1. Introduction
The scientific study of consciousness walks a fine line between physics and metaphysics. On the one hand, there are observable consequences to what we intuitively describe as consciousness. Sleep, for example, is an outward behavior that is uncontroversially associated with a lower overall level of consciousness. Similarly, scientists can decipher what is intrinsically experienced when humans are conscious via verbal reports or other outward signs of awareness. By studying the physiology of the brain during these specific behaviors, scientists can study “neuronal correlates of consciousness” (NCCs), which point to where in the brain conscious experience is generated and what physiological processes correlate with it [
1]. On the other hand, NCCs cannot be used to explain
why we are conscious or to predict whether or not another system demonstrating similar properties to NCCs is conscious. Indeed, NCCs can only tell us the physiological processes that correlate with what are assumed to be the functional consequences of consciousness and, in principle, may not actually correspond to a measurement of what it is like to have subjective experience [
2]. In other words, we can objectively measure behaviors we assume accurately reflect consciousness but, currently, there exist no scientific tools permitting testing our assumptions. As a result, we struggle to differentiate whether a system is truly conscious or is instead simply going through the motions and giving outward signs of, or even actively reporting, an internal experience that does not exist (e.g., [
3]).
This is the “hard problem” of consciousness [
2] and it is what differentiates the study of consciousness from all other scientific endeavors. Since consciousness is subjective (by definition), there is no objective way to prove whether or not a system experiences it readily accessible to science. Addressing the hard problem, therefore, necessitates an inversion of the approach underlying NCCs: rather than starting with observables and deducing consciousness, one must start with consciousness and deduce observables. This has motivated theorists to develop phenomenological approaches that adopt rigorous assumptions of what properties consciousness must include based on human experience, and, from these, “derive” the physical processes that give rise to these properties. The benefit to this approach is not that the hard-problem is avoided, but rather, that the solution appears self-evident given the phenomenological axioms of the theory. In practice, translating from phenomenology to physics is rarely obvious, but the approach remains promising.
The phenomenological approach to addressing the hard problem of consciousness is exemplified in Integrated Information Theory (IIT) [
4,
5], a leading theory of consciousness. Indeed, IIT is a leading contender in modern neuroscience precisely because it takes a phenomenological approach and offers a well-motivated solution to the hard problem of consciousness [
6]. Three phenomenological axioms form the backbone of IIT: information, integration, and exclusion. The first,
information, states that by taking on only one of the many possibilities a conscious experience generates information (in the Shannon sense, e.g., via a reduction in uncertainty [
7]). The second,
integration, states each conscious experience is a single “unified whole”. The third,
exclusion, states conscious experience is exclusive in that each component in a system can take part in at most one conscious experience at a time (simultaneous overlapping experiences are forbidden). Given these three phenomenological axioms, IIT derives a mathematical measure of integrated information—
—that is designed to quantify the extent to which a system is conscious based on the logical architecture (i.e., the “wiring”) underlying its internal dynamics.
In constructing
as a phenomenologically-derived measure of consciousness, IIT must assume a connection between its phenomenological axioms and the physical processes that embody those axioms. It is important to emphasize that this assumption is nothing less than a proposed solution to the hard problem of consciousness, as it connects subjective experience (axiomatized as integration, information, and exclusion) and objective (measurable) properties of a physical system. As such, it is possible for one to accept the phenomenological axioms of the theory without accepting
as the correct quantification of these axioms and, indeed, IIT has undergone several revisions in an attempt to better reflect the phenomenological axioms in the proposed construction of
[
5,
8,
9]. Experimental falsification of IIT or any other similarly constructed theory is a matter of sufficiently violating our intuitive understanding of what a measure of consciousness should predict in a given situation which, outside of a few clear cases (e.g., that humans are conscious while awake), varies across individuals and adds a level of subjectivity to assessing the validity of measures derived based on phenomenology. Given that IIT is a phenomenological theory, it is therefore only natural that the bulk of epistemic justification for the theory comes in the form of carefully constructed logical arguments, rather than directly from empirical observation [
10]. For this reason, it is extremely important to isolate and understand the logical assumptions that underlie any potentially controversial deductions that come from the theory, as this plays an important role in assessing the foundations of the theory.
Here, we focus on a particularly controversial aspect of IIT, namely, the fact that philosophical zombies are permitted by the theory. By definition, a philosophical zombie is an unconscious system capable of perfectly emulating the outward behavior of a conscious system. In addition to being epistemologically problematic [
11,
12], such systems are thought to indicate problems with the logical foundations of any theory that admits them [
13], as it is difficult to imagine how a difference in subjective experience can be scientifically justified without any apparent difference in the outward functionality of the system [
14]. In IIT, philosophical zombies arise as a direct consequence of IIT’s proposed translation of the integration axiom. IIT assumes the subjective experience of a unified whole (the integration axiom) requires feedback in the physical substrate that gives rise to consciousness as a necessary (but not sufficient) condition. This implies any strictly feed-forward logical architecture has
and is unconscious by default, despite the fact that the logical architecture of an “integrated” system with
can always be unfolded [
15] or decomposed [
16,
17] into a system with
without affecting the outward behavior of the system.
In what follows, we demonstrate the existence of a fundamentally new type of feed-forward philosophical zombie, namely one that is isomorphic to its conscious counterpart in its state-transition diagram. To do so, we implement techniques based on Krohn–Rhodes decomposition from automata theory to isomorphically decompose a system with onto a feed-forward system with . The result is a feed-forward philosophical zombie capable of perfectly emulating the behavior of its conscious counterpart without increasing the size of the original system. Given the strong mathematical equivalence between isomorphic systems, our framework suggests the presence or absence of feedback is not associated with observable differences in function or other properties such as efficiency or autonomy. Our formalism translates into a proposed mathematical criterion that any observationally verifiable measure of consciousness should be invariant under physical isomorphisms. That is, we suggest conscious systems should form an equivalence class of physical implementations with structurally equivalent state-transition diagrams. Enforcement of this criterion serves as a necessary, but not sufficient, condition for any theory of consciousness to be free from philosophical zombies and the epistemological problems they pose.
2. Methods
Our methodology is based on automata theory [
18,
19], where the concept of philosophical zombies has a natural interpretation in terms of “emulation” [
20]. The goal of our methodology is to demonstrate that it is possible to isomorphically emulate an integrated finite-state automaton (
) with a feed-forward finite-state automaton (
) using techniques closely related to the Krohn–Rhodes theorem [
16,
21].
2.1. Finite-State Automata
Finite-state automata are abstract computing devices, or “machines”, designed to model a discrete system as it transitions between states. Automata theory was invented to address biological and psychological problems [
22,
23] and it remains an extremely intuitive choice for modeling neuronal systems. This is because one can define an automaton in terms of how specific abstract inputs lead to changes within a system. Namely, if we have a set of potential inputs
and a set of internal states
Q, we define an automaton
A in terms of the tuple
where
is a map from the current state and input symbol to the next state, and
is the starting state of the system. To simplify notation, we write
to denote the transition from
q to
upon receiving the input symbol
.
