1. Introduction
Smart City is a general term used to represent an information system installed in certain intelligent environments to disseminate information regarding the operation of the city and the quality of life of the residents [
1], such as information about the water supply, traffic conditions, dangerous leaks, cultural and sports events, health-related information, updates about pollution, and climate-related data among many others. In pandemic times, smart city environments would allow having detailed monitoring of contagion hotspots by following close encounters of potential sick individuals with other people in specific periods and locations. With this information, governmental authorities can isolate specific individuals who might be at risk of infection without affecting the rest of the population, effectively avoiding the complete lockdown of the city and reducing the economic impact of the epidemic.
The outbreak of a new virus that emerged in the city of Wuhan, central China in December 2019, has crossed all borders. The virus was named Severe Acute Respiratory Syndrome Coronavirus 2 (SARS-CoV-2 for short) by the International Committee on Taxonomy of Viruses. Consequently, COVID-19 (Coronavirus Disease 2019) is the illness that it causes [
2]. On 8 February 2021, the Worldometer COVID-19 Data reported 106,952,085 cases with COVID-19 and confirmed 2,334,563 deaths worldwide [
3].
It is generally known that SARS-CoV-2 is primarily transmitted via airborne, through aerosols emitted during speech, sneeze or cough, by infected individuals [
4]. Aerosols containing SARS-CoV-2 remain suspended in the air for hours [
5], and may potentially be inhaled by others. Therefore, for reducing the risk of transmission, physical distancing of 2 m is considered as an effective protection only if everyone wears face masks in daily life activities [
6]. However, small particles with viral content may travel in indoor environments, covering distances up to 10 m starting from the emission sources [
6]. Moreover, the temperature, lighting, and humidity of the environment are abiotic factors that influence the inactivation of COVID-19.
It is reported that exposure of the SARS-CoV-2 virus for 30 min at 34
C, in the absence of humidity, is sufficient to damage the structure of the spike protein [
7], which binds to ACE2 (Angiotensin-converting enzyme 2) the receptor for SARS-CoV-2 [
8]. In contrast, at 22
C, the spike protein structure remains unaffected. Regarding exposure of the virus to sunlight, about 90% or more of SARS-CoV-2 virus is inactivated after being exposed for 11--34 min of midday sunlight in Mexico and in many other world cities during summer. On the contrary, the virus is active for a day or more in winter [
9].
UV light is divided into three classifications: UVA (320–400 nm), UVB (280–320 nm), and UVC (200–280 nm). UVC is absorbed by RNA and DNA bases [
10], which is effective for inactivating SARS-CoV-2 [
11]. The monitoring of the above-mentioned abiotic factors can help us to determine the pedestrian occupancy in a building or space, and implement precautionary measures to reduce risks of getting COVID-19.
In current times, the COVID-19 epidemic has shown the devastating effects of poor infection monitoring and tight and generalized quarantine conditions in different cities regarding the economy and general health of their population, due to prolonged isolation, lack of social interaction, and sunlight, among others. Furthermore, experts warn that this current epidemic is only one of many others to come in the near future. Hence, we suggest being ready for future emergencies by having the computational tools to avoid catastrophic scenarios as the one lived worldwide in 2020–2021. To this end, contact tracing is a critical tool to stop the spreading of such diseases [
12,
13,
14].
Our monitoring system employs devices with Radio Frequency (RF) communication capabilities to periodically send a beacon signal to form mobile clusters (pedestrians are usually moving in specific trajectories and the clusters move accordingly) with individuals inside their radio of interest, i.e., within the distance of possible contagion. This radio can be modified according to the abiotic factors monitored at certain times during the day. Even if worldwide safety guidelines clearly state to keep social distancing of at least two meters, in many cases, these recommendations have not been respected as has been documented throughout the world [
15,
16]. This is the main reason for the increment in confirmed cases at different periods of this pandemic. In some cases, the 2-m social distance has not been respected due to cultural, religious, social, and/or commercial reasons where people continue to gather in special dates that they are used to celebrate, despite police installing sanitary filters and trying to separate people by force, as reported in [
15]. Furthermore, as mentioned in [
17], urban agglomerations, where the social distancing is not fully respected, are the centers at highest risk during a period of a pandemic. Indeed, more than 90% of COVID-19 clusters are associated with densely populated urban agglomerations and megacities in the world [
17]. This is can be explained in part by the fact that people have not respected the 2-m distancing on their daily activities since cities are the economic and financial motor of many developing countries and many activities cannot be completely stopped, workers have to travel, in many cases using the public transport system where close contacts cannot be avoided as noted in [
18]. Building on this, we believe that using a short-range (lower than 2 m) clustering scheme for communication among pedestrian’s devices for contact tracing applications entail important benefits.
