Bayesian Update with Information Quality under the Framework of Evidence Theory


Abstract
:1. Introduction
2. Preliminaries
2.1. Evidence Theory
2.2. Pignistic Probability Transformation
- Let B = then
- Let A = then
2.3. Information Quality
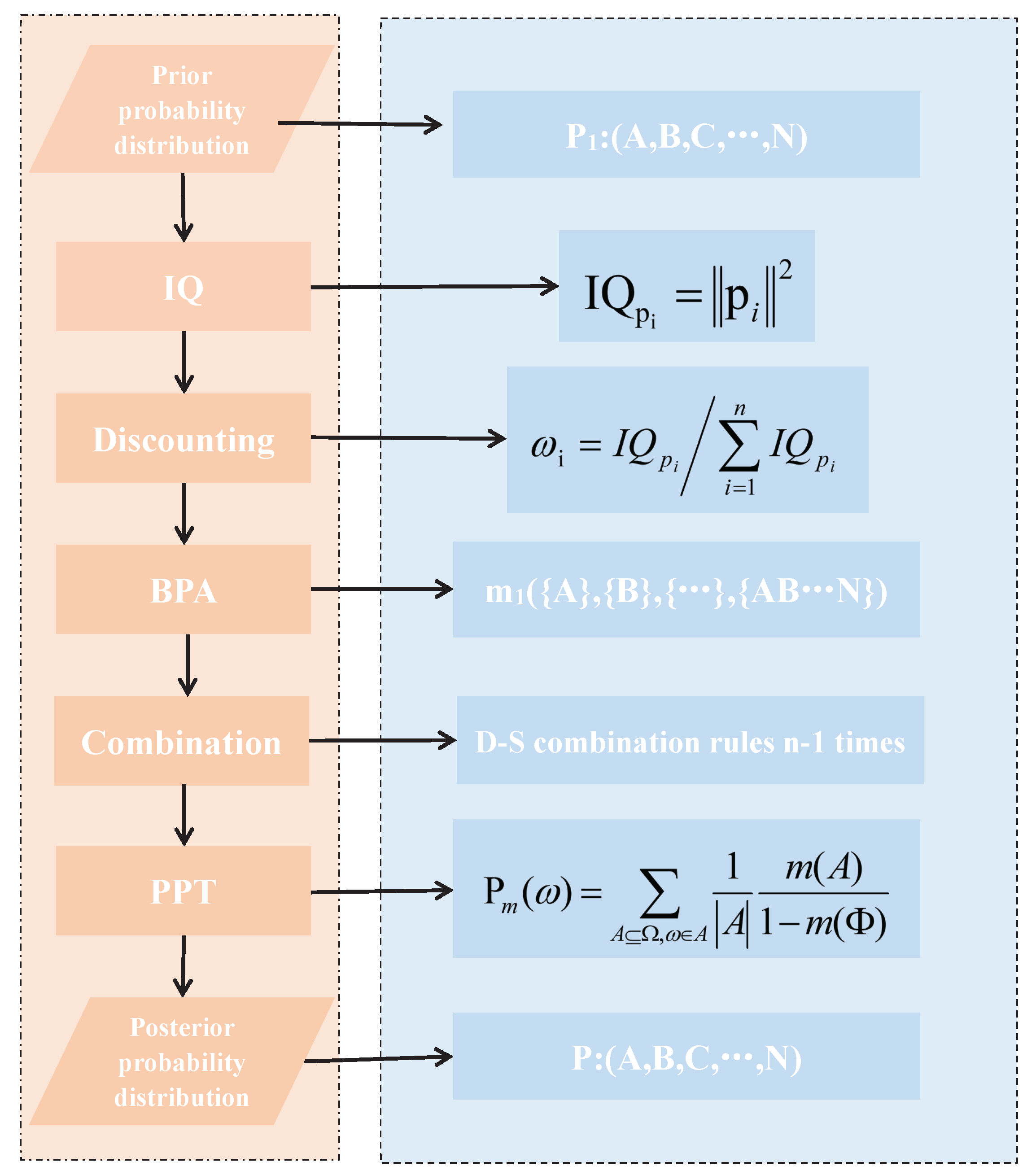
3. Proposed Method
3.1. Determine Weight
3.2. Generate Basic Probability Assignent
| Algorithm 1: The algorithm to generate a basic probability assignment |
| // To get all BPA, execute this algorithm n (total number of probability distributions) times as the algorithm is used to convert a probability distribution to a BPA. Input: The weight of the probability distribution, ⋯ Output: |
3.3. Fusion Method
| Algorithm 2: The algorithm of fusion process |
 |
4. Application
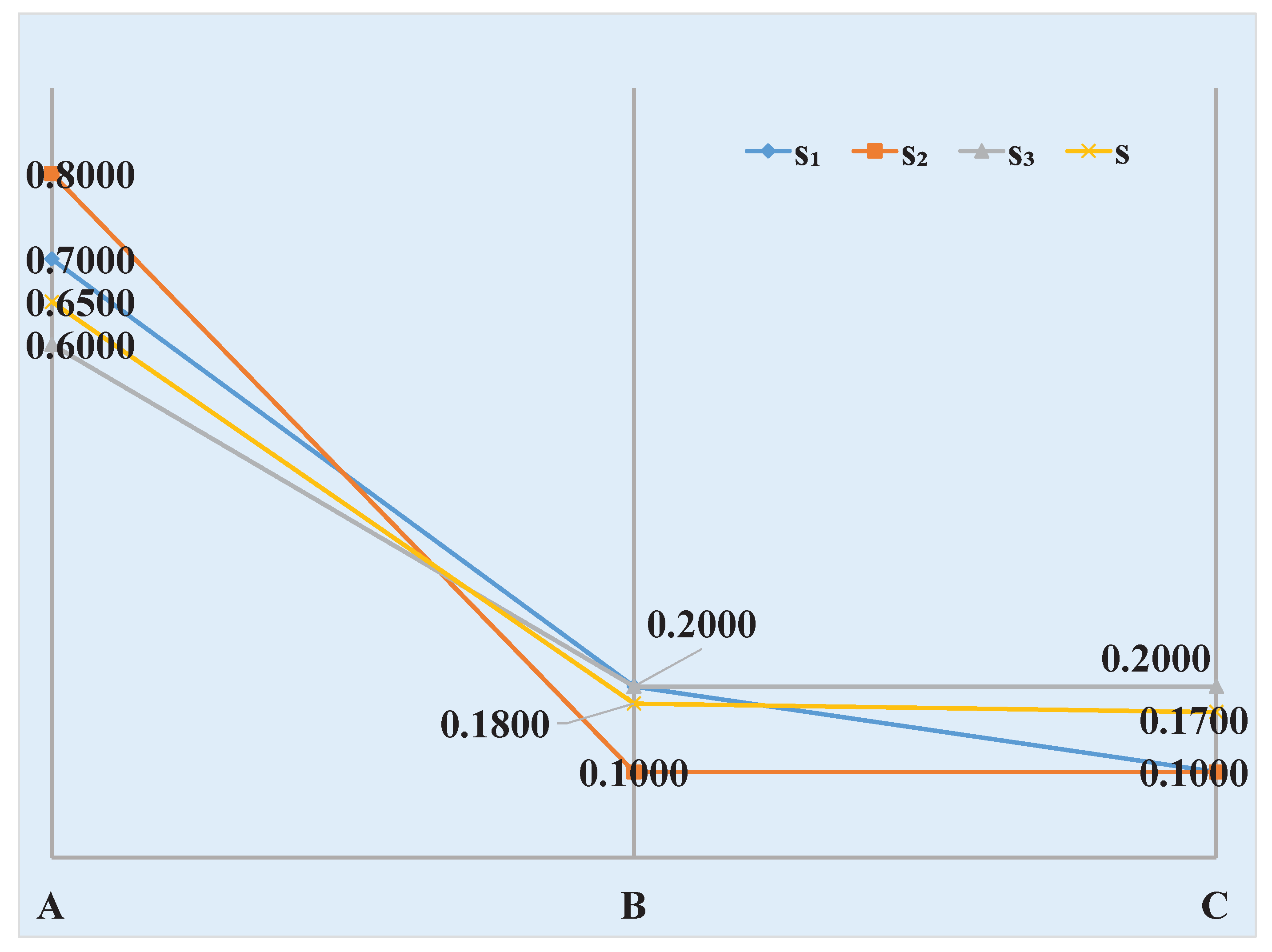
4.1. Numerical Example
- and fusion provides = ({0.3000}, {0.1300}, {0.0900}, {0.4800})
- and fusion provides m = ({0.4000}, {0.1700}, {0.0900}, {0.3400})
4.2. Target Recognition
- and fusion gives ,
- and fusion gives m,
4.3. Multi-Sensor Target Recognition
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Knuth, K.H. Measuring on lattices. AIP Conf. Proc. 2009, 1193, 132–144. [Google Scholar]
- Knuth, K.H.; Erner, P.M.; Frasso, S. Designing Intelligent Instruments. AIP Conf. Proc. 2007, 954, 203–211. [Google Scholar] [Green Version]
- Malakar, N.K.; Gladkov, D.; Knuth, K.H. Modeling a Sensor to Improve Its Efficacy. J. Sens. 2013, 2013, 481054. [Google Scholar] [CrossRef]
- Jain, A.K.; Duin, R.P.; Mao, J. Statistical pattern recognition: A review. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 4–37. [Google Scholar] [CrossRef]
- Guzella, T.S.; Caminhas, W.M. A review of machine learning approaches to spam filtering. Expert Syst. Appl. 2009, 36, 10206–10222. [Google Scholar] [CrossRef]
- Tsilifis, P.; Browning, W.J.; Wood, T.E.; Newton, P.K.; Ghanem, R.G. The Stochastic Quasi-chemical Model for Bacterial Growth: Variational Bayesian Parameter Update. J. Nonlinear Sci. 2018, 28, 371–393. [Google Scholar] [CrossRef]
- Rudin, D. Uncertainty and Persistence: A Bayesian Update Semantics for Probabilistic Expressions. J. Philos. Logic 2018, 47, 365–405. [Google Scholar] [CrossRef]
- Dionelis, N.; Brookes, M. Modulation-domain speech enhancement using a Kalman filter with a Bayesian update of speech and noise in the log-spectral domain. In Proceedings of the Joint Workshop on Hands-free Speech Communications and Microphone Arrays (HSCMA 2017), San Francisco, CA, USA, 1–3 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 111–115. [Google Scholar]