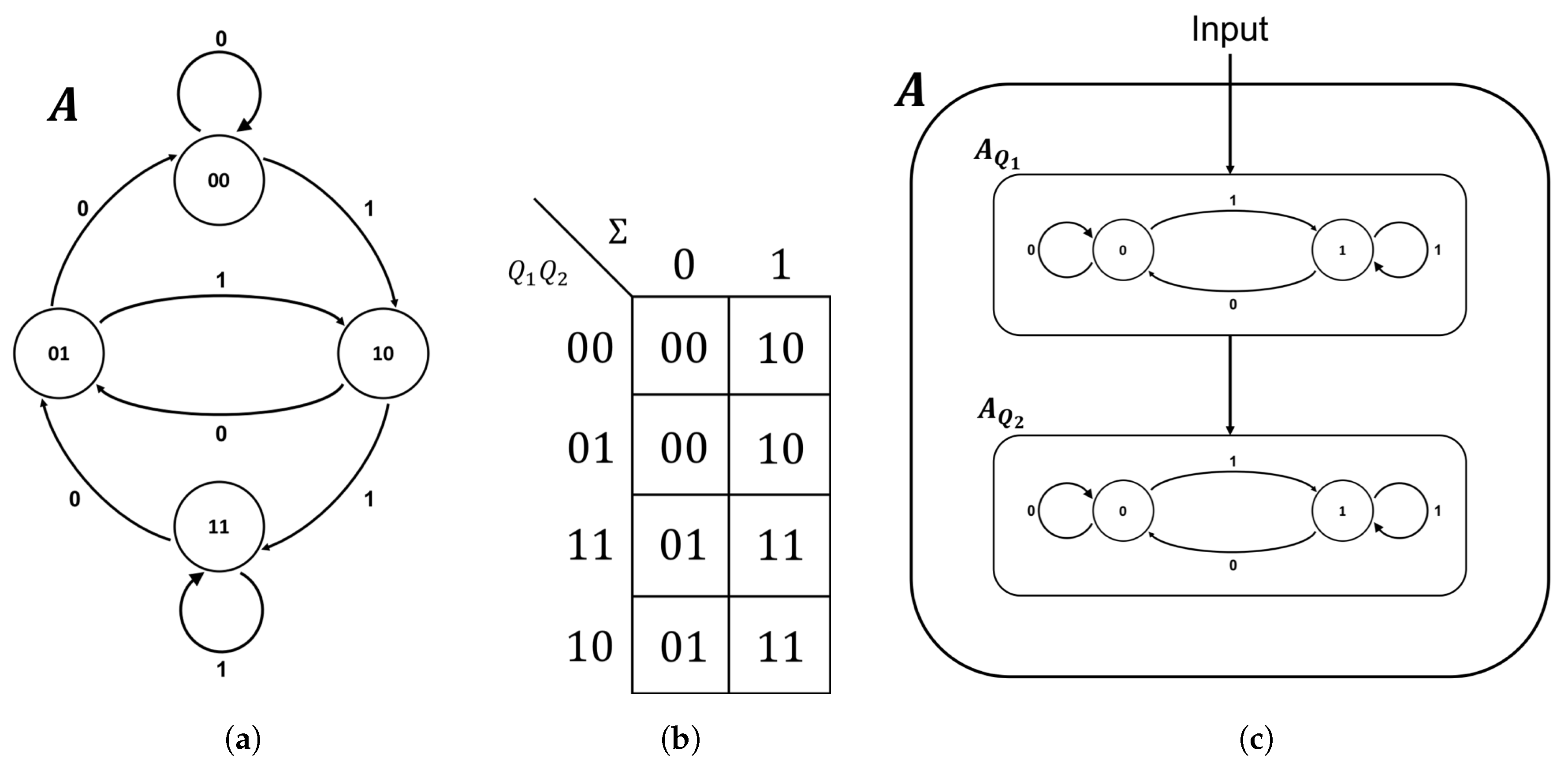
For example, consider the “right-shift automaton”
A shown in
Figure 1. This automaton is designed to model a system with a two-bit internal register that processes new elements from the input alphabet
by shifting the bits in the register to the right and appending the new element on the left [
24]. The global state of the machine is the combined state of the left and right register, thus
and the transition function
specifies how this global state changes in response to each input, as shown in
Figure 1b.
In addition to the global state transitions, each individual bit in the register of the right-shift automaton is itself an automaton. In other words, the global functionality of the system is nothing more than the combined output from a system of interconnected automata, each specifying the state of a single component or “coordinate” of the system. Specifically, the right-shift automaton is comprised of an automaton
responsible for the left bit of register and an automaton
responsible for the right bit of the register. By definition,
copies the input from the environment and
copies the state of
. Thus,
and
and the transition functions for the coordinates are
. This fine-grained view of the right-shift automaton specifies its
logical architecture and is shown in
Figure 1c. The logical architecture of the system is the “circuitry” that underlies its behavior and, as such, is often specified explicitly in terms of logic gates, with the implicit understanding that each logic gate is a component automaton.
It is important to note that not all automata require multiple input symbols and it is common to find examples of automata with a single-letter input alphabet. In fact, any deterministic state-transition diagram can be represented in this way, with a single input letter signaling the passage of time. In this case, the states of the automaton are the states of the system, the input alphabet is the passage of time, and the transition function
is given by the transition probability matrix (TPM) for the system. Because
is a mathematical measure that takes a TPM as input, this specialized case provides a concrete link between IIT and automata theory. Non-deterministic TPMs can also be described in terms of finite-state automata [
24,
25] but, for our purposes, this generalization is not necessary.
2.2. Cascade Decomposition
The idea of decomposability is central to both IIT and automata theory. As Tegmark [
26] pointed out, mathematical measures of integrated information, including
, quantify the inability to decompose a transition probability matrix
M into two independent processes
and
. Given a distribution over initial states
p, if we approximate
M by the tensor factorization
, then
, in general, quantifies an information-theoretic distance
D between the regular dynamics
and the dynamics under the partitioned approximation
(i.e.,
). In the latest version of IIT [
5], only
unidirectional partitions are implemented (information can flow in one direction across the partition) which mathematically enforces the assumption that feedback is a necessary condition for consciousness.
