
Exploring Neurofeedback Training for BMI Power Augmentation of Upper Limbs: A Pilot Study

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
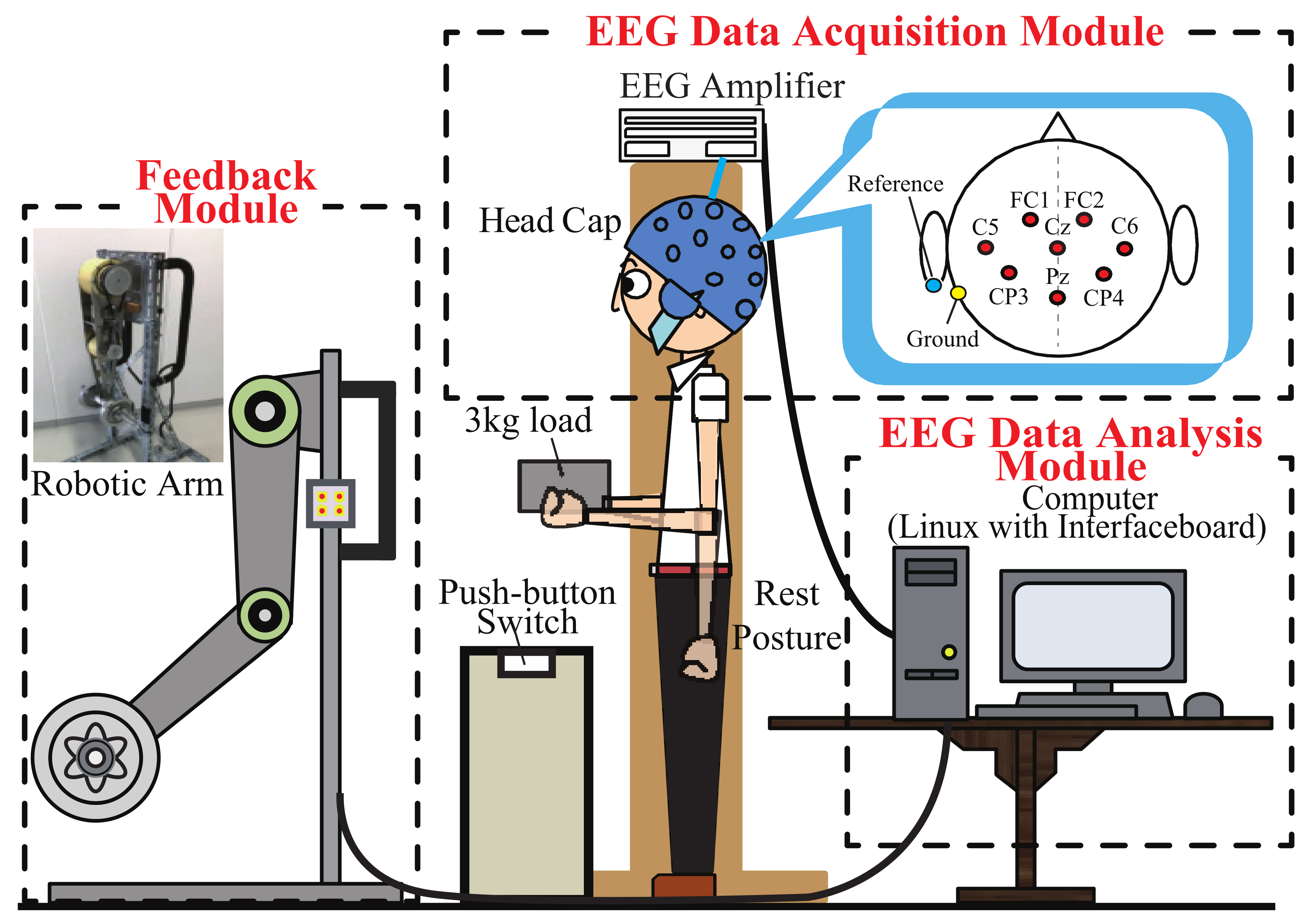
2.2. System Construction
2.2.1. System Software Architecture
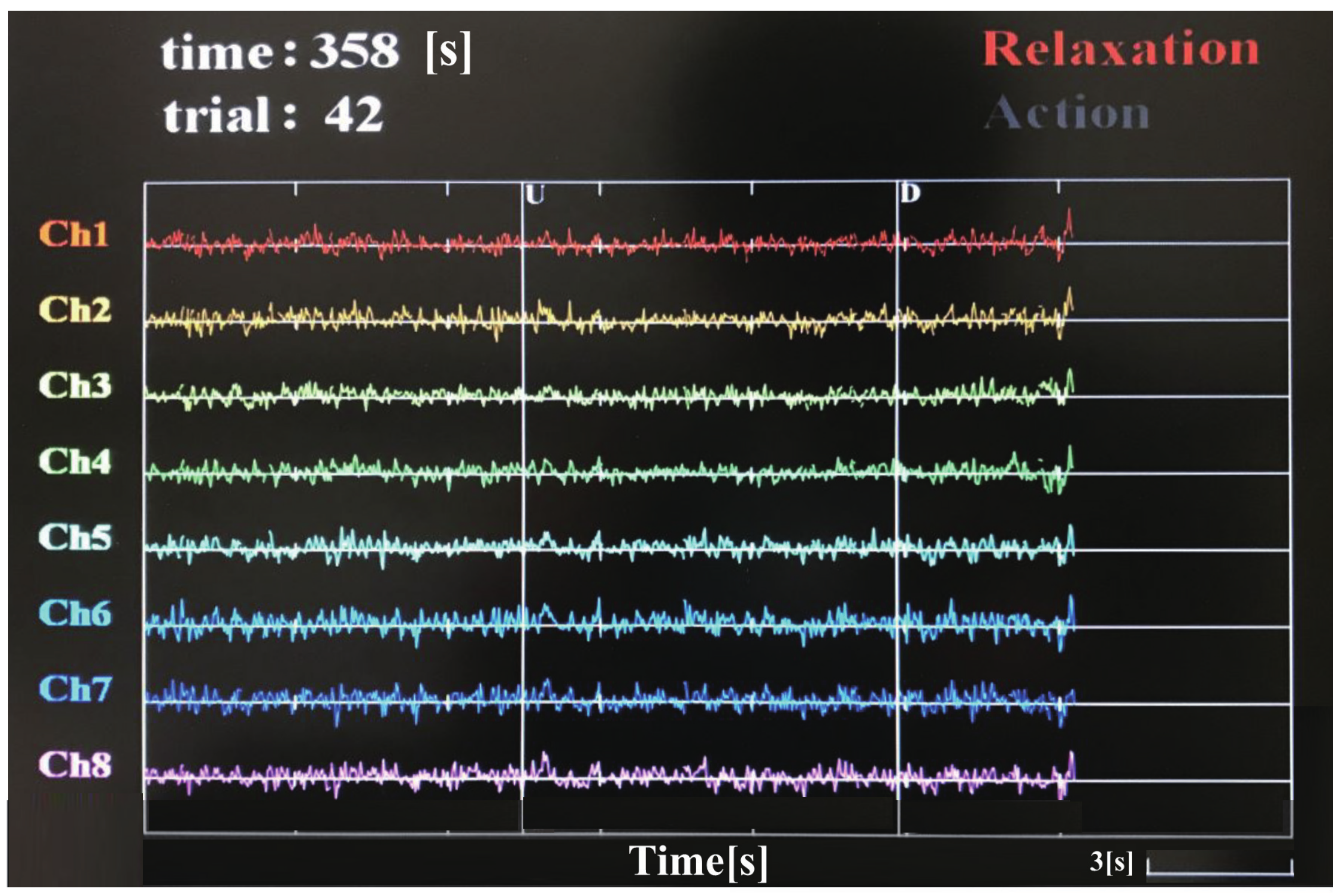
2.2.2. Real-Time EEG Data Acquisition
2.2.3. Robotic Arm for Feedback
2.2.4. BMI Decoder for Power Augmentation
- when , flexion mode ()
- when , extension mode ()
- when , holding mode ()
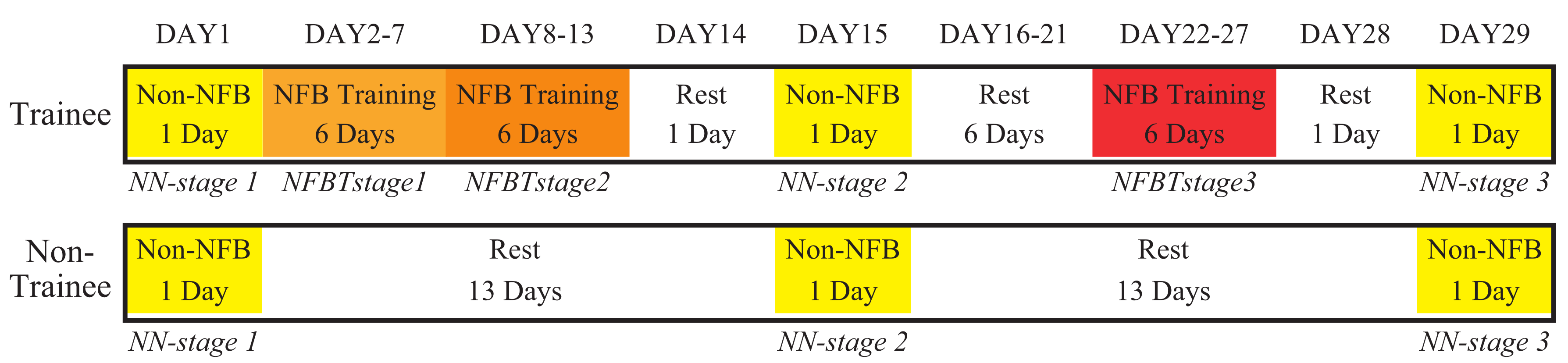
2.3. NFB Training Procedure and Tasks
2.4. EEG Off-Line Analysis
2.4.1. EEG Preprocessing
2.4.2. EEG Data Analysis
3. Results
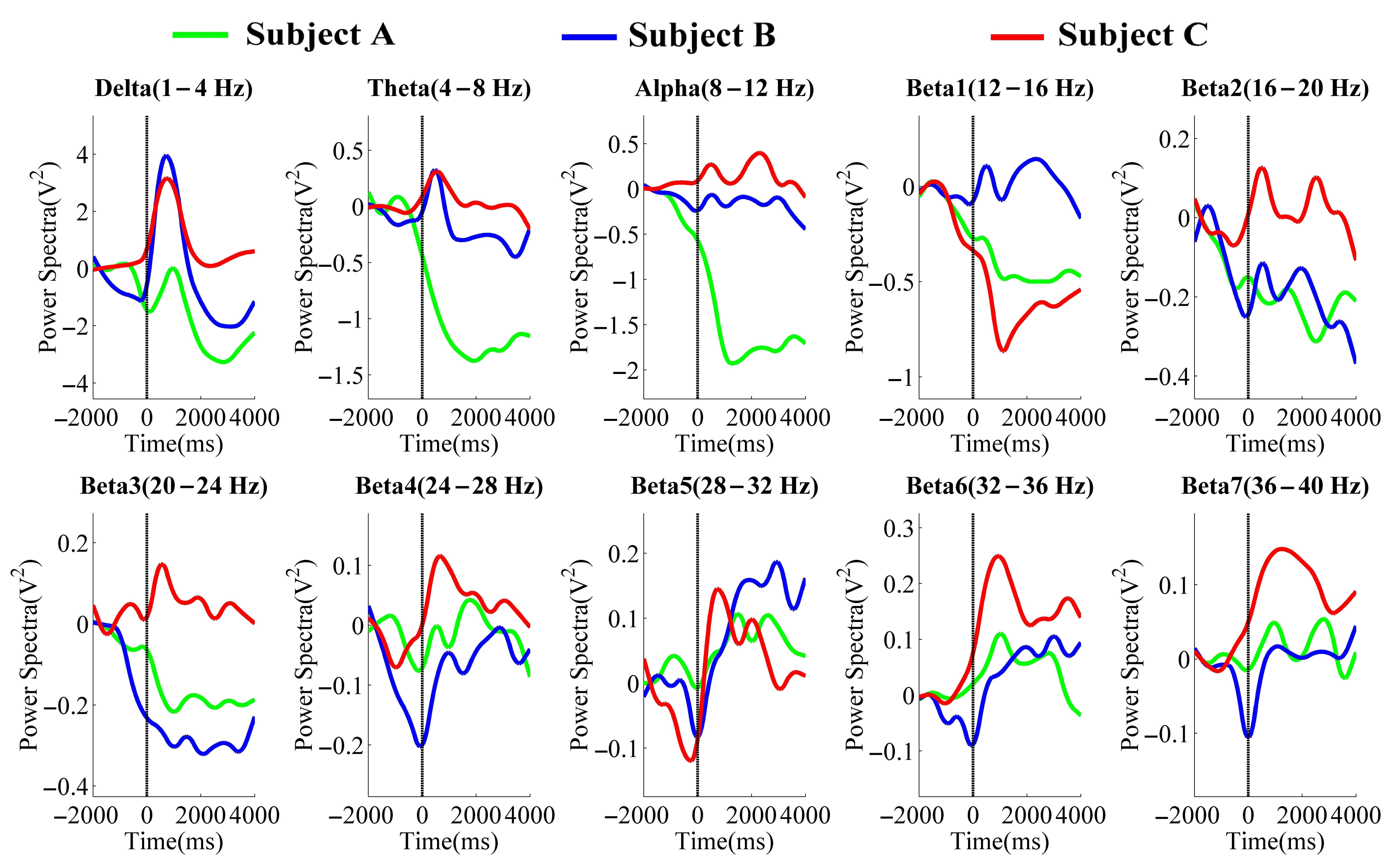
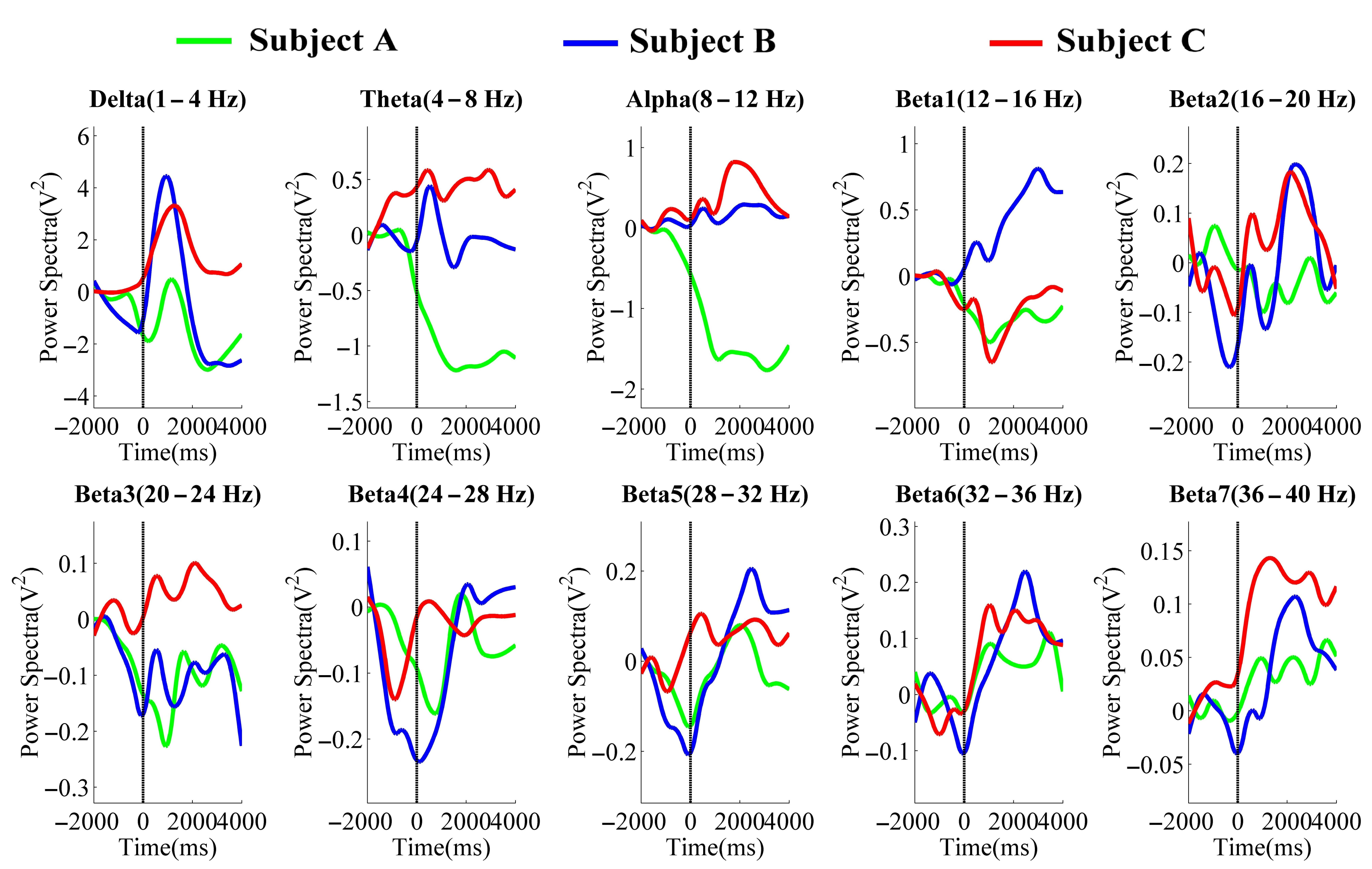
3.1. Frequency Band Determination for NFB Training
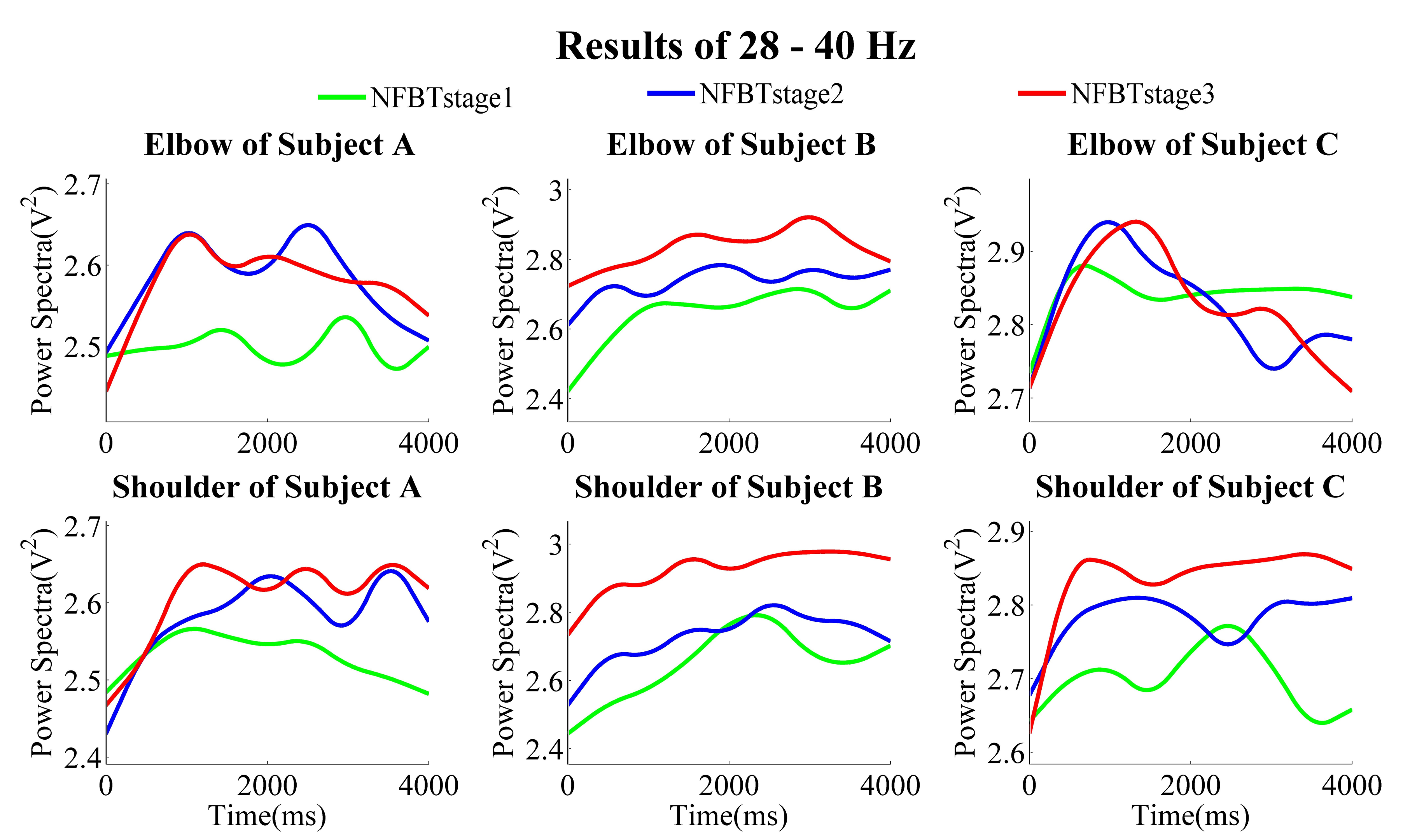
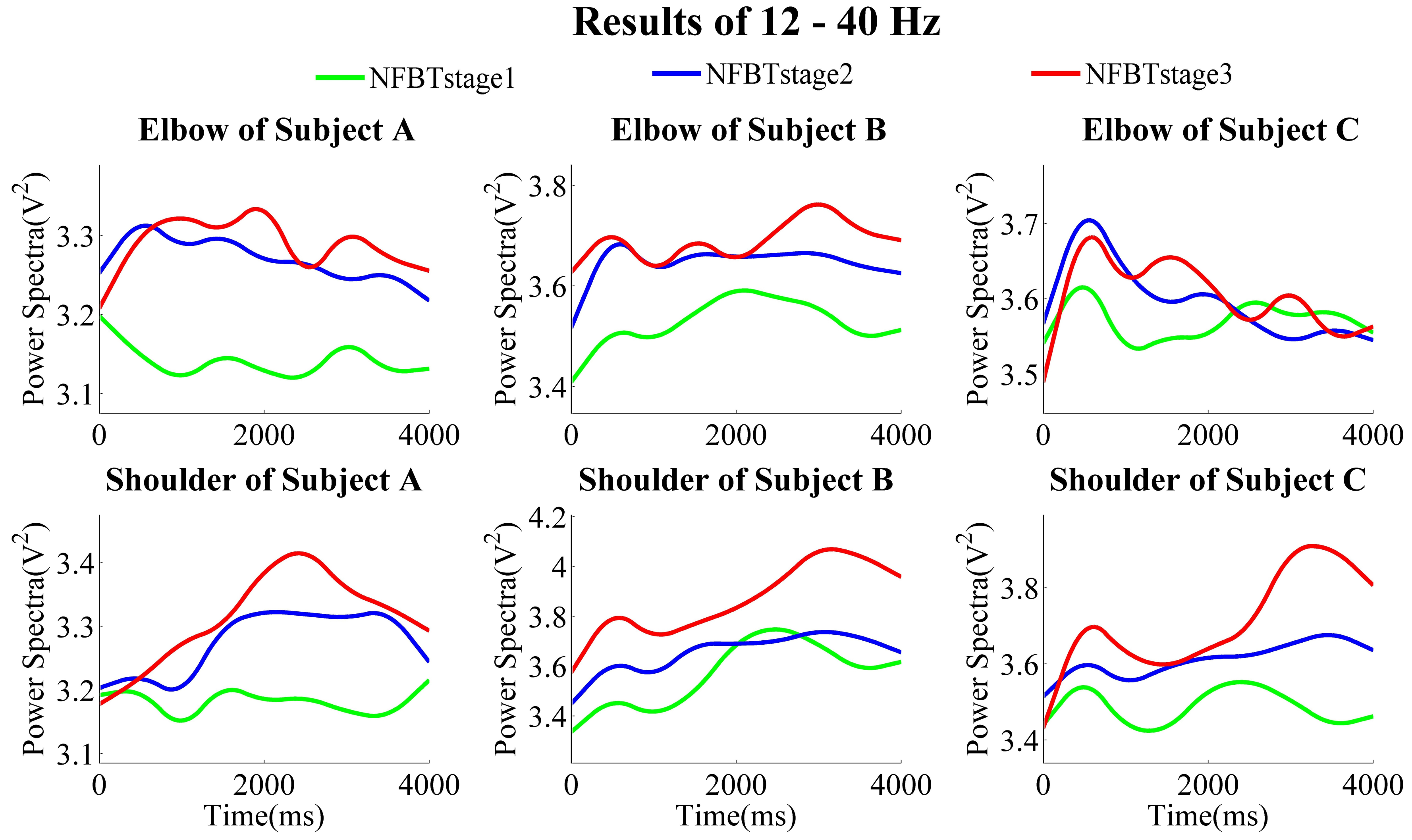
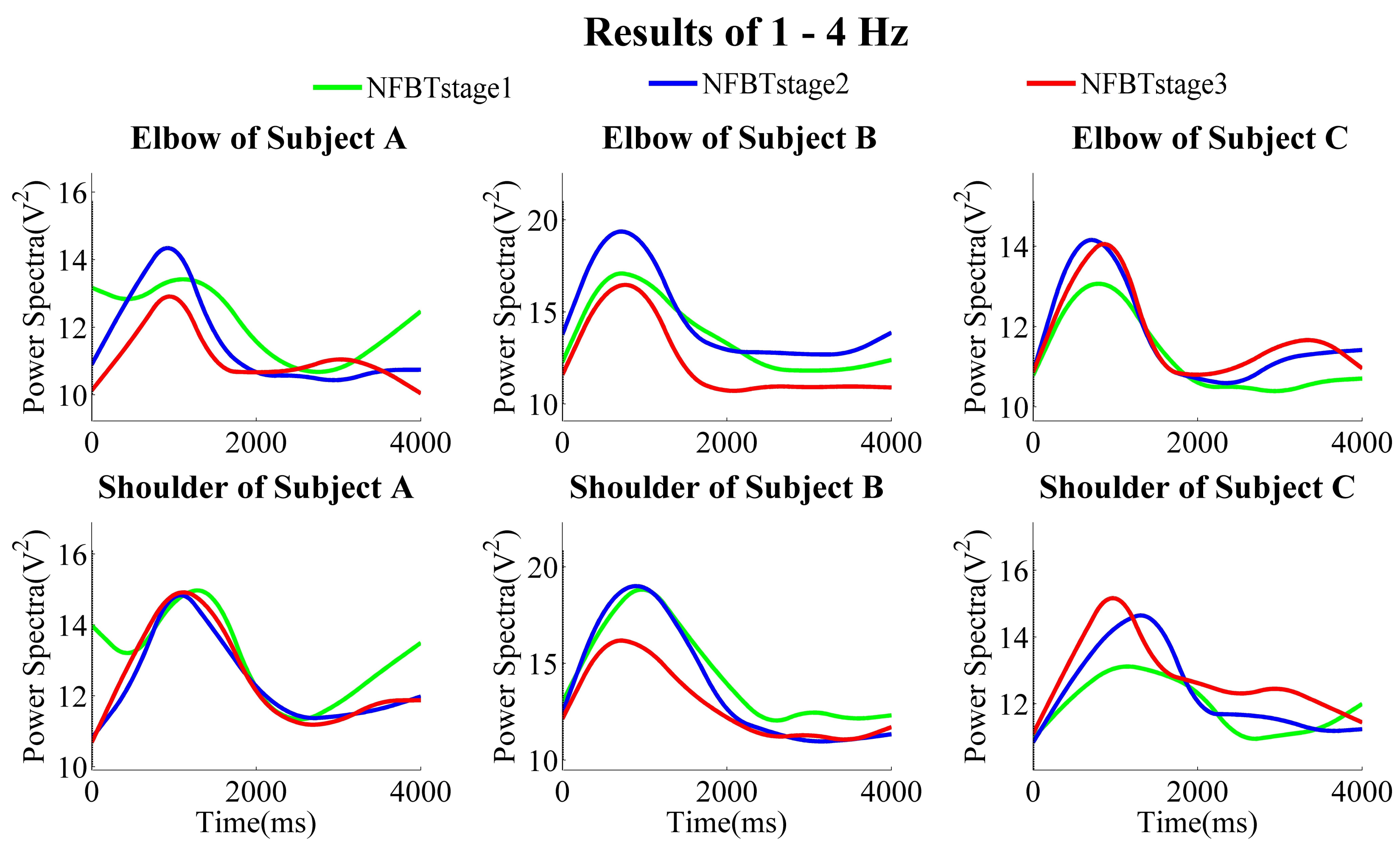
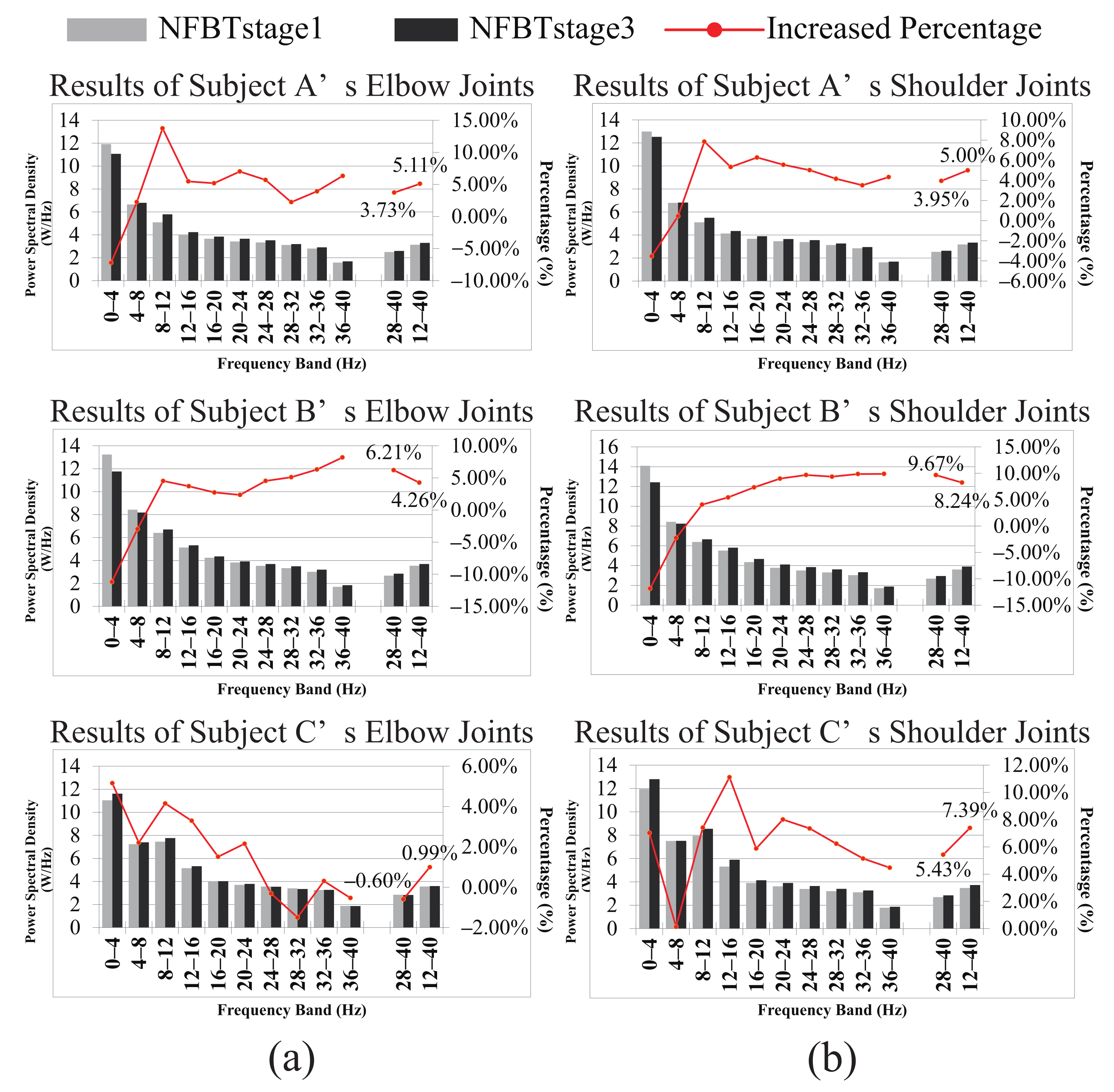
3.2. Results of the Three NFB Training Stages
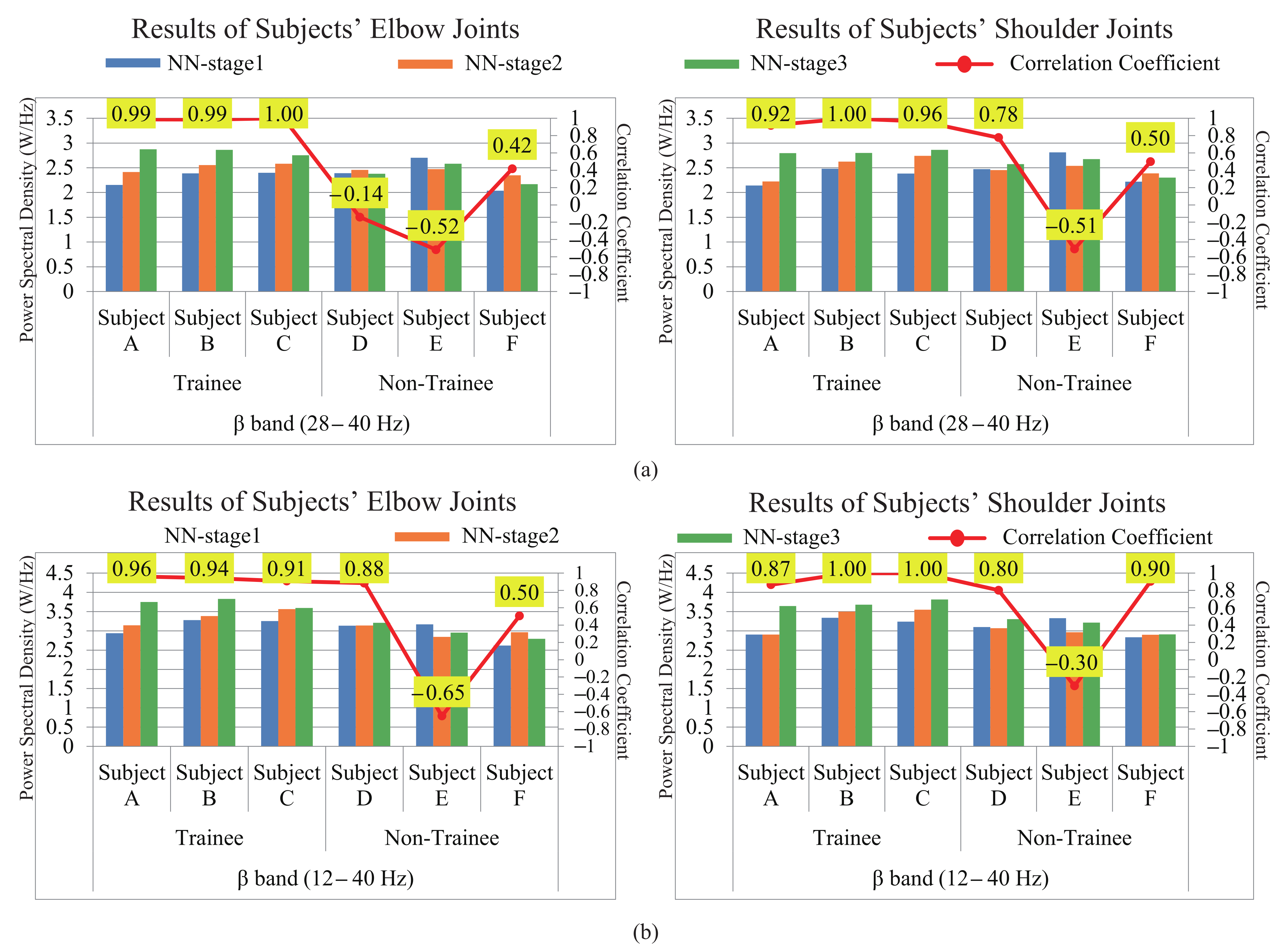
3.3. NFB Training Effect Evaluation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BMI | brain-machine interface |
| EEG | electroencephalography |
| PA | power augmentation |
| EMG | electromyography |
| NFB | neurofeedback |
| NFBT | neurofeedback training |
| FFT | fast Fourier transform |
| ICA | independent component analysis |
| PCA | principal component analysis |
| TFD | time-frequency distributions |
| SNR | signal-to-noise ratio |
| SMR | sensorimotor rhythm |
| RTAI | real-time application interface |
| FEA | flexion and extension arm |
