1. Introduction
The capacity of coherent multiple-input multiple-output (MIMO) channels increases with the signal-to-noise ratio (SNR) as
, where
and
are the number of transmit and receive antennas, respectively, and
denotes the SNR per receive antenna [
1,
2]. The growth factor
is sometimes referred to as the capacity pre-log [
3] or spatial multiplexing gain [
4,
5,
6]. This capacity growth can be achieved using a nearest neighbor decoder which selects the codeword that is closest (in Euclidean distance) to the channel output. In fact, for coherent fading channels with additive Gaussian noise, this decoder is the maximum-likelihood decoder and is therefore optimal in the sense that it minimizes the error probability (see [
7] and references therein). The coherent channel model assumes that there is a genie that provides the exact fading coefficients to the decoder, an assumption that is difficult to achieve in practice. In this paper, we replace the role of the genie by a scheme that estimates the fading coefficients via pilot symbols. This can be viewed as a particular coding strategy over a noncoherent fading channel, i.e., a channel where both communication ends do not have access to fading coefficients but may be aware of the fading statistics. Please note that with imperfect fading estimation, the nearest neighbor decoder that treats the fading estimate as if it were perfect is not necessarily optimal. Nevertheless, we show that in some relevant cases, nearest neighbor decoding with pilot-aided channel estimation achieves the capacity pre-log of noncoherent fading channels. (For noncoherent channels, the
capacity pre-log is defined as the limiting ratio of the capacity to the logarithm of the SNR as the SNR tends to infinity.)
The capacity of noncoherent fading channels has been studied in several works. Building upon [
8], Hassibi and Hochwald [
9] studied the capacity of the block-fading channel and used pilot symbols (also known as training symbols) to obtain reasonably accurate fading estimates. Jindal and Lozano [
10] provided tools for a unified treatment of pilot-based channel estimation in both block and stationary fading channels with bandlimited power spectral densities. In these works, lower bounds on the channel capacity were obtained. Lapidoth [
3] studied a single-input single-output (SISO) fading channel for more general stationary fading processes and showed that depending on the predictability of the fading process, the capacity growth in SNR can be,
inter alia, logarithmic or double logarithmic. The extension of [
3] to multiple-input single-output (MISO) fading channels can be found in [
11]. A lower bound on the capacity of stationary MIMO fading channels was derived by Etkin and Tse in [
12]. With a view to next-generation (5G and beyond) communication networks, there has been an interest in capacity analyses of noncoherent massive MIMO channels with the vast majority of attempts focusing on the block-fading model [
13,
14,
15].
Lapidoth and Shamai [
16] and Weingarten et al. [
17] studied noncoherent stationary fading channels from a mismatched-decoding perspective. In particular, they studied the achievable rates of Gaussian codebooks and nearest neighbor decoding. In both works, it is assumed that there is a genie that provides imperfect estimates of the fading coefficients.
In this work, we add the estimation of the fading coefficients to the analysis. In particular, we study a communication system where the transmitter emits pilot symbols at regular intervals, and where the receiver separately performs channel estimation and data detection. More precisely, based on the channel outputs corresponding to pilot transmissions, the channel estimator produces estimates of the fading coefficients for the remaining time instants using a linear minimum mean-squared error (LMMSE) interpolator. Using these estimates, the data detector employs a nearest neighbor decoder that detects the transmitted message. We study the achievable rates of this communication scheme at high SNR. In particular, we study the pre-log for fading processes with bandlimited power spectral densities. (The pre-log is defined as the limiting ratio of the achievable rate to the logarithm of the SNR as the SNR tends to infinity.)
For SISO fading channels, using simplifying arguments, Lozano [
18] and Jindal and Lozano [
10] showed that this scheme achieves the capacity pre-log. In particular, they express the achievable rates of this scheme in terms of the capacity of a fading channel whose SNR is reduced due to the imperfect channel estimation; (cf. [
10], Equation (
17)). Their expression ([
10], Equation (
21)) for the estimation error is based on the assumption that channel estimation is performed using infinitely many pilot symbols. However, obtaining ([
10], Equation (
17)) from the provided references is not straightforward, since it requires a limiting argument where both the codeword length and the number of pilot symbols tend to infinity in a controlled manner. The analysis is further complicated by the fact that for a given number of pilot symbols, the estimation error of the LMMSE interpolator is not stationary but cyclo-stationary, and it becomes stationary only as the number of pilot symbols tends to infinity. In this paper, we prove this result without any simplifying assumptions and extend it to MIMO fading channels. We show that the maximum rate pre-log with nearest neighbor decoding and pilot-aided channel estimation is given by the capacity pre-log of the coherent fading channel times the fraction of time used for the transmission of data. Hence, the loss with respect to the coherent case is solely due to the transmission of pilots used to obtain accurate fading estimates. If the inverse of twice the bandwidth of the fading process is an integer, then for MISO channels, the above scheme achieves the capacity pre-log derived by Koch and Lapidoth [
11]. For MIMO channels, the above scheme achieves the best so far known lower bound on the capacity pre-log obtained in [
12]. The proof steps followed in this paper apply also to other pilot-assisted communication strategies and can be mimicked to perform rigorous analyses of their achievable rates; see, e.g., [
19,
20,
21,
22].
The rest of the paper is organized as follows.
Section 2 describes the channel model and introduces our transmission scheme along with nearest neighbor decoding and pilots for channel estimation.
Section 3 defines the pre-log and presents the main result.
Section 4 extends the use of our scheme to a fading multiple-access channel (MAC).
Section 5 and
Section 6 provide the proofs of our main results.
Section 7 summarizes the results and concludes the paper.