Decomposition in automata theory, on the other hand, has historically been an engineering problem. The goal is to decompose an automaton
A into an automaton
which is made of simpler physical components than
A and maps
homomorphically onto
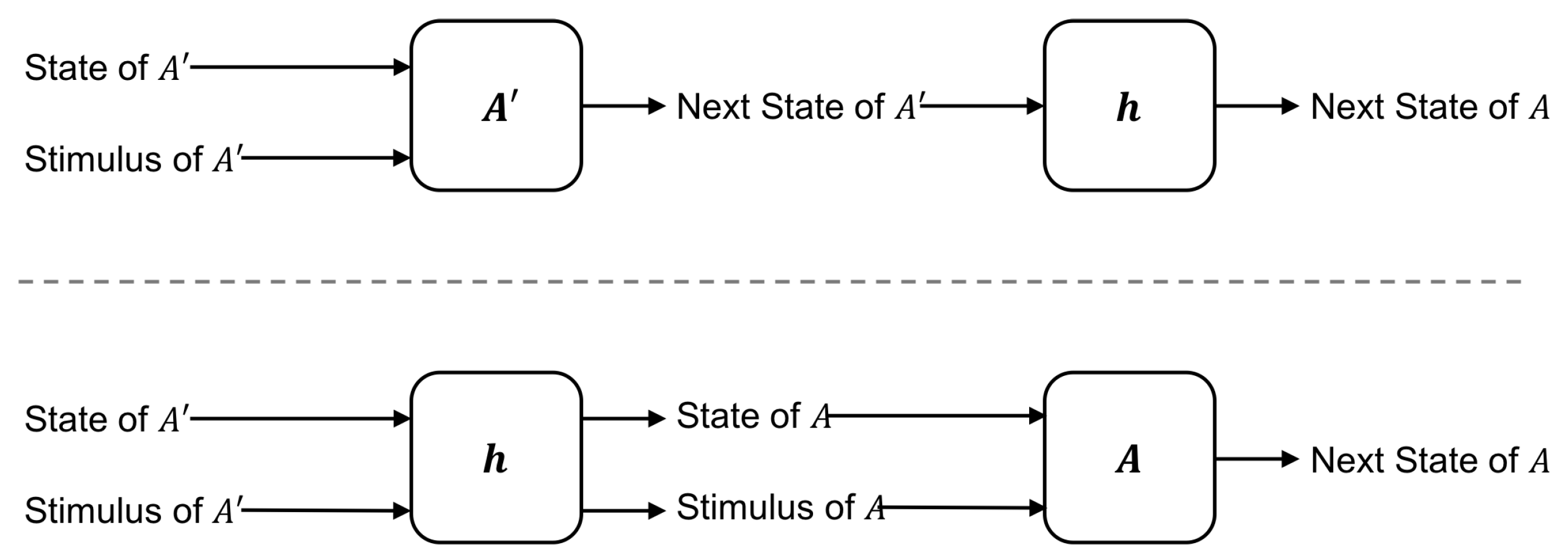
A. Here, we define a homomorphism
h as a map from the states, stimuli, and transitions of
onto the states, stimuli, and transitions of
A such that for every state and stimulus in
the results obtained by the following two methods are equivalent [
22]:
Use the stimulus of to update the state of then map the resulting state onto A.
Map the stimulus of and the state of to the corresponding stimulus/state in A then update the state of A using the stimulus of A.
In other words, the map
h is a homomorphism if it
commutes with the dynamics of the system. The two operations (listed above) that must commute are shown schematically in
Figure 2. If the homomorphism
h is bijective, then it is also an
isomorphism and the two automata necessarily have the same number of states.
From an engineering perspective, homomorphic/isomorphic logical architectures are useful because they allow flexibility when choosing a logical architecture to implement a given computation (i.e., the homomorphic system can perfectly emulate the original). Mathematically, the difference between homomorphic automata is the internal labeling scheme used to encode the states/stimuli of the global finite-state machine, which specifies the behavior of the system. Thus, the homomorphism h is a dictionary that translates between different representations of the same computation. Just as the same sentence can be spoken in different languages, the same computation can be instantiated using different encodings. Under this view, what gives a computational state meaning is not its binary representation (label) but rather its causal relationship with other global states/stimuli, which is what the homomorphism preserves.
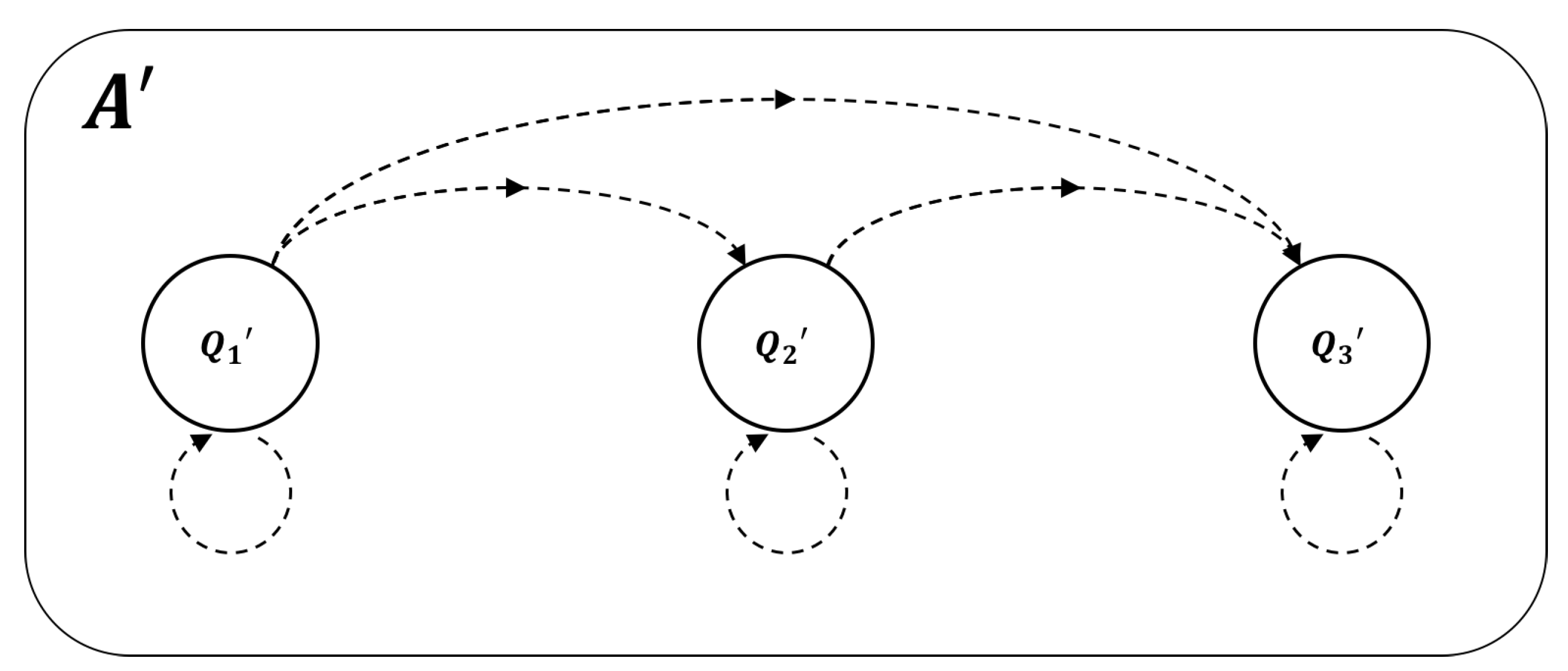
Because we are interested in isolating the role of feedback, the specific type of decomposition we seek is a feed-forward or
cascade decomposition of the logical architecture of a given system. Cascade decomposition takes the automaton
A and decomposes it into a homomorphic automaton
comprised of several elementary automata “cascaded together”. By this, what is meant is that the output from one component serves as the input to another such that the flow of information in the system is strictly unidirectional (
Figure 3). The resulting logical architecture is said to be in “cascade” or “hierarchical” form and is functionally identical to the original system (i.e., it realizes the same global finite-state machine).
