Chaotic Map with No Fixed Points: Entropy, Implementation and Control


Abstract
:1. Introduction
2. Chaotic Map
2.1. Dynamics of the Map
2.2. Entropy of the New Map
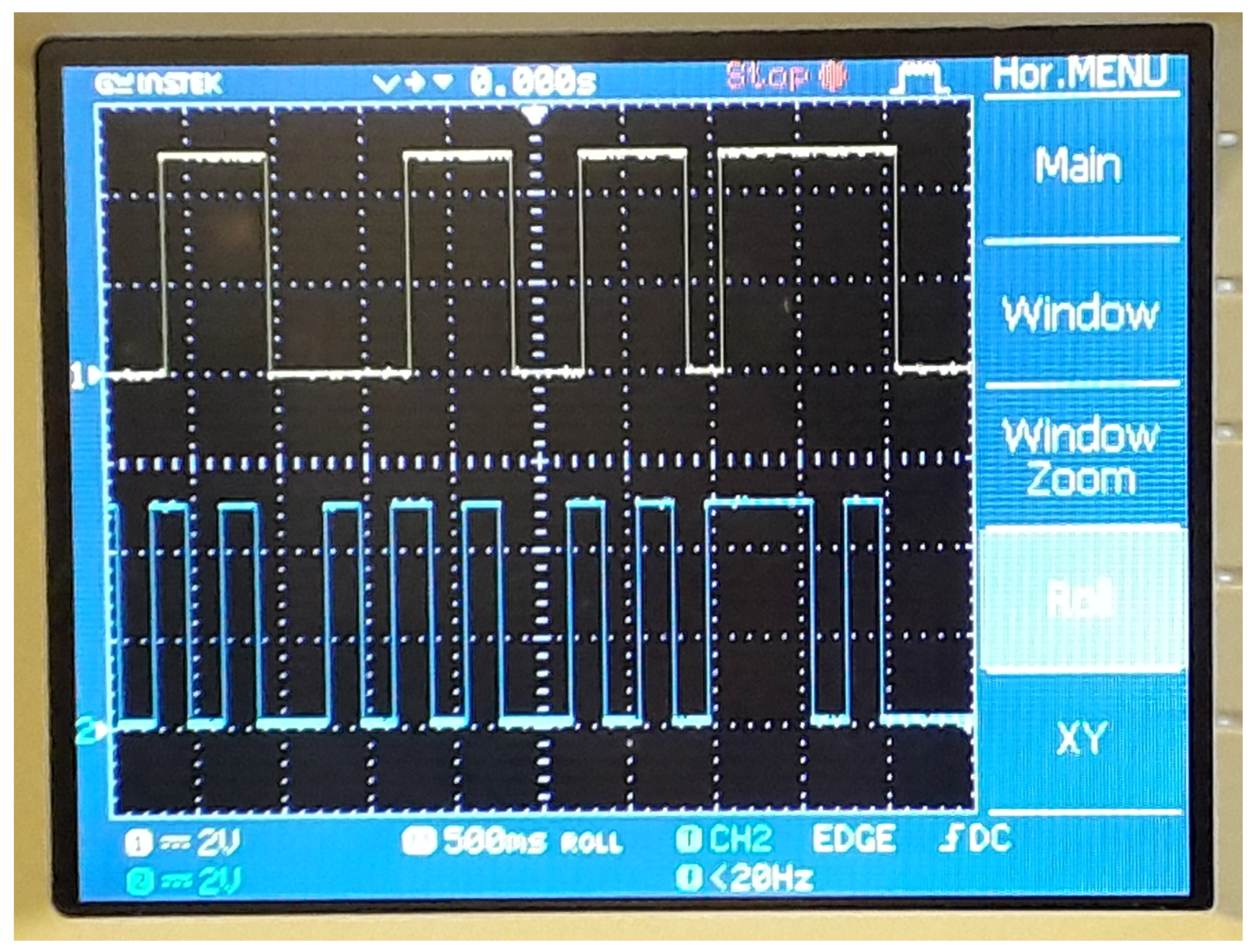
3. Implementation of the Map Using Microcontroller
4. Control Schemes for the Proposed Map
4.1. Stabilization
4.2. Synchronization
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pierre, C.; Jean-Pierre, E. Iterated Map on the Interval as Dynamical Systems; Springer: Berlin, Germany, 1980. [Google Scholar]
- Bahi, J.M.; Guyeux, C. Iterated Map on the Interval as Dynamical Systems; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Elaydi, S.N. Discrete Chaos: With Applications in Science and Engineering, 2nd ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2007. [Google Scholar]
- Gibson, W.T.; Wilson, W.C. Individual-based chaos: Extensions of the discrete logistic model. J. Theor. Biol. 2013, 339, 84–92. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Borujeni, S.; Ehsani, M. Modified logistic maps for cryptographic application. Appl. Math. 2015, 6, 773–782. [Google Scholar] [CrossRef]
- Valtierra, J.L.; Tlelo-Cuautle, E.; Rodriguez-Vazquez, A. A switched-capacitor skew-tent map implementation for random number generation. Int. J. Circuit Theor. Appl. 2017, 45, 305–315. [Google Scholar] [CrossRef]
- De la Fraga, L.G.; Torres-Perez, E.; Tlelo-Cuautle, E.; Mancillas-Lopez, C. Hardware implementation of pseudo-random number generators based on chaotic maps. Nonlinear Dyn. 2017, 90, 1661–1670. [Google Scholar] [CrossRef]
- May, R.M. Simple mathematical models with very complicated dynamics. Nature 1976, 261, 459–467. [Google Scholar] [CrossRef]
- Hénon, M.A. A two-dimensional mapping with a strange attractor. Commun. Math. Phys. 1976, 50, 69–77. [Google Scholar] [CrossRef]
- Lozi, R. Un atracteur étrange du type attracteur de Hénon. J. Phys. 1978, 39, 9–10. [Google Scholar]
- Nejati, H.; Beirami, A.; Ali, W. Discrete-time chaotic-map truly random number generators: Design, implementation, and variability analysis of the zigzag map. Analog Integr. Circuits Signal Process. 2012, 73, 363–374. [Google Scholar] [CrossRef]
- Scheffer, M.; Bascompte, J.; Brock, W.A.; Brovkin, V.; Carpenter, S.R.; Dakos, V.; Held, H.; van Nes, E.H.; Rietkerk, M.; Sugihara, G. Early-warning singals for critical transitions. Nature 2009, 461, 53–59. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V.; Kuznetsova, O.A.; Seldedzhi, S.M.; Vagaitsev, V.I. Hidden oscillations in dynamical systems. Trans. Syst. Control 2011, 6, 54–67. [Google Scholar]
- Leonov, G.A.; Kuznetsov, N.V. Hidden attractors in dynamical systems: From hidden oscillation in Hilbert-Kolmogorov, Aizerman and Kalman problems to hidden chaotic attractor in Chua circuits. Int. J. Bifurc. Chaos 2013, 23, 1330002. [Google Scholar] [CrossRef]
- Dudkowski, D.; Jafari, S.; Kapitaniak, T.; Kuznetsov, N.; Leonov, G.; Prasad, A. Hidden attractors in dynamical systems. Phys. Rep. 2016, 637, 1–50. [Google Scholar] [CrossRef]