2. System Model and Transmission Scheme
We consider a discrete-time MIMO flat-fading channel with
transmit antennas and
receive antennas. Thus, the channel output at time instant
(where ℤ denotes the set of integers) is the complex-valued
-dimensional random vector given by
Here
denotes the time-
k channel input vector (with ℂ denoting the set of complex numbers),
denotes the
-dimensional random fading matrix at time
k, and
denotes the
-variate random additive noise vector at time
k.
The noise process
is a sequence of independent and identically distributed (i.i.d.) complex-Gaussian random vectors with zero mean and covariance matrix
, where
is the
identity matrix.
denotes the average SNR for each received antenna. The fading process
is stationary, ergodic, and complex-Gaussian. We assume that the
processes
,
,
are independent and have the same law, with each process having zero mean, unit variance, and power spectral density
,
. The assumption that the fading processes are independent is realistic for data transmission over a rich uniform scattering environment when both transmit and receive antennas have sufficient separation to ensure independent signal paths that translate into spatially-independent fading coefficients. The power spectral density
is a nonnegative (measurable) function satisfying
where
denotes complex conjugation, and where
. We assume that
has bandwidth
, i.e.,
is the smallest value such that
for almost every
. We finally assume that the fading process
and the noise process
are independent and that their joint law does not depend on
.
The transmission involves both codewords and pilots. The former conveys the message to be transmitted, and the latter are used to facilitate the estimation of the fading coefficients at the receiver. We denote a codeword conveying a message
m,
at rate
R (where
is the set of possible messages, and where
denotes the largest integer smaller than or equal to
b) by the length-
n sequence of input vectors
. The codeword is selected from the codebook
, which is drawn i.i.d. from an
-variate complex-Gaussian distribution with zero mean and identity covariance matrix, so
where
denotes the Euclidean norm.
To estimate the fading matrix, we transmit orthogonal pilot vectors. The pilot vector used to estimate the fading coefficients corresponding to the t-th transmit antenna is given by and for . For example, the first pilot vector is , where denotes the transpose. To estimate the whole fading matrix, we thus need to send the pilot vectors .
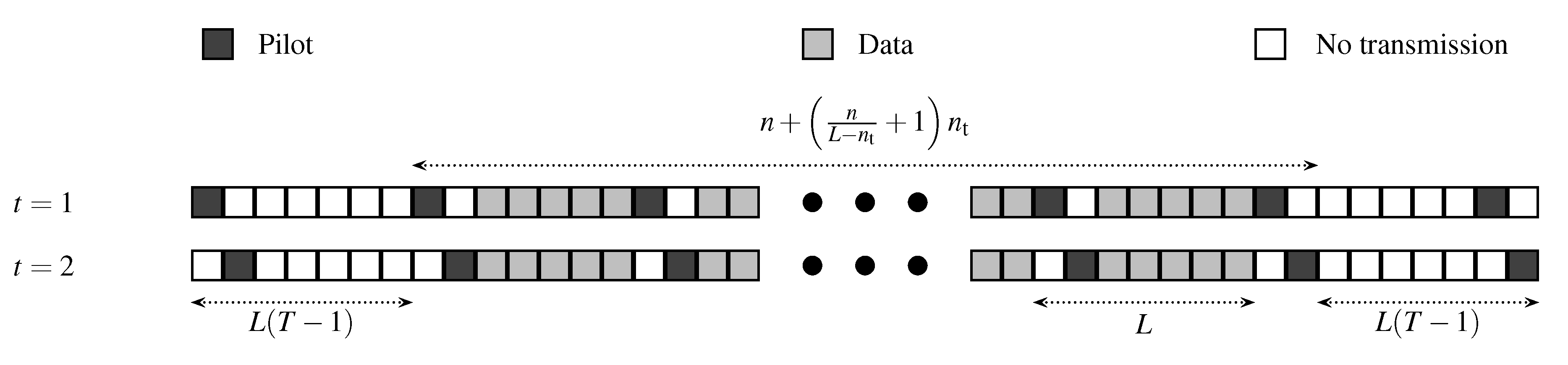
The transmission scheme is as follows. Every
L time instants (for some
, where ℕ is the set of positive integers), we transmit the
pilot vectors
. Each codeword is then split up into blocks of
data vectors, which will be transmitted after the
pilot vectors. The process of transmitting
data vectors and
pilot vectors continues until all
n data vectors are completed. Herein we assume that
n is an integer multiple of
. (If
n is not an integer multiple of
, then the last
instants are not fully used by data vectors and include therefore time instants where we do not transmit anything. The thereby incurred loss in information rate vanishes as
n tends to infinity.) Prior to transmitting the first data block, and after transmitting the last data block, we introduce a guard period of
time instants (for some
), where we transmit every
L time instants the
pilot vectors
, but we do not transmit data vectors in between. The guard period ensures that at every time instant, we can employ a channel estimator that bases its estimation on the channel outputs corresponding to the
T preceding and the
T subsequent pilot transmissions. This facilitates the analysis and, asymptotically, does not incur any loss in terms of achievable rates. The above transmission scheme is illustrated in
Figure 1. The channel estimator is described in the following.
Please note that the total blocklength of the above transmission scheme (comprising data vectors, pilot vectors, and guard period) is given by
where
denotes the number of channel uses reserved for pilot vectors, and where
denotes the number of channel uses during the silent guard period, i.e.,
We now turn to the decoder. Let
denote the set of integers reserved for the transmission of data vectors, and let
denote the set of integers reserved for the transmission of pilot symbols. The decoder consists of two parts: a
channel estimator and a
data detector. To estimate the fading coefficient at a given time instant, the channel estimator considers the channel output vectors
,
corresponding to the
T preceding and
T subsequent pilot transmissions and estimates
using a linear interpolator. The estimate
of the fading coefficient
is thus given by
where the coefficients
are chosen in order to minimize the mean-squared error. (It has been shown in [
23] that for the linear interpolator in (
7), only the observations when pilots are transmitted, i.e.,
are relevant for fading estimation.) In general, these coefficients depend on
k and
T. However, for the sake of compactness, we do not reflect this dependence in the notation.
Please note that since the pilot vectors transmit only from one antenna, the fading coefficients corresponding to all transmit and receive antennas can be observed. Furthermore, please note that since the fading processes , , are independent, estimating only based on rather than on incurs no loss in optimality.