At this point, the connection between IIT and cascade decomposition is readily apparent: if an automaton with feedback allows a homomorphic cascade decomposition, then the behavior of the resulting system can emulate the original but utilizes only feed-forward connections. Therefore, there exists a unidirectional partition of the system that leaves the dynamics of the new system (i.e., the transition probability matrix) unchanged such that for all states.
In the language of Oizumi et al. [
5], we can prove this by letting
be the constellation that is generated as a result of any unidirectional partition and
C be the original constellation. Because
has no effect on the TPM, we are guaranteed that
and
. We can repeat this process for every possible subsystem within a given system and, since the flow of information is always unidirectional,
for all subsets so
. Thus,
for all states and subsystems of a cascade automaton.
Pertinently, the Krohn–Rhodes theorem proves that every automaton can be decomposed into cascade form [
16,
17], which implies
every system for which we can measure non-zero Φ allows a feed-forward decomposition with . These feed-forward systems are “philosophical zombies” in the sense that they lack subjective experience according to IIT (i.e.,
), but they nonetheless perfectly emulate the behavior of conscious systems. However, the Krohn–Rhodes theorem does not tell us
how to construct such systems. Furthermore, the map between systems is only guaranteed to be homomorphic (many-to-one) which allows for the possibility that
is picking up on other properties (e.g., the efficiency and/or autonomy of the computation) in addition to the presence or absence of feedback [
5].
To isolate what
is measuring, we must go one step further and insist that the decomposition is isomorphic (one-to-one) such that the original and zombie systems can be considered to perform the same computation [
20] (same global state-transition topology) under the same resource constraints. In this case, the feed-forward system has the
exact same number of states as its counterpart with feedback. Provided the latter has
, this implies
is not a measure of the efficiency of a given computation, as both systems require the same amount of memory. This is not to say that feedback and
do not
correlate with efficiency because, in general, they do [
27]. For certain computations, however, the presence of feedback is not associated with increased efficiency but only increased interdependence among elements.
It is these specific corner cases that are most beneficial if one wants to assess the validity of the theory, as they allow one to understand whether or not feedback is important in absence of the benefits typically associated with its presence. In other words, IIT’s translation of the integration axiom is that
feedback is a minimal criterion for the subjective experience of a unified whole; however,
is described as quantifying “the amount of information generated by a complex of elements, above and beyond the information generated by its parts” [
4], which seems to imply feedback enables something “extra” feed-forward systems cannot reproduce. An isomorphic feed-forward decomposition allows us to carefully track the mathematical changes that destroy this additional information, in a way that lets us preserve the efficiency and functionality of the original system. This, in turn, provides the clearest possible case to assess whether or not this additional information is likely to correspond to a phenomenological difference between systems.
2.3. Feed-Forward Isomorphisms via Preserved Partitions
The special type of computation that allows an isomorphic feed-forward decomposition is one in which the global state-transition diagram is amenable to decomposition via a nested sequence of preserved partitions. A preserved partition is a way of partitioning the state space of a system into blocks of states (macrostates) that transition together. Namely, a partition
P is preserved if it breaks the state space
S into a set of blocks
such that every state within each block transitions to a state within the same block [
22,
28]. If we denote the state-transition function
, then a block
is preserved when:
In other words, for to be preserved, in x must transition to some state in a single block ( is allowed). Conversely, is not preserved if there exist two or more states in that transition to different blocks (i.e., ∃ such that and with ). In order for the entire partition to be preserved, each block within the partition must be preserved.
For an isomorphic cascade decomposition to exist, we must be able to iteratively construct a hierarchy or “nested sequence” of preserved partitions such that each partition
evenly splits the partition
above it in half, leading to a more and more refined description of the system. For a system with
states where
n is the number of binary components in the original system, this implies that we need to find exactly
n nested preserved partitions, each of which then maps onto a unique component of the cascade automaton, as demonstrated in
Section 2.3.1.
If one cannot find a preserved partition made of disjoint blocks or the blocks of a given partition do not evenly split the blocks of the partition above it in half, then the system in question does not allow an isomorphic feed-forward decomposition. It will, however, still allow a
homomorphic feed-forward decomposition based on a nested sequence of preserved
covers, which forms the basis of standard Krohn–Rhodes decomposition techniques [
20,
22,
29]. Unfortunately, there does not appear to be a way to tell a priori whether or not a given computation will ultimately allow an isomorphic feed-forward decomposition, although a high degree of symmetry in the global state-transition diagram is certainly a requirement.