| PSD | power spectral density |
| A/D | analog/digital |
| IC | independent component |
| STFT | short-time Fourier transform |
| CC | correlation coefficient |
| fMRI | functional magnetic resonance imaging |
References
- Jun, T. Action and the Brain, 2nd ed.; Series 17; Kyoritsu Shuppan Ltd.: Tokyo, Japan, 2009. (In Japanese) [Google Scholar]
- Van Dokkum, L.E.H.; Ward, T.; Laffont, I. Brain computer interfaces for neurorehabilitation—Its current status as a rehabilitation strategy post-stroke. Ann. Phys. Rehabil. Med. 2015, 58, 3–8. [Google Scholar] [CrossRef] [Green Version]
- Mirkovic, B.; Bleichner, M.G.; De Vos, M.; Debener, S. Target speaker detection with concealed EEG around the ear. Front. Neurosci. 2016, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Zhu, C.; Yoshikawa, Y.; Yoshioka, M.; Uemoto, K.; Yu, H.; Yan, Y.; Duan, F. EMG estimation from EEGs for constructing a power assist system. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 419–424. [Google Scholar]
- Liang, H.; Yu, Y.; Mochida, M.; Liu, C.; Ueda, N.; Li, P.; Zhu, C. EEG-Based EMG Estimation of Shoulder Joint for the Power Augmentation System of Upper Limbs. Symmetry 2020, 12, 1851. [Google Scholar] [CrossRef]
- Liang, H.; Zhu, C.; Tian, Y.; Iwata, Y.; Maedono, S.; Yu, H.; Yan, Y.; Duan, F. Construction of power assistive system for the control of upper limb wearable exoskeleton robot with electroencephalography signals. In Proceedings of the 2017 IEEE International Conference on Cyborg and Bionic Systems (CBS), Beijing, China, 17–19 October 2017; pp. 165–168. [Google Scholar]