Since the time-lags between
,
and the observations
,
depend on
k, it follows that the interpolation error
is not stationary but cyclo-stationary with period
L. It can be shown that, irrespective of
r, the variance of the interpolation error
tends to the following expression as
T tends to infinity [
23]:
where
denotes the remainder of
. Here
is given by
and
is the periodic continuation of
, i.e., it is the periodic function of period
that coincides with
for
. If
then
becomes
In this case, irrespective of
ℓ and
t, the variance of the interpolation error is given by
which vanishes as the
tends to infinity. Recall that
denotes the bandwidth of
. Thus, (
13) implies that no aliasing occurs as we undersample the fading process
L times. Please note that in contrast to (11), the variance in (
15) is independent of the transmit antenna index
t. See
Section 5.1 for a more detailed discussion.
The channel estimator feeds the sequence of fading estimates
(which is composed of the matrix entries
) to the data detector. We shall denote its realization by
. Based on the channel outputs
and fading estimates
, the data detector uses a nearest neighbor decoder to guess which message was transmitted. Thus, the decoder decides on the message
that satisfies
where
On the RHS of (
17), assuming that the first pilot symbol is transmitted at time
, we defined
as the set of time indices where data vectors corresponding to a codeword of length
are transmitted. (For comparison,
represents the set of
all integers that are reserved for the transmission of data vectors).
3. The Pre-Log
We say that a rate
is achievable if there exists a code of length
n with
codewords such that the error probability tends to zero as
n tends to infinity. In this work, we study the set of rates that are achievable with nearest neighbor decoding and pilot-aided channel estimation. We focus on the achievable rates at high
. In particular, we are interested in the maximum achievable pre-log, defined as
where
is the maximum rate achievable with nearest neighbor decoding and pilot-aided channel estimation, maximized over all possible encoders.
The capacity pre-log—which is given by (
20) but with
replaced by the capacity
—of SISO fading channels was computed by Lapidoth [
3] as
where
denotes the Lebesgue measure on the interval
. (The capacity is defined as the supremum of all achievable rates maximized over all possible encoders and decoders.) Koch and Lapidoth [
11] extended this result to MISO fading channels and showed that if the fading processes
,
are independent and have the same law, then the capacity pre-log of MISO fading channels is equal to the capacity pre-log of the SISO fading channel with fading process
. Using (
21), the capacity pre-log of MISO fading channels with bandlimited power spectral densities of bandwidth
can be evaluated as
Since
, it follows that
.
To the best of our knowledge, the capacity pre-log of MIMO fading channels is unknown. For independent fading processes
,
,
that have the same law, the best so far known lower bound on the MIMO pre-log is due to Etkin and Tse [
12], and is given by
For power spectral densities that are bandlimited to
, this becomes
Observe that (
24) specializes to (
22) for
.
It should be noted that the capacity pre-log for MISO and SISO fading channels was derived under a peak-power constraint on the channel inputs, whereas the lower bound on the capacity pre-log for MIMO fading channels was derived under an average-power constraint. Clearly, the capacity pre-log corresponding to a peak-power constraint can never be larger than the capacity pre-log corresponding to an average-power constraint. It is believed that the two pre-logs are in fact identical (see the conclusions in [
3]).
In this paper, we show that a communication scheme that employs nearest neighbor decoding and pilot-aided channel estimation achieves the following pre-log.
Theorem 1. Consider the Gaussian MIMO flat-fading channel with transmit antennas and receive antennas (1). Then, the transmission and decoding scheme described in Section 2 achieveswhere . Remark 1. We derive Theorem 1 for i.i.d. Gaussian codebooks, which satisfy the average-power constraint (3). Nevertheless, it can be shown that Theorem 1 continues to hold when the channel inputs satisfy a peak-power constraint. More specifically, we show in Section 5.3 that for an input distribution with power constraint to achieve the pre-log (25), it is sufficient that its probability density function satisfiesfor some K satisfyingThe condition (26) is satisfied, for example, by i.i.d., truncated, Gaussian inputs, i.e., by inputs for which the elements in are i.i.d. andwith If
is an integer, then (
25) becomes
Thus, in this case nearest neighbor decoding together with pilot-aided channel estimation achieves the capacity pre-log of MISO fading channels (
22) as well as the lower bound on the capacity pre-log of MIMO fading channels (
24).
Suppose that both transmitter and receiver use the same number of antennas, namely,
. Then, as the codeword length tends to infinity, we have from (
4)–(6) that the fraction of time consumed for the transmission of pilots is given by
Consequently, by rewriting the pre-log (
25) as
we observe that the loss compared to the capacity pre-log
of the coherent fading channel is given by the fraction of time used for the transmission of pilots. This implies that the nearest neighbor decoder in combination with the channel estimator described in
Section 2 is optimal at high SNR in the sense that it achieves the capacity pre-log of the coherent fading channel. Moreover, the achievable pre-log in Theorem 1 is the best pre-log that can be achieved by any scheme employing
pilot vectors.
To achieve the pre-log in Theorem 1, we assume that the training period
L satisfies
, in which case the variance of the interpolation error (
15), namely
vanishes as the reciprocal of the SNR. The achievable pre-log is then maximized by maximizing
. Please note that as a criterion of “perfect side information” for nearest neighbor decoding in fading channels, Lapidoth and Shamai [
16] suggested that the variance of the fading estimation error should be negligible compared to the reciprocal of the SNR. The condition
can thus be viewed as a sufficient condition for obtaining “nearly perfect side information” in the sense that the variance of the interpolation error is of the same order as the reciprocal of the SNR.