Although ad-hoc wireless sensor networks could be designed based on Bluetooth technology (see, e.g., [
19]), we find some issues that limit its application to the tracking of pedestrians in a pandemic scope. In the first place, its high power consumption: establishing a wireless Bluetooth link at a distance of 10 m (Power Class 2) or 1 m (Power Class 3) requires 4 dBm or 0 dBm, respectively. In this work, we designed a wireless device that employs only –17.5 dBm for establishing a reliable wireless link, which is far lower than the previous transmitting powers. In the second place, the pairing of devices: for the correct pairing, the Bluetooth devices should be close enough depending on their transmission power and the level of security. It is observed that the higher the level of security, the larger the average time needed to establish a link (see, e.g., [
20]). This may require a few seconds, which is far larger than the microseconds used to transmit data between our RF devices. In the third place, security: though Bluetooth employs an authentication protocol to connect two devices, as well as encryption for transmitting data, it is not difficult to attack a Bluetooth device (see, e.g., [
21]), which compromises the protection of information of the pedestrians.
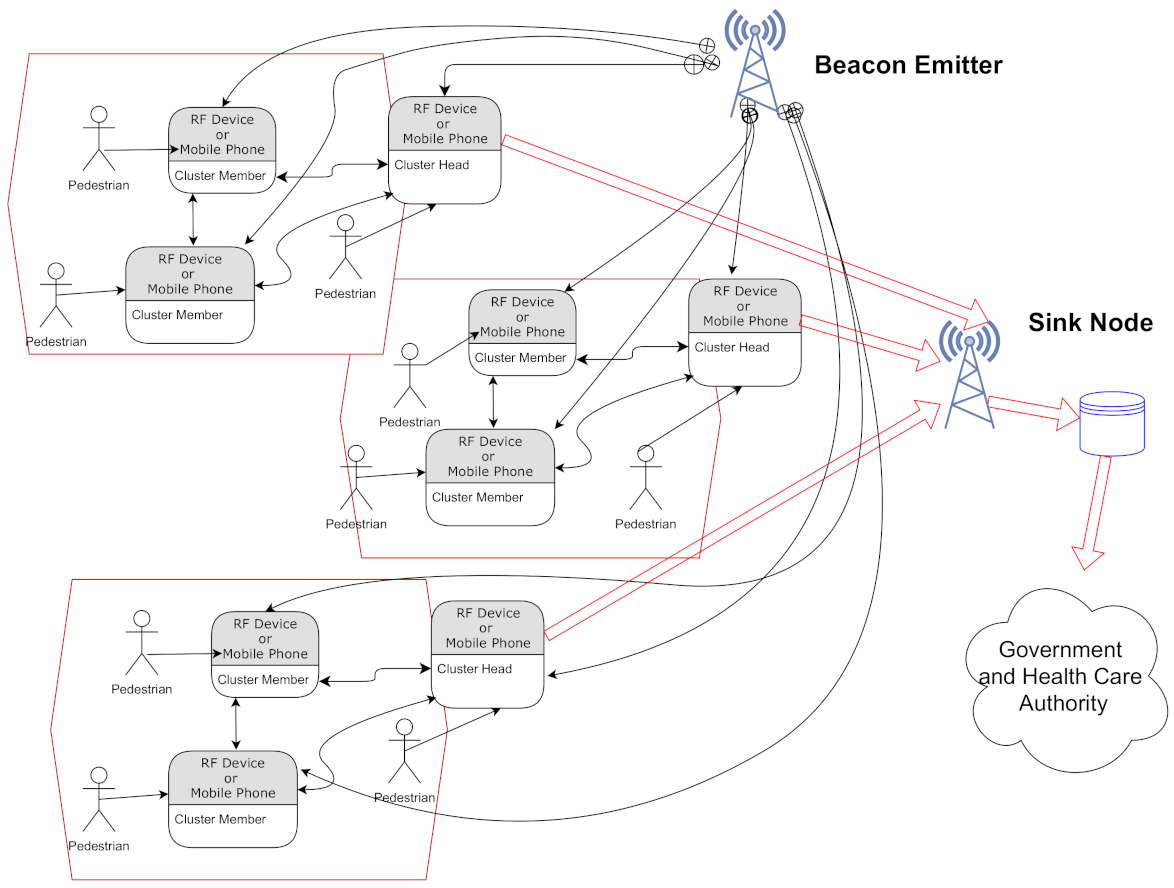
Then, our proposal focuses on nodes inside the mobile cluster to share their ID in order to detect the people that was in close interaction with each individual throughout the day. Hence, whenever an individual is confirmed to be infected (by a trusting health authority), the city services can easily detect the people that could be in potential infection danger by determining the identity of the people that were close to this infected person in the previous days. Thus, these people in potential danger can be isolated as well as the people that were in touch with them and so on and so forth.
