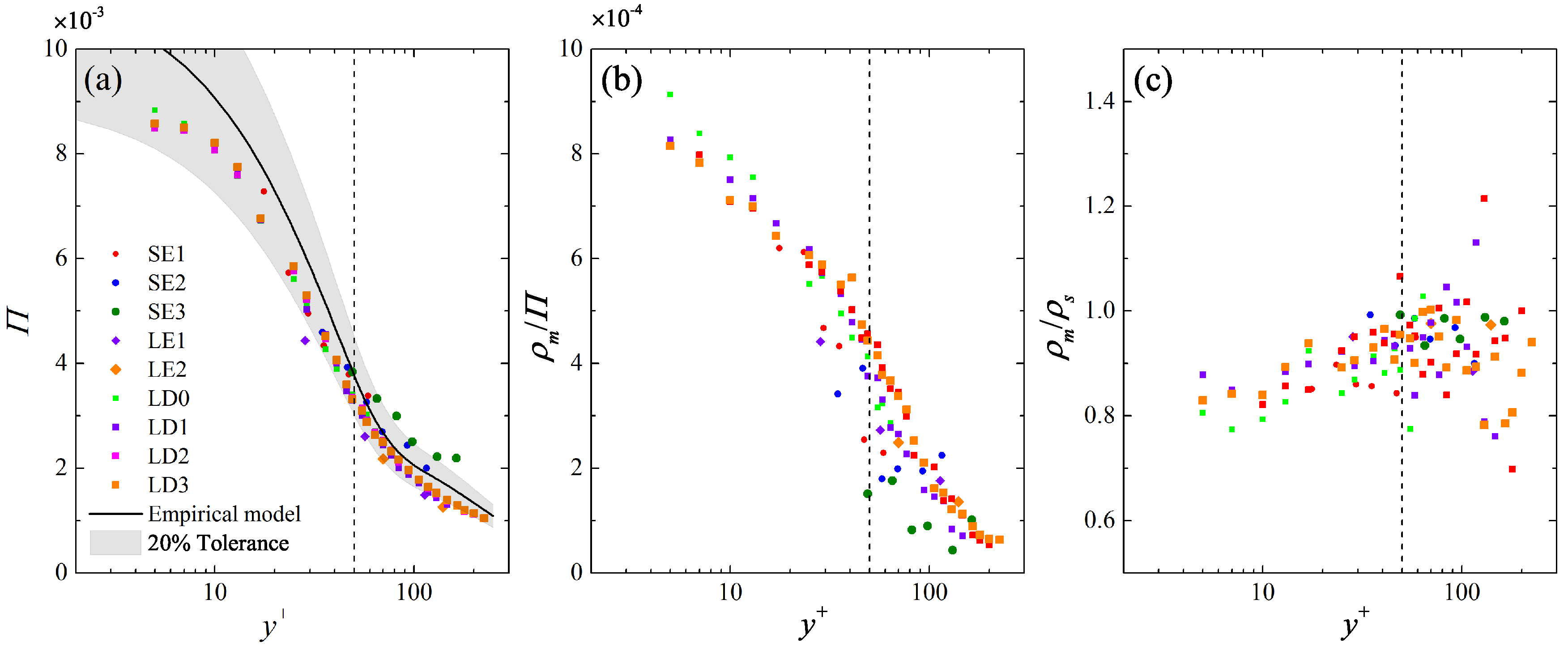
4.3. Discussion on the Empirical Model for Streak Spacing
5. Synthetic Simulation of the Spanwise Spectra
6. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Scale and Mode Shape of POD Modes


Appendix B. Morphological-Based Streak Identification Algorithm
Appendix B.1. Algorithm Description

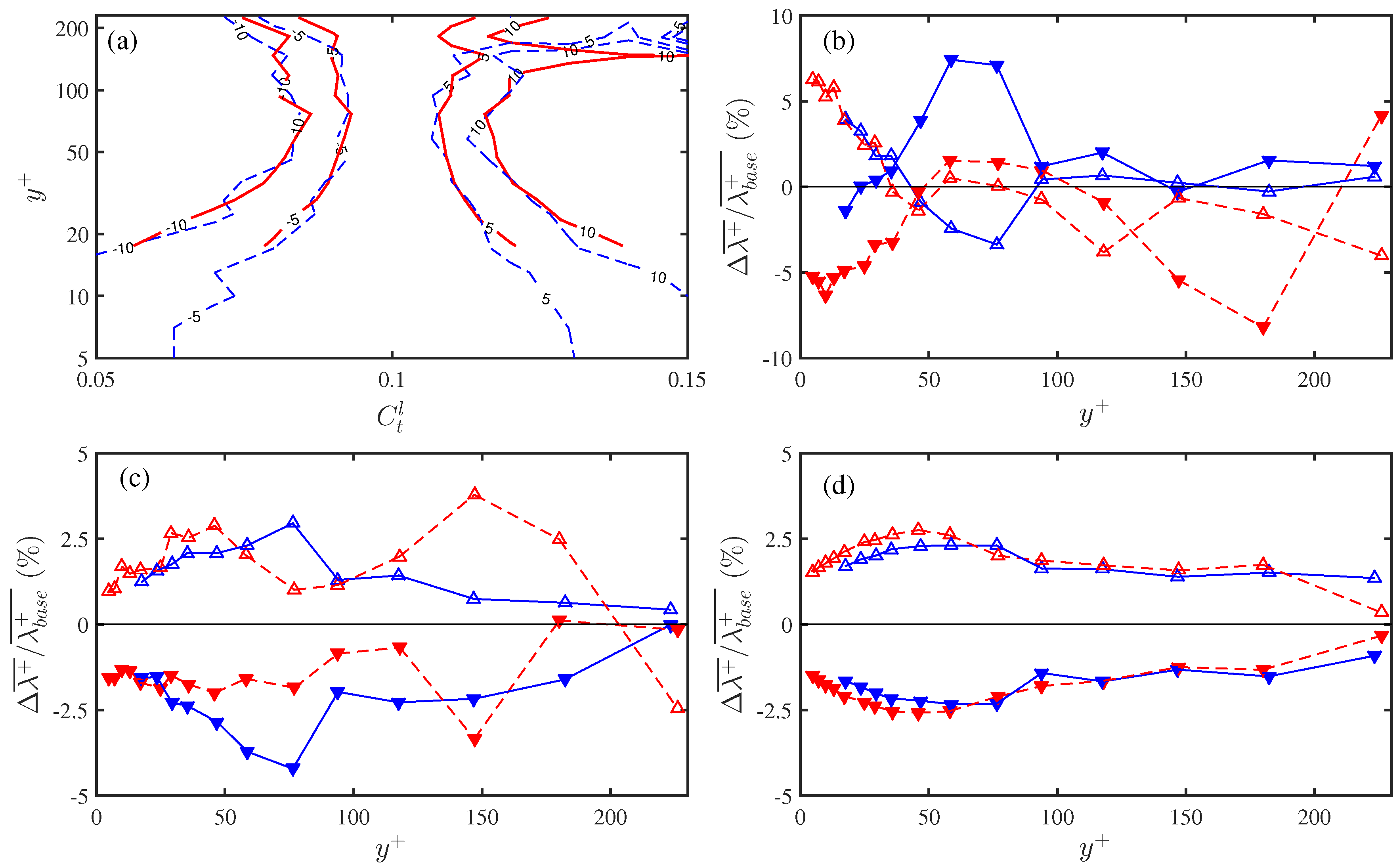
Appendix B.2. Effect of Algorithm Parameters on the Streak Spacing Statistics

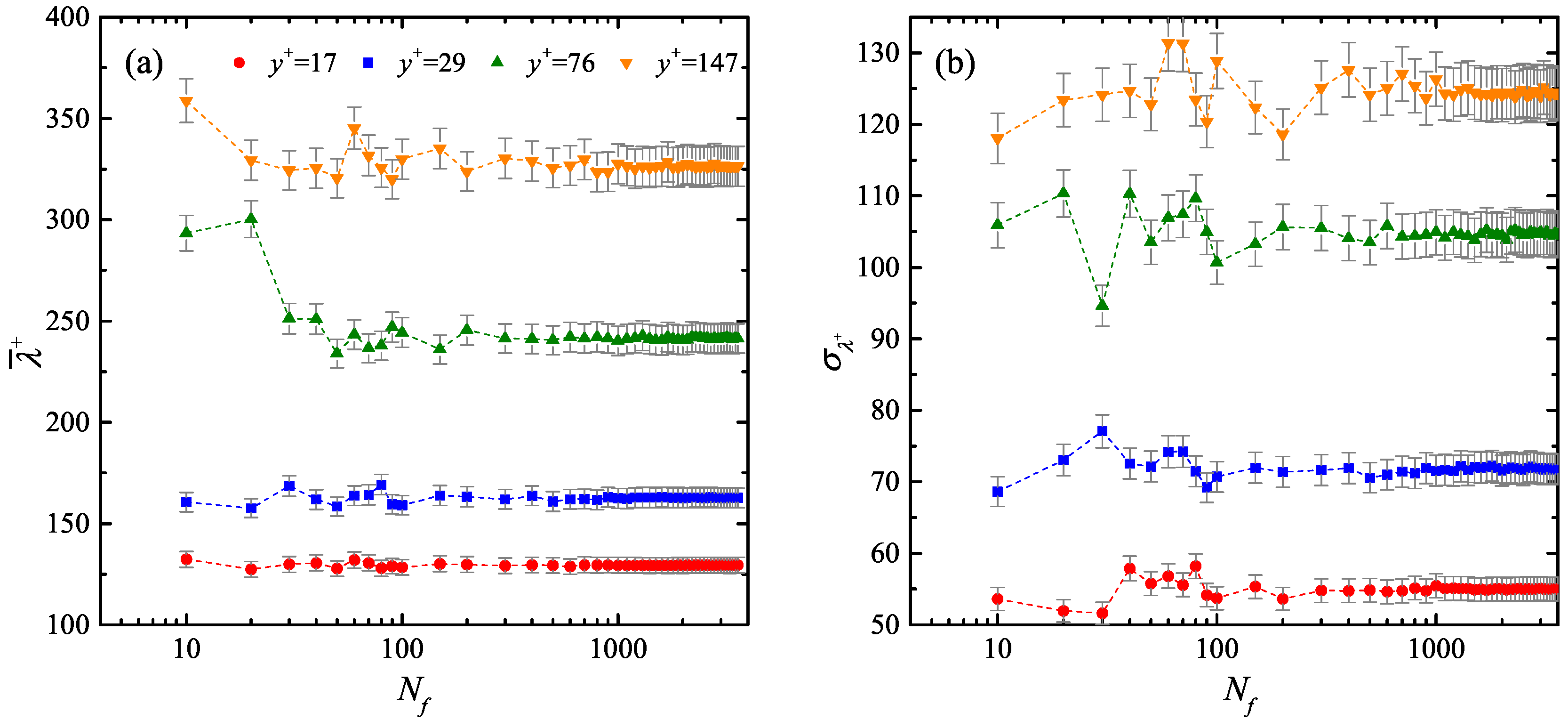
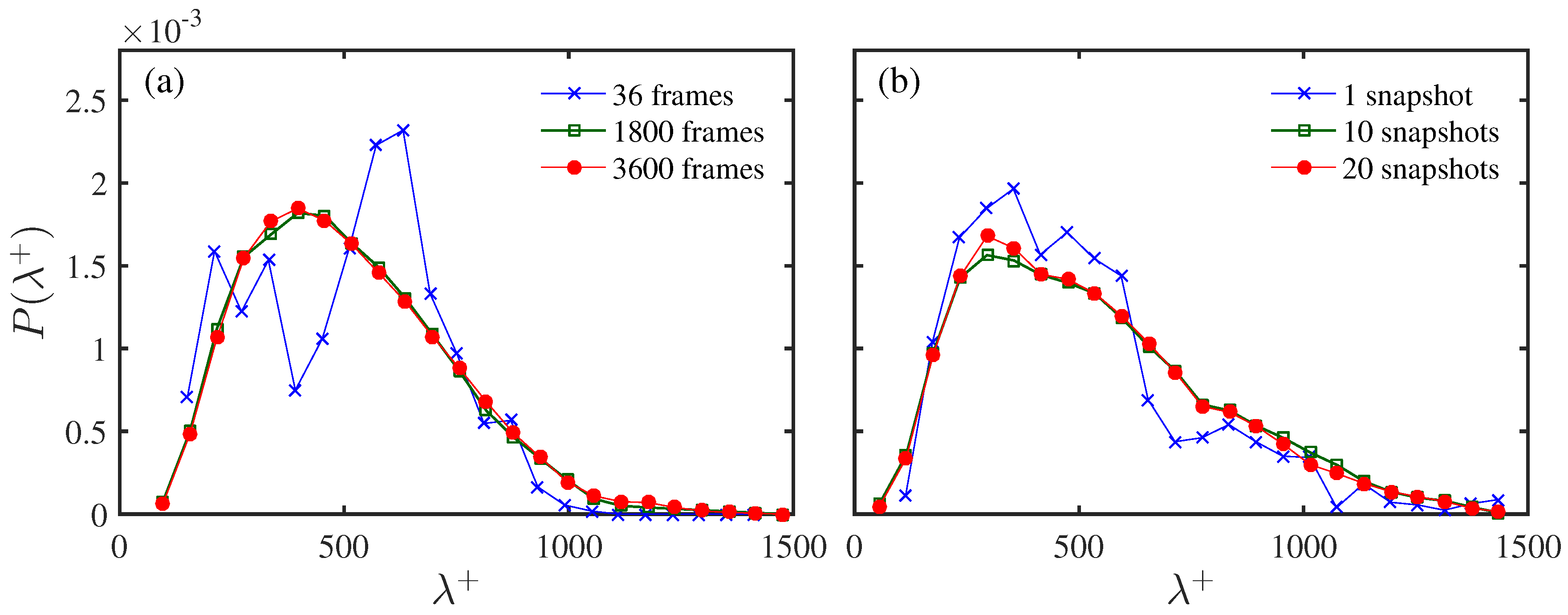
Appendix B.3. Effect of Ensemble Size on the Streak Spacing Statistics


References
- Hama, F.R.; Nutant, J. Detailed flow-field observations in the transition process in a thick boundary layer. In Proceedings of the Heat Transfer and Fluid Mechanics Institute; Stanford University Press: Palo Alto, CA, USA, 1954; Volume 16, p. 77. [Google Scholar]
- Ferrell, J.K.; Richardson, F.M.; Beatty, K.O., Jr. Dye displacement technique for velocity distribution measurements. Ind. Eng. Chem. 1955, 47, 29–33. [Google Scholar] [CrossRef]
- Jeong, J.; Hussain, F.; Schoppa, W.; Kim, J. Coherent structures near the wall in a turbulent channel flow. J. Fluid Mech. 1997, 332, 185–214. [Google Scholar] [CrossRef]
- Schoppa, W.; Hussain, F. Coherent structure generation in near-wall turbulence. J. Fluid Mech. 2002, 453, 57–108. [Google Scholar] [CrossRef] [Green Version]
- Blackwelder, R.F.; Eckelmann, H. Streamwise vortices associated with the bursting phenomenon. J. Fluid Mech. 1979, 94, 577–594. [Google Scholar] [CrossRef]
- Smith, C.R.; Schwartz, S.P. Observation of streamwise rotation in the near-wall region of a turbulent boundary layer. Phys. Fluids 1983, 26, 641–652. [Google Scholar] [CrossRef]
- Kasagi, N.; Hirata, M.; Nishino, K. Streamwise pseudo-vortical structures and associated vorticity in the near-wall region of a wall-bounded turbulent shear flow. Exp. Fluids 1986, 4, 309–318. [Google Scholar] [CrossRef]
- Hwang, Y. Near-wall turbulent fluctuations in the absence of wide outer motions. J. Fluid Mech. 2013, 723, 264–288. [Google Scholar] [CrossRef] [Green Version]
- Brandt, L. The lift-up effect: The linear mechanism behind transition and turbulence in shear flows. Eur. J. Mech. B Fluids 2014, 47, 80–96. [Google Scholar] [CrossRef] [Green Version]
- Landahl, M.T. On sublayer streaks. J. Fluid Mech. 1990, 212, 593–614. [Google Scholar] [CrossRef]
- Del Álamo, J.C.; Jiménez, J. Linear energy amplification in turbulent channels. J. Fluid Mech. 2006, 559, 205–213. [Google Scholar] [CrossRef]
- Hwang, Y.; Cossu, C. Self-sustained process at large scales in turbulent channel flow. Phys. Rev. Lett. 2010, 105, 044505. [Google Scholar] [CrossRef] [PubMed]
- Butler, K.M.; Farrell, B.F. Three-dimensional optimal perturbations in viscous shear flow. Phys. Fluids A 1992, 4, 1637–1650. [Google Scholar] [CrossRef]