Of course, one could increase the training period
L beyond
. By increasing
L, we reduce the rate loss due to the transmission of pilots as indicated in (
32) at the cost of obtaining a larger fading estimation error, which in turn may reduce the reliability of the nearest neighbor decoder. To understand this trade-off better, we next briefly discuss the achievable pre-log when
. Indeed, for
, the variance of the interpolation error follows from (11) as
The former integral
vanishes as the reciprocal of the SNR. However, we prove in
Appendix B that, as the SNR tends to infinity, the latter integral
is bounded away from zero. This implies that the interpolation error (35) does not vanish as the SNR tends to infinity, and the pre-log achievable with the scheme described in
Section 2 is zero. It thus follows that the condition
is necessary in order to achieve a positive pre-log.
Comparing (
24) and (
25) with the capacity pre-log
of the coherent fading channel, we observe that, for a fading process of bandwidth
, the penalty for not knowing the fading coefficients is roughly
. Consequently, the lower bound (
25) does not grow linearly with
, but it is a quadratic function of
that achieves its maximum at
This gives rise to the lower bound
which cannot be larger than
. The same holds for the lower bound (
23).
4. Fading Multiple-Access Channels
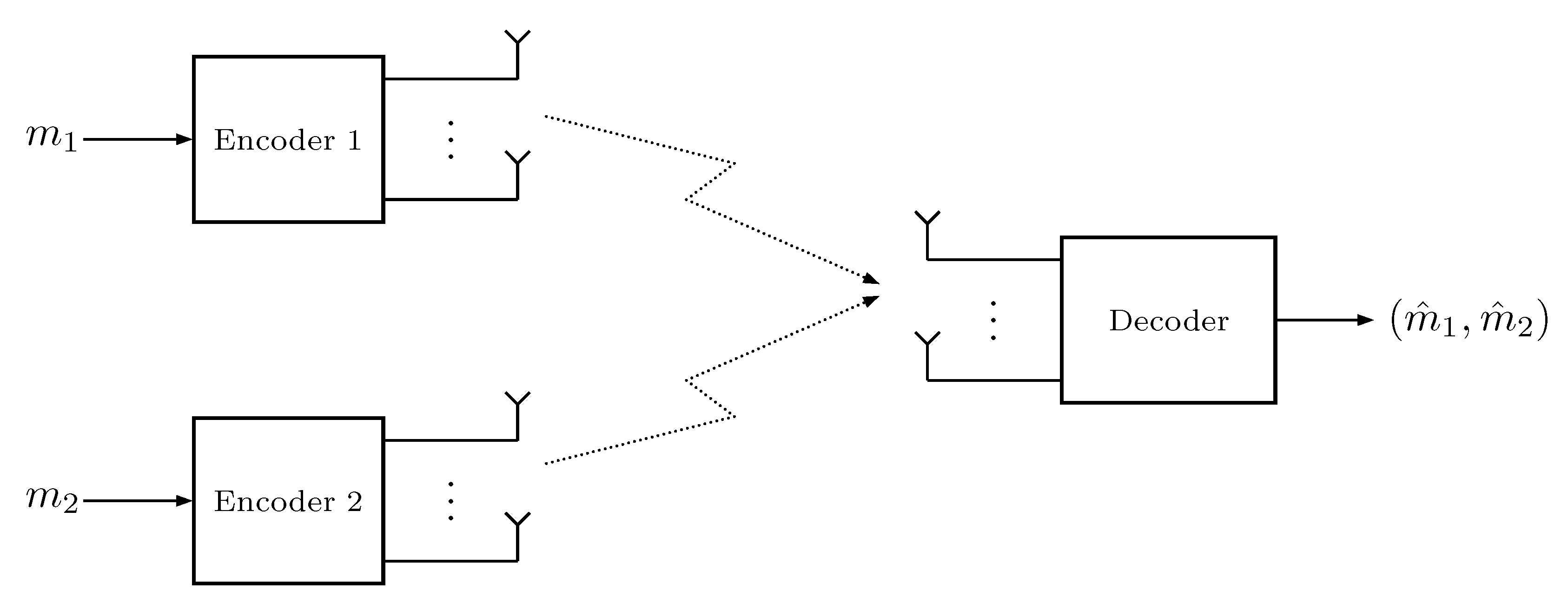
In this section, we extend the use of nearest neighbor decoding with pilot-aided channel estimation to the fading MAC depicted in
Figure 2. We are interested in the pre-log region that can be achieved with this scheme.
We consider a two-user MIMO fading MAC, where two terminals wish to communicate with a third one, and where the channels between the terminals are MIMO fading channels. Extension to more than two users is straightforward. The first user has
antennas, the second user has
antennas, and the receiver has
antennas. The channel output at time instant
is a complex-valued
-dimensional random vector given by
Here
denotes the time-
k channel input vector corresponding to user
s,
;
denotes the
-dimensional fading matrix at time
k corresponding to user
s,
;
denotes the average SNR for each transmit antenna; and
denotes the
-variate additive noise vector at time
k. The fading processes
,
are independent of each other and of the noise process
and have the same distribution as the fading process considered in the point-to-point channel (
Section 2). The noise process
is a sequence of i.i.d. complex-Gaussian vectors with zero mean and covariance matrix
.
