
Discrete Phase Shifts of Intelligent Reflecting Surface Systems Considering Network Overhead




Abstract
:1. Introduction
- The practical achievable rate considering the pilot signal overhead and control signal overhead is modeled to evaluate the performance of the IRS systems adopting discrete phase shift methods.
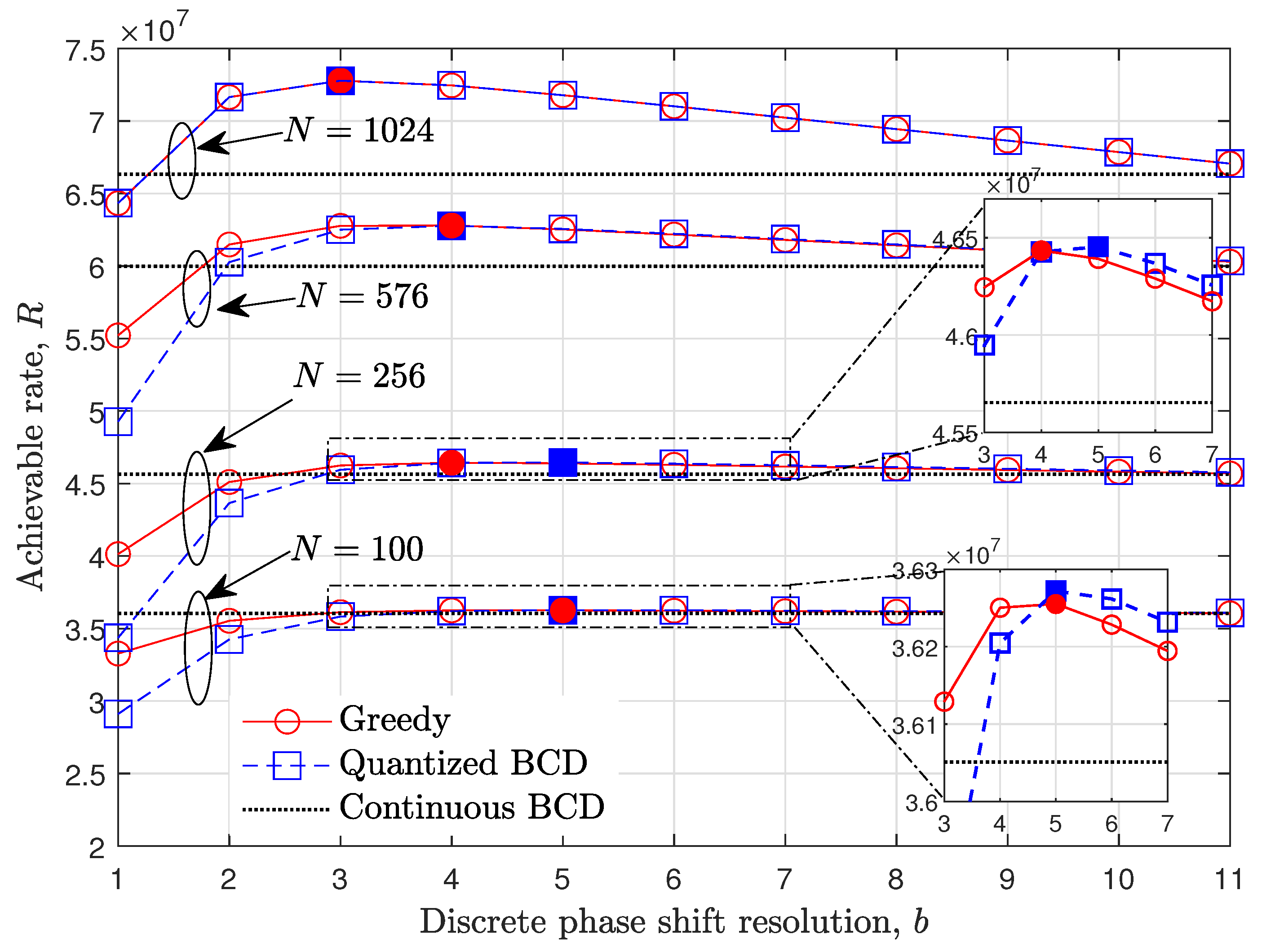
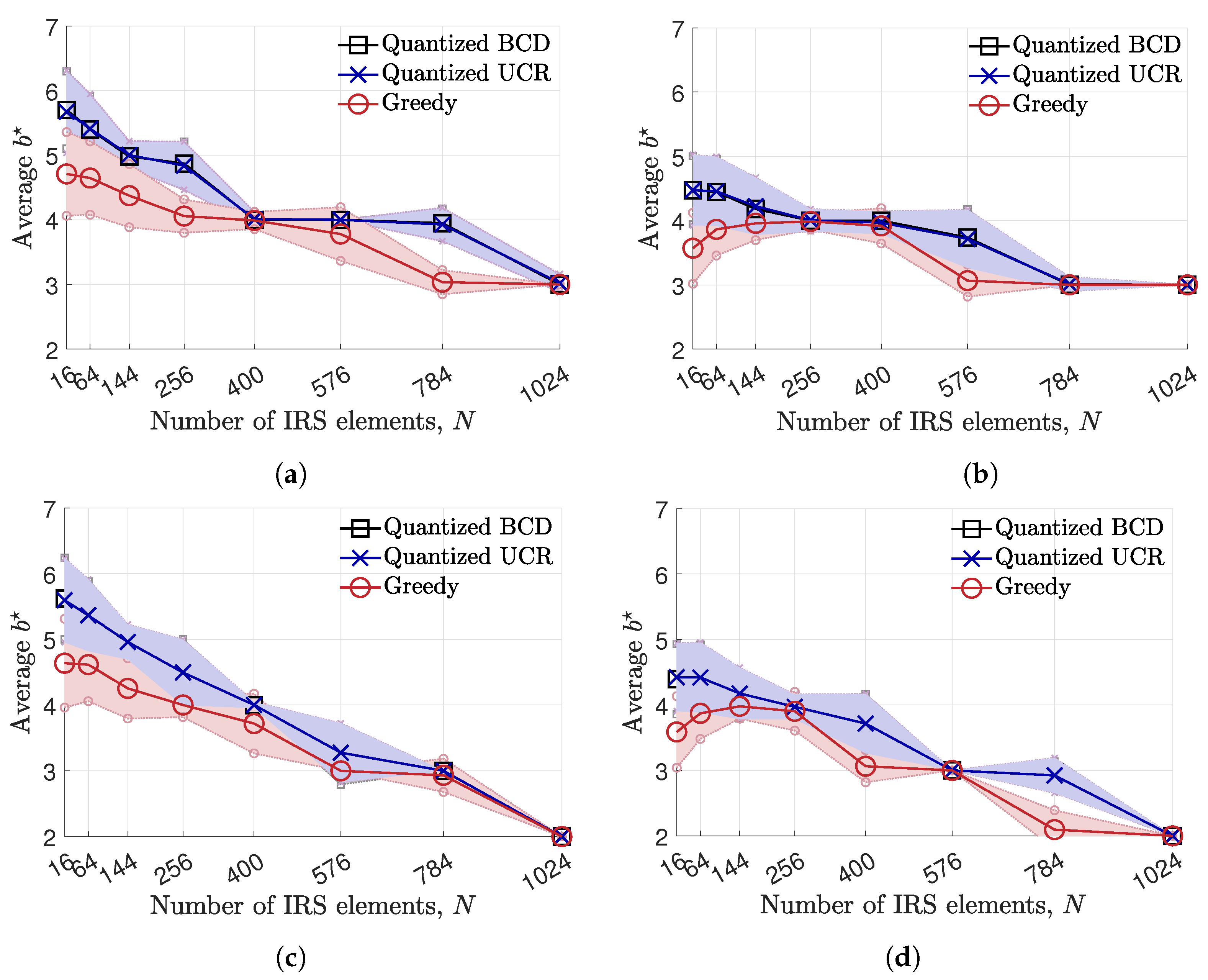
- The concavity of the achievable rate over the IRS phase shift resolution is numerically shown. Following the results, the incremental search algorithm is proposed to obtain the optimal discrete phase shift resolution that can maximize the achievable rate.