- Trefethen, L.N.; Trefethen, A.E.; Reddy, S.C.; Driscoll, T.A. Hydrodynamic stability without eigenvalues. Science 1993, 261, 578–584. [Google Scholar] [CrossRef] [PubMed]
- Reddy, S.C.; Henningson, D.S. Energy growth in viscous channel flows. J. Fluid Mech. 1993, 252, 209–238. [Google Scholar] [CrossRef]
- Willis, A.P.; Hwang, Y.; Cossu, C. Optimally amplified large-scale streaks and drag reduction in turbulent pipe flow. Phys. Rev. E 2010, 82, 036321. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, J.M.; Kim, J.; Waleffe, F. Regeneration mechanisms of near-wall turbulence structures. J. Fluid Mech. 1995, 287, 317–348. [Google Scholar] [CrossRef]
- Waleffe, F. On a self-sustaining process in shear flows. Phys. Fluids 1997, 9, 883–900. [Google Scholar] [CrossRef]
- Jiménez, J.; Pinelli, A. The autonomous cycle of near-wall turbulence. J. Fluid Mech. 1999, 389, 335–359. [Google Scholar] [CrossRef]
- Kim, J. Physics and control of wall turbulence for drag reduction. Philos. Trans. Math. Phys. Eng. Sci. 2011, 369, 1396–1411. [Google Scholar] [CrossRef] [Green Version]
- Rao, K.N.; Narasimha, R.; Narayanan, M.A.B. The ‘bursting’ phenomenon in a turbulent boundary layer. J. Fluid Mech. 1971, 48, 339–352. [Google Scholar] [CrossRef]
- Kim, H.; Kline, S.J.; Reynolds, W.C. The production of turbulence near a smooth wall in a turbulent boundary layer. J. Fluid Mech. 1971, 50, 133–160. [Google Scholar] [CrossRef]
- Hwang, Y.; Bengana, Y. Self-sustaining process of minimal attached eddies in turbulent channel flow. J. Fluid Mech. 2016, 795, 708–738. [Google Scholar] [CrossRef] [Green Version]
- Bogard, D.G.; Tiederman, W.G. Characteristics of ejections in turbulent channel flow. J. Fluid Mech. 1987, 179, 1–19. [Google Scholar] [CrossRef]
- Asai, M.; Minagawa, M.; Nishioka, M. The instability and breakdown of a near-wall low-speed streak. J. Fluid Mech. 2002, 455, 289–314. [Google Scholar] [CrossRef]
- Brandt, L.; de Lange, H.C. Streak interactions and breakdown in boundary layer flows. Phys. Fluids 2008, 20, 024107. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.J.; Pan, C.; Zhang, P.F. On the instability and reproduction mechanism of a laminar streak. J. Turb. 2009, 10, N26. [Google Scholar] [CrossRef]
- Hwang, Y.; Willis, A.P.; Cossu, C. Invariant solutions of minimal large-scale structures in turbulent channel flow for Reτ up to 1000. J. Fluid Mech. 2016, 802, R1. [Google Scholar] [CrossRef]
- Kline, S.; Reynolds, W.; Schraub, F.; Runstadler, P. The structure of turbulent boundary layers. J. Fluid Mech. 1967, 30, 741–773. [Google Scholar] [CrossRef]
- Smith, C.; Metzler, S. The characteristics of low-speed streaks in the near-wall region of a turbulent boundary layer. J. Fluid Mech. 1983, 129, 27–54. [Google Scholar] [CrossRef]