The use of mobile clusters aims at making efficient utilization of resources, increasing the success transmission probability of nodes. For mobile applications, Cluster Heads (CHs) can transmit the close contact information from the nodes inside the cluster directly to a base station or access point whenever a close contact of less than the contagion range occurred, avoiding the need of storing this data in the device and periodically (once a day, in some cases) accessing remote databases. For the case of using specific devices, with much lower computational and storage resources than mobile phones, that cannot access databases or maintain many contact IDs for many days, the mobile clustering scheme also reduces replicated data—due to selecting a single Cluster Head in charge of receiving and concentrating the information for the rest of the nodes in the cluster and concentrating this data into a single transmission to the city/institution administrator, making efficient use of the scarce RF and computational resources as well as reducing energy consumption compared to the case where each node constantly transmits data to the disease control agency. In a smart city environment, many contagion control points can be distributed in strategic parts of the city, such as schools, hospitals, access to massive transport services, and others to have close control of potential pedestrian contagion and swiftly take action to reduce and limit infection spreading.
By providing an individual monitoring system, like the one proposed in this work, using either a smartphone or specific devices provided by different institutions like universities, hospitals, etc., it is possible to maintain open many buildings and commerces, thus reducing the risk of contagion. For instance, universities can provide RF devices to all their students, professors, administrative personnel, etc., in order to remain open and isolate only both sick individuals and all the people that were in touch with them in specific periods and locations. The benefits of such specific devices are the additional security and privacy compared to using mobile phones. Indeed, in case of a cyber attack, hackers could obtain much more information from smartphones while monitoring devices can only provide IDs, which are only known by the appropriate authorities. It is important to note that the use of applications in the mobile phone is much easier than a device dedicated to contact tracing. However, as mentioned in [
22], there are many privacy concerns related to these applications, especially about systems based on tracking the geographical location of app users. This is one of the main deterrents for installing such tracking systems in personal mobile phones, especially in countries where governmental entities are not trusted (whether this appreciation is justified or not) by the general public or the official measures to combat the COVID-19 pandemic does not consider accurate contact tracking as the main tool to reduce strict confinement conditions. Such is the case of Latin America and Africa (note that there are no official applications listed in [
22] for countries like Mexico, Guatemala, Honduras, Angola, Egypt, and many more), where also the COVID-19 epidemic has high contagion levels [
23]. As such, applications in mobile phones are not a practical or preferred solution for all countries and cities to keep contact tracing information. For these cases, the use of a personal device provided by the university or factory or hospital, or any other place where a high concentration of people is expected, with no other information than a specific ID could be a much-accepted solution. It would also reduce cyber-attacks aimed at obtaining personal information from mobile phones. Hence, we argue that the use of specific devices may not be adopted as a general solution for contact tracing at the country level, but it may provide an effective and accepted solution for specific enterprises, commerce locations, and governmental and health entities that would allow an anticipated reopening solution to mitigate the economic and social negative impact of generalized lockdowns. For countries where mobile phone applications are well accepted, the mobile clustering scheme and results can be relevant and provide further insights on the performance of such solutions.
Some monitoring systems aim at keeping a close register regarding the specific individuals that enter a certain location. For instance, in Mexico City and China [
24], a governmental application using QR codes at the entrance of buildings and commerces, requires clients to scan the QR code in order to register the time at which a person was inside the facilities. Hence, if a certain person is diagnosed with COVID-19, such a system determines the people that were at the same time and place as the infected individual, which are at a high risk of contagion. However, this system is not accurate enough. Indeed, the fact that other people were inside the same building at the same time than an infected individual does not imply that they were at any time at contagion distance from each other: they could have been at different locations inside the building, never crossing paths, and the system could warn a higher number of people than needed to keep them in quarantine. In addition, the efficacy of such a system is compromised considering that the authorities implemented this service at the end of 2020 while confirmed COVID-19 cases increased exponentially in early 2021.
Other applications that use mobile phones to detect people in close range produce redundant information by requiring all of these nodes to transmit the list of people (mobile phones) that were close to them. This redundant information entails high energy consumption and implementation costs by using resources from the cellular system that are expensive. Conversely, our proposal keeps an accurate register of people that were in actual contagion distance from each other inside and outside buildings. Furthermore, a single user in a group of people is selected to convey this information to the disease control agency reducing the number of transmissions and redundancy.
The main contributions of this paper are:
We propose a novel mobile clustering scheme to efficiently gather information of close contact with other people in pedestrian scenarios.
We design and propose a specific communication protocol to implement a mobile clustering scheme.
We mathematically model the proposed mobile clustering scheme to study the system performance in different scenarios by providing a teletraffic analysis of the dynamics of contact instants and encounters in pedestrian scenarios.
We design and develop our own RF device with the specific objective of maintaining a record of people in close contact under the mobile clustering scheme.
Moreover, the derived mathematical model can be easily extended and adapted to different scenarios and cities in order to provide other services related to smart city applications in non-pandemic times, like intelligent access control to buildings or public transportation.
