
Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
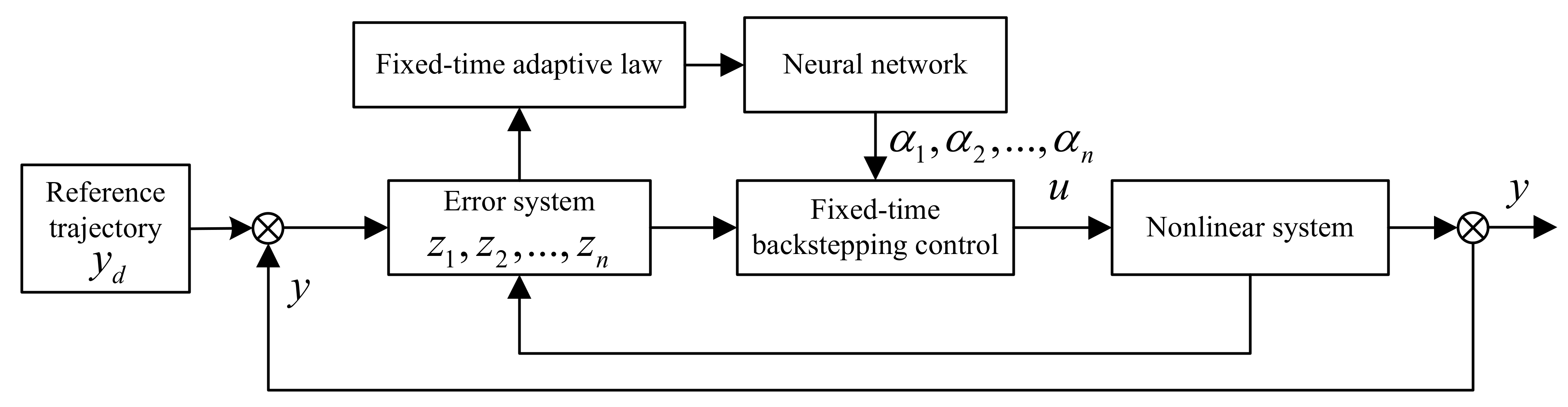
- The combination of the neural network adaptive control with fixed-time Lyapunov stability theory for high-order nonlinear system control problems.
- (2)
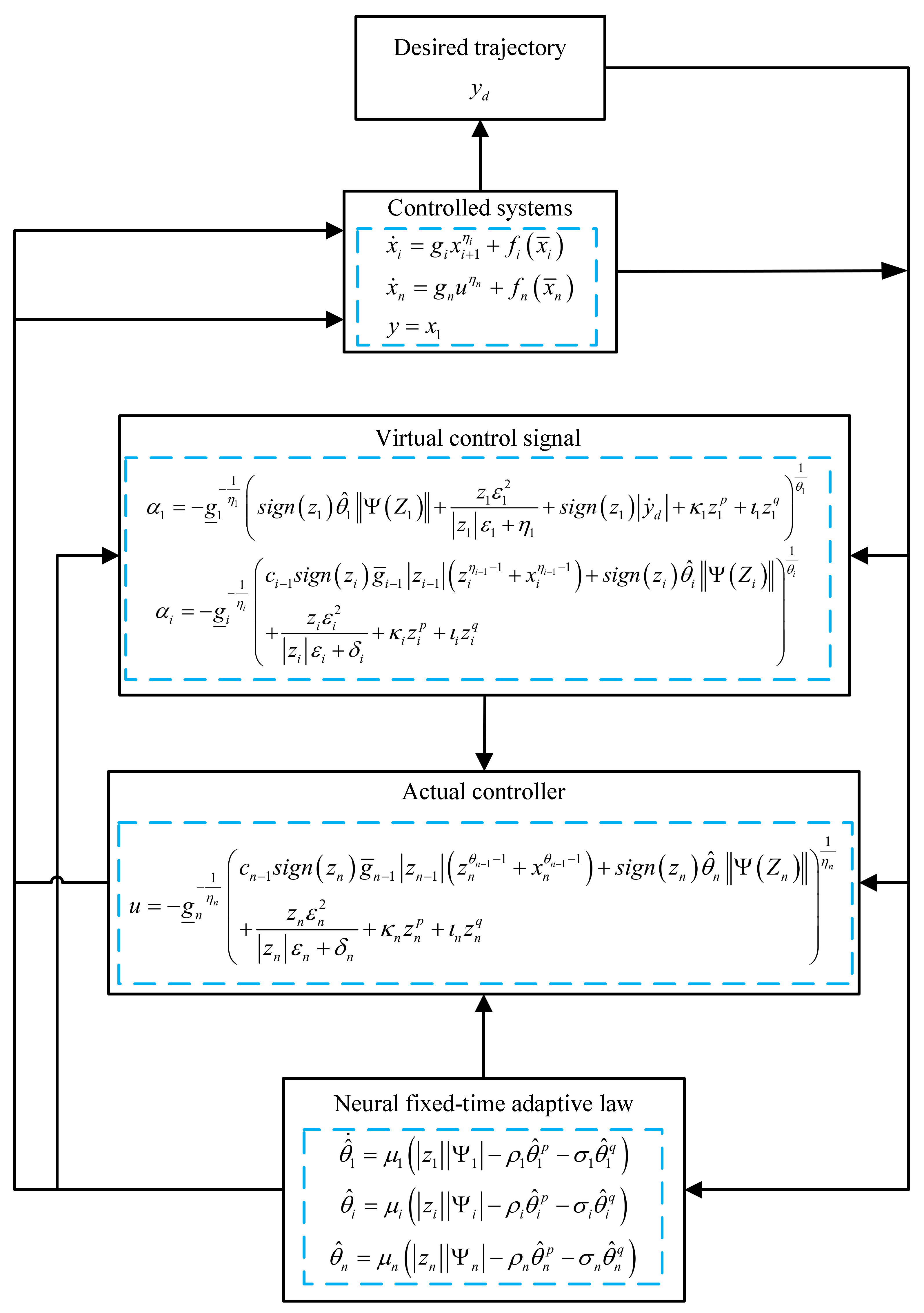
- The design of the fixed-time adaptive law of the error systems for neural networks. The parameters of neural networks are iteratively in fixed time based on the Lyapunov fixed-time stability theorem.