- Runstadler, P.W.; Kline, S.J.; Reynolds, W.C. An Experimental Investigation of the Flow Structure of the Turbulent Boundary Layer; Technical Report MD-8; Department of Mechanical Engineering, Stanford University: Stanford, CA, USA, 1963. [Google Scholar]
- Coantic, M. A study of turbulent pipe fow and of the structure of its viscous sublayer. In Proceedings of the 4th Euromech Colloquium, Southampton, UK, March 1967. [Google Scholar]
- Gupta, A.; Laufer, J.; Kaplan, R. Spatial structure in the viscous sublayer. J. Fluid Mech. 1971, 50, 493–512. [Google Scholar] [CrossRef]
- Lee, M.K.; Eckelman, L.D.; Hanratty, T.J. Identification of turbulent wall eddies through the phase relation of the components of the fluctuating velocity gradient. J. Fluid Mech. 1974, 66, 17–33. [Google Scholar] [CrossRef]
- Klewicki, J.C.; Metzger, M.M.; Kelner, E.; Thurlow, E.M. Viscous sublayer flow visualizations at Reθ = 1,500,000. Phys. Fluids 1995, 7, 857–863. [Google Scholar] [CrossRef]
- Nakagawa, H.; Nezu, I. Structure of space-time correlations of bursting phenomena in an open-channel flow. J. Fluid Mech. 1981, 104, 1–43. [Google Scholar] [CrossRef]
- Jiménez, J.; Moin, P. The minimal flow unit in near-wall turbulence. J. Fluid Mech. 1991, 225, 213–240. [Google Scholar] [CrossRef]
- Jiménez, J.; Del Álamo, J.C.; Flores, O. The large-scale dynamics of near-wall turbulence. J. Fluid Mech. 2004, 505, 179–199. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.C.; Adrian, R.J. Very large-scale motion in the outer layer. Phys. Fluids 1999, 11, 417–422. [Google Scholar] [CrossRef]
- Adrian, R.J.; Meinhart, C.D.; Tomkins, C.D. Vortex organization in the outer region of the turbulent boundary layer. J. Fluid Mech. 2000, 422, 1–54. [Google Scholar] [CrossRef]
- Tomkins, C.D.; Adrian, R.J. Spanwise structure and scale growth in turbulent boundary layers. J. Fluid Mech. 2003, 490, 37–74. [Google Scholar] [CrossRef] [Green Version]
- Ganapathisubramani, B.; Longmire, E.K.; Marusic, I. Characteristics of vortex packets in turbulent boundary layers. J. Fluid Mech. 2003, 478, 35–46. [Google Scholar] [CrossRef]
- Hutchins, N.; Marusic, I. Evidence of very long meandering features in the logarithmic region of turbulent boundary layers. J. Fluid Mech. 2007, 579, 1–28. [Google Scholar] [CrossRef]
- Balakumar, B.J.; Adrian, R.J. Large- and very-large-scale motions in channel and boundary-layer flows. Philos. Trans. Math. Phys. Eng. Sci. 2007, 365, 665–681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Christensen, K.T. Spatial structure of a turbulent boundary layer with irregular surface roughness. J. Fluid Mech. 2010, 655, 380–418. [Google Scholar] [CrossRef]
- Dennis, D.J.C.; Nickels, T.B. Experimental measurement of large-scale three-dimensional structures in a turbulent boundary layer. Part 2. Long structures. J. Fluid Mech. 2011, 673, 218–244. [Google Scholar] [CrossRef]
