Analytic Expressions for Radar Sea Clutter WSSUS Scattering Functions †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results
2.1. Mathematical Background
- The LTV impulse response is only valid over a single coherent processing interval (CPI) of N transmitted pulses
- Over a single CPI, the range to target(s) is roughly constant
- Relative motion produces a Doppler shift on the carrier only and does not introduce time dilation of the pulse. The conditions for this assumption to be valid are that , where is the time-bandwidth product of the waveform and is the maximum range rate [47] (p. 382).
2.2. WSSUS Processes
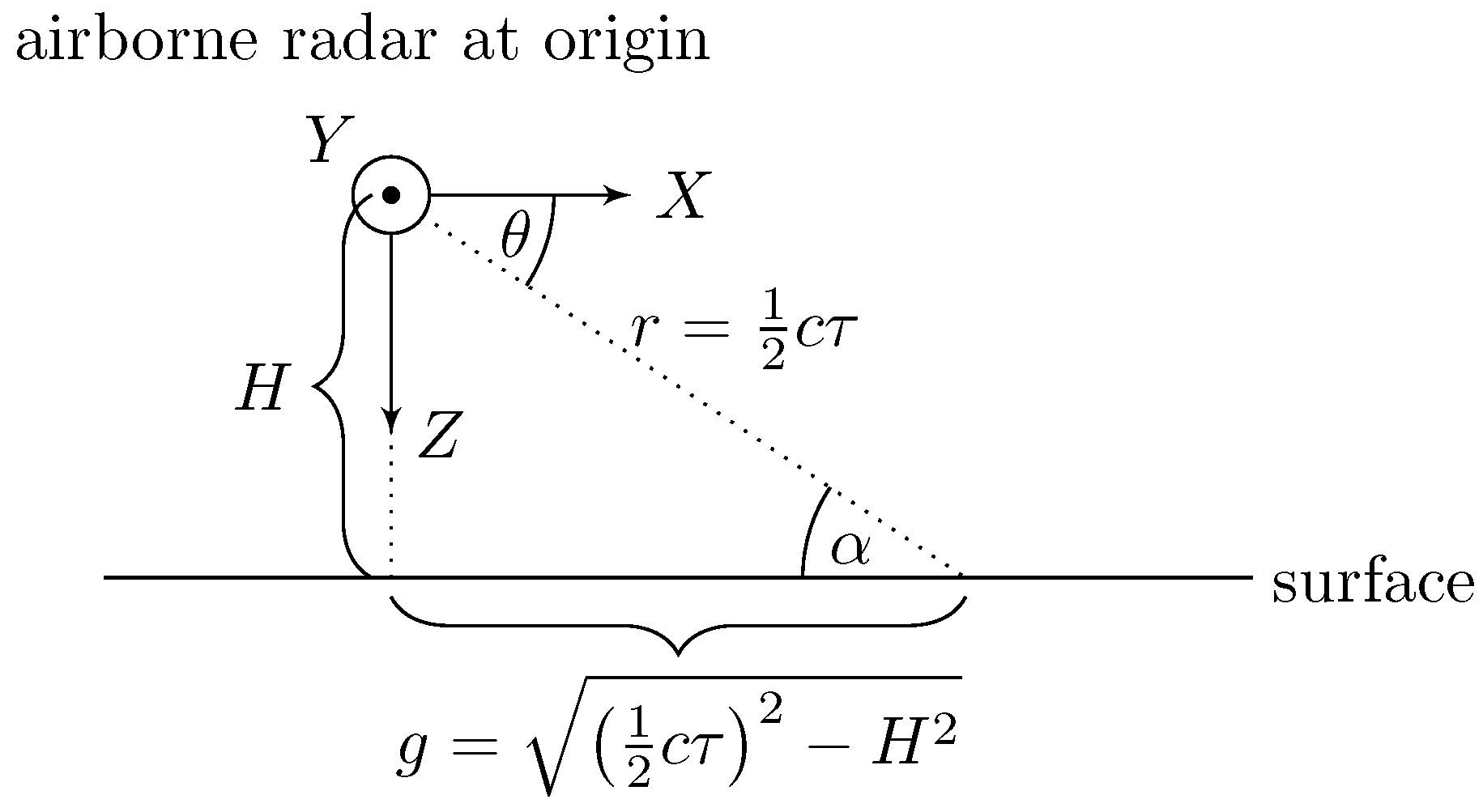
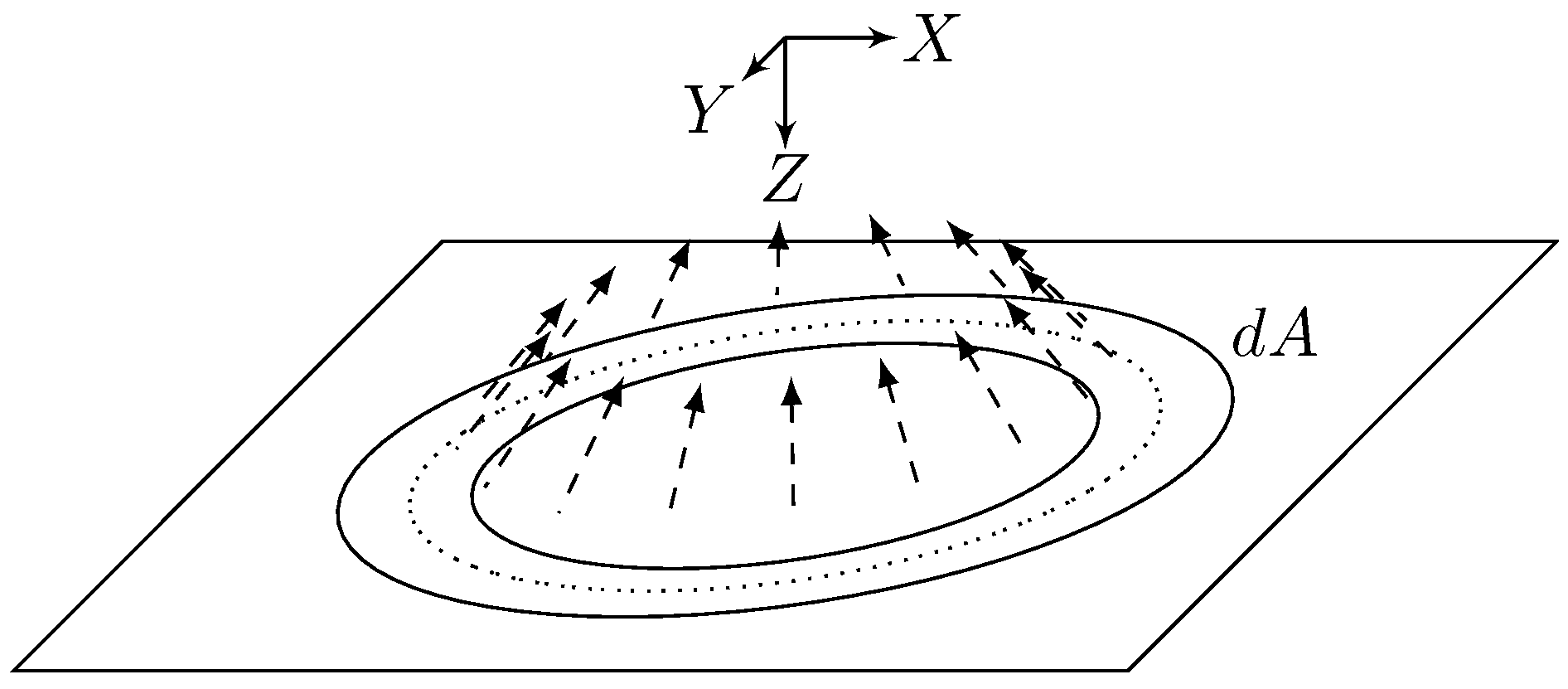
2.3. Simulation Geometry
- = transmit power
- = incremental received power from isorange ring at delay
- = azimuth and depression angles relative to platform
- = grazing angle, which equals in a flat earth model
- = one-way antenna power gain
- = carrier wavelength
- surface normalized radar cross section (NRCS)
- = = incremental area of isorange ring at delay .
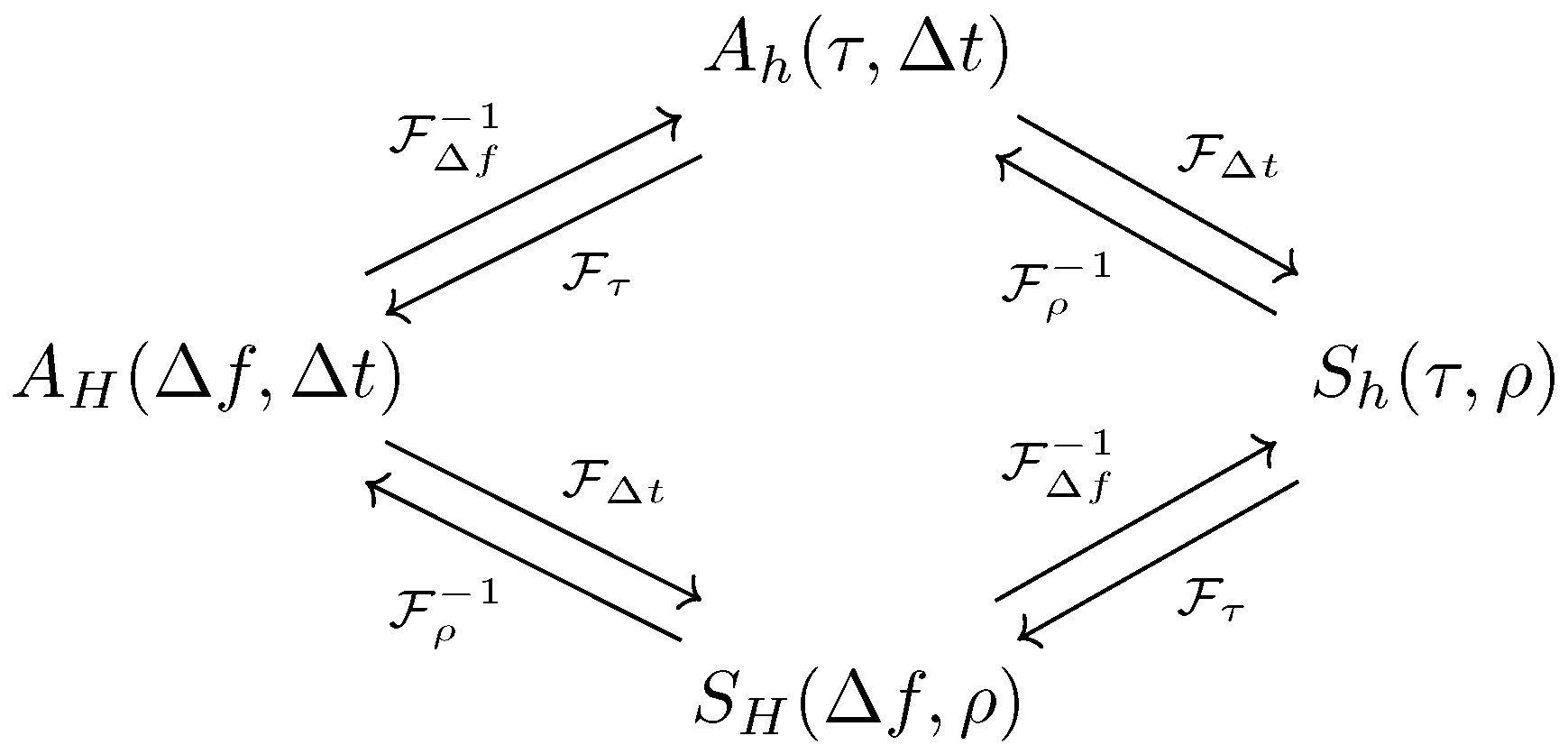
2.4. WSSUS System Function Derivations