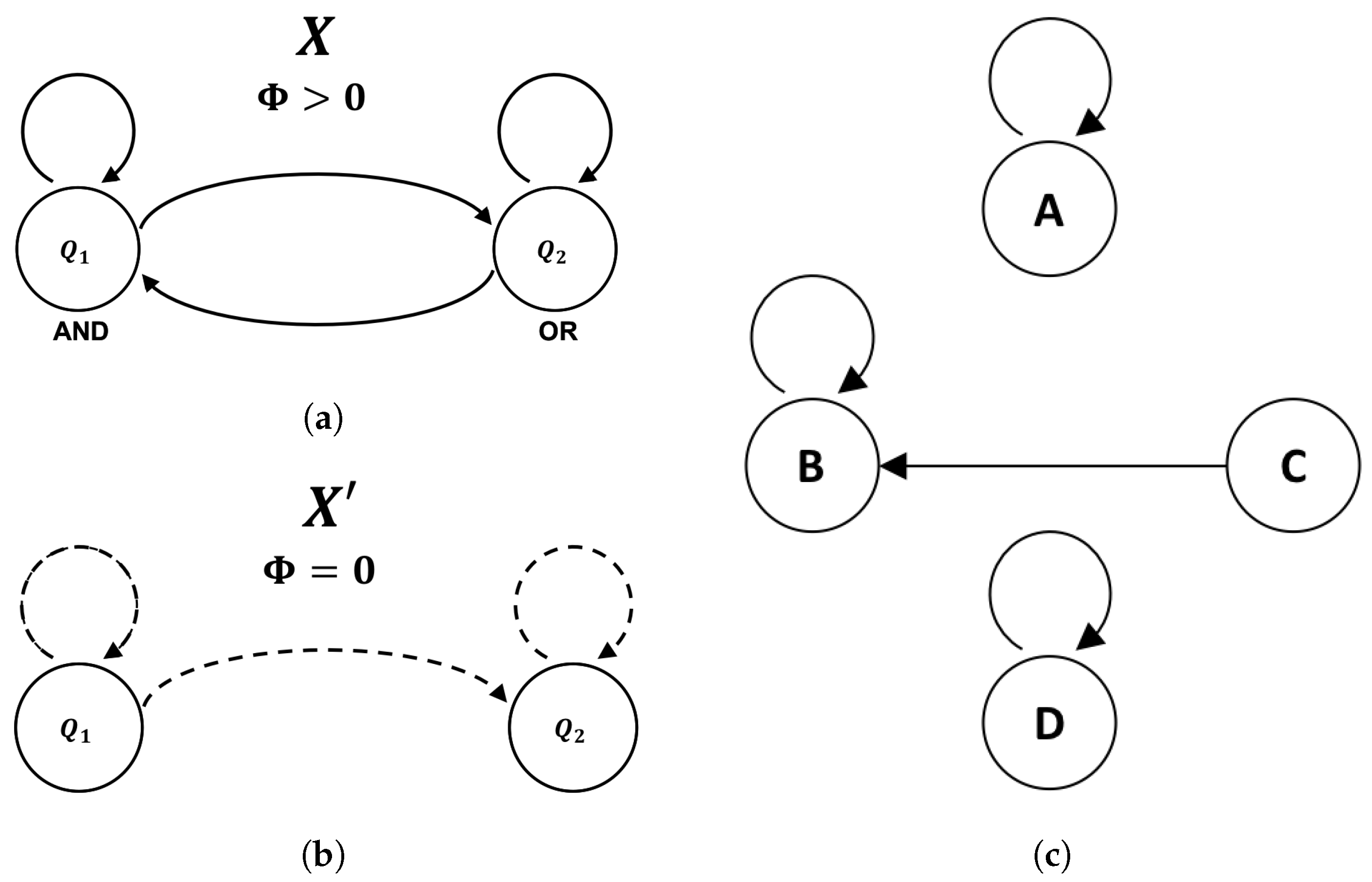
2.3.1. Example: AND/OR ≅ COPY/OR
As an example, we isomorphically decompose the feedback system
X, comprised of an
AND gate and an
OR gate, as shown in
Figure 4a. As it stands,
X is not in cascade form because information flows bidirectionally between the components
and
. While this feedback alone is insufficient to guarantee
, one can readily check that
X does indeed have
for all possible states (e.g., [
30]). The global state-transition diagram for the system
X is shown in
Figure 4c. Note that we have purposefully left off the binary labels that
X uses to instantiate these computational states, as the goal is to relabel them in a way that results in a different (feed-forward) instantiation of the same underlying computation. In general, one typically starts from the computation and derives a single logical architecture but, here, we must start and end with fixed (isomorphic) logical architectures—passing through the underlying computation in between. The general form of the feed-forward logical architecture
that we seek is shown in
Figure 4b.
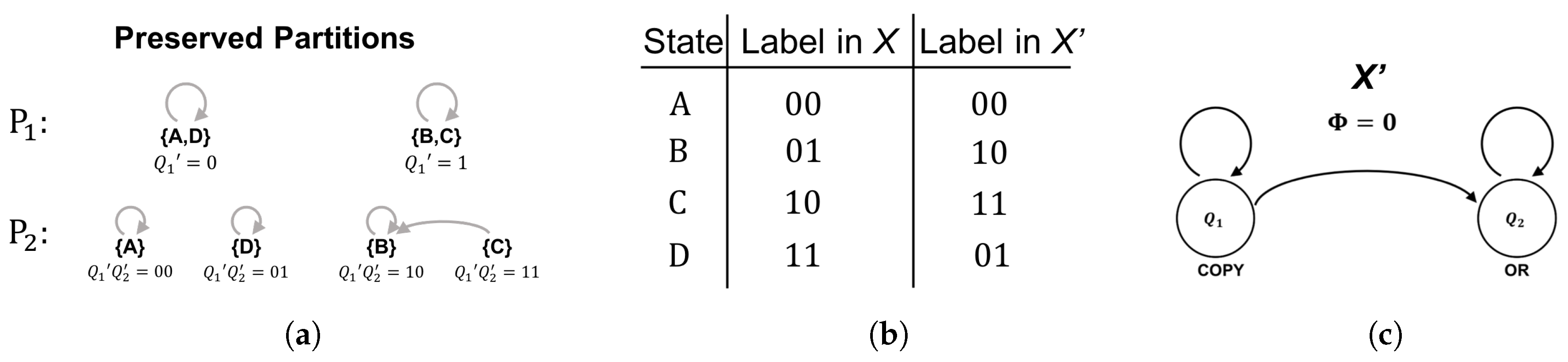
Given the global state-transition diagram shown in
Figure 4c, we let our first preserved partition be
with
and
. It is easy to check that this partition is preserved, as one can verify that every element in
transitions to an element in
and every element in
transitions to an element in
(shown topologically in
Figure 5a). We then assign all the states in
a first coordinate value of 0 and all the states in
a first coordinate value of 1, which guarantees the state of the first coordinate is independent of later coordinates. If the value of the first coordinate is 0, it will remain 0 and, if the value of the first coordinate is 1, it will remain 1, because states within a given block transition together. Because 0 goes to 0 and 1 goes to 1, the logic element (component automaton) representing the first coordinate
is a
COPY gate receiving its previous state as input.
The second preserved partition must evenly split each block within in half. Letting we have , , , and . At this stage, it is trivial to verify that the partition is preserved because each block is comprised of only one state which is guaranteed to transition to a single block. As with , the logic gate for the second coordinate () is specified by the way the labeled blocks of transition. Namely, we have , , , and . Note that the transition function is completely deterministic given input from the first two coordinates (as required) and is given by . This implies is an OR gate receiving input from both and .
At this point, the isomorphic cascade decomposition is complete. We have constructed an automaton for
that takes input from only itself and an automaton for
that takes input only from itself and earlier coordinates (i.e.,
and
). The mapping between the states of
X and the states of
, shown in
Figure 5b, is specified by identifying the binary labels (internal representations) each system uses to instantiate the abstract computational states
of the global state-transition diagram. Because
X and
operate on the same support (the same four binary states) the fact that they are isomorphic implies the difference between representations is nothing more than a permutation of the labels used to instantiate the computation. By choosing a specific labeling scheme based on isomorphic cascade decomposition, we can induce a logical architecture that is guaranteed to be feedback-free and has
. In this way, we have “unfolded” the feedback present in
X without affecting the size/efficiency of the system.