- Lee, J.H.; Sung, H.J. Very-large-scale motions in a turbulent boundary layer. J. Fluid Mech. 2011, 673, 80–120. [Google Scholar]
- Lee, J.; Lee, J.H.; Choi, J.I.; Sung, H.J. Spatial organization of large- and very-large-scale motions in a turbulent channel flow. J. Fluid Mech. 2014, 749, 818–840. [Google Scholar] [CrossRef]
- de Giovanetti, M.; Hwang, Y.; Choi, H. Skin-friction generation by attached eddies in turbulent channel flow. J. Fluid Mech. 2016, 808, 511–538. [Google Scholar]
- Marusic, I.; Mckeon, B.J.; Monkewitz, P.A.; Nagib, H.M.; Smits, A.J.; Sreenivasan, K.R. Wall-bounded turbulent flows at high reynolds numbers: Recent advances and key issues. Phys. Fluids 2010, 22, 065103. [Google Scholar]
- Smits, A.J.; Mckeon, B.J.; Marusic, I. High-Reynolds number wall turbulence. Annu. Rev. Fluid Mech. 2011, 43, 353–375. [Google Scholar] [CrossRef]
- Bradshaw, P.; Langer, C.A. Nonuniversality of sublayer streaks in turbulent flow. Phys. Fluids 1995, 7, 2435–2438. [Google Scholar] [CrossRef]
- Hutchins, N.; Marusic, I. Large-scale influences in near-wall turbulence. Philos. Trans. Math. Phys. Eng. Sci. 2007, 365, 647–664. [Google Scholar] [Green Version]
- Mathis, R.; Hutchins, N.; Marusic, I. Large-scale amplitude modulation of the small-scale structures in turbulent boundary layers. J. Fluid Mech. 2009, 628, 311–337. [Google Scholar] [CrossRef]
- Marusic, I.; Mathis, R.; Hutchins, N. Predictive model for wall-bounded turbulent flow. Science 2010, 329, 193–196. [Google Scholar] [CrossRef] [PubMed]
- Mathis, R.; Hutchins, N.; Marusic, I. A predictive inner–outer model for streamwise turbulence statistics in wall-bounded flows. J. Fluid Mech. 2011, 681, 537–566. [Google Scholar] [CrossRef]
- Ganapathisubramani, B.; Hutchins, N.; Monty, J.P.; Chung, D.; Marusic, I. Amplitude and frequency modulation in wall turbulence. J. Fluid Mech. 2012, 712, 61–91. [Google Scholar] [CrossRef]
- Duvvuri, S.; Mckeon, B.J. Triadic scale interactions in a turbulent boundary layer. J. Fluid Mech. 2015, 767, R4. [Google Scholar] [CrossRef]
- Agostini, L.; Leschziner, M. Predicting the response of small-scale near-wall turbulence to large-scale outer motions. Phys. Fluids 2016, 28, 015107. [Google Scholar] [CrossRef] [Green Version]
- Hoyas, S.; Jiménez, J. Scaling of the velocity fluctuations in turbulent channels up to Reτ = 2003. Phys. Fluids 2006, 18, 011702. [Google Scholar] [CrossRef]
- Jiménez, J.; Hoyas, S. Turbulent fluctuations above the buffer layer of wall-bounded flows. J. Fluid Mech. 2008, 611, 215–236. [Google Scholar] [CrossRef]
- Townsend, A.A. The Structure of Turbulent Shear Flow; Cambridge University Press: Cambridge, UK, 1976; pp. 411–412. [Google Scholar]