Both users transmit codewords and pilot symbols over the channel (
40). To transmit the messages
,
(where
and
are drawn independently), each user’s encoder selects a codeword of length
n from a codebook
, where
,
are drawn i.i.d. from an
-variate, zero-mean, complex-Gaussian distribution of covariance matrix
. Similar to the single-user case, orthogonal pilot vectors are used. The pilot vector
,
,
used to estimate the fading coefficients from transmit antenna
t of user
s is given by
and
for
. For example, the first pilot vector of user
s is given by
. To estimate the fading matrices
and
, each training period requires the transmission of
pilot vectors
.
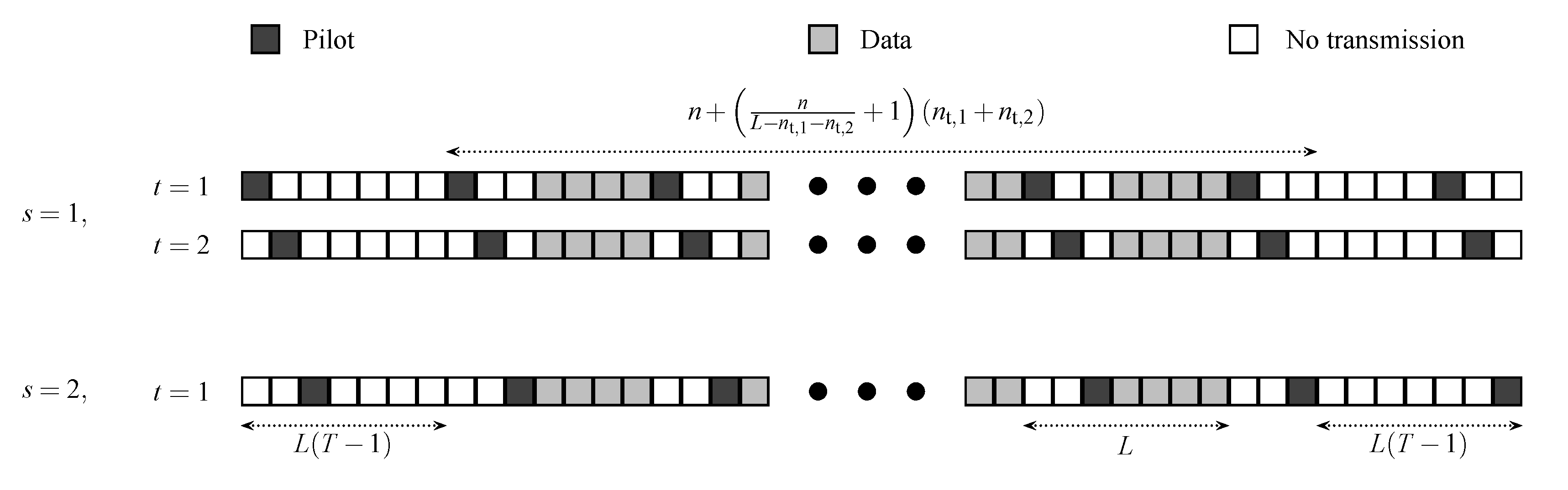
Assuming that transmission from both users is synchronized, the transmission scheme extends the point-to-point setup in
Section 2 to the two-user MAC setup as illustrated in
Figure 3. Every
L time instants (for some
), user 1 first transmits the
pilot vectors
. Once the transmission of the
pilot vectors ends, user 2 transmits its
pilot vectors
. The codewords for both users are then split up into blocks of
data vectors, which are transmitted simultaneously after the
pilot vectors. The process of transmitting
data vectors and
pilot vectors continues until all
n data symbols are completed. Herein we assume that
n is an integer multiple of
. (As in the point-to-point setup, in the limit as
n tends to infinity, this assumption is not critical in terms of achievable rates.) Prior to transmitting the first data block, and after transmitting the last data block, a guard period of
time instants (for some
) is introduced for the purpose of channel estimation, where we transmit every
L time instants the
pilot vectors but we do not transmit data vectors in between. Please note that codewords from both users are
jointly transmitted at the same time instants whereas pilots from both users do not interfere and are
separately transmitted at different time instants. The total blocklength of this transmission scheme (comprising data vectors, pilot vectors, and guard period) is given by
where
and
are
Similar to the single-user case, the receiver guesses which messages have been transmitted using a two-part decoder that consists of a channel estimator and a data detector. The channel estimator first obtains matrix-valued fading estimates
,
from the received pilots
,
using the same linear interpolator as (
7). From the received codeword
and the channel-estimate matrices
,
(which are the realizations of
,
), the decoder chooses the pair of messages
that minimizes the distance metric
where
and where
is defined in the same way as (
18). In the following, we shall refer to the above communication scheme as the
joint-transmission scheme.