- (3)
- The convergence time set by control parameters and adaptive law gain parameters without initial conditions to ensure the control performance.
2. Problem Formation and Preliminaries
3. Main Results

4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Utkin, V.I. Sliding Mode Control Design Principles and Applications to Electric Drives. IEEE Trans. Ind. Electron. 2002, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wang, Y.; Yao, D.; Lu, R. A Sliding Mode Approach to Stabilization of Nonlinear Markovian Jump Singularly Perturbed Systems—ScienceDirect. Automatica 2018, 97, 404–413. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation. IFAC Proc. Vol. 2006, 39, 149–154. [Google Scholar] [CrossRef]
- Niu, B.; Duan, P.; Li, J.; Li, X. Adaptive Neural Tracking Control Scheme of Switched Stochastic Nonlinear Pure-Feedback Nonlower Triangular Systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 975–986. [Google Scholar] [CrossRef]
- Li, X.; Cheah, C.C. Adaptive Neural Network Control of Robot Based on a Unified Objective Bound. IEEE Trans. Control Syst. Technol. 2014, 22, 1032–1043. [Google Scholar] [CrossRef]
- Dai, S.L.; Wang, C.; Wang, M. Dynamic learning from adaptive neural network control of a class of nonaffine nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 111–123. [Google Scholar]
- Park, J.; Kim, S.; Park, T. Output-Feedback Adaptive Neural Controller for Uncertain Pure-Feedback Nonlinear Systems Using a High-Order Sliding Mode Observer. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1596–1601. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, C. Adaptive NN control of uncertain nonlinear pure-feedback systems. Automatica 2002, 38, 671–682. [Google Scholar] [CrossRef]
- Zhao, Q.; Lin, Y. Adaptive dynamic surface control for pure-feedback systems. Int. J. Robust Nonlinear Control 2012, 22, 1647–1660. [Google Scholar] [CrossRef]
- Na, J.; Ren, X.; Zheng, D. Adaptive control. for nonlinear pure-feedback systems with high-order sliding mode observer. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 370–382. [Google Scholar]
- Sun, G.; Wang, D.; Peng, Z. Adaptive control based on single neural network approximation for non-linear pure-feedback systems. IET Control Theory Appl. 2012, 6, 2387–2396. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Lin, C.; Sun, Y. Observer-based adaptive neural control for a class of nonlinear pure-feedback systems. Neurocomputing 2015, 171, 1517–1523. [Google Scholar] [CrossRef]
- Wang, H.; Liu, P.X.; Bao, J.; Xie, X.J.; Li, S. Adaptive neural output-feedback decentralized control for large-scale nonlinear systems with stochastic disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 972–983. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhao, S.; Li, H.; Lu, R.; Wu, C. Adaptive neural network tracking control. for robotic manipulators with dead zone. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3611–3620. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Y.; Chen, X.; Su, C.Y.; Li, Z.; Wang, C.; Peng, Y. Decentralized adaptive neural approximated inverse control for a class of large-scale nonlinear hysteretic systems with time delays. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2424–2437. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. Practical output tracking of nonlinear systems with uncontrollable unstable linearization. IEEE Trans. Autom. Control 2002, 47, 21–36. [Google Scholar] [CrossRef]
- Lin, W.; Pongvuthithum, R. Nonsmooth adaptive stabilization of cascade systems with nonlinear parameterization via partial-state feedback. IEEE Trans. Autom. Control 2003, 48, 1809–1816. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Liao, L. Consensus of High-Order Discrete-Time Multiagent Systems with Switching Topology. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 721–730. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Robust regulation of a chain of power integrators perturbed by a lower-triangular vector field. Int. J. Robust Nonlinear Control 2000, 10. [Google Scholar] [CrossRef]
- Zhao, X.; Shi, P.; Zheng, X.; Zhang, J. Intelligent tracking control for a class of uncertain high-order nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1976–1982. [Google Scholar] [CrossRef]