- Perry, A.E.; Chong, M.S. On the mechanism of wall turbulence. J. Fluid Mech. 1982, 119, 173–217. [Google Scholar] [CrossRef]
- Perry, A.E.; Marusic, I. A wall-wake model for the turbulence structure of boundary layers. Part 1. Extension of the attached eddy hypothesis. J. Fluid Mech. 1995, 298, 361–388. [Google Scholar] [CrossRef]
- Marusic, I.; Perry, A.E. A wall-wake model for the turbulence structure of boundary layers. Part 2. Further experimental support. J. Fluid Mech. 1995, 298, 389–407. [Google Scholar] [CrossRef]
- Marusic, I. On the role of large-scale structures in wall turbulence. Phys. Fluids 2001, 13, 735–743. [Google Scholar] [CrossRef]
- Hwang, Y. Statistical structure of self-sustaining attached eddies in turbulent channel flow. J. Fluid Mech. 2015, 767, 254–289. [Google Scholar] [CrossRef] [Green Version]
- Baars, W.J.; Hutchins, N.; Marusic, I. Self-similarity of wall-attached turbulence in boundary layers. J. Fluid Mech. 2017, 823. [Google Scholar] [CrossRef]
- Walsh, M.J. Riblets as a viscous drag reduction technique. AIAA J. 1983, 21, 485–486. [Google Scholar] [CrossRef]
- Fransson, J.H.M.; Talamelli, A. On the generation of steady streamwise streaks in flat-plate boundary layers. J. Fluid Mech. 2012, 698, 211–234. [Google Scholar] [CrossRef]
- Bai, H.; Zhou, Y.; Zhang, W.; Xu, S.; Wang, Y.; Antonia, R. Active control of a turbulent boundary layer based on local surface perturbation. J. Fluid Mech. 2014, 750, 316–354. [Google Scholar] [CrossRef]
- Schraub, F.A.; Kline, S.J. A Study of the Structure of the Turbulent Boundary Layer With And Without Longitudinal Pressure Gradients; Technical Report MD-12; Department of Mechanical Engineering, Stanford University: Stanford, CA, USA, 1965. [Google Scholar]
- Bakewell, H.P., Jr.; Lumley, J.L. Viscous sublayer and adjacent wall region in turbulent pipe flow. Phys. Fluids 1967, 10, 1880–1889. [Google Scholar] [CrossRef]
- Kim, J.; Moin, P.; Moser, R. Turbulence statistics in fully developed channel flow at low reynolds number. J. Fluid Mech. 1987, 177, 133–166. [Google Scholar] [CrossRef]
- Lagraa, B.; Labraga, L.; Mazouz, A. Characterization of low-speed streaks in the near-wall region of a turbulent boundary layer. Eur. J. Mech. B Fluids 2004, 23, 587–599. [Google Scholar] [CrossRef]
- Lin, J.; Laval, J.P.; Foucaut, J.M.; Stanislas, M. Quantitative characterization of coherent structures in the buffer layer of near-wall turbulence. Part 1: Streaks. Exp. Fluids 2008, 45, 999–1013. [Google Scholar] [CrossRef]
- Chen, J.; Hussain, F.; Pei, J.; She, Z.S. Velocity–Vorticity Correlation Structure in Turbulent Channel Flow. J. Fluid Mech. 2014, 742, 291–307. [Google Scholar] [CrossRef]
- Toh, S.; Itano, T. Interaction between a large-scale structure and near-wall structures in channel flow. J. Fluid Mech. 2005, 524, 249–262. [Google Scholar] [CrossRef]