- Knuth, K.H.; Placek, B.; Angerhausen, D.; Carter, J.L.; D’Angelo, B.; Gai, A.D.; Carado, B. EXONEST: The Bayesian Exoplanetary Explorer. Entropy 2017, 19, 559. [Google Scholar] [CrossRef]
- Placek, B. Bayesian Detection and Characterization of Extra-Solar Planets via Photometric Variations; State University of New York at Albany: Albany, NY, USA, 2014. [Google Scholar]
- Placek, B.; Knuth, K.H.; Angerhausen, D. EXONEST: Bayesian model selection applied to the detection and characterization of exoplanets via photometric variations. Astrophys. J. 2014, 795, 112. [Google Scholar] [CrossRef]
- Krylovas, A.; Dadelo, S.; Kosareva, N.; Zavadskas, E.K. Entropy–KEMIRA Approach for MCDM Problem Solution in Human Resources Selection Task. Int. J. Inf. Technol. Decis. Mak. 2017, 16, 1183–1209. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Podvezko, V. Integrated determination of objective criteria weights in MCDM. Int. J. Inf. Technol. Decis. Mak. 2016, 15, 267–283. [Google Scholar] [CrossRef]
- Knuth, K.H.; Habeck, M.; Malakar, N.K.; Mubeen, M.A.; Placek, B. Bayesian evidence and model selection. Dig. Signal Process. 2015, 47, 50–67. [Google Scholar] [CrossRef] [Green Version]
- Rowe, M.C.; Brewer, B.J. AMORPH: A statistical program for characterizing amorphous materials by X-ray diffraction. Comput. Geosci. 2018, 120, 21–31. [Google Scholar] [CrossRef]
- Knuth, K.H. Informed Source Separation: A Bayesian Tutorial. In Proceedings of the 2005 13th European Signal Processing Conference, Antalya, Turkey, 4–8 September 2005; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Zan, J.; Hasenbein, J.J.; Morton, D.P.; Mehrotra, V. Staffing call centers under arrival-rate uncertainty with Bayesian updates. Oper. Res. Lett. 2018, 46, 379–384. [Google Scholar] [CrossRef]
- Gençaga, D.; Knuth, K.H.; Rossow, W.B. A Recipe for the Estimation of Information Flow in a Dynamical System. Entropy 2015, 17, 438–470. [Google Scholar] [CrossRef] [Green Version]
- Dehghannasiri, R.; Esfahani, M.S.; Qian, X.; Dougherty, E.R. Optimal Bayesian Kalman Filtering with Prior Update. IEEE Trans. Signal Process. 2018, 66, 1982–1996. [Google Scholar] [CrossRef]
- Vinogradova, I.; Podvezko, V.; Zavadskas, E. The recalculation of the weights of criteria in MCDM methods using the bayes approach. Symmetry 2018, 10, 205. [Google Scholar] [CrossRef]