- Megan, T.D.; Cohen, J.D.; Lee, R.F.; Norman, K.A.; Turk-Browne, N.B. Closed-loop training of attention with real-time brain imaging. Nat. Neurosci. 2015, 18, 470–475. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems; Addison Wesley: Boston, MA, USA, 1998. [Google Scholar]
- Skinner, B.F. The Behavior of Organisms: An Experimental Analysis; BF Skinner Foundation: Cambridge, MA, USA, 2019. [Google Scholar]
- Kamiya, J. Operant control of the EEG alpha rhythm and some of its reported effects on consciousness. In Altered States of Consciousness; Tart, C.T., Ed.; John Wiley and Sons: New York, NY, USA, 1969. [Google Scholar]
- Lindsley, D.B. Psychological phenomena and the electroencephalogram. Electroencephalogr. Clin. Neurophysiol. 1952, 4, 443–456. [Google Scholar] [CrossRef]
- Hebb, D.O. The Organization of Behavior. A Neuropsychological Theory; John Wiley and Sons, Inc.: New York, NY, USA, 1949. [Google Scholar]
- Merieb, E.N.; Hoehn, K. Human Anatomy & Physiology, 7th ed.; Benjamin Cummings: San Francisco, CA, USA, 2006. [Google Scholar]
- Semetko, H.; Scammell, M. The SAGE Handbook of Political Communication; SAGE Publications Ltd.: Thousand Oaks, CA, USA, 2012. [Google Scholar]
- Perdikis, S.; Tonin, L.; Saeedi, S.; Schneider, C.; Millán, J.D.R. The Cybathlon BCI race: Successful longitudinal mutual learning with two tetraplegic users. PLoS Biol. 2018, 16, e2003787. [Google Scholar] [CrossRef] [PubMed]
- Essrich, S.L. Cybathlon: Moving People and Technology [Regional]. IEEE Robot. Autom. Mag. 2020, 27, 16–18. [Google Scholar] [CrossRef]