- Wang, W.; Pan, C.; Wang, J. Quasi-bivariate variational mode decomposition as a tool of scale analysis in wall-bounded turbulence. Exp. Fluids 2018, 59, 1. [Google Scholar] [CrossRef]
- Harun, Z.; Monty, J.P.; Mathis, R.; Marusic, I. Pressure gradient effects on the large-scale structure of turbulent boundary layers. J. Fluid Mech. 2013, 715, 477–498. [Google Scholar] [CrossRef]
- Pope, S.B.; Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000; p. 806. [Google Scholar]
- Marusic, I.; Monty, J.P.; Hultmark, M.; Smits, A.J. On the logarithmic region in wall turbulence. J. Fluid Mech. 2013, 716, R3. [Google Scholar] [CrossRef]
- Marusic, I.; Kunkel, G.J. Streamwise turbulence intensity formulation for flat-plate boundary layers. Phys. Fluids 2003, 15, 2461–2464. [Google Scholar] [CrossRef]
- Chauhan, K.A.; Monkewitz, P.A.; Nagib, H.M. Criteria for assessing experiments in zero pressure gradient boundary layers. Fluid Dyn. Res. 2009, 41, 021404. [Google Scholar] [CrossRef]
- Jiménez, J.; Hoyas, S.; Simens, M.P.; Mizuno, Y. Turbulent boundary layers and channels at moderate reynolds numbers. J. Fluid Mech. 2010, 657, 335–360. [Google Scholar] [CrossRef]
- Meneveau, C.; Marusic, I. Generalized logarithmic law for high-order moments in turbulent boundary layers. J. Fluid Mech. 2013, 719, R1. [Google Scholar] [CrossRef]
- Wu, Y. A study of energetic large-scale structures in turbulent boundary layer. Phys. Fluids 2014, 26, 045113. [Google Scholar] [CrossRef]
- Meneveau, C.; Marusic, I. Turbulence in the Era of Big Data: Recent Experiences with Sharing Large Datasets. In Whither Turbulence and Big Data in the 21st Century? Springer International Publishing: Cham, Switzerland, 2017; pp. 497–507. [Google Scholar]
- Simens, M.P.; Jiménez, J.; Hoyas, S.; Mizuno, Y. A High-Resolution Code For Turbulent Boundary Layers. J. Comput. Phys. 2009, 228, 4218–4231. [Google Scholar] [CrossRef]
- Sillero, J.A.; Jiménez, J.; Moser, R.D. One-point statistics for turbulent wall-bounded flows at reynolds numbers up to δ+ ≈ 2000. Phys. Fluids 2013, 25, 105102. [Google Scholar] [CrossRef]
- Sillero, J.A.; Jiménez, J.; Moser, R.D. Two-point statistics for turbulent boundary layers and channels at reynolds numbers up to δ+ ≈ 2000. Phys. Fluids 2014, 26, 105109. [Google Scholar] [CrossRef]
- Champagnat, F.; Plyer, A.; Le Besnerais, G.; Leclaire, B.; Davoust, S.; Le Sant, Y. Fast and accurate PIV computation using highly parallel iterative correlation maximization. Exp. Fluids 2011, 50, 1169–1182. [Google Scholar] [CrossRef]
- Pan, C.; Xue, D.; Xu, Y.; Wang, J.; Wei, R. Evaluating the accuracy performance of Lucas-Kanade algorithm in the circumstance of PIV application. Sci. China Phys. Mech. Astron. 2015, 58, 104704. [Google Scholar] [CrossRef]