The rest of the paper is organized as follows: first, we present relevant works in the context of contact tracing systems. Then, the system model is described in detail. Following this,
Section 4 presents the main operation of the mobile clustering protocol. Then, the pedestrian mobility pattern is characterized in
Section 5. The mathematical model is derived in
Section 6 where all the variables and assumptions are explained. In
Section 7, we present the design and performance of the node developed for contact tracing purposes. The paper ends by presenting the most relevant results and conclusions.
2. Related Work
Contact tracing is an essential tool to improve the health of people and to reduce the economic impact of a pandemic such as the one derived by the SARS-CoV-2 virus [
13]. To this end, there have been many efforts to develop digital tools to keep track of contact among people to rapidly detect possible contagion hot spots.
For example, the study in [
12] describes the strict contact tracing scheme used in South Korea that uses data from the Global Positioning System (GPS), credit card transactions, and video surveillance among other systems in order to reduce the contagion cases of COVID-19, clearly showing the benefits of such policies.
Regarding the digital contact tracing tools, there are many different applications with government support in certain regions as mentioned in [
22], are centralized protocols concentrating all personal data (geo-localization) in state institutions. For instance, Israel approved the secret service to use surveillance measures to access information of users connected at different networks, which can have many potential privacy issues. Decentralized protocols like the one developed by Covid Watch, the CEN Protocol, based on Bluetooth Low Energy (BLE) using proximity among cellular phones to detect potential contagion cases. In this regard, the Pan-European Privacy-Preserving Proximity Tracing (PEPP-PT) project (a combination of centralized and decentralized approaches) developed a BLE app aimed at detecting such close interactions and avoid state surveillance activities. Later on, different institutions criticized the PEPP-PT for lack of transparency and privacy issues [
22]. Nonetheless, these decentralized approaches aim at protecting private information using anonymous keys that have no relation to the user’s identities. However, these applications do not function properly if only a small population uses the app [
25], which occurs even if workers are legally required to use it [
26]. However, in a closed environment such as universities or hospitals where employee access to the buildings can be conditioned on using a specific RF device just like ID is commonly required (or even IDs can be placed on such devices), our proposed device could be a better option since it does not require administrative access to the mobile phone in order to implement contact tracing and the exposure of smartphones is avoided, which can be potentially dangerous to people since mobile phones are reservoirs for various pathogens [
27]. In addition, apps that use Bluetooth and GPS to estimate the distance may over-report interactions leading to a high number of false positives [
22]. By contrast, the development of a specific device has the advantage of fine-tuning the
contagion range according to the specific needs thorough the careful design of antennas, amplifiers, and filters. Indeed, for COVID-19, the official recommendation is to avoid close contact of less than 1.5 or 2 m, but variations of this virus or for other viruses in the future, this social distancing can be different and the RF device can be designed accordingly, while GPS and Bluetooth systems cannot easily do. In this work, we propose the use of both approaches, based on apps on mobile phones and specific RF devices, in order to offer a general solution for contact tracing efforts in the sense that the mobile clustering scheme provides an efficient data reporting in pedestrian environments.
Many papers have studied the effectiveness and uses of contact tracking applications and models [
28]. For instance, in [
29], the authors perform different simulations to evaluate the effectiveness of such tools. However, they do not consider the real possible interactions between pedestrians. Instead, they rely on census data which have no information on contact times in a given trajectory, like our work.
In [
30], the authors consider a network-based model to calculate the infection spread in a close population. Specifically, this work proposes a stochastic simulation and moment closure approximation where nodes are placed at certain distances to calculate the probability that two connected nodes get infected. A similar approach is presented in [
31], where the authors study the dynamics of contagions using a stochastic epidemic model based on the embedded non-stationary Galton–Watson process. However, they do not consider the times that nodes are in contact with each other in a pedestrian movement pattern nor the dynamics of the nodes in such an environment.
In [
32], the authors discuss privacy and trade-offs of such contact tracing applications. To this end, we propose the use of specific nodes that do not contain personal information, except for an ID (assigned by the government, institute, enterprise, or health authority) and geo-localization data that present minimum risk in case of a cyber attack.
As mentioned in [
33], many applications use Bluetooth signal strength to calculate the distance among people and duration of such contact, while others rely on geo-localization data using GPS information to determine the proximity of individuals [
34,
35,
36,
37]. However, we propose to use direct transmissions to nodes in the proximity to clearly identify the people in close contact to others, which we believe would render more accurate proximity results since it implicitly considers the contact time that nodes were in contact with each other instead of instant contacts provided by Bluetooth and GPS signals. Additionally, by using the node developed and designed in our work, the contagion radius can be easily selected according to the specific disease phenomena, making our system general for current and future pandemics. In addition, the proposed mobile clustering scheme can inform of potential infection cases in hours, when the CHs report their data to the sink point when they are placed in strategic locations, or minutes if the cellular system is used. As mentioned in [
38], for a contact tracing tool to be effective, it has to report potential infection cases in less than one day, contrary to GPS-based solutions that have to be retrieved from GPS records that can take many days to analyze.