2.5. Important Special Cases
2.5.1. No ICM
2.5.2. Side-Looking Antenna, Level Flight Path
2.5.3. Arbitrary Orientation
2.6. Output Time-Frequency Power Distribution
2.7. ICM Spectrum Characterization
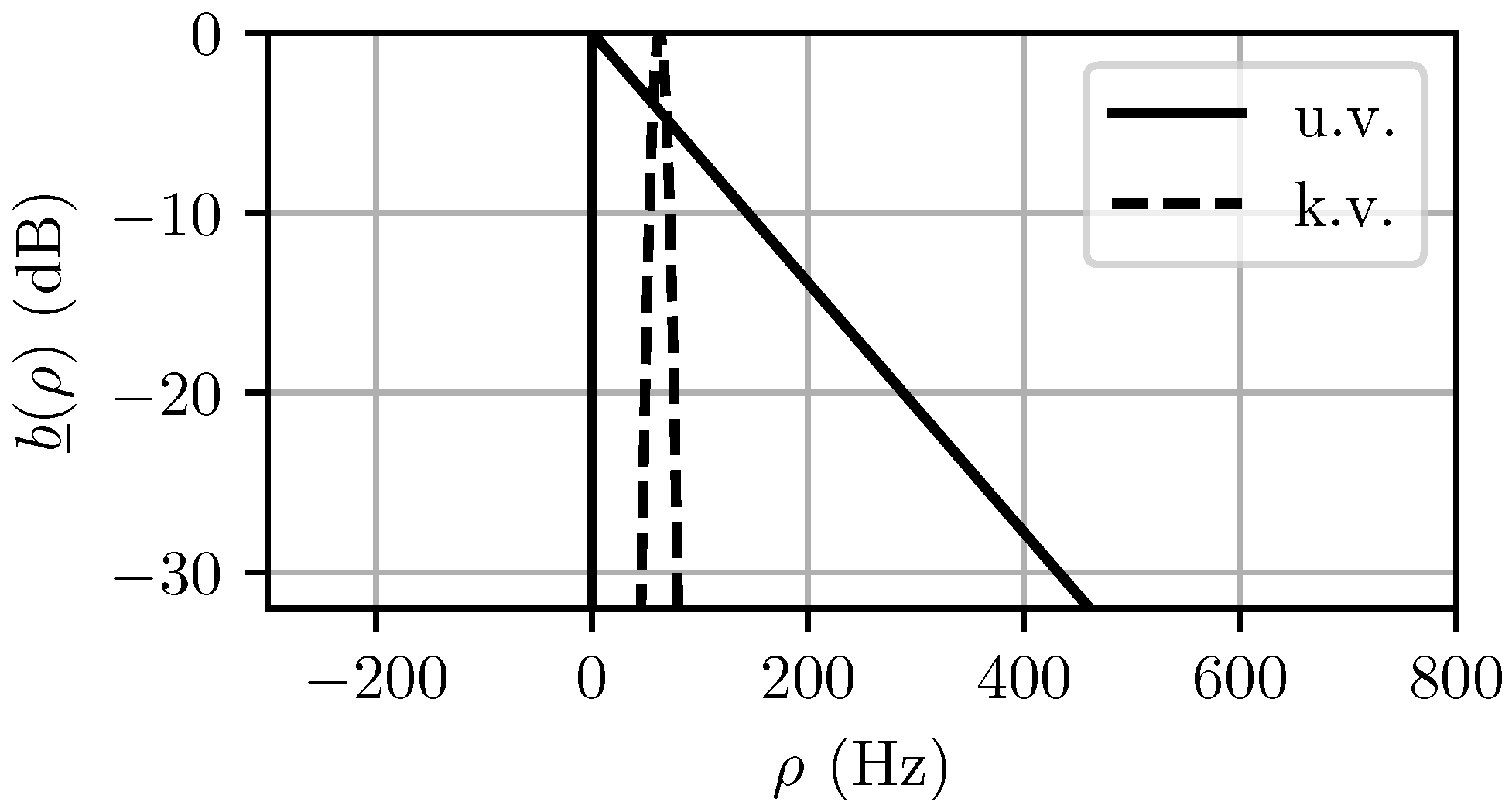
2.7.1. Maximum Entropy Prior
2.7.2. Known Mean, Unknown Variance
- The mean wave speed (and hence mean Doppler shift) is proportional to the wind speed. For example, it is commonly assumed that the wave speed is 1/8th the wind speed [57], and
- The wind velocity vector has no Z component, and
- The waves move in the same direction as the wind,
- ,
- .