- Shedeed, H.A.; Issa, M.F.; El-Sayed, S.M. Brain EEG signal processing for controlling a robotic arm. In Proceedings of the IEEE 2013 8th International Conference on Computer Engineering & Systems (ICCES), Cairo, Egypt, 26–28 November 2013; pp. 152–157. [Google Scholar]
- Qiu, S.; Yi, W.; Xu, J.; Qi, H.; Du, J.; Wang, C.; He, F.; Ming, D. Event-related beta EEG changes during active, passive movement and functional electrical stimulation of the lower limb. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 283–290. [Google Scholar] [CrossRef]
- Cvetkovic, D.; Übeyli, E.D.; Cosic, I. Wavelet transform feature extraction from human PPG, ECG, and EEG signal responses to ELF PEMF exposures: A pilot study. Digit. Signal Process. 2008, 18, 861–874. [Google Scholar] [CrossRef]
- Liang, H.; Zhu, C.; Iwata, Y.; Maedono, S.; Mochita, M.; Liu, C.; Ueda, N.; Li, P.; Yu, H.; Yan, Y.; et al. Feature Extraction of Shoulder Joint’s Voluntary Flexion-Extension Movement Based on Electroencephalography Signals for Power Assistance. Bioengineering 2019, 6, 2. [Google Scholar] [CrossRef] [Green Version]
- Subasi, A.; Kiymik, M.K.; Alkan, A.; Koklukaya, E. Neural network classification of EEG signals by using AR with MLE preprocessing for epileptic seizure detection. Math. Comput. Appl. 2005, 10, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Zhu, C.; Yoshioka, M.; Ueda, N.; Tian, Y.; Iwata, Y.; Yu, H.; Duan, F.; Yan, Y. Estimation of EMG signal for shoulder joint based on EEG signals for the control of upper-limb power assistance devices. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6020–6025. [Google Scholar]