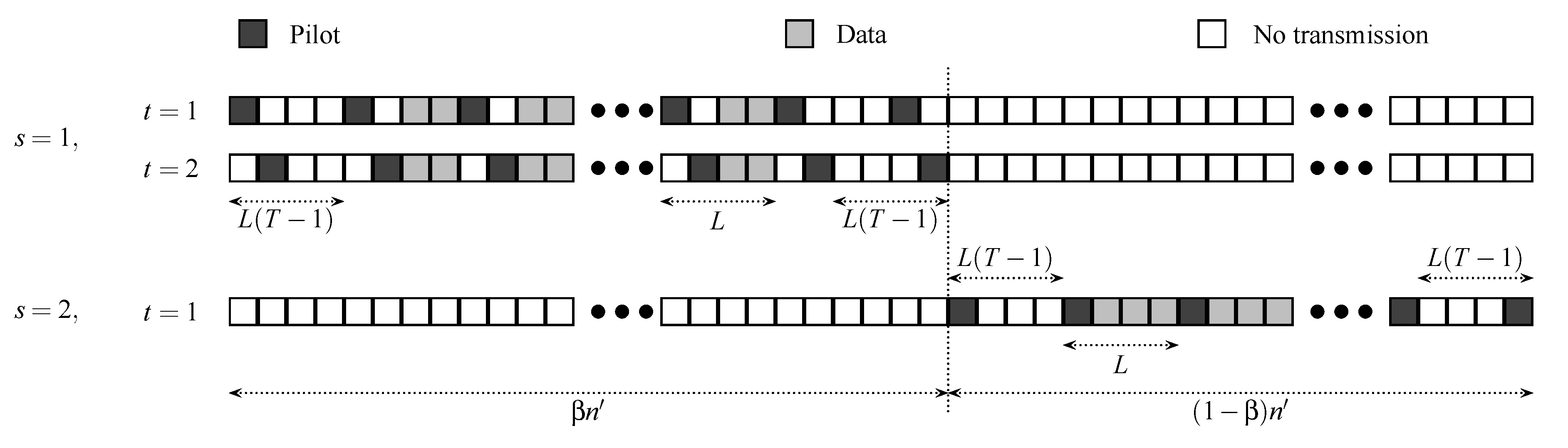
We shall compare the joint-transmission scheme with a time-division multiple-access (TDMA) scheme, where each user transmits its message using the transmission scheme illustrated in
Figure 4. Specifically, during the first
channel uses (for some
, and where
is given in (
41)), user 1 transmits its codeword according to the transmission scheme given in
Section 2 (see also
Figure 4), while user 2 is silent. Then, during the next
channel uses, user 2 transmits its codeword according to the same transmission scheme, while user 1 is silent. In both cases, the receiver guesses the corresponding message
,
using a nearest neighbor decoder and pilot-aided channel estimation.
4.1. The MAC Pre-Log
Let
,
, and
be the maximum achievable rate of user 1, the maximum achievable rate of user 2, and the maximum achievable sum-rate, respectively. The achievable-rate region is given by the set [
24]
We are interested in the pre-logs of all rate pairs
in
, defined as the limiting ratios of
and
to the logarithm of the SNR as the SNR tends to infinity. More precisely, the pre-log region is defined as the set of all pre-log pairs
for which there exists a sequence of rate pairs
that, for every
, lies in
and satisfies
Let the maximum achievable pre-logs be defined as
and define the capacity pre-logs
,
, and
in the same way but with
,
, and
replaced by the respective capacities
,
, and
. If the ratios of the rates to
in (
47)–(51) converge as
, i.e., if the limits superior are, in fact, limits, then the pre-log region is given by the set
Indeed,
includes all rate pairs
satisfying
This implies that, for every pre-log pair
in
, we can find a sequence of rate pairs
in
that achieve (
47)–(48). Conversely, if the pre-log pair
does not lie in
, then there exists a sufficiently large
such that, for all
, at least one of the three conditions (
53)–(55) is violated. Consequently, we cannot find a sequence of rate pairs
in
that satisfies (
47)–(48).
We next present our result on the pre-log region of the two-user MIMO fading MAC achievable with the joint-transmission scheme.
Theorem 2. Consider the MIMO fading MAC (40). Then, the joint-transmission scheme achieves the pre-log regionwhere . The pre-log region given in Theorem 2 is the largest region achievable with any transmission scheme that uses
of the time instants for transmitting pilot symbols. Indeed, even if the channel estimator would be able to estimate the fading coefficients perfectly, and even if we could decode the data symbols using a maximum-likelihood decoder, the capacity pre-log region (without pilot transmission) would be given by the set [
1,
2,
24]
which, after multiplying by
to account for the transmission of pilot symbols, becomes (
56). Thus, in order to improve upon (
56), one would need to design a transmission scheme that employs less than
pilot symbols per channel use.
Remark 2 (TDMA Pre-Log).
Consider the MIMO fading MAC (40). Then, the TDMA scheme employing nearest neighbor decoding and pilot-aided channel estimation achieves the pre-log regionwhere . This follows directly from the pre-log of the point-to-point MIMO fading channel (Theorem 1) with the number of transmit antennas given by and , respectively. Please note that the sum of the pre-logs
is upper-bounded by the capacity pre-log of the point-to-point MIMO fading channel with
transmit antennas and
receive antennas, since the latter channel corresponds to the case where the transmitting terminals can cooperate. While the capacity pre-log of general point-to-point MIMO fading channels remains an open problem, the capacity pre-log of point-to-point MISO fading channels is known, cf. (
22). It thus follows that, for
, we have
which together with the single-user constraints
implies that TDMA achieves the capacity pre-log region of the SISO fading MAC. The next section provides a more detailed comparison between the joint-transmission scheme and TDMA.
4.2. Joint Transmission Versus TDMA
In this section, we discuss how the joint-transmission scheme performs compared to TDMA. To this end, we compare the sum-rate pre-log
of the joint-transmission scheme (Theorem 2) with the sum-rate pre-log of the TDMA scheme employing nearest neighbor decoding and pilot-aided channel estimation (Remark 2) as well as with the sum-rate pre-log of the coherent TDMA scheme, where the receiver has knowledge of the realizations of the fading processes
,
. In the latter case, the sum-rate pre-log is given by
The following corollary presents a sufficient condition on
under which the sum-rate pre-log of the joint-transmission scheme is strictly larger than that of the coherent TDMA scheme (
62), as well as a sufficient condition on
under which the sum-rate pre-log of the joint-transmission scheme is strictly smaller than the sum-rate pre-log of the TDMA scheme given in Remark 2. Since (
62) is an upper bound on the sum-rate pre-log of any TDMA scheme over the MIMO fading MAC (
40), and since the sum-rate pre-log given in Remark 2 is a lower bound on the sum-rate pre-log of the best TDMA scheme, it follows that the sufficient conditions presented in Corollary 1 hold also for the best TDMA scheme.