5. Mobility Statistics
In this section, we study in detail the duration of the connection times among nodes during their trajectory towards the entrance. Specifically, using the videos taken at rush hours, we determine the times that each node remains in each cluster either as a CH or CM.
Specifically, the videos show frame by frame the position of each pedestrian that walked along the street, giving us the location of each potential node (at this point, pedestrians are not equipped by RF nodes). These positions are placed in a virtual map, such as the one presented in
Figure 8. Then, each node is elected as either CM or CH, with probability
and
p, respectively, at the beginning of the street. This role can change while pedestrians move along the street. Each CH is depicted in this figure with a red circle with the node at the center. Then, the rest of the nodes (CMs) are associated with the closest CH. (In this case, it is a geometric distance, but, in the practical system, the distance can be approximated by the strength of the CH signal.) At this point, we can determine the connection time of each node in its corresponding cluster.
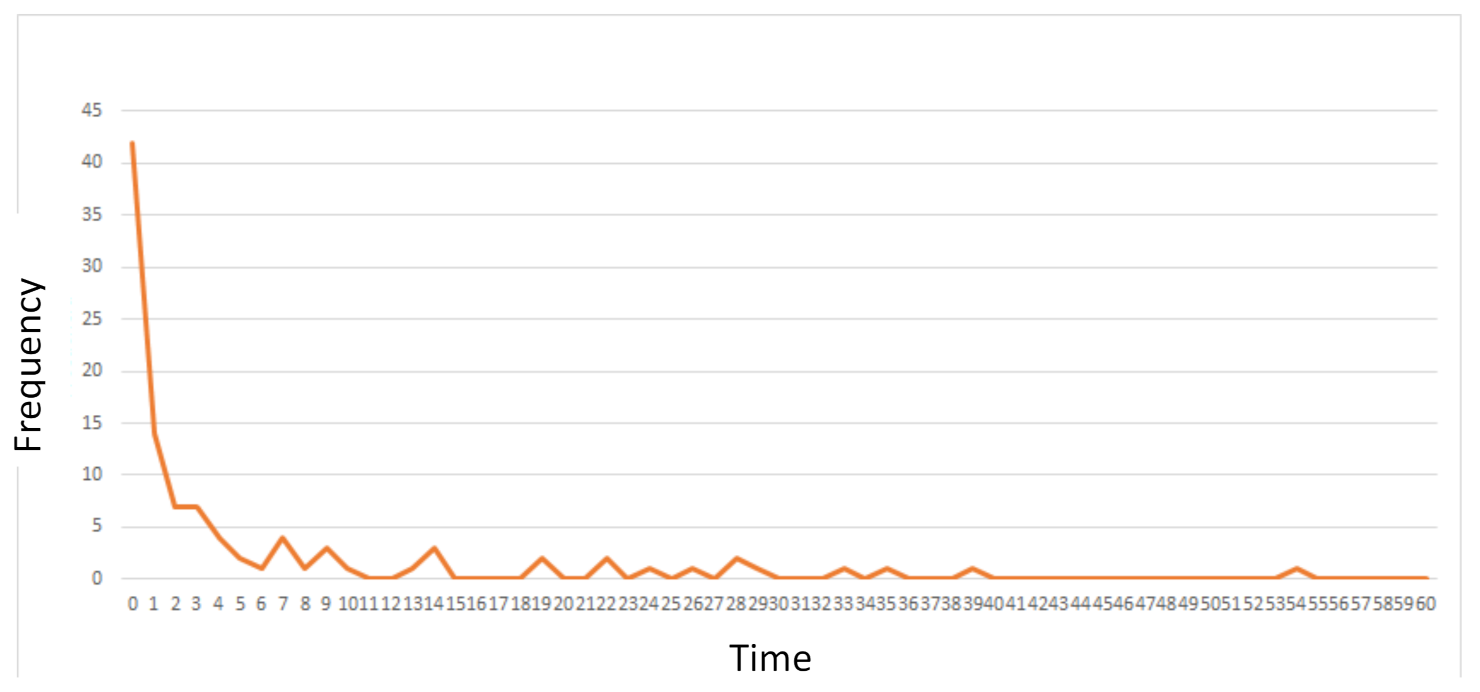
Building on this, we find the connection time histograms considering all the connection times from all of the videos (all pedestrian trajectories recorded) such as the one presented in
Figure 9, which is obtained for a radius of 2.5 m, i.e., the red virtual circle is scaled to be 2.5 m. The histograms represent the frequency or the number of samples in each connection time bin. From this, we can characterize the probability density function as described below.
For each histogram, we determine some statistical parameters, such as the mean (
), standard deviation (
), variance (
), and Coefficient of Variation (
), which are defined as follows [
41]:
where
n is the number of connection times measured in the pedestrian trajectories considering
contagion ranges of 2.5, 3.0, 3.5, and 4.0 m, and 2, 3, 4, and 5 initial CHs. (We consider that some nodes can enter the facilities as either CH or CM and we want to study the effect of having a different number of CHs on the performance of the mobile clustering protocol.) As a result of this analysis, we obtained a CoV higher than one for all considered cases (
). This information is relevant because a Hyper-Exponential distribution can be used to model these connection times. The mathematical model presented below is based on this fact.