3. Results
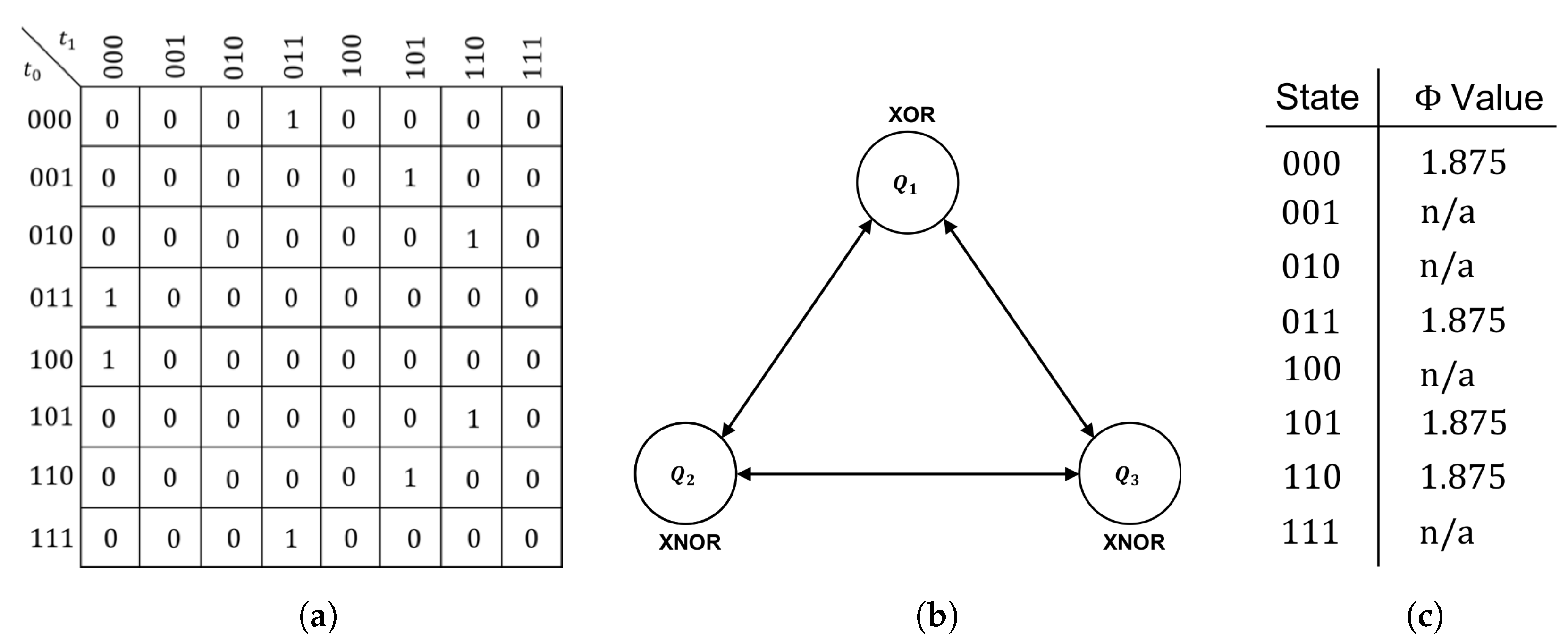
We are now prepared to demonstrate the existence of isomorphic feed-forward philosophical zombies in systems similar to those found in Oizumi et al. [
5]. To do so, we decompose the integrated system
Y shown in
Figure 6 into an isomorphic feed-forward philosophical zombie
of the form shown in
Figure 3. The system
Y, comprised of two
XNOR gates and one
XOR gate, clearly contains feedback between components and has
for all states for which
can be calculated (
Figure 6c). As in
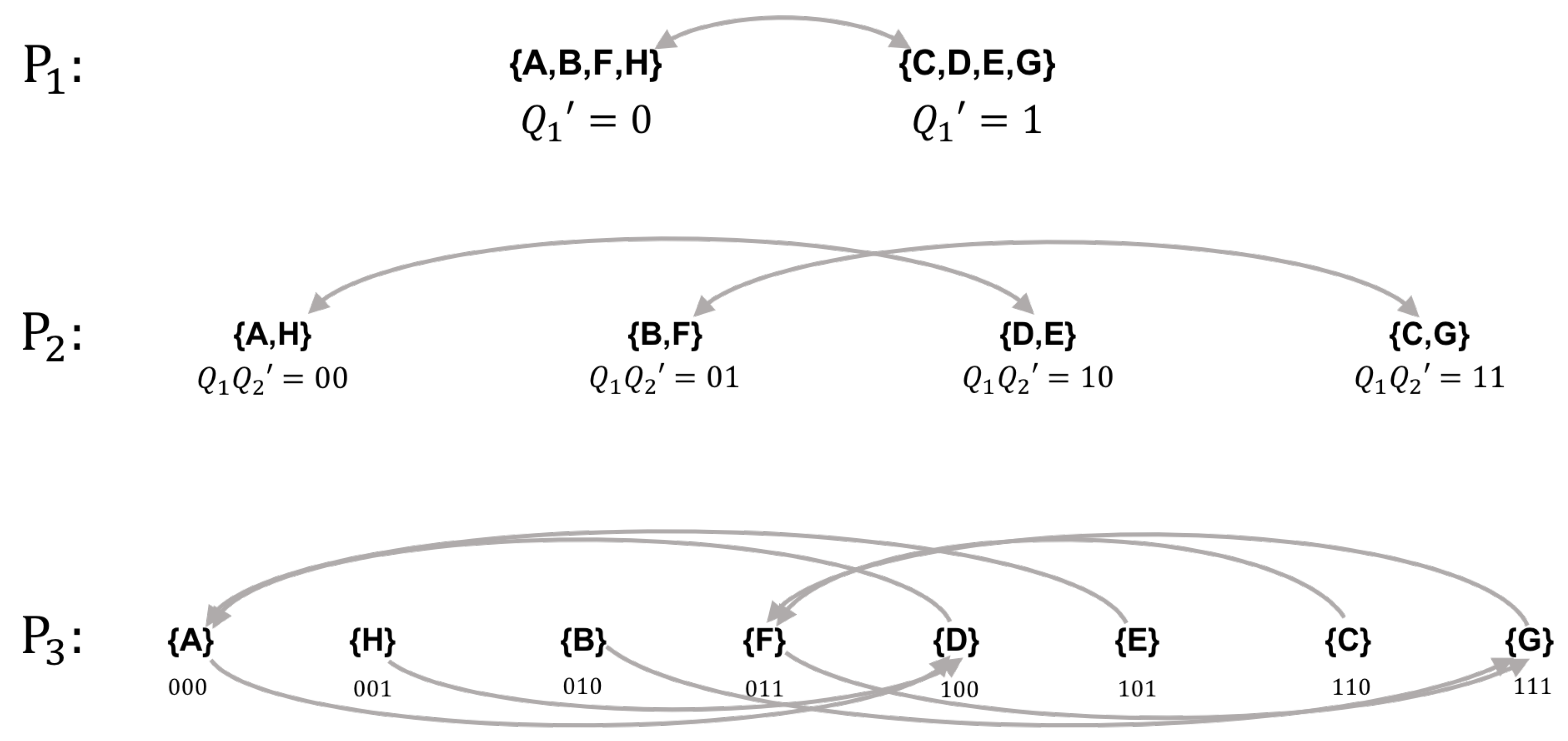
Section 2.3, the goal of the decomposition is an isomorphic relabeling of the finite-state machine representing the global behavior of the system, such that the induced logical architecture is strictly feed-forward.