Corollary 1. Consider the MIMO fading MAC (40). The joint-transmission scheme achieves a larger sum-rate pre-log than any TDMA scheme ifwhere we define for every . Conversely, the best TDMA scheme achieves a larger sum-rate pre-log than the joint-transmission scheme if Recall that is inversely proportional to the bandwidth of the power spectral density , which in turn is inversely proportional to the coherence time of the fading channel. Corollary 1 thus demonstrates that the joint-transmission scheme tends to be superior to TDMA when the coherence time of the channel is large. In contrast, TDMA is superior to the joint-transmission scheme when the coherence time of the channel is small. Intuitively, this can be explained by observing that, compared to TDMA, the joint-transmission scheme uses the antennas at the transmitters and at the receiver more efficiently, but requires more pilot symbols to estimate the fading coefficients. Thus, when the coherence time is large, the number of pilot symbols required to estimate the fading is small, so the gain in achievable rate by using the antennas more efficiently dominates the loss incurred by requiring more pilot symbols. On the other hand, when the coherence time is small, the number of pilot symbols required to estimate the fading coefficients is large and the loss in achievable rate incurred by requiring more pilot symbols dominates the gain by using the antennas more efficiently.
We next evaluate (
63) and (
64) for some particular values of
,
, and
.
4.2.1. Receiver Employs Less Antennas than Transmitters
Suppose that
. Then, the right-hand sides (RHSs) of (
63) and (
64) become
∞, so every finite
satisfies (
64). Thus, if the number of receive antennas is smaller than the number of transmit antennas, then, irrespective of
, TDMA is superior to the joint-transmission scheme.
4.2.2. Receiver Employs More Antennas than Transmitters
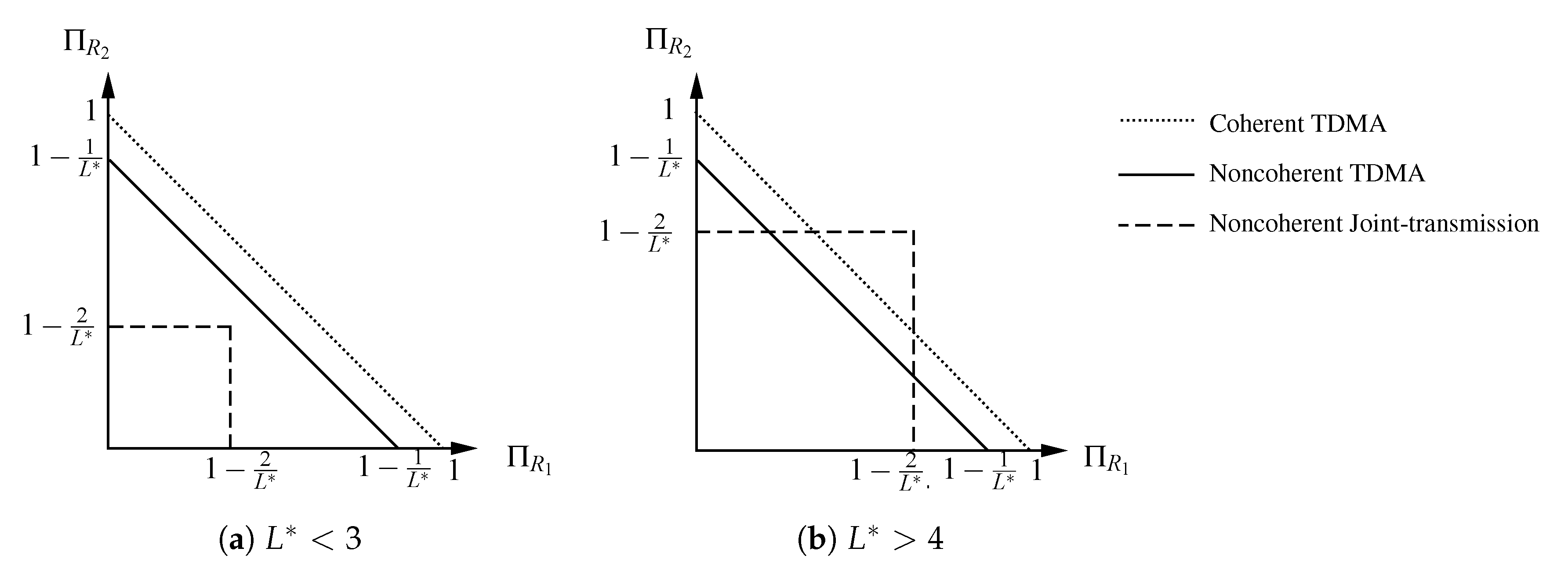
Suppose that
, and suppose that
. Then, (
63) and (
64) become
and
Thus, if
is greater than
, then the joint-transmission scheme is superior to TDMA. In contrast, if
is smaller than
, then TDMA is superior. This is illustrated in
Figure 5 for the case where
and
. Please note that if
is between
and
, then the joint-transmission scheme is superior to the TDMA scheme presented in Remark 2, but it may be inferior to the best TDMA scheme.
4.2.3. A Case in between
Suppose that
and
. Then, (
63) and (
64) become
and
Thus, in this case the joint-transmission scheme is always inferior to the coherent TDMA scheme (
62), but it can be superior to the TDMA scheme in Remark 2.
4.3. Typical Values of
We briefly discuss the range of values of
that may occur in practical scenarios. To this end, we first recall that
, and that
is the bandwidth of the fading power spectral density
, which can be associated with the Doppler spread of the channel as [
12]
Here
is the maximum Doppler shift given by
where
v is the speed of the mobile device,
m/s is the speed of light, and
is the carrier frequency; and
is the coherence bandwidth of the channel approximated as [
12,
25]
where
is the delay spread. Following the order-of-magnitude computations of Etkin and Tse [
12], we determine typical values of
for indoor, urban, and hilly area environments and for carrier frequencies ranging from 800 MHz to 5 GHz and tabulate the results in
Table 1.