2.7.3. Known Mean and Variance
2.7.4. Distribution Comparison
- kHz
- pulses
- Dolph-Chebyshev window with −55 dB sidelobes
- Hz
- Hz2
- Overall clutter to noise ratio (CNR) = 20 dB
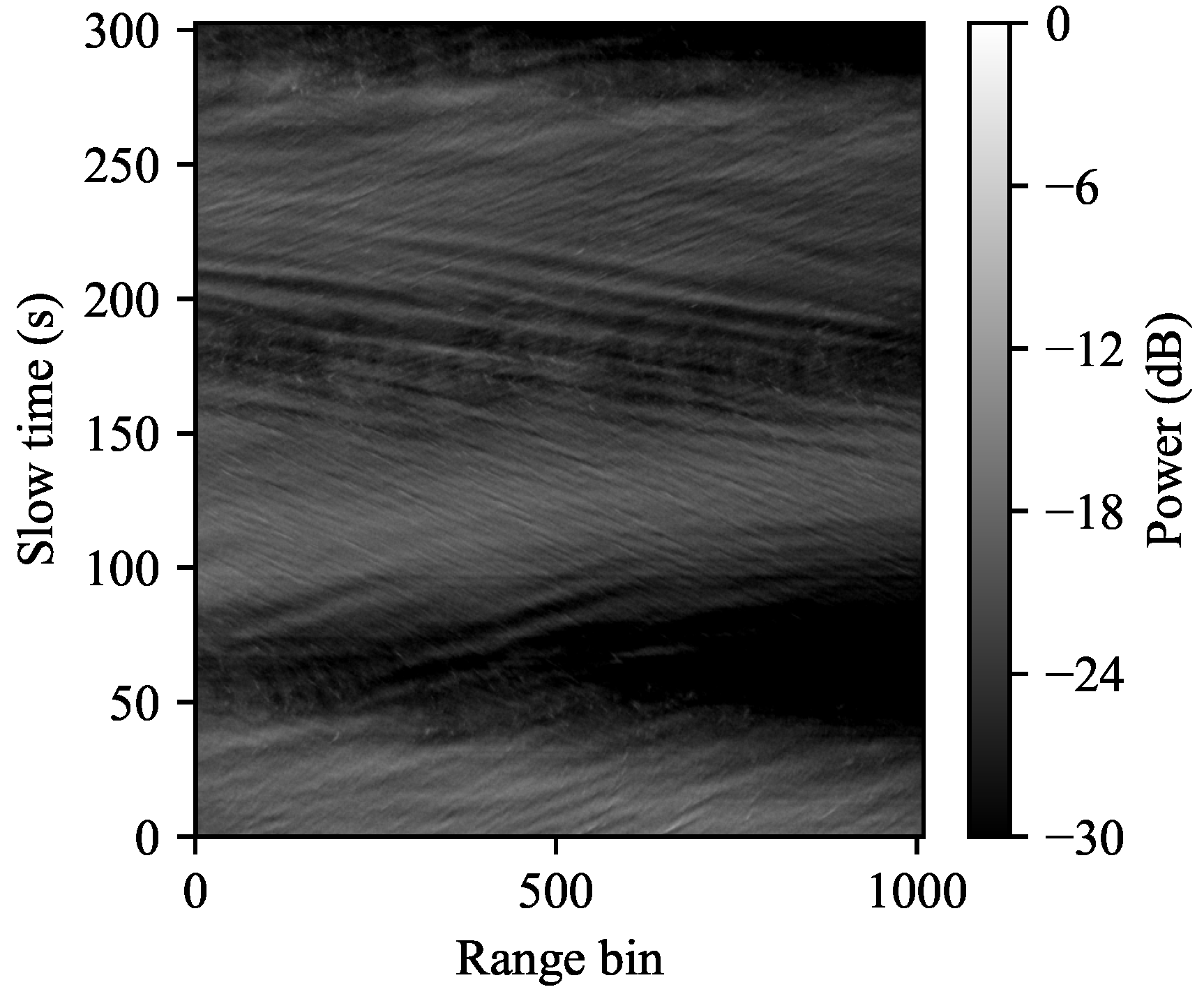
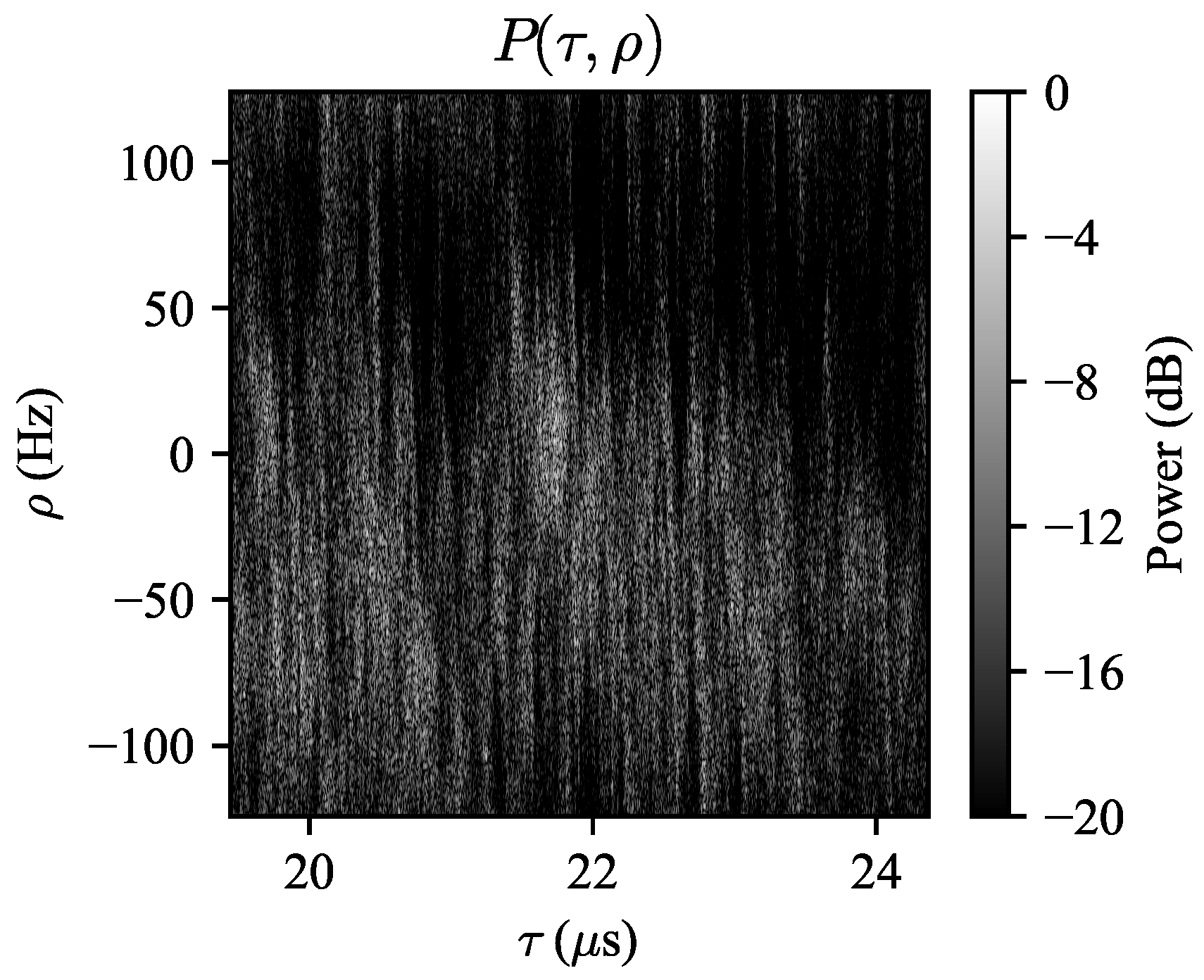
2.8. Experimental Validation
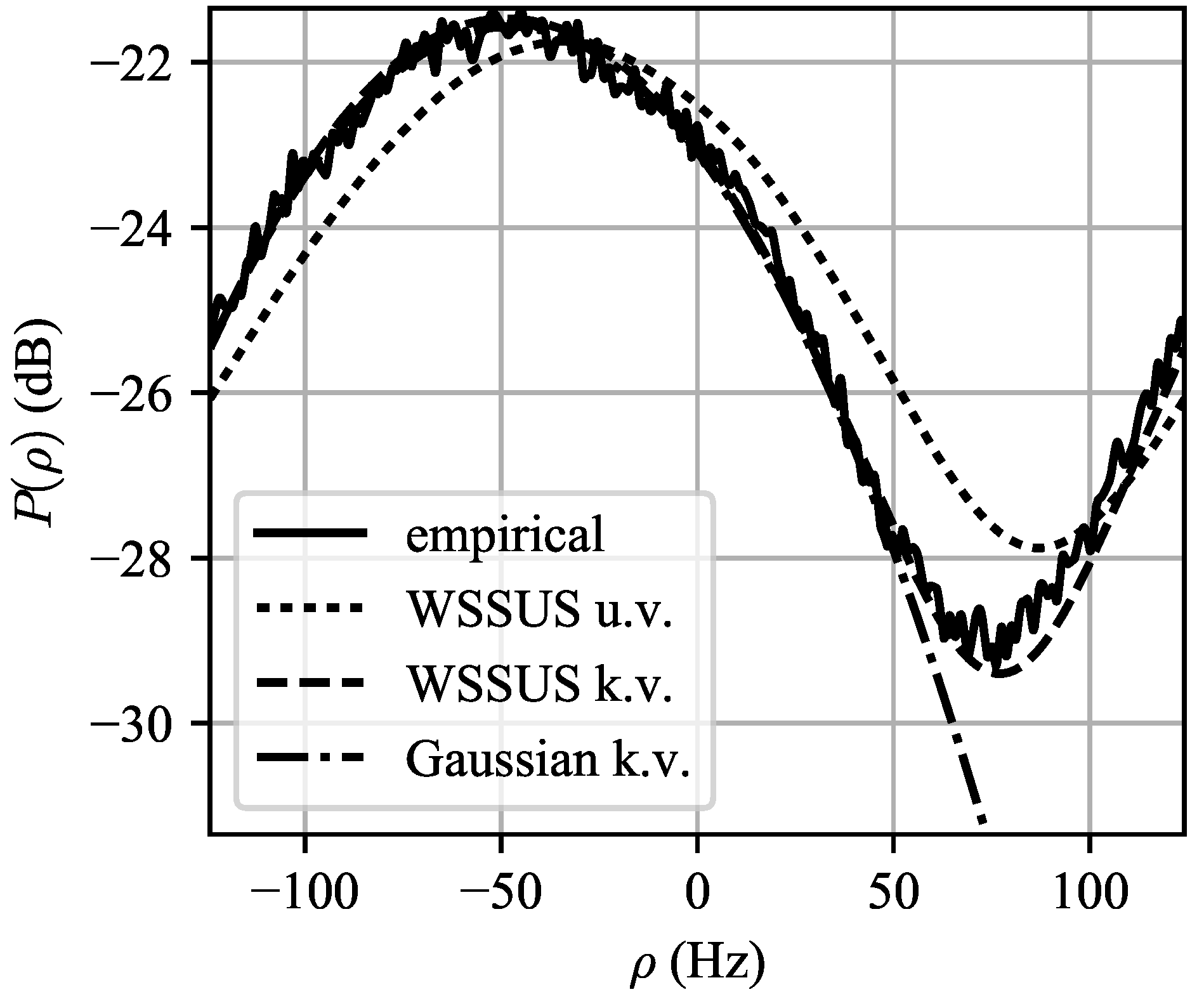
2.8.1. Doppler Spectrum Modeling
- Wave motion away from the radar, as described in Section 2.7.2, of approximately 0.71 m/s,
- Aircraft crabbing (i.e., translational motion in the Y-direction),
- Antenna pointing errors; using Equation (23) yields a pointing error of approximately 0.4 degrees,
- Some combination of the above effects.
2.8.2. Validation of WSSUS Assumption
3. Discussion and Conclusions
4. Materials and Methods
Funding
Acknowledgments
Conflicts of Interest
References
- Cooke, C.D. Scattering function approach for modeling time-varying sea clutter returns. In Proceedings of the 2018 IEEE Radar Conference (RadarConf), Oklahoma City, OK, USA, 23–27 April 2018. [Google Scholar]
- Bello, P. Characterization of randomly time-variant linear channels. IEEE Trans. Commun. Syst. 1963, 11, 360–393. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Matz, G.; Bolcskei, H.; Hlawatsch, F. Time-frequency foundations of communications: Concepts and tools. IEEE Signal Process. Mag. 2013, 30, 87–96. [Google Scholar] [CrossRef]
- Matz, G. On non-WSSUS wireless fading channels. IEEE Trans. Wirel. Commun. 2005, 4, 2465–2478. [Google Scholar] [CrossRef]
- Matolak, D.W. Channel modeling for vehicle-to-vehicle communications. IEEE Commun. Mag. 2008, 46, 76–83. [Google Scholar] [CrossRef]
- Paetzold, M.; Gutierrez, C.A. Definition and analysis of quasi-stationary intervals of mobile radio channels–invited paper. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Walter, M.; Shutin, D.; Dammann, A. Time-variant Doppler PDFs and characteristic functions for the vehicle-to-vehicle channel. IEEE Trans. Veh. Technol. 2017, 66, 10748–10763. [Google Scholar] [CrossRef]
- Clarke, R.H. A statistical theory of mobile-radio reception. Bell Syst. Tech. J. 1968, 47, 957–1000. [Google Scholar] [CrossRef]
- Jakes, W.C. Microwave Mobile Communications; Wiley-IEEE Press: Hoboken, NJ, USA, 1974. [Google Scholar]
- Aulin, T. A modified model for the fading signal at a mobile radio channel. IEEE Trans. Veh. Technol. 1979, 28, 182–203. [Google Scholar] [CrossRef]