- Yager, R.R.; Petry, F. An intelligent quality-based approach to fusing multi-source probabilistic information. Inf. Fusion 2016, 31, 127–136. [Google Scholar] [CrossRef] [Green Version]
- Deng, X.; Jiang, W. Dependence assessment in human reliability analysis using an evidential network approach extended by belief rules and uncertainty measures. Ann. Nucl. Energy 2018, 117, 183–193. [Google Scholar] [CrossRef]
- Han, Y.; Deng, Y. A novel matrix game with payoffs of Maxitive Belief Structure. Int. J. Intell. Syst. 2018. [Google Scholar] [CrossRef]
- Fei, L.; Deng, Y. A new divergence measure for basic probability assignment and its applications in extremely uncertain environments. Int. J. Intell. Syst. 2018. [Google Scholar] [CrossRef]
- Jiang, W. A correlation coefficient for belief functions. Int. J. Approx. Reason. 2018. [Google Scholar] [CrossRef]
- Yin, L.; Deng, X.; Deng, Y. The negation of a basic probability assignment. IEEE Trans. Fuzzy Syst. 2018. [Google Scholar] [CrossRef]
- Wang, X.; Song, Y. Uncertainty measure in evidence theory with its applications. Appl. Intell. 2017, 48, 1–17. [Google Scholar] [CrossRef]
- Sui, L.; Feissel, P.; Denoeux, T. Identification of elastic properties in the belief function framework. Int. J. Approx. Reason. 2018, 101, 69–87. [Google Scholar] [CrossRef]
- Muhammad, K.; Sajjad, M.; Lee, M.Y.; Baik, S.W. Efficient visual attention driven framework for key frames extraction from hysteroscopy videos. Biomed. Signal Process. Control 2017, 33, 161–168. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Sajjad, M.; Baik, S.W. Visual saliency models for summarization of diagnostic hysteroscopy videos in healthcare systems. SpringerPlus 2016, 5, 1495. [Google Scholar] [CrossRef]
- Jiang, W.; Hu, W. An improved soft likelihood function for Dempster-Shafer belief structures. Int. J. Intell. Syst. 2018, 33, 1264–1282. [Google Scholar] [CrossRef]
- Xiao, F.; Qin, B. A Weighted Combination Method for Conflicting Evidence in Multi-Sensor Data Fusion. Sensors 2018, 18, 1487. [Google Scholar] [CrossRef]
- Ahmad, J.; Muhammad, K.; Kwon, S.I.; Baik, S.W.; Rho, S. Dempster-Shafer fusion based gender recognition for speech analysis applications. In Proceedings of the 2016 International Conference on Platform Technology and Service (PlatCon), Jeju, Korea, 15–17 February 2016; IEEE: Piscataway, NJ, USA; pp. 1–4. [Google Scholar]