For indoor environments and mobile speeds of 5 km/h, we have that
is typically larger than
. For urban environments,
is typically larger than
for mobile speeds of 5 km/h and larger than 125 for mobile speeds of 75 km/h. For hilly area environments and mobile speeds of 200 km/h,
ranges typically from 10 to 250. Thus, for most practical scenarios,
is typically large. It therefore follows that, if
, the condition (
63) is satisfied unless
is very large. For example, if the receiver employs more antennas than the transmitters, and if
, then
is satisfied even for urban environments and mobile speeds of 75 km/h, as long as
. Only for hilly area environments and mobile speeds of 200 km/h, this condition may not be satisfied for a practical number of transmit antennas. Thus, if the number of antennas at the receiver is sufficiently large, then the joint-transmission scheme is superior to TDMA in most practical scenarios. On the other hand, if
, then TDMA is always superior to the joint-transmission scheme, irrespective of how large
is. This suggests that one should use more antennas at the receiver than at the transmitters.
6. Proof of Theorem 2
In contrast to the proof of Theorem 1, for the fading MAC, it is not sufficient to restrict ourselves to the case of . For example, increasing beyond and does not increase the single-rate pre-logs and , but it does increase the pre-log of the achievable sum-rate . For the proof of Theorem 2, we therefore consider a general setup of , , and .
We derive the achievable pre-logs for the MAC case by following similar steps as in the point-to-point case. We first consider the average error probability, averaged over the ensemble of i.i.d. Gaussian codebooks. Let
and
be the ensemble-average error probability and the ensemble-average error probability when messages
and
are transmitted, respectively. Due to the symmetry of the codebook construction,
is equal to
and it therefore suffices to consider
to derive the achievable rates. Let
denote the event that
, where
was defined in (
45). Using the union bound, the error probability
can be upper-bounded as
We next analyze the three probabilities on the RHS of (139). Let the matrix
,
with entries
be the estimation-error matrix in estimating
, i.e.,
To facilitate the analysis, we first generalize
and
, defined in the point-to-point case in (
77) and (
78), to the MAC case:
for some
, with
given in (
41) and
. Using
and the typical set
, we continue by evaluating the GMI for each of the three probabilities on the RHS of (139), which correspond to the error events
,
, and
.
6.1. Error Event
Following the steps in
Section 5.2 to derive (
86), we can upper-bound the ensemble-average error probability for the error event
,
as
Note that the second probability on the RHS of (143) vanishes as
n tends to infinity, which can be shown along the lines of the proof of Lemma 2.
The GMI of user 1 gives the rate of exponential decay of the term
as
. Its evaluation requires the expression of the log moment-generating function of the metric
, conditioned on the channel outputs, on
, and on the fading estimates, which is defined as
where
Following the steps used in
Section 5.2 to obtain (90) and (91), it can be shown that
Then, following the steps used in
Section 5.2 to derive (92)–(94), we obtain that, for all
,
where the last step should be regarded as the definition of
. In (
148), we define
Following the derivation in [
16,
17], we can then upper-bound
for any
, and for some
satisfying
On the RHS of (
151),
denotes the GMI for user 1 as a function of the
for a fixed
T, i.e.,
The pre-factor
equals the fraction of time used for data transmission. The bound (
151) implies that, for all rates below
, the error probability in decoding user 1’s message for the scheme described in
Section 4 vanishes as
n tends to infinity.
Combining (
141) and (
148) with (
153), we obtain that
Since the supremum over
is difficult to evaluate, we next consider a lower bound on
. By noting that
for
(which can be shown using the technique developed in ([
29], Appendix D), and by choosing
where
we obtain the following lower bound on
:
(As pointed out in
Section 5, this choice of
yields a good lower bound at high SNR.) We continue by analyzing the RHS of (
157) in the limit as the observation window
T of the channel estimator tends to infinity. To this end, we note that, for
, the variance of the interpolation error tends to (
15) (with
in (
15) replaced by
due to the difference between the point-to-point channel model (
1) and the MAC channel model (
40)), so
irrespective of
, and
t. It follows that the estimate
tends to
in distribution as
T tends to infinity, which implies that
where the
entries of
are i.i.d., circularly-symmetric, complex-Gaussian random variables with zero mean and variance
. Using Portmanteau’s lemma (as used in (109)), we obtain that
where
The inequality (162) follows by lower-bounding
.
By evaluating the limiting ratio of the RHS of (162) to
as
tends to infinity following similar steps as in
Section 5.2.3, we obtain the following lower bound on the maximum achievable pre-log of user 1:
As in the point-to-point case, the condition
is necessary to obtain (
15). The lower bound (
164) yields one boundary of the pre-log region presented in Theorem 2.
6.2. Error Event
The error event
can be analyzed by swapping user 1 and user 2 and then using the results obtained in the previous subsection for the error event
. We thus have the lower bound
which yields the second boundary of the pre-log region presented in Theorem 2.
6.3. Error Event
For the error event
, the analysis of the achievable sum rate follows the same analysis as in the point-to-point case (
Section 5.2). More specifically, the GMI
that describes the exponential decay of the term
can be viewed as the GMI of an
-dimensional point-to-point MIMO channel with fading matrix
and fading estimate matrix
. The maximum achievable sum-rate pre-log can therefore be obtained by following the same steps as in
Section 5.2, but with arbitrary
and
. It can thus be shown that the maximum achievable sum-rate pre-log
is lower-bounded by
On the RHS of (
167), the term
corresponds to the MIMO gain, which is given by the minimum number of receive and transmit antennas, and the term
corresponds to the fraction of time indices for data transmission. This yields the third boundary of the pre-log region presented in Theorem 2.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}