In addition, note that, as the communication range increases, the mean connection time is increased accordingly, which is an expected result since pedestrians remain connected longer times.
Phase-Type Distributions for Pedestrian Connection Times
Given that all the connection times have a
, we focus on finding the parameters of a Hyper-Exponential distribution. This distribution is obtained using two exponential distributions, where the first one with rate
is selected in probability
p, and the other one with rate
has the complementary probability
, as shown in the following
Figure 10, where each phase represents a random exponentially distributed value with rate
and
, respectively.
From this, the probability density function is described by [
42]
Then, the mean is given by
and the variance can be calculated, after some algebraic manipulation, as
Solving (7) for
p, we get
Clearly from this expression, we have the following restrictions:
and
, then:
Using these expressions, we can find all the parameters of the Hyper-Exponential distribution, namely,
p,
, and
, for each pedestrian environment. The fitting distributions are shown in
Table 1,
Table 2,
Table 3 and
Table 4.
6. Mathematical Model
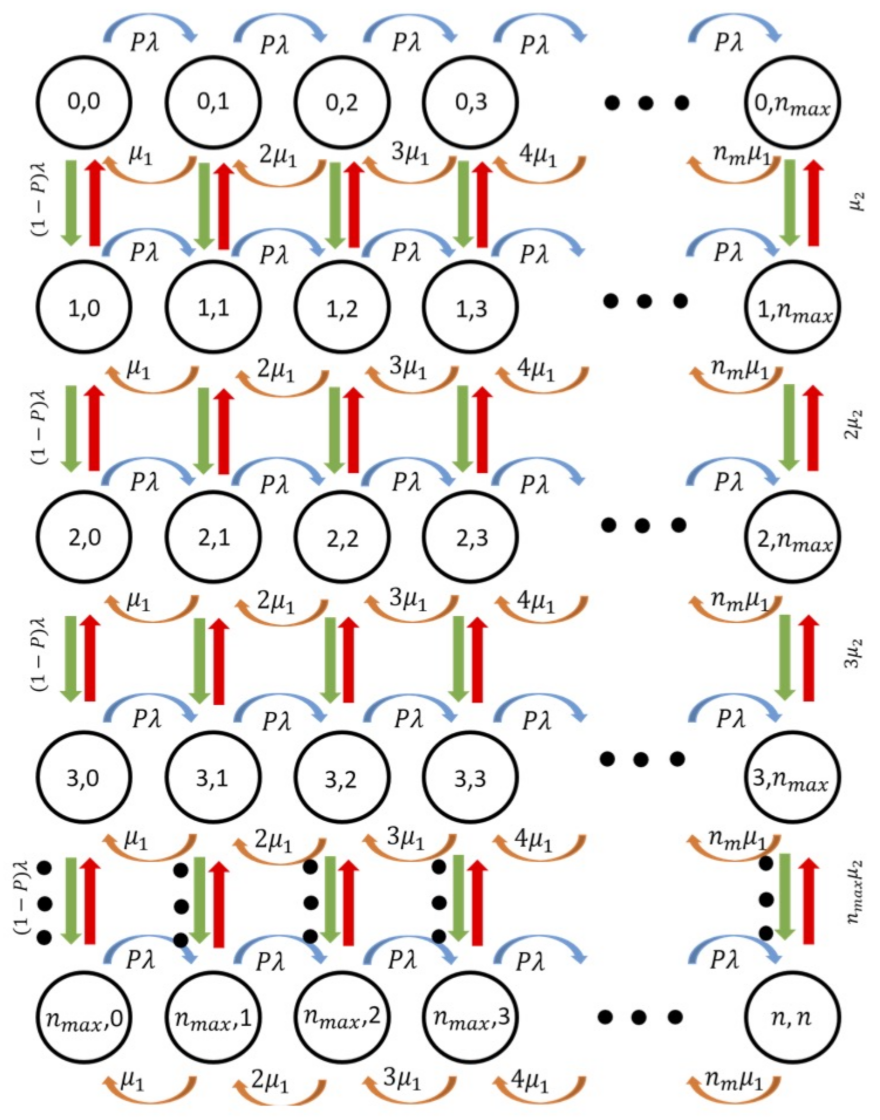
We model the potential contagion risk through the time and distance that a node was in contact with another node that later was proven to be positive for SARS-CoV-2 or any other virus that propagates in the air and through the close interchange between people in a pedestrian case. To this end, we derive and numerically solve a Continuous Time Markov Chain (CTMC), depicted in
Figure 11, where the states represent the number of nodes inside a mobile cluster. As shown above, the times inside a mobile cluster can be modeled using hyper-exponentially distributed random times. As such, nodes can experience times inside a cluster exponentially distributed either with rate
(and probability
p), or with rate
(and probability
). The values of these parameters are shown in
Table 1,
Table 2,
Table 3 and
Table 4 depending on the particular scenario (number of initial CHs and contagion radio).