- Guerrero-Mosquera, C.; Vazquez, A.N. New approach in features extraction for EEG signal detection. In Proceedings of the IEEE 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 13–16. [Google Scholar]
- Übeyli, E.D. Analysis of EEG signals by implementing eigenvector methods/recurrent neural networks. Digit. Signal Process. 2009, 19, 134–143. [Google Scholar] [CrossRef]
- Oh, S.H.; Lee, Y.R.; Kim, H.N. A novel EEG feature extraction method using Hjorth parameter. Int. J. Electron. Electr. Eng. 2014, 2, 106–110. [Google Scholar] [CrossRef] [Green Version]
- Übeyli, E.D. Statistics over features: EEG signals analysis. Comput. Biol. Med. 2009, 39, 733–741. [Google Scholar] [CrossRef]
- Klimesch, W. EEG alpha and theta oscillations reflect cognitive and memory performance: A review and analysis. Brain Res. Rev. 1999, 29, 169–195. [Google Scholar] [CrossRef]
- Palva, S.; Palva, J.M. New vistas for a-frequency band oscillations. Trends Neurosci. 2007, 30, 150–158. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Andrew, C. Event-related changes of band power and coherence: Methodology and interpretation. J. Clin. Neurophysiol. 1999, 16, 512. [Google Scholar] [CrossRef]
- Van Albada, S.J.; Robinson, P.A. Relationships between Electroencephalographic Spectral Peaks Across Frequency Bands. Front. Hum. Neurosci. 2013, 7, 56. [Google Scholar] [CrossRef] [Green Version]