- Jafari, S.; Pham, V.T.; Moghtadaei, M.; Kingni, S.T. The relationship between chaotic maps and some chaotic systems with hidden attractors. Int. J. Bifurc. Chaos 2016, 26, 1650211. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, Y.; Wei, Z.; Zhang, L. Hidden chaotic attractors in a class of two-dimensional maps. Nonlinear Dyn. 2016, 85, 2719–2727. [Google Scholar] [CrossRef] [Green Version]
- Ouannas, A.; Wang, X.; Khennaoui, A.A.; Bendoukha, S.; Pham, V.T.; Alsaadi, F. Fractional form of a chaotic map without fixed points: Chaos, entropy and control. Entropy 2018, 20, 720. [Google Scholar] [CrossRef]
- Xu, G.; Shekofteh, Y.; Akgul, A.; Li, C.; Panahi, S. New chaotic system with a self-excited attractor: Entropy measurement, signal encryption, and parameter estimation. Entropy 2018, 20, 86. [Google Scholar] [CrossRef]
- Kuznetsov, N.V.; Leonov, G.A.; Mokaev, T.N.; Prasad, A.; Shrimali, M.D. Finite–time Lyapunov dimension and hidden attractor of the Rabinovich system. Nonlinear Dyn. 2018, 92, 267–285. [Google Scholar] [CrossRef]
- Borda, M. Fundamentals in Information Theory and Coding; Springer: Berlin, Germany, 2011. [Google Scholar]
- Gray, R.M. Entropy and Information Theory; Springer: Berlin, Germany, 2011. [Google Scholar]
- Bossomaier, T.; Barnett, L. An Introduction to Transfer Entropy: Information Flow in Complex Systems; Springer: Berlin, Germany, 2016. [Google Scholar]
- Eckmann, J.; Ruelle, D. Ergodic theory of chaos and strange attractors. Rev. Mod. Phys. 1985, 57, 617. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wang, H. Complexity analysis and DSP implementation of the fractional-order Lorenz hyperchaotic system. Entropy 2015, 17, 8299–8311. [Google Scholar] [CrossRef]
- He, S.; Li, C.; Sun, K.; Jafari, S. Multivariate multiscale complexity analysis of self-reproducing chaotic systems. Entropy 2018, 20, 556. [Google Scholar] [CrossRef]
- Munoz-Pacheco, J.M.; Zambrano-Serrano, E.; Volos, C.; Jafari, S.; Kengne, J.; Rajagopal, K. A New Fractional-Order Chaotic System with Different Families of Hidden and Self-Excited Attractors. Entropy 2018, 20, 564. [Google Scholar] [CrossRef]
- Pincus, S. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef]
- Pincus, S. Approximate entropy (ApEn) as a complexity measure. Chaos Interdiscipl. J. Nonlinear Sci. 1995, 5, 110–117. [Google Scholar] [CrossRef]
- Wang, C.; Ding, Q. A new two-dimensional map with hidden attractors. Entropy 2018, 20, 322. [Google Scholar] [CrossRef]
- Garcia-Martinez, M.; Campos-Canton, E. Pseudo-random bit generator based on multi-modal maps. Nonlinear Dyn. 2015, 82, 2119–2131. [Google Scholar] [CrossRef]
- Francois, M.; Grosges, T.; Barchiesi, D.; Erra, R. Pseudo-random number generator based on mixing of three chaotic maps. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 887–895. [Google Scholar] [CrossRef]
- Murillo-Escobar, M.A.; Cruz-Hernandez, C.; Cardoza-Avendano, L.; Mendez-Ramirez, R. A novel pseudorandom number generator based on pseudorandomly enhanced logistic map. Nonlinear Dyn. 2017, 87, 407–425. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Ma, J.; He, H. A pseudorandom number generator based on piecewise logistic map. Nonlinear Dyn. 2016, 83, 2373–2391. [Google Scholar] [CrossRef]