We first evenly partition the state space of
Y into two blocks
and
. Under this partition,
transitions to
and
transitions to
, which implies the automaton representing the first coordinate in the new labeling scheme is a
NOT gate. Note that this choice is not unique, as we could just as easily have chosen a different preserved partition such as
and
, in which case the first coordinate would be a
COPY gate; as long as the partition is preserved, the choice here is arbitrary and amounts to selecting one of several different feed-forward logical architectures—all in cascade form. For the second preserved partition, we let
with
,
,
. and
. The transition function for the automaton representing the second coordinate, given by the movement of these blocks, is:
, which is again a
COPY gate receiving input from itself. The third and final partition
assigns each state to its own unique block. As is always the case, this last partition is trivially preserved because individual states are guaranteed to transition to a single block. The transition function for this coordinate, read off the bottom row of
Figure 7, is given by:
Using Karnuagh maps [
31], one can identify
as a
COPY gate receiving input from
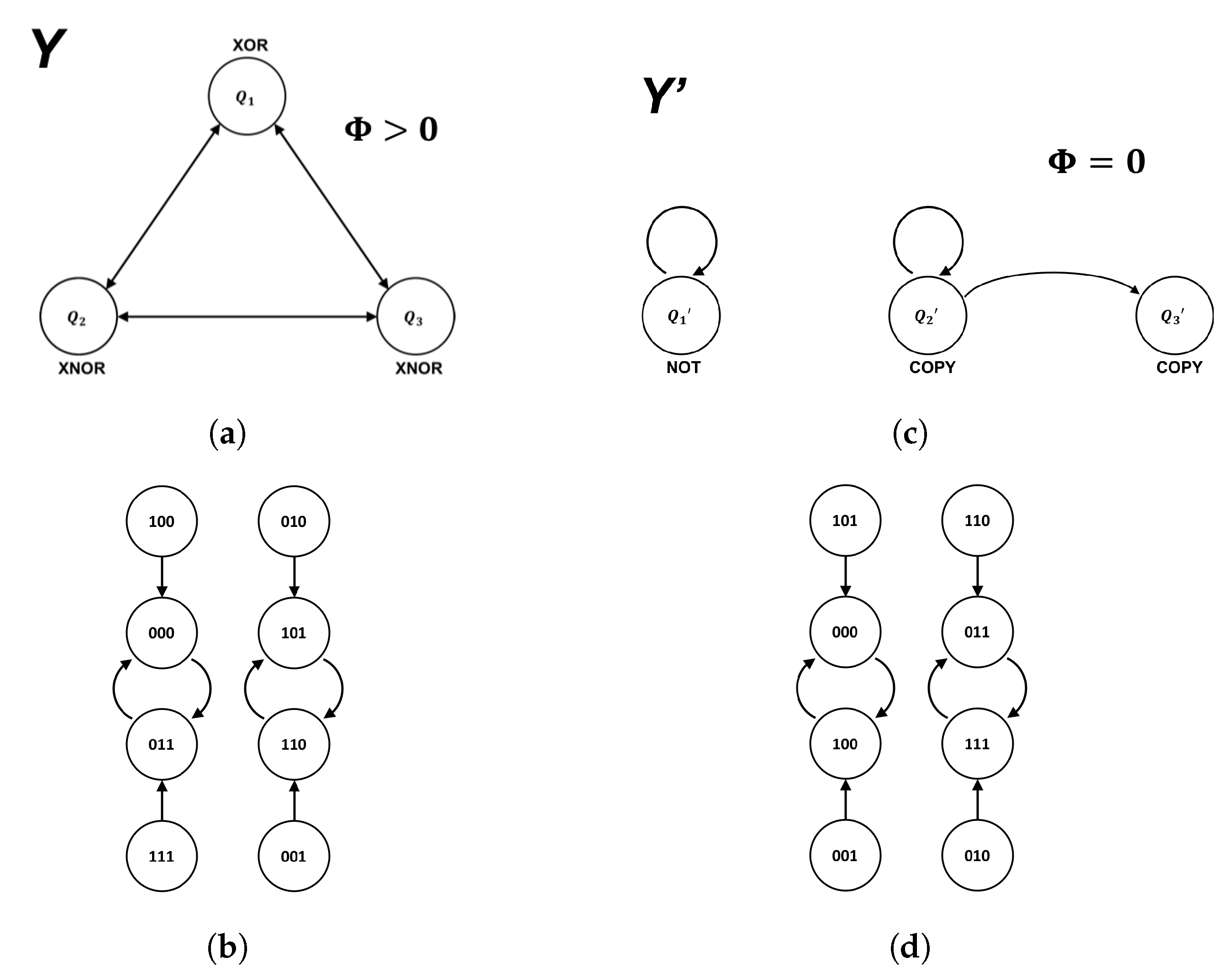
. With the specification of the logic for the third coordinate, the cascade decomposition is complete and the new labeling scheme is shown in
Figure 7. A side-by-side comparison of the original system
Y and the feed-forward system
is shown in
Figure 8. As required, the feed-forward system has
but executes the same sequence of state transitions as the original system, modulo a permutation of the labels used to instantiate the states of the global state-transition diagram.
4. Discussion
Behavior is most frequently described in terms of abstract states/stimuli, which are not tied to a specific representation (binary or otherwise). Examples include descriptors of mental states, such as being asleep or awake, etc.: these are representations of system states that must be defined by either an external observer or internally in the system performing the computation by its own logical implementation, but are not necessarily an intrinsic attribute of the computational states themselves (e.g., these states could be labeled with any binary assignment consistent with the state transition diagram of the computation). The analysis presented here is based on this premise that such that behavior is defined by the topology of the state-transition diagram, independent of a particular labeling scheme. Indeed, it is this premise that enables Krohn–Rhodes decomposition to be useful from an engineering perspective, as one can swap between logical architectures without affecting the operation of a system in any way.