- In the fixed discrete phase shift resolution, two suboptimal algorithms to find the optimal discrete phase shift values, namely the greedy and BCD algorithms, are introduced. From the simulation results, some meaningful observations on these two sub-algorithms are verified as follows:Observation 1: When N is relatively small, the BCD algorithm achieves a higher achievable rate than the greedy algorithm in a low signal-to-noise ratio (SNR) regime.Observation 2: When N is sufficiently large and is small, the greedy algorithm outperforms the BCD algorithms in a high SNR regime.
- This study verifies the merit of the IRS discrete phase shift method for spatial diversity systems. Providing the optimal resolution of IRS discrete phase shift under various system configurations, our work provides a guideline to design the phase shift resolution of IRS-aided multiple-antenna systems.
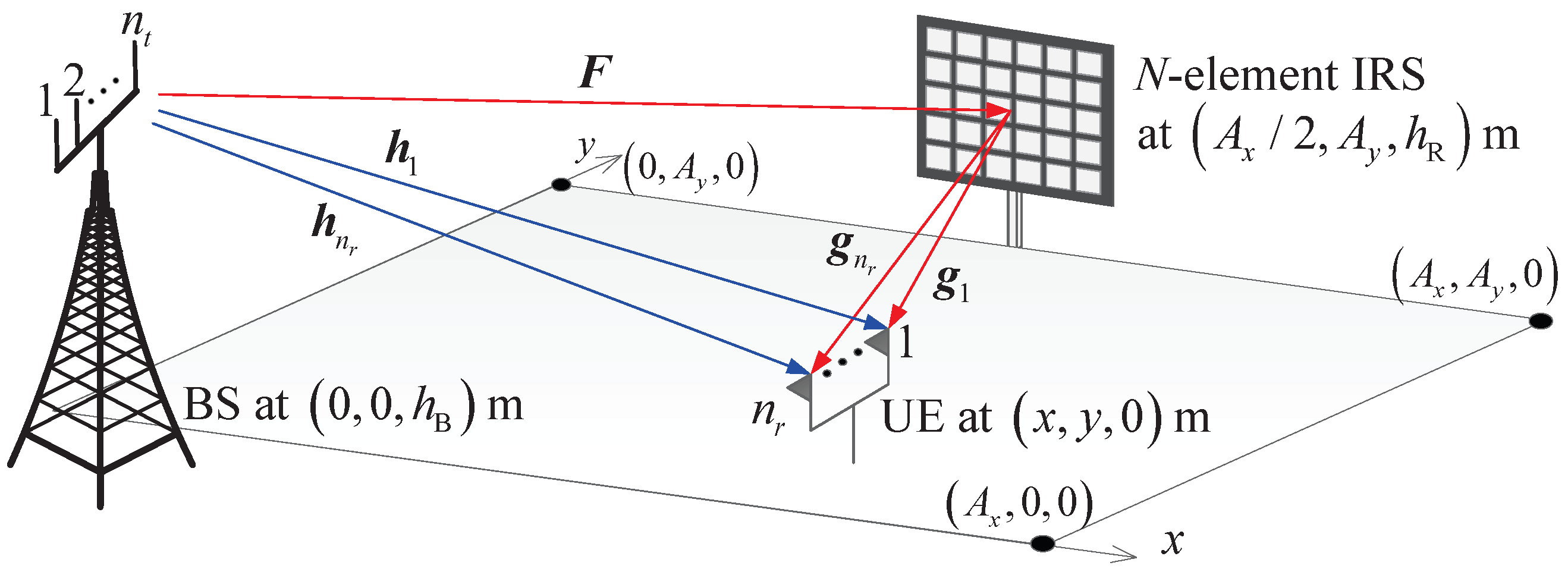
2. System Model
2.1. Channel Model
2.2. Signal Model
3. Achievable Rate Model for IRS-Aided Multiple-Antenna Systems
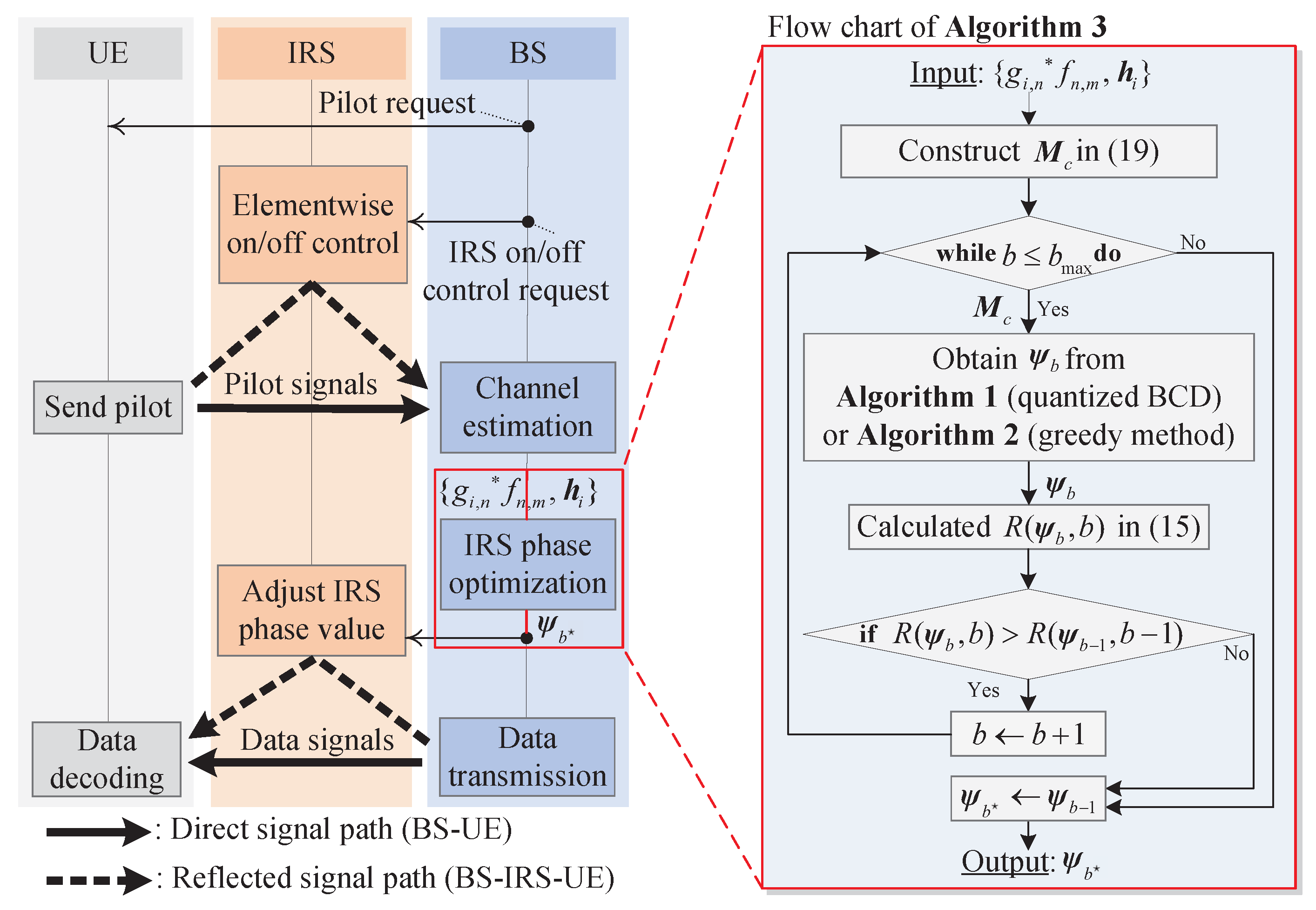
3.1. CSI Acquisition Scenario
- Step 1:
- The user sends pilot symbols (training sequence) using the ith antenna while all IRS elements are turned off.
- Step 2:
- The BS estimates the direct channel .
- Step 3:
- The user sends pilot symbols (training sequence) using the ith antenna while the nth IRS element is turned on with and other IRS elements are turned off.
- Step 4:
- The BS estimates the indirect cascaded channel .
- Step 5:
- Repeat Steps 3 and 4 from to .
- Step 6:
- Repeat Steps 1–5 from to .