- Leonard, T.; Hsu, J.S. Bayesian Methods: An Analysis for Statisticians and Interdisciplinary Researchers; Cambridge University Press: Cambridge, UK, 2001; Volume 5. [Google Scholar]
- Yager, R.R. Generalized probabilities of fuzzy events from fuzzy belief structures. Inf. Sci. 1982, 28, 45–62. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; Volume 42. [Google Scholar]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. In Classic Works of the Dempster-Shafer Theory of Belief Functions; Springer: Berlin, Germany, 2008; pp. 57–72. [Google Scholar]
- Liu, W. Analyzing the degree of conflict among belief functions. Artif. Intell. 2006, 170, 909–924. [Google Scholar] [CrossRef] [Green Version]
- Kang, B.; Chhipi-Shrestha, G.; Deng, Y.; Hewage, K.; Sadiq, R. Stable strategies analysis based on the utility of Z-number in the evolutionary games. Appl. Math. Comput. 2018, 324, 202–217. [Google Scholar] [CrossRef]
- Kang, B.; Deng, Y.; Hewage, K.; Sadiq, R. A method of measuring uncertainty for Z-number. IEEE Trans. Fuzzy Syst. 2018. [Google Scholar] [CrossRef]
- Xiao, F. A Hybrid Fuzzy Soft Sets Decision Making Method in Medical Diagnosis. IEEE Access 2018, 6, 25300–25312. [Google Scholar] [CrossRef]
- Mardani, A.; Jusoh, A.; Zavadskas, E.K. Fuzzy multiple criteria decision-making techniques and applications—Two decades review from 1994 to 2014. Expert Syst. Appl. 2015, 42, 4126–4148. [Google Scholar] [CrossRef]
- Han, Y.; Deng, Y. An enhanced fuzzy evidential DEMATEL method with its application to identify critical success factors. Soft Comput. 2018, 22, 5073–5090. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Antuchevicience, J.; Hajiagha, S.H.R. The interval-valued intuitionistic fuzzy MULTIMOORA method for group decision making in engineering. Math. Probl. Eng. 2015, 2015, 560690. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Antucheviciene, J.; Turskis, Z.; Adeli, H. Hybrid multiple-criteria decision-making methods: A review of applications in engineering. Scientia Iranica 2016, 23, 1–20. [Google Scholar] [CrossRef]
- Tsai, S.B. Using grey models for forecasting China’s growth trends in renewable energy consumption. Clean Technol. Environ. Policy 2016, 18, 563–571. [Google Scholar] [CrossRef]
- Tsai, S.B.; Lee, Y.C.; Guo, J.J. Using modified grey forecasting models to forecast the growth trends of green materials. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2014, 228, 931–940. [Google Scholar] [CrossRef]