- Sterman, M.B.; Friar, L. Suppression of seizures in an epileptic following sensorimotor EEG feedback training. Electroencephalogr. Clin. Neurophysiol. 1972, 33, 89–95. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Scherer, R.; Leeb, R.; Keinrath, C.; Neuper, C.; Lee, F.; Bischof, H. Viewing moving objects in virtual reality can change the dynamics of sensorimotor EEG rhythms. Presence Teleoperators Virtual Environ. 2007, 16, 111–118. [Google Scholar] [CrossRef]
- Prinzel, L.J., III. The relationship of self-efficacy and complacency in pilot-automation interaction. No. NAS 1.15 2002, 211925. [Google Scholar]
- Zhu, C.; Okada, Y.; Yoshioka, M.; Yamamoto, T.; Yu, H.; Yan, Y.; Duan, F. Power augmentation of upper extremity by using agonist electromyography signals only for extended admittance control. IEEJ J. Ind. Appl. 2014, 3, 260–269. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Zhu, C.; Liang, H.; Yoshioka, M.; Murata, Y.; Yu, Y. Development of a light wearable exoskeleton for upper extremity augmentation. In Proceedings of the IEEE 2016 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–6. [Google Scholar]
- Ramachandran, V.S.; Oberman, L.M. Broken mirrors: A theory of autism. Sci. Am. 2006, 295, 62–69. [Google Scholar] [CrossRef] [PubMed]
- Arns, M.; Conners, C.K.; Kraemer, H.C. A decade of EEG theta/beta ratio research in ADHD: A meta-analysis. J. Atten. Disord. 2013, 17, 374–383. [Google Scholar] [CrossRef] [PubMed]
- Ni, Y.; Holtmann, D.; Hollmann, F. How green is biocatalysis? To calculate is to know. ChemCatChem 2014, 6, 930–943. [Google Scholar] [CrossRef]