- Feng, T.; Field, T.R. Statistical analysis of mobile radio reception: An extension of Clarke’s model. IEEE Trans. Commun. 2008, 56, 2007–2012. [Google Scholar] [CrossRef]
- Matz, G. Time-frequency characterization of random time-varying channels. In Time-Frequency Signal Analysis and Processing: A Comprehensive Reference; Boashash, B., Ed.; Academic Press: Cambridge, MA, USA, 2016; Chapter 9; pp. 554–561. [Google Scholar]
- Kivinen, J.; Zhao, X.; Vainikainen, P. Empirical characterization of wideband indoor radio channel at 5.3 GHz. IEEE Trans. Antennas Propag. 2001, 49, 1192–1203. [Google Scholar] [CrossRef]
- Sadowsky, J.S.; Kafedziski, V. On the correlation and scattering functions of the WSSUS channel for mobile communications. IEEE Trans. Veh. Technol. 1998, 47, 270–282. [Google Scholar] [CrossRef]
- Ziomek, L.J. A Scattering Function Approach to Underwater Acoustic Detection and Signal Design. Ph.D. Thesis, The Pennsylvania State University, Centre County, PA, USA, 1981. [Google Scholar]
- Ziomek, L.J.; Sibul, L.H. Broadband and narrow-band signal-to-interference ratio expressions for a doubly spread target. J. Acoust. Soc. Am. 1982, 72, 804–819. [Google Scholar] [CrossRef]
- Ricker, D.; Cutezo, A. Estimation of coherent detection performance for spread scattering in reverberation-noise mixtures. J. Acoust. Soc. Am. 2000, 107, 1978–1986. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Kay, S.; Raghavan, R.S. Waveform design for doubly spread targets detection. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 49–54. [Google Scholar] [CrossRef]
- Zhu, Z.; Kay, S.; Raghavan, R.S. Locally optimal radar waveform design for detecting doubly spread targets in colored noise. IEEE Signal Process. Lett. 2018, 25, 833–837. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory; John Wiley & Sons: Hoboken, NJ, USA, 1971; Volume 3. [Google Scholar]
- Sibul, L.E. Optimum detection and estimation in stochastic transmission media. In Applied Stochastic Processes; Academic Press: Cambridge, MA, USA, 1980; pp. 247–267. [Google Scholar]
- Sibul, L.H.; Titlebaum, E.L. Signal design for detection of targets in clutter. Proc. IEEE 1981, 69, 481–482. [Google Scholar] [CrossRef]
- Ziomek, L.J.; Sibul, L.H. Maximation of the signal-to-interference ratio for a doubly spread target: Problems in nonlinear programming. Signal Process. 1983, 5, 355–368. [Google Scholar] [CrossRef]