- Khandekar, A.A.; Malwatkar, G.M.; Patre, B.M. Discrete sliding mode control for robust tracking of higher order delay time systems with experimental application. ISA Trans. 2013, 52, 36–44. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y. Further results on global state feedback stabilization of high-order nonlinear systems with time-varying delays. ISA Trans. 2015, 55, 41–48. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Zhang, X.H.; Xie, X.J. Global continuous output-feedback stabilization for a class of high-order nonlinear systems with multiple time delays. J. Frankl. Inst. 2014, 351, 4334–4356. [Google Scholar] [CrossRef]
- Feng, S.S.; Sun, Z.Y.; Zhou, C.Q.; Chen, C.C.; Meng, Q. Output tracking control via neural networks for high-order stochastic nonlinear systems with dynamic uncertainties. Int. J. Fuzzy Syst. 2021, 23, 716–726. [Google Scholar] [CrossRef]
- Shahriari-Kahkeshi, M.; Afrush, A.; Pham, V.T. Adaptive consensus control of high-order uncertain nonlinear multi-agent systems with fuzzy dead-zone. Int. J. Fuzzy Syst. 2021, 23, 743–754. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Moradi, S. Robust adaptive dynamic surface back-stepping tracking control of high-order strict-feedback nonlinear systems via disturbance observer approach. Int. J. Control 2020, 17. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Qian, C.; Li, J. Global finite-time stabilization by output feedback for planar systems without observable linearization. IEEE Trans. Autom. Control 2005, 50, 885–890. [Google Scholar] [CrossRef]
- Ma, L.; Zong, G.; Zhao, X.; Huo, X. Observed-based adaptive finite-time tracking control for a class of nonstrict-feedback nonlinear systems with input saturation. J. Frankl. Inst. Eng. Appl. Math. 2020, 357, 11518–11544. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Tong, S. Adaptive Neural Network finite-time control for multi-input and multi-output nonlinear systems with positive powers of odd rational numbers. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2532–2543. [Google Scholar] [CrossRef] [PubMed]
- Na, J.; Wang, S.; Liu, Y.J.; Huang, Y.; Ren, X. Finite-time convergence adaptive neural network control for nonlinear servo systems. IEEE Trans. Cybern. 2020, 50, 2568–2579. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Wang, Z.; Chen, Y.; Sheng, W. Adaptive neural event-triggered control for discrete-time strict-feedback nonlinear systems. IEEE Trans. Cybern. 2020, 50, 2946–2958. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Zhang, M.; Ri, S.; Xiong, C.; Li, Z.; Kang, Y. High-order disturbance-observer-based sliding mode control for mobile wheeled inverted pendulum systems. IEEE Trans. Ind. Electron. 2020, 67, 2030–2041. [Google Scholar] [CrossRef]
- Fang, L.; Ma, L.; Ding, S.; Zhao, D. Finite-time stabilization for a class of high-order stochastic nonlinear systems with an output constraint. Appl. Math. Comput. 2019, 358, 63–79. [Google Scholar] [CrossRef]
- Xin, B.; Liu, L.; Hou, G.; Ma, Y. Chaos synchronization of nonlinear fractional discrete dynamical systems via linear control. Entropy 2017, 19, 351. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Zhu, Q.; Narayan, P.; Yue, A.; Yao, Y.; Deng, M. U-model-based two-degree-of-freedom internal model control of nonlinear dynamic systems. Entropy 2021, 23, 169. [Google Scholar] [CrossRef]
- Olvera-Guerrero, O.A.; Prieto-Guerrero, A.; Espinosa-Paredes, G. Non-linear stability analysis of real signals from nuclear power plants (boiling water reactors) based on noise assisted empirical mode decomposition variants and the shannon entropy. Entropy 2017, 19, 359. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Li, Y.; Fei, W. Neural network-based nonlinear fixed-time adaptive practical tracking control for quadrotor unmanned aerial vehicles. Complexity 2020, 2020, 13. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, J.; Ye, X.; Chin, C.S. Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems. Entropy 2021, 23, 963. https://doi.org/10.3390/e23080963
Li Y, Zhang J, Ye X, Chin CS. Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems. Entropy. 2021; 23(8):963. https://doi.org/10.3390/e23080963
Chicago/Turabian StyleLi, Yang, Jianhua Zhang, Xiaoyun Ye, and Cheng Siong Chin. 2021. "Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems" Entropy 23, no. 8: 963. https://doi.org/10.3390/e23080963
APA StyleLi, Y., Zhang, J., Ye, X., & Chin, C. S. (2021). Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems. Entropy, 23(8), 963. https://doi.org/10.3390/e23080963