- Cortese, S.; Ferrin, M.; Breis, D.; Holtmann, M.; Aggensteiner, P.; Daley, D.; Santosh, P.; Simonoff, E.; Stevenson, J.; Stringaris, A.; et al. Neurofeedback for attention-deficit/hyperactivity disorder: Meta-analysis of clinical and neuropsychological outcomes from randomized controlled trials. J. Am. Acad. Child Adolesc. Psychiatry 2016, 55, 444–455. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghaziri, J.; Tucholka, A.; Larue, V.; Blanchette-Sylvestre, M.; Reyburn, G.; Gilbert, G.; Lévesque, J.; Beauregard, M. Neurofeedback training induces changes in white and gray matter. Clin. EEG Neurosci. 2013, 44, 265–272. [Google Scholar] [CrossRef]
- Megumi, F.; Yamashita, A.; Kawato, M.; Imamizu, H. Functional MRI neurofeedback training on connectivity between two regions induces long-lasting changes in intrinsic functional network. Front. Hum. Neurosci. 2015, 9, 160. [Google Scholar] [CrossRef] [Green Version]
- Engelbregt, H.J.; Keeser, D.; Van Eijk, L.; Suiker, E.M.; Eichhorn, D.; Karch, S.; Deijen, J.B.; Pogarell, O. Short and long-term effects of sham-controlled prefrontal EEG-neurofeedback training in healthy subjects. Clin. Neurophysiol. 2016, 127, 1931–1937. [Google Scholar] [CrossRef]
- Lubar, J.F. Neurofeedback for the management of attention-deficit/hyperactivity disorders. In Biofeedback: A Practitioners Guide; Schwartz, M., Andrasik, F., Eds.; Guilford Publications, Inc.: New York, NY, USA, 2003; pp. 409–437. [Google Scholar]
- Monastra, V.J. Overcoming the barriers to effective treatment for attention-deficit/hyperactivity disorder: A neuro-educational approach. Int. J. Psychophysiol. 2005, 58, 71–80. [Google Scholar] [CrossRef]