- Sibul, L.H.; Fowler, M.L.; Harbison, G.J. Optimum array processing and representation of nonstationary random scattering. In Proceedings of the Twenty-Second Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 31 October–2 November 1988; Volume 1, pp. 431–435. [Google Scholar] [CrossRef]
- Sibul, L.H.; Roan, M.J.; Hillsley, K.L. Wavelet transform techniques for time-varying propagation and scattering characterization. In Proceedings of the Conference Record of Thirty-Second Asilomar Conference on Signals, Systems and Computers (Cat. No.98CH36284), Pacific Grove, CA, USA, 1–4 November 1998; Volume 2, pp. 1644–1649. [Google Scholar] [CrossRef]
- Guerci, J.R. Theory and application of covariance matrix tapers for robust adaptive beamforming. IEEE Trans. Signal Process. 1999, 47, 977–985. [Google Scholar] [CrossRef]
- Guerci, J.R.; Bergin, J.S. Principal components, covariance matrix tapers, and the subspace leakage problem. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 152–162. [Google Scholar] [CrossRef]
- Rosenberg, L. Comparison of bi-modal coherent sea clutter simulation techniques. IET Radar Sonar Navig. 2019, 13, 1519–1529. [Google Scholar] [CrossRef]
- Gaarder, N. Scattering function estimation. IEEE Trans. Inf. Theory 1968, 14, 684–693. [Google Scholar] [CrossRef]
- Nguyen, L.T.; Senadji, B.; Boashash, B. Scattering function and time-frequency signal processing. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing. Proceedings (Cat. No.01CH37221), Salt Lake City, UT, USA, 7–11 May 2001; Volume 6, pp. 3597–3600. [Google Scholar] [CrossRef]
- Kay, S.M.; Doyle, S.B. Rapid estimation of the range-Doppler scattering function. IEEE Trans. Signal Process. 2003, 51, 255–268. [Google Scholar] [CrossRef]
- Artes, H.; Matz, G.; Hlawatsch, F. Unbiased scattering function estimators for underspread channels and extension to data-driven operation. IEEE Trans. Signal Process. 2004, 52, 1387–1402. [Google Scholar] [CrossRef]
- Allemand, V. Estimation of the Scattering Function of Fading Channels For Acoustic Communications in Shallow Waters; Florida Atlantic University: Boca Raton, FL, USA, 2005. [Google Scholar]
- Van Walree, P. Channel Sounding for Acoustic Communications: Techniques and Shallow-Water Examples; Technical Report FFI-rapport 2011/00007; Norwegian Defence Research Establishment (FFI): Horten, Norway, 2011. [Google Scholar]