3.2. Network Overheads and Achievable Rate Models for Discrete Phase Shift IRS Systems
4. IRS Discrete Phase Shift Vector Design with Optimal Phase Shift Resolution
| Algorithm 1 Quantized BCD-Based IRS Discrete Phase Shift Algorithm. |
|
| Algorithm 2 Greedy-Based IRS Discrete Phase Shift Algorithm. |
|
5. Performance Evaluation and Discussion
| Algorithm 3 Incremental Search-Based Discrete Phase Shift Resolution Finding Algorithm. |
|
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AoA | Angle of arrival |
| AoD | Angle of departure |
| BCD | Block coordinate descent |
| BS | Base station |
| CSI | Channel state information |
| IRS | Intelligent reflecting surface |
| LoS | Line of sight |
| MISO | Multiple-input multiple-output |
| MRT | Maximum ratio transmission |
| NLoS | Non-line-of-sight |
| NOMA | Non-orthogonal multiple access |
| PIN | Positive–intrinsic–negative |
| SNR | Signal-to-noise ratio |
| STBC | Space–time block code |
| STLC | Space–time line code |
| UCR | Unit-modulus constraint |
| UE | User equipment |
References
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.C. Toward smart wireless communications via intelligent reflecting surfaces: A contemporary survey. IEEE Commun. Surv. Tut. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Wang, K.; Kolb, J.F.; Elkashlan, M.; Chen, M.; Di Renzo, M.; Hao, Y.; Wang, J.; Swindlehurst, A.L.; et al. Reconfigurable intelligent surfaces for 6G systems: Principles, applications, and research directions. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Mu, X.; Hou, T.; Xu, J.; Di Renzo, M.; Al-Dhahir, N. Reconfigurable intelligent surfaces: Principles and opportunities. IEEE Commun. Surv. Tuts. 2021, 23, 1546–1577. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent reflecting surface-aided wireless communications: A tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Liang, Y.C.; Pei, Y.; Guo, H. Intelligent reflecting surface: A programmable wireless environment for physical layer security. IEEE Access 2019, 7, 82599–82612. [Google Scholar] [CrossRef]
- Wijewardena, M.; Samarasinghe, T.; Hemachandra, K.T.; Atapattu, S.; Evans, J.S. Physical layer security for intelligent reflecting surface assisted two-way communications. IEEE Commun. Lett. 2021, 25, 2156–2160. [Google Scholar] [CrossRef]
- Guan, X.; Wu, Q.; Zhang, R. Intelligent reflecting surface assisted secrecy communication: Is artificial noise helpful or not? IEEE Wirel. Commun. Lett. 2020, 9, 778–782. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Xu, J.; Liu, Y.F. Max-min fairness in IRS-aided multi-cell MISO systems with joint transmit and reflective beamforming. IEEE Trans. Wirel. Commun. 2021, 20, 1379–1393. [Google Scholar] [CrossRef]
- Han, H.; Zhao, J.; Zhai, W.; Xiong, Z.; Niyato, D.; Di Renzo, M.; Pham, Q.V.; Lu, W.; Lam, K.Y. Reconfigurable intelligent surface aided power control for physical-layer broadcasting. IEEE Trans. Commun. 2021, 69, 7821–7836. [Google Scholar] [CrossRef]
- Yang, G.; Xu, X.; Liang, Y.C.; Renzo, M.D. Reconfigurable intelligent surface-assisted non-orthogonal multiple access. IEEE Trans. Wirel. Commun. 2021, 20, 3137–3151. [Google Scholar] [CrossRef]
- Zheng, B.; Wu, Q.; Zhang, R. Intelligent reflecting surface-assisted multiple access With user pairing: NOMA or OMA? IEEE Commun. Lett. 2020, 24, 753–757. [Google Scholar] [CrossRef] [Green Version]
- Ding, Z.; Vincent Poor, H. A simple design of IRS-NOMA transmission. IEEE Commun. Lett. 2020, 24, 1119–1123. [Google Scholar] [CrossRef] [Green Version]
- Zhou, G.; Pan, C.; Ren, H.; Wang, K.; Nallanathan, A. Intelligent reflecting surface aided multigroup multicast MISO communication systems. IEEE Trans. Signal Process. 2020, 68, 3236–3251. [Google Scholar] [CrossRef] [Green Version]