- Li, Z.; Chen, L. A novel evidential FMEA method by integrating fuzzy belief structure and grey relational projection method. Eng. Appl. Artif. Intell. 2019, 77, 136–147. [Google Scholar] [CrossRef]
- Xiao, F. A novel multi-criteria decision making method for assessing health-care waste treatment technologies based on D numbers. Eng. Appl. Artif. Intell. 2018, 71, 216–225. [Google Scholar] [CrossRef]
- Mo, H.; Deng, Y. A new MADA methodology based on D numbers. Int. J. Fuzzy Syst. 2018, 20, 2458–2469. [Google Scholar] [CrossRef]
- Xiao, F. An Intelligent Complex Event Processing with D Numbers under Fuzzy Environment. Math. Probl. Eng. 2016, 2016, 3713518. [Google Scholar] [CrossRef]
- Daijun, W. A modified D numbers methodology for environmental impact assessment. Technol. Econ. Dev. Econ. 2018, 24, 653–669. [Google Scholar]
- Deng, X.; Deng, Y. D-AHP method with different credibility of information. Soft Comput. 2018. [Google Scholar] [CrossRef]
- Chen, L.; Deng, Y. A new failure mode and effects analysis model using Dempster-Shafer evidence theory and grey relational projection method. Eng. Appl. Artif. Intell. 2018, 76, 13–20. [Google Scholar] [CrossRef]
- Chen, L.; Deng, X. A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory. Appl. Sci. 2018, 8, 563. [Google Scholar] [CrossRef]
- Xiao, F. A Novel Evidence Theory and Fuzzy Preference Approach-Based Multi-Sensor Data Fusion Technique for Fault Diagnosis. Sensors 2017, 17, 2504. [Google Scholar] [CrossRef]
- Zhang, H.; Deng, Y. Engine fault diagnosis based on sensor data fusion considering information quality and evidence theory. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Fei, L.; Deng, Y.; Hu, Y. DS-VIKOR: A New Multi-criteria Decision-Making Method for Supplier Selection. Int. J. Fuzzy Syst. 2018. [Google Scholar] [CrossRef]
- He, Z.; Jiang, W. An evidential dynamical model to predict the interference effect of categorization on decision making. Knowl.-Based Syst. 2018, 150, 139–149. [Google Scholar] [CrossRef]
- Zhang, W.; Deng, Y. Combining conflicting evidence using the DEMATEL method. Soft Comput. 2018. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, Y. Base belief function: An efficient method of conflict management. J. Ambient Intell. Hum. Comput. 2018. [Google Scholar] [CrossRef]
- Yager, R.R. On the Dempster-Shafer framework and new combination rules. Inf. Sci. 1987, 41, 93–137. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. Representation and combination of uncertainty with belief functions and possibility measures. Comput. Intell. 1988, 4, 244–264. [Google Scholar] [CrossRef]