Building on this, each state of the proposed CTMC is formed as an order pair , where i is the number of nodes in phase 1 (nodes enter this phase with probability p) and j is the number of nodes in phase 2 (nodes enter this phase with probability ). Nodes remain in this phase during the time inside the cluster until they leave it or the cluster vanishes. Hence, the valid states space is described by . For the specific pedestrian scenarios considered in this work, the number of people in close interactions was not higher than 10. As such, we observe that , which is the maximum number of nodes inside a mobile cluster observed during the real pedestrian trajectories, but the Markov chain is not limited to this number. In fact, would take the proper value according to the system conditions, i.e., the values of p, , , and , which is also true for our analysis. In addition, we calculated the rate at which nodes can enter an already formed mobile cluster, according to the specific speed and trajectory of each recorded pedestrian.
From this, we can see that transitions in the Markov Chain occur as follows:
When the system is in the state (), it moves to the state when a new arrival to phase 1 occurs with rate (in case of arrival, i.e., a node entering a particular mobile cluster in phase 1); it moves to the state when a new arrival happens to phase 2 with rate (in case of an arrival to phase 2); the system goes to state with rate when a node in phase 1 leaves the cluster; and to state with rate when a node in phase 2 leaves the cluster.
When the system is in the state (), the system moves to the state when a new arrival to phase 1 occurs with rate (in case of arrival, i.e., a node entering a particular mobile cluster in phase 1); it moves to the state when a new arrival happens to phase 2 with rate (in case of an arrival to phase 2); note that the system cannot transit to the state ; and it moves to the state with rate when a node in phase 2 leaves the cluster.
A similar behavior like the previous case occurs in the state () with the appropriate modifications.
When the system is in the state (), it cannot move to the state ; it moves to the state when a new arrival happens to phase 2 with rate (in case of an arrival to phase 2); the system goes to the state with rate when a node in phase 1 leaves the cluster and to the state with rate when a node in phase 2 leaves the cluster.
A similar behavior like the previous case occurs in the state () with the appropriate modifications.
In the state , only arrivals are allowed, and, in the state only departures can occur with the appropriate rates.
Nodes cannot transit from phase 1 (2) to phase 2 (1) due to the nature of the hyper-exponential process, i.e., nodes either remain in the system with rate
or
but not a combination of these rates, as shown in
Figure 10. Since this chain corresponds to an irreducible CTMC, we numerically solve it using the rate equalization method to find the stable state probabilities,
that represent the probability that the cluster has
i nodes in phase 1 and
j nodes in phase 2.
Note that this Markov Chain can model all the dynamics of the system, and we use it to obtain the main system performance parameters. First, the average number of nodes in a cluster is calculated. Recall that the state of the Markov chain depicts the number of nodes in phase 1,
i, and the number of nodes in phase 2,
j, then
gives the actual number of nodes at each instant with probability
, which is found numerically solving the Markov Chain. Hence, the average number of nodes can be calculated as:
Then, we calculate the probability that a packet is successfully transmitted from a CM to their respective CH. Since CM only transmits with probability
after the reception of the beacon packet, the system behaves as a Slotted ALOHA random access protocol [
43], where slots have a duration of
seconds. In view of this, the packet success probability in a beacon period, when there are
i nodes in phase 1 and
j nodes in phase 2, can be calculated as:
Hence, the average successful transmission probability in the system can be calculated as:
Similarly, the probability of idle beacon period, i.e., the probability that no node transmits in the beacon period when there are
i nodes in phase 1 and
j nodes in phase 2, can be calculated as:
Hence, the average idle probability in the system can be calculated as:
Finally, the packet collision probability can be calculated as:
8. Numerical Results
We now discuss some of the relevant results of this study. First, we validate the Markov chain by comparing the average number of nodes per cluster using the real trajectories and the results obtained through the mathematical model. In
Figure 18, we present these results for a different number of initial CHs and contagion radii. We can observe that the results of the model closely match the results of the real trajectories, lightly overestimating the number of nodes having a maximum difference of 0.6 nodes in the worst case. Hence, we believe that the model correctly predicts the behavior of the mobile clustering scheme and can be used to design and analyze contact tracing in other scenarios.
We further verify the accuracy of the mathematical model by calculating the packet success probability using Equation (
12) and comparing it to simulation results. The simulation model consists of tracking each individual node and simulating the mobile clusters based on the protocol described in
Section 4. Specifically, we choose the initial number of CHs (2, 3, 4, and 5) by randomly selecting the nodes in the system. Then, the selected CHs begin the beacon transmission. At this point, the system can be found in any of the possible operation scenarios previously described. Then, after all the clusters are found with a single CH and multiple CMs, the packet transmission procedure from CMs to CH begins. Whenever a CM successfully transmits its packet, it stops further transmissions. From this, the simulation counts the time where a single transmission occurs in order to find the success transmission probability (labeled as Real Walk) divided by the total operation time and is compared to the analytical results as shown in
Figure 19.