- Yin, X.; Zuo, Q.; Zhong, Z.; Lu, S.X. Delay-Doppler frequency power spectrum estimation for vehicular propagation channels. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; pp. 3434–3438. [Google Scholar]
- Boayue, A. Characterization of Underwater Acoustic Communication Channels: Statistical Characteristics of the Underwater Multipath Channnels. Master’s Thesis, Institutt for Elektronikk og Telekommunikasjon, Oslo, Norway, 2013. [Google Scholar]
- Oktay, O.; Pfander, G.E.; Zheltov, P. Reconstruction of the scattering function of overspread radar targets. IET Signal Process. 2014, 8, 1018–1024. [Google Scholar] [CrossRef] [Green Version]
- Pfander, G.E.; Zheltov, P. Identification of stochastic operators. Appl. Comput. Harmon. Anal. 2014, 36, 256–279. [Google Scholar] [CrossRef]
- Pfander, G.E.; Zheltov, P. Sampling of stochastic operators. IEEE Trans. Inf. Theory 2014, 60, 2359–2372. [Google Scholar] [CrossRef]
- Pfander, G.E.; Zheltov, P. Estimation of overspread scattering functions. IEEE Trans. Signal Process. 2015, 63, 2451–2463. [Google Scholar] [CrossRef]
- Jarvis, D.E.; Cooke, C.D. Application of Statistical Linear Time-Varying System Theory to Modeling of High Grazing Angle Sea Clutter; Technical Report NRL/MR/5750–17-9747; U.S. Naval Research Laboratory: Washington, DC, USA, 2017. [Google Scholar]
- Cooke, C.D.; Jarvis, D.E. Application of a Statistical Linear Time-Varying System Model of High Grazing Angle Sea Clutter for Computing Interference Power; Technical Report NRL/MR/5753–17-9744; U.S. Naval Research Laboratory: Washington, DC, USA, 2017. [Google Scholar]
- Jaynes, E.T. Probability Theory: The Logic of Science; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Mardia, K.V.; Jupp, P.E. Directional Statistics; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Rosenberg, L.; Watts, S.; Bocquet, S.; Ritchie, M. Characterisation of the Ingara HGA dataset. In Proceedings of the 2015 IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 27–32. [Google Scholar] [CrossRef]
- Rihaczek, A.W. Principles of High Resolution Radar; McGraw-Hill: New York, NY, USA, 1969. [Google Scholar]