- Smets, P. The combination of evidence in the transferable belief model. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 447–458. [Google Scholar] [CrossRef] [Green Version]
- Murphy, C.K. Combining belief functions when evidence conflicts. Decis. Support Syst. 2000, 29, 1–9. [Google Scholar] [CrossRef]
- DENG, Y.; SHI, W.; LIU, Q. Combining Be-lief Function based on Distance Function. Decis. Support Syst. 2004, 38, 489–493. [Google Scholar]
- Deng, X.; Jiang, W.; Wang, Z. Zero-sum polymatrix games with link uncertainty: A Dempster-Shafer theory solution. Appl. Math. Comput. 2019, 340, 101–112. [Google Scholar] [CrossRef]
- Li, Y.; Deng, Y. Generalized Ordered Propositions Fusion Based on Belief Entropy. Int. J. Comput. Commun. Control 2018, 13, 792–807. [Google Scholar] [CrossRef]
- Deng, X. Analyzing the monotonicity of belief interval based uncertainty measures in belief function theory. Int. J. Intell. Syst. 2018, 33, 1869–1879. [Google Scholar] [CrossRef]
- Xiao, F. Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf. Fusion 2019, 46, 23–32. [Google Scholar] [CrossRef]
- Pan, L.; Deng, Y. A New Belief Entropy to Measure Uncertainty of Basic Probability Assignments Based on Belief Function and Plausibility Function. Entropy 2018, 20, 842. [Google Scholar] [CrossRef]
- Zhou, X.; Hu, Y.; Deng, Y.; Chan, F.T.S.; Ishizaka, A. A DEMATEL-Based Completion Method for Incomplete Pairwise Comparison Matrix in AHP. Ann. Oper. Res. 2018, 271, 1045–1066. [Google Scholar] [CrossRef]
- Knuth, K.H.; Skilling, J. Foundations of inference. Axioms 2012, 1, 38–73. [Google Scholar] [CrossRef]
- Brewer, B.J. Computing Entropies with Nested Sampling. Entropy 2017, 19, 422. [Google Scholar] [CrossRef]
- Han, Y.; Deng, Y. A hybrid intelligent model for Assessment of critical success factors in high risk emergency system. J. Ambient Intell. Hum. Comput. 2018, 9, 1933–1953. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Techn. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Gini, C. Variabilità e mutabilità. Reprinted in Memorie di Metodologica Statistica; Pizetti, E., Salvemini, T., Eds.; Libreria Eredi Virgilio Veschi: Rome, Italy, 1912. [Google Scholar]
- Xiao, F. An Improved Method for Combining Conflicting Evidences Based on the Similarity Measure and Belief Function Entropy. Int. J. Fuzzy Syst. 2018, 20, 1256–1266. [Google Scholar] [CrossRef]