- Lambic, D. A novel method of S-box design based on chaotic map and composition method. Chaos Solitons Fractals 2014, 58, 16–21. [Google Scholar] [CrossRef]
- Mazloom, S.; Eftekhari-Moghadam, A.M. Color image encryption based on Coupled Nonlinear Chaotic Map. Chaos Solitons Fractals 2009, 42, 1745–1754. [Google Scholar] [CrossRef]
- La Hoz, M.Z.D.; Acho, L.; Vidal, Y. An experimental realization of a chaos-based secure communication using Arduino microcontrollers. Sci. World J. 2015, 2015, 123080. [Google Scholar]
- Acho, L. A discrete-time chaotic oscillator based on the logistic map: A secure communication scheme and a simple experiment using Arduino. J. Frankl. Inst. 2015, 352, 3113–3121. [Google Scholar] [CrossRef] [Green Version]
- Teikari, P.; Najjar, R.P.; Malkki, H.; Knoblauch, K.; Dumortier, D.; Gronfer, C.; Cooper, H.M. An inexpensive Arduino-based LED stimulator system for vision research. J. Neurosci. Methods 2012, 211, 227–236. [Google Scholar] [CrossRef] [PubMed]
- Faugel, H.; Bobkov, V. Open source hard- and software: Using Arduino boards to keep old hardware running. Fusion Eng. Des. 2013, 88, 1276–1279. [Google Scholar] [CrossRef] [Green Version]
- Castaneda, C.E.; Lopez-Mancilla, D.; Chiu, R.; Villafana-Rauda, E.; Orozco-Lopez, O.; Casillas-Rodriguez, F.; Sevilla-Escoboza, R. Discrete-time neural synchronization between an Arduino microcontroller and a Compact Development System using multiscroll chaotic signals. Chaos Solitons Fractals 2019, 119, 269–275. [Google Scholar] [CrossRef]
- Ouannas, A.; Odibat, Z. Generalized synchronization of different dimensional chaotic dynamical systems in discrete-time. Nonlinear Dyn. 2015, 81, 765–771. [Google Scholar] [CrossRef]
- Ouannas, A.; Grassi, G. GA new approach to study co–existence of some synchronization types between chaotic maps with different dimensions. Nonlinear Dyn. 2016, 86, 1319–1328. [Google Scholar] [CrossRef]
- Ouannas, A.; Odibat, Z.; Shawagfeh, N.; Alsaedi, A.; Ahmad, B. Universal chaos synchronization control laws for general quadratic discrete systems. Appl. Math. Model. 2017, 45, 636–641. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | c | ApEn |
|---|---|---|
| 1 | 1.985 | 0.0306 |
| 2 | 1.99 | 0.2142 |
| 3 | 1.995 | 0.2184 |
| 4 | 2 | 0.2525 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huynh, V.V.; Ouannas, A.; Wang, X.; Pham, V.-T.; Nguyen, X.Q.; Alsaadi, F.E. Chaotic Map with No Fixed Points: Entropy, Implementation and Control. Entropy 2019, 21, 279. https://doi.org/10.3390/e21030279
Huynh VV, Ouannas A, Wang X, Pham V-T, Nguyen XQ, Alsaadi FE. Chaotic Map with No Fixed Points: Entropy, Implementation and Control. Entropy. 2019; 21(3):279. https://doi.org/10.3390/e21030279
Chicago/Turabian StyleHuynh, Van Van, Adel Ouannas, Xiong Wang, Viet-Thanh Pham, Xuan Quynh Nguyen, and Fawaz E. Alsaadi. 2019. "Chaotic Map with No Fixed Points: Entropy, Implementation and Control" Entropy 21, no. 3: 279. https://doi.org/10.3390/e21030279
APA StyleHuynh, V. V., Ouannas, A., Wang, X., Pham, V. -T., Nguyen, X. Q., & Alsaadi, F. E. (2019). Chaotic Map with No Fixed Points: Entropy, Implementation and Control. Entropy, 21(3), 279. https://doi.org/10.3390/e21030279