- Gopi, S.; Kalyani, S.; Hanzo, L. Intelligent reflecting surface assisted beam index-modulation for millimeter wave communication. IEEE Trans. Wirel. Commun. 2021, 20, 983–996. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Yuan, X.; Chen, Z.; Li, H. Intelligent reflecting surface-assisted millimeter wave communications: Joint active and passive precoding design. IEEE Trans. Veh. Technol. 2020, 69, 14960–14973. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable intelligent surfaces for energy efficiency in wireless communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef] [Green Version]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Jeong, H.; Park, E.; Phon, R.; Lim, S. Mechatronic reconfigurable intelligent-surface-driven indoor fifth-generation wireless communication. Adv. Intell. Syst. 2002. early access articles. [Google Scholar] [CrossRef]
- Han, Y.; Tang, W.; Jin, S.; Wen, C.K.; Ma, X. Large intelligent surface-assisted wireless communication exploiting statistical CSI. IEEE Trans. Veh. Technol. 2019, 68, 8238–8242. [Google Scholar] [CrossRef]
- Liang, Y.C.; Long, R.; Zhang, Q.; Chen, J.; Cheng, H.V.; Guo, H. Large intelligent surface/antennas (LISA): Making reflective radios smart. J. Commun. Net. 2019, 4, 40–50. [Google Scholar] [CrossRef]
- Bariah, L.; Muhaidat, S.; Sofotasios, P.C.; Bouanani, F.E.; Dobre, O.A.; Hamouda, W. Large intelligent surface-assisted nonorthogonal multiple access for 6G networks: Performance analysis. IEEE Internet Things J. 2021, 8, 5129–5140. [Google Scholar] [CrossRef]
- Kundu, N.K.; Mckay, M.R. Large intelligent surfaces with channel estimation overhead: Achievable rate and optimal configuration. IEEE Wirel. Commun. Lett. 2021, 10, 986–990. [Google Scholar] [CrossRef]
- He, Z.Q.; Yuan, X. Cascaded channel estimation for large intelligent metasurface assisted massive MIMO. IEEE Wirel. Commun. Lett. 2020, 9, 210–214. [Google Scholar] [CrossRef] [Green Version]
- Tan, X.; Sun, Z.; Jornet, J.M.; Pados, D. Increasing indoor spectrum sharing capacity using smart reflect-array. In Proceedings of the IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Tan, X.; Sun, Z.; Koutsonikolas, D.; Jornet, J.M. Enabling indoor mobile millimeter-wave networks based on smart reflect-arrays. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 270–278. [Google Scholar] [CrossRef]
- Liaskos, C.; Tsioliaridou, A.; Pitsillides, A.; Akyildiz, I.F.; Kantartzis, N.V.; Lalas, A.X.; Dimitropoulos, X.; Ioannidis, S.; Kafesaki, M.; Soukoulis, C. Design and development of software defined metamaterials for nanonetworks. IEEE Circuits Syst. Mag. 2015, 15, 12–25. [Google Scholar] [CrossRef]
- Liaskos, C.; Tsioliaridou, A.; Nie, S.; Pitsillides, A.; Ioannidis, S.; Akyildiz, I. An interpretable neural network for configuring programmable wireless environments. In Proceedings of the IEEE 20th Internet Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Cannes, France, 2–5 July 2019; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Mishra, D.; Johansson, H. Channel estimation and low-complexity beamforming design for passive intelligent surface assisted MISO wireless energy transfer. In Proceedings of the ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 4659–4663. [Google Scholar] [CrossRef]
- Mishra, D.; Larsson, E.G. Passive intelligent surface assisted MIMO powered sustainable IoT. In Proceedings of the 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 8961–8965. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Debbah, M.; Yuen, C. Achievable rate maximization by passive intelligent mirrors. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 3714–3718. [Google Scholar] [CrossRef] [Green Version]