- Deng, Y. Deng entropy. Chaos Solitons Fractals 2016, 91, 549–553. [Google Scholar] [CrossRef]
- Kang, B.; Deng, Y.; Hewage, K.; Sadiq, R. Generating Z-number based on OWA weights using maximum entropy. Int. J. Intell. Syst. 2018, 33, 1745–1755. [Google Scholar] [CrossRef]
- Song, M.; Jiang, W.; Xie, C.; Zhou, D. A new interval numbers power average operator in multiple attribute decision making. Int. J. Intell. Syst. 2017, 32, 631–644. [Google Scholar] [CrossRef]
- Yager, R.R. On ordered weighted averaging aggregation operators in multicriteria decisionmaking. IEEE Trans. Syst. Man Cybern. 1988, 18, 183–190. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Phan, T.C.; Nguyen, Q.V.H.; Aberer, K.; Stantic, B. Maximal fusion of facts on the web with credibility guarantee. Inf. Fusion 2019, 48, 55–66. [Google Scholar] [CrossRef]
- Buck, B.; Macaulay, V.A. Maximum Entropy in Action: A Collection of Expository Essays; Oxford University Press: New York, NY, USA, 1991. [Google Scholar]
- Yager, R.R. Modeling multi-criteria objective functions using fuzzy measures. Inf. Fusion 2016, 29, 105–111. [Google Scholar] [CrossRef]
- Kullback, S. Information Theory and Statistics; Courier Corp.: North Chelmsford, MA, USA, 1997. [Google Scholar]
- Krylovas, A.; Kosareva, N.; Zavadskas, E.K. WEBIRA-comparative analysis of weight balancing method. Int. J. Comput. Commun. Control 2018, 12, 238–253. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| , | , , | , , , | , , , , | |
|---|---|---|---|---|
| simple average | 0.6000 | 0.5800 | 0.5750 | 0.5800 |
| 0.1500 | 0.1400 | 0.1250 | 0.1200 | |
| 0.2500 | 0.2800 | 0.3000 | 0.3000 | |
| proposed method | 0.5532 | 0.5924 | 0.6267 | 0.6428 |
| 0.1899 | 0.1490 | 0.1185 | 0.1100 | |
| 0.2569 | 0.2586 | 0.2548 | 0.2472 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Xiao, F. Bayesian Update with Information Quality under the Framework of Evidence Theory. Entropy 2019, 21, 5. https://doi.org/10.3390/e21010005
Li Y, Xiao F. Bayesian Update with Information Quality under the Framework of Evidence Theory. Entropy. 2019; 21(1):5. https://doi.org/10.3390/e21010005
Chicago/Turabian StyleLi, Yuting, and Fuyuan Xiao. 2019. "Bayesian Update with Information Quality under the Framework of Evidence Theory" Entropy 21, no. 1: 5. https://doi.org/10.3390/e21010005
APA StyleLi, Y., & Xiao, F. (2019). Bayesian Update with Information Quality under the Framework of Evidence Theory. Entropy, 21(1), 5. https://doi.org/10.3390/e21010005