- Proakis, J.; Salehi, M. Digital Communications, 5th ed.; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Ward, K.; Tough, R.; Watts, S. Sea Clutter: Scattering, the K Distribution and Radar Performance; Institution of Engineering and Technology: Stevenage, UK, 2013. [Google Scholar]
- Barrick, D.E. The interaction of HF/VHF radio waves with the sea surface and its implications. In Proceedings of the AGARD Conference Proceedings on Electromagnetics of the Sea, Paris, France, 22–25 June 1970; Volume 77, pp. 1–25. [Google Scholar]
- Barrick, D.E. Remote sensing of sea state by radar. In Proceedings of the Ocean 72—IEEE International Conference on Engineering in the Ocean Environment, Newport, RI, USA, 13–15 September 1972; pp. 186–192. [Google Scholar] [CrossRef]
- Leon-Garcia, A. Probability, Statistics, and Random Processes for Electrical Engineering; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Billingsley, B.; Farina, A.; Gini, F.; Greco, M.; Lombardo, P. Impact of experimentally measured Doppler spectrum of ground clutter on MTI and STAP. In Radar Systems (RADAR 97); Institution of Engineering and Technology: Stevenage, UK, 1997. [Google Scholar]
- Rosenberg, L. Characterization of high grazing angle X-band sea-clutter Doppler spectra. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 406–417. [Google Scholar] [CrossRef]
- Levanon, N.; Mozeson, E. Radar Signals; IEEE Press/Wiley-Interscience: Hoboken, NJ, USA, 2004. [Google Scholar]
- Green, P.E, Jr. Radar Astronomy Measurement Techniques; Technical Report 282; MIT Lincoln Laboratory: Lexington, MA, USA, 1962. [Google Scholar]
- Watts, S.; Rosenberg, L. Radar Clutter Modelling and Exploitation. In Proceedings of the 2018 IEEE Radar Conference Tutorial Sessions, Oklahoma City, OK, USA, 23–27 April 2018. [Google Scholar]











© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cooke, C. Analytic Expressions for Radar Sea Clutter WSSUS Scattering Functions. Entropy 2019, 21, 915. https://doi.org/10.3390/e21090915
Cooke C. Analytic Expressions for Radar Sea Clutter WSSUS Scattering Functions. Entropy. 2019; 21(9):915. https://doi.org/10.3390/e21090915
Chicago/Turabian StyleCooke, Corey. 2019. "Analytic Expressions for Radar Sea Clutter WSSUS Scattering Functions" Entropy 21, no. 9: 915. https://doi.org/10.3390/e21090915
APA StyleCooke, C. (2019). Analytic Expressions for Radar Sea Clutter WSSUS Scattering Functions. Entropy, 21(9), 915. https://doi.org/10.3390/e21090915