- Cui, T.J.; Qi, M.Q.; Wan, X.; Zhao, J.; Cheng, Q. Coding metamaterials, digital metamaterials and programmable metamaterials digital metamaterials and programmable metamaterials. Light Sci. Appl. 2014, 3, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Chen, X.Q.; Liu, S.; Zhang, Q.; Zhao, J.; Dai, J.Y.; Bai, G.D.; Wan, X.; Cheng, Q.; Castaldi, G.; et al. Coding metamaterials, digital metamaterials and programmable metamaterials. Nat. Commun. 2018, 8, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Liang, Y.C.; Chen, J.; Larsson, E.G. Weighted sum-rate maximization for reconfigurable intelligent surface aided wireless networks. IEEE Trans. Wirel. Commun. 2020, 19, 3064–3076. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Ding, W.; Kai, C.; Yi, Y.; Huang, Y. Joint placement and beamforming design for IRS-enhanced multiuser MISO systems. IEEE Trans. Commun. 2022, 70, 6678–6692. [Google Scholar] [CrossRef]
- Ma, H.; Zhang, H.; Zhu, Y.; Qian, Y. Wireless powered intelligent reflecting surface for improving broadcasting channels. IEEE Trans. Wirel. Commun. 2022. early access articles. [Google Scholar] [CrossRef]
- Perović, N.S.; Renzo, M.D.; Flanagan, M.F. Channel capacity optimization using reconfigurable intelligent surfaces in indoor mmWave environments. In Proceedings of the ICC 2020 –2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–7. [Google Scholar]
- Zhang, Q.; Liang, Y.C.; Poor, H.V. Reconfigurable intelligent surface assisted MIMO symbiotic radio networks. arXiv 2020, arXiv:2002.00340. [Google Scholar] [CrossRef]
- Yuan, J.; Liang, Y.C.; Joung, J.; Feng, G.; Larsson, E.G. Intelligent reflecting surface-assisted cognitive radio system. IEEE Trans. Commun. 2021, 69, 675–687. [Google Scholar] [CrossRef]
- Björnson, E.; Özdogan, Ö.; Larsson, E.G. Reconfigurable intelligent surfaces: Three myths and two critical questions. IEEE Commun. Mag. 2020, 58, 90–96. [Google Scholar] [CrossRef]
- Zappone, A.; Di Renzo, M.; Shams, F.; Qian, X.; Debbah, M. Overhead-aware design of reconfigurable intelligent surfaces in smart radio environments. IEEE Trans. Wirel. Commun. 2021, 20, 126–141. [Google Scholar] [CrossRef]
- Yang, H.; Yang, F.; Xu, S.; Mao, Y.; Li, M.; Cao, X.; Gao, J. A 1-Bit 10×10 Reconfigurable reflectarray antenna: Design, optimization, and experiment. IEEE Trans. Antennas Propag. 2016, 64, 2246–2254. [Google Scholar] [CrossRef]
- Jia, S.; Yuan, X.; Liang, Y.C. Reconfigurable intelligent surfaces for energy efficiency in D2D communication network. IEEE Wirel. Commun. Lett. 2021, 10, 683–687. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Beamforming optimization for wireless network aided by intelligent reflecting surface with discrete phase shifts. IEEE Trans. Commun. 2020, 68, 1838–1851. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Di, B.; Song, L.; Han, Z. Reconfigurable intelligent surfaces assisted communications with limited phase shifts: How many phase shifts are enough? IEEE Trans. Veh. Technol. 2020, 69, 4498–4502. [Google Scholar] [CrossRef] [Green Version]
- You, C.; Zheng, B.; Zhang, R. Channel estimation and passive beamforming for intelligent reflecting surface: Discrete phase shift and progressive refinement. IEEE J. Sel. Areas Commun. 2020, 38, 2604–2620. [Google Scholar] [CrossRef]
- Chen, J.C. Beamforming optimization for intelligent reflecting surface-aided MISO communication systems. IEEE Trans. Veh. Technol. 2021, 70, 504–513. [Google Scholar] [CrossRef]
- An, J.; Gan, L. The low-complexity design and optimal training overhead for IRS-assisted MISO systems. IEEE Wirel. Commun. Lett. 2021, 10, 1820–1824. [Google Scholar] [CrossRef]
- Peng, Z.; Li, T.; Pan, C.; Ren, H.; Wang, J. RIS-aided D2D communications relying on statistical CSI with imperfect hardware. IEEE Commun. Lett. 2022, 26, 473–477. [Google Scholar] [CrossRef]
- Xie, X.; He, C.; Luan, H.; Dong, Y.; Yang, K.; Gao, F.; Wang, Z.J. A joint optimization framework for IRS-assisted energy self-sustainable IoT networks. IEEE Internet Things J. 2022, 9, 13767–13779. [Google Scholar] [CrossRef]
- Niu, H.; Lin, Z.; Chu, Z.; Zhu, Z.; Xiao, P.; Nguyen, H.X.; Lee, I.; Al-Dhahir, N. Joint beamforming design for secure RIS-assisted IoT