- Klewicki, J.; Fife, P.; Wei, T. On the logarithmic mean profile. J. Fluid Mech. 2009, 638, 73–93. [Google Scholar] [CrossRef]
- Borrell, G.; Sillero, J.A.; Jiménez, J. A code for direct numerical simulation of turbulent boundary layers at high reynolds numbers in Bg/P supercomputers. Comput. Fluids 2013, 80, 37–43. [Google Scholar] [CrossRef]
- Agostini, L.; Leschziner, M.; Gaitonde, D. Skewness-induced asymmetric modulation of small-scale turbulence by large-scale structures. Phys. Fluids 2016, 28, 903–995. [Google Scholar] [CrossRef]
- Deng, S.; Pan, C.; Wang, J.; He, G. On the spatial organization of hairpin packets in a turbulent boundary layer at low-to-moderate Reynolds number. J. Fluid Mech. 2018, 844, 635–668. [Google Scholar] [CrossRef]
- Sirovich, L. Turbulence and the dynamics of coherent structures. I—Coherent structures. II—Symmetries and transformations. III—Dynamics and scaling. Q. Appl. Math. 1987, 45, 561–571. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J.L. The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Bourgeois, J.A.; Noack, B.R.; Martinuzzi, R.J. Generalized phase average with applications to sensor-based flow estimation of the wall-mounted square cylinder wake. J. Fluid Mech. 2013, 736, 316–350. [Google Scholar] [CrossRef]
- Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Natl. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef] [PubMed]
- Yin, G.; Huang, W.X.; Xu, C.X. Prediction of near-wall turbulence using minimal flow unit. J. Fluid Mech. 2018, 841, 654–673. [Google Scholar] [CrossRef]
- Zhang, C.; Chernyshenko, S.I. Quasisteady quasihomogeneous description of the scale interactions in near-wall turbulence. Phys. Rev. Fluids 2016, 1, 014401. [Google Scholar] [CrossRef]
- Baltzer, J.R.; Adrian, R.J.; Wu, X. Structural organization of large and very large scales in turbulent pipe flow simulation. J. Fluid Mech. 2013, 720, 236–279. [Google Scholar] [CrossRef]
- Arcelli, C.; Di Baja, G.S. Skeletons of planar patterns. Mach. Intell. Pattern Recognit. 1996, 19, 99–143. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Studies | Flow Type | Distribution | Method | ||||
|---|---|---|---|---|---|---|---|
| Coantic [32] | Pipe flow | 2500 () | 110–130 | − | − | Hot-wire with correlation analysis | |
| Schraub and Kline [72] | Boundary layer | 501 | − | − | Dye and bubble visualization | ||
| Kline et al. [29] | Boundary layer | 431, 501 | 91, 106 | 500 | − | Dye and bubble visualization | |
| Bakewell Jr and Lumley [73] | Boundary layer | ∼239 | 0–7 | 80–100 | − | − | Hot-wire with space-time correlation |
| Gupta et al. [33] | Boundary layer | 870–2160 | 3.4–10.8 | 97.5–151.2 | 373 | − | Hot-wire with short duration correlation |
| Lee et al. [34] | Pipe flow | 1735–2045 () | 105-107 | 250 | Lognormal | Electrochemical measurement with spatial correlation | |