From these results, we can see a good match between simulation and analytical results, especially for two and three initial CHs. In the case of four and five initial CHs, the analytical results slightly separate from the simulation results. The rationale of this is that the mathematical model does not consider the cases where clusters are broken and rebuild in case CH leaves and/or enters a different cluster. Even if we propose the appropriate rules for the mobile clustering protocol to react to these cases, the Markov chain only considers a normal operation situation where clusters are formed by a single CH and multiple CMs. However, the simulation considered all the operation time. As such, in the simulation results, the successful time is lower due to this forming and reforming time of clusters. This effect is further accentuated when the contagion range is increased since the CHs cover a higher area and is more probable to have multiple CHs inside a single cluster, causing higher reconfiguring times.
Now that the mathematical model is validated, and the system variables where the model is more accurate are identified, the following figures use the numerical results derived from the Markov chain and Equations (12) and (13). In
Figure 20, we present the success, idle, and collision probabilities in a beacon period. From these results, it is important to note that the successful transmission probability achieves a maximum value when
is in the range of 0.4 to 0.6. For lower values of
, the idle (collision) probability is too high (low), while, for higher values, the collision (idle) probability increases (decreases). This is true for almost all values of the initial number of CHs and contagion range.
Another interesting observation is that the performance of the system in terms of these probabilities does not vary much for different radii, which can be explained by observing the dynamics of the pedestrian movement. Indeed, we observe that most of the pedestrians are close to each other and tend to remain together during the trajectories, closer than the minimum contagion range. As such, the number of nodes per cluster is not impacted by increasing the contagion range. We believe that this characteristic may be similar in other scenarios where people are walking to the entrance of another facility or building or subway station, where many people remain in the same range for long periods. However, in other cases, such as people walking in a commercial mall or a park, this characteristic may not be present. We leave this research line open for future works.
Finally, in
Figure 21, we present the system performance of the mobile clustering scheme compared to the non-clustered system, i.e., where nodes transmit directly to the sink node. In this case, the sink is located at the entrance of the building. Hence, in the non-clustered system, when nodes enter the communication range of the sink node, they transmit with probability
.
We can see that the mobile clustering scheme entails better performance than the non-clustered system, in terms of higher successful transmission and lower packet collision probability for almost all the cases investigated, proving the effectiveness of the proposed scheme.
9. Conclusions
In this work, we develop a mobile clustering protocol to efficiently provide contact tracing information for contagion contention purposes. We frame this work in the context of smart cities where smartphones of the population or specific communication devices actively share their information with a trusted authority. In a smart city environment, nodes and personal communication devices collaborate with the city administration to achieve common goals for the benefit of the residents and population in general. Since personal information (location and health status) is used to detect possible disease-spreading hot spots, the system has to be supervised and managed by a trusted health authority. The aforementioned system is mathematically modeled, studied, analyzed, and verified through simulation results. The model is accurate in most of the presented scenarios and system parameters. Hence, it can be used for system design in different scenarios than the ones presented in this work. In addition, we designed and constructed an RF capable device that could be used in closed communities, such as university campuses, governmental buildings, hospitals, and schools among others. We focused our research on pedestrians entering the university campus in order to have a controlled environment and obtain data in an expedited manner. However, the same methodology can be used for any other environment, such as commercial, leisure, cultural, and sports events, among others. For these other applications, the first step is to characterize the connection times among people given by the mobility pattern in each scenario, i.e., determine the probability density function of the connection times. In our case, we obtained a Hyper-Exponential distribution where all the parameters were obtained through visual observation. However, in a future work, these times can be obtained directly by the data generated by the Radio Frequency devices or the mobile phones performing the contact tracing application. Given these connection times, we can perform a similar mathematical analysis of the system in order to obtain preliminary/theoretical performance metrics by solving the corresponding Markov Chain. It is important to note that the mobile clustering scheme is independent of these connection times and can operate in any mobility scenario, since CHs and CMs are elected in a distributed manner and based on the number of nodes in the neighborhood. In a future work, we intend to determine the performance of the mobile clustering scheme in such alternative scenarios.
The use of these contact tracing tools will be fundamental in the efforts to control and reduce the impact of the COVID-19 pandemic and future pandemic to come. As such, it is important to have the mathematical and hardware tools to design and implement computational tools in a timely manner in emergency cases. As an additional feature of this work, the use of mobile clusters can be extended to many other applications such as traffic control in vehicular networks or vehicle tracing where also specific devices may be required. In smart city applications in conjunction with autonomous driving scenarios, it may provide a valuable tool for safety and data dissemination.


 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}