- Haegens, S.; Cousijn, H.; Wallis, G.; Harrison, P.J.; Nobre, A.C. Inter-and intra-individual variability in alpha peak frequency. Neuroimage 2014, 92, 46–55. [Google Scholar] [CrossRef] [Green Version]
- Wahnoun, R.; He, J.; Tillery, S.I.H. Selection and parameterization of cortical neurons for neuroprosthetic control. J. Neural Eng. 2006, 3, 162. [Google Scholar] [CrossRef]
- Hochberg, L.R.; Serruya, M.D.; Friehs, G.M.; Muk, J.A.; Saleh, M.; Caplan, A.H.; Branner, A.; Chen, D.; Penn, R.D.; Donoghue, J.P. Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature 2006, 442, 164–171. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Maedono, S.; Yu, Y.; Liu, C.; Ueda, N.; Li, P.; Zhu, C. Exploring Neurofeedback Training for BMI Power Augmentation of Upper Limbs: A Pilot Study. Entropy 2021, 23, 443. https://doi.org/10.3390/e23040443
Liang H, Maedono S, Yu Y, Liu C, Ueda N, Li P, Zhu C. Exploring Neurofeedback Training for BMI Power Augmentation of Upper Limbs: A Pilot Study. Entropy. 2021; 23(4):443. https://doi.org/10.3390/e23040443
Chicago/Turabian StyleLiang, Hongbo, Shota Maedono, Yingxin Yu, Chang Liu, Naoya Ueda, Peirang Li, and Chi Zhu. 2021. "Exploring Neurofeedback Training for BMI Power Augmentation of Upper Limbs: A Pilot Study" Entropy 23, no. 4: 443. https://doi.org/10.3390/e23040443
APA StyleLiang, H., Maedono, S., Yu, Y., Liu, C., Ueda, N., Li, P., & Zhu, C. (2021). Exploring Neurofeedback Training for BMI Power Augmentation of Upper Limbs: A Pilot Study. Entropy, 23(4), 443. https://doi.org/10.3390/e23040443