Phenomenologically, consciousness is often associated with the concept of “top-down causation”, where “higher level” mental states exert causal control over lower level implementation [
32]. Under this view, the “additional information” provided by consciousness above and beyond non-conscious systems is considered to be functionally relevant by affecting how states transition to other states. Typically, this is associated with a macroscale intervening on a microscale, which historically has been problematic due to the issue of supervenience, whereby a system can be causally overdetermined if causation operates across multiple scales [
33]. Ellis and others described functional equivalence classes [
32,
34] as one means of implementing top-down causation without causal overdetermination because what does the actual causal work is a functional equivalence class of microstates, which as a class have the same causal consequences. Building on the idea of functional equivalence classes, our formalism introduces a different kind of top-down causation that also avoids issues of supervenience. In our formalism, consciousness is most appropriately thought of as a computation having to do with the topology (causal architecture) of global state transitions, rather than the labels of the states or a specific logical architecture. Thus, the computation/function describes a functional equivalence class of logical architectures that all implement the same causal relations among states, i.e., the functional equivalence class is the computational abstraction (macrostate), which can be implemented in any of a set of isomorphic physical architectures (microstates/physical implementations). There is no additional “room at the bottom” for a particular logical architecture to exert more causal influence when it instantiates a particular abstraction than another architecture instantiating the same abstraction, because the causal structure of the abstraction remains unchanged. Any measure of consciousness that changes under the isomorphism we introduce here, such as
, cannot therefore account for “additional information” related to executing a particular function, because of the existence of zombie systems within the same functional equivalence class.
It is important to recognize there exists an alternative perspective where one defines differences relevant to consciousness not in terms of abstract computation, but in terms of specific logical implementations, as IIT adopts. However, this does not address, in our view, whether isomorphic systems ultimately experience a phenomenological difference as there is no way to test that assumption other than accepting it axiomatically. In particular, for the examples we consider here, there is only one input signal, meaning there are not multiple ways to encode input from the environment. Therefore, there is no physical mechanism by which the environment can dictate a privileged internal representation. Instead, the choice of internal representation is arbitrary with respect to the environment and depends only on the physical constraints of the architecture of the system performing the computation. For a system as complex as the human brain, there are presumably many possible logical architectures that define an equivalence class capable of performing the same computation given the same input, differing only in how the states are internally represented (e.g., by how neurons are wired together). This could, for example, explain why humans brains all have the potential to be conscious despite differences in the particular wiring of their neurons. Why the internal representations that have evolved were selected for in the first place is likely important for understanding why consciousness emerged in the universe.
Historically within IIT, the presence of feedback is associated with
efficiency, such that unconscious feed-forward systems, e.g., those presented by Oizumi et al. [
5] and Doerig et al. [
15], operate under drastically different resource constraints than their conscious counterparts with feedback. This motivates arguments for an evolutionary advantage toward efficient representation and, by proxy,
/consciousness [
27]. Under isomorphic decomposition, however, systems with feedback can be assumed to have equivalent efficiency to their counterparts without feedback, because the size of the system and its state transitions are equivalent—demonstrating that
is fundamentally distinct from efficiency. This, in turn, implies there are no inherent evolutionary benefit to the presence or absence of
because it is not selectable as being distinctive to a particular computation an organism must perform for survival, but only how that computation is internally represented.
Given that isomorphic systems exhibit the same behavior, meaning that they take the exact same trajectory through state space, modulo a permutation of the labels used to represent the states, they can also be considered to be equally autonomous. This is because the internal states of isomorphic systems are in one-to-one correspondence (
Figure 5b), meaning the presence/absence of autonomy does not affect the transitions in the global state diagram of the system (e.g.,
Figure 8b,d). In our examples, the future state of the system as a whole is completely determined its current state for both the zombie system and its conscious counterpart. Similarly, the future state of each individual component within a given system is completely determined by its inputs (i.e., it is a deterministic logic gate). This presents a challenge for understanding in what sense a system with
can be said to be dictating its own future from within, while the system with
is not, as IIT suggests. The notion of autonomy that IIT adopts to address this is one of interdependence—autonomous systems rely on bi-directional information exchange between components while non-autonomous systems do not. However, given that each component can store only one bit of information, components cannot store
where the information came from (e.g., whether or not they are part of an integrated architecture). Since the information stored by the system as a whole is nothing more than the combined information stored by individual components, it is unclear to us why feedback between elements should result in autonomy while feed-forward connections between elements should not, given isomorphic state-transition diagrams.
This leads us to the central question of this manuscript: What is experienced as the isomorphic system with
cycles through its internal states that is not experienced by its counterpart with
? Since in our examples the environment is not dictating the representation of the input, and all state transitions are isomorphic, the representation and therefore the logic is arbitrary so long as a logical architecture is selected with the proper input-output map under all circumstances. In light of this, our formalism suggests any mathematical measure of consciousness, phenomenologically motivated or otherwise, must be invariant with respect to isomorphic state-transition diagrams. This minimal criterion implies measurable differences in consciousness are always associated with measurable differences in the computation being performed by the system (though the inverse need not be true), which is nothing more than precise mathematical enforcement of the precedent set by Turing [
14]. From this perspective, measures of consciousness should operate on the topology of the state-transition diagram, rather than the logic of a particular physical implementation. That is, they should probe the computational capacity of the system without being biased by a particular logical architecture—allowing identifying equivalence classes of physical systems that could have the same or similar conscious experience.
Our motivation in this work is to provide new roads to address the hard problem of consciousness by raising new questions. Our framework focuses attention on the fact that we currently lack a sufficiently formal understanding of the relationship between physical implementation and computation to truly address the hard problem. The logical architectures in
Figure 8a,c are radically different, and yet, they perform the same computation. The fact that this computation allows a feed-forward decomposition is a consequence of redundancies that allow a compressed description in terms of a feed-forward logical architecture. There are symmetries present in the computation that allow one to take advantage of shortcuts and reduce the computational load. This, in turn, shows up as flexibility in the logical architecture that can generate the computation. In other words, the computation in question does not appear to require the maximum computational power of a three-bit logical architecture. For sufficiently complex eight-state computations, however, the full capacity of a three-bit architecture is required, as there is no redundancy to compress. Such systems cannot be generated without feedback, as the presence of feedback is accompanied by indispensable functional consequences. In this case, the
computation is special because it cannot be efficiently represented without feedback—a relationship that can, in principle, be understood but is only tangentially accounted for in current formalisms. It is up to the community to decide if the causal mechanisms of consciousness are at the level of particular logical architectures or the computations they instantiate, our goal in this work is simply to point out where the distinction between the two sets of ideas is very apparent and clear-cut mathematically, so that additional progress can be made.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