| Nakagawa and Nezu [36] | Channel flow | 318, 696 | 10–100 | 100–1000 | 3000 | Lognormal | Hot-wire with conditional correlation |
| Smith and Metzler [30] | Boundary layer | 1040 | 1–30 | 93–146 | 1000 | Lognormal | Hydrogen bubbles visualization |
| Kim et al. [74] | Channel flow | 180 | 1–23 | 100–125 | 1150 | − | Averaged correlation |
| Klewicki et al. [35] | Atmospheric surface layer | 93.1 | − | − | Fog visualization | ||
| Lagraa et al. [75] | Boundary layer | 1170 | 0–50 | 100–180 | 216 | − | Electrochemical measurement with space-time correlation |
| Lin et al. [76] | Boundary layer | 7800 () | 15–50 | 110–120 | 320 | Rayleigh | Stereo-PIV with morphological analysis |
| Cases | H | FOV | Spatial Res. | Marker | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| (mm/s) | (mm) | (mm/s) | ||||||||
| SE1 | 146 | 908 | 75.5 | 1.46 | 6.7 | 444 | 6 × 6 | 43 | ||
| SE2 | 299 | 2044 | 65.8 | 1.39 | 13.1 | 761 | 5 × 5 | 97 | ||
| SE3 | 455 | 3125 | 62.1 | 1.37 | 18.6 | 1014 | 7 × 7 | 144 | ||
| LE1 | 145 | 2983 | 202 | 1.32 | 5.6 | 1135 | 9 × 9 | 22 | ||
| LE2 | 340 | 5076 | 174 | 1.30 | 13.7 | 2431 | 23 × 23 | 57 | ||
| ( | ||||||||||
| LD0 | 999 | 945 | 2.6 | 1.43 | 47.8 | 440 | 6 × 4 | - | ||
| LD1 | 1001 | 3100 | 7.6 | 1.38 | 40.3 | 1100 | 7 × 4 | - | ||
| LD2 | 1002 | 4800 | 11.4 | 1.37 | 38.1 | 1500 | 7 × 4 | - | ||
| LD3 | 1001 | 6500 | 15.4 | 1.36 | 36.8 | 2000 | 7 × 4 | - |
| Case | Wall-Normal Height | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SE1 | 444 | 600 | 17 | 24 | 29 | 35 | 47 | 59 | 76 * | 94 * | 118 * | 147 * | 182 * | 223 * |
| SE2 | 751 | 500 | 35 | 46 | 58 | 70 | 93 | 116 * | 150 * | 185 * | 231 * | |||
| SE3 | 1014 | 700 | 49 | 65 | 81 | 98 | 131 | 163 * | 212 * | |||||
| LE1 | 1135 | 1500 | 28 | 57 | 113 | 226 * | ||||||||
| LE2 | 2431 | 1500 | 70 | 140 | 280 | |||||||||
| LD0∼LD3 | 440∼2000 | 1500 | 5∼223 | |||||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Pan, C.; Wang, J. Wall-Normal Variation of Spanwise Streak Spacing in Turbulent Boundary Layer With Low-to-Moderate Reynolds Number. Entropy 2019, 21, 24. https://doi.org/10.3390/e21010024
Wang W, Pan C, Wang J. Wall-Normal Variation of Spanwise Streak Spacing in Turbulent Boundary Layer With Low-to-Moderate Reynolds Number. Entropy. 2019; 21(1):24. https://doi.org/10.3390/e21010024
Chicago/Turabian StyleWang, Wenkang, Chong Pan, and Jinjun Wang. 2019. "Wall-Normal Variation of Spanwise Streak Spacing in Turbulent Boundary Layer With Low-to-Moderate Reynolds Number" Entropy 21, no. 1: 24. https://doi.org/10.3390/e21010024
APA StyleWang, W., Pan, C., & Wang, J. (2019). Wall-Normal Variation of Spanwise Streak Spacing in Turbulent Boundary Layer With Low-to-Moderate Reynolds Number. Entropy, 21(1), 24. https://doi.org/10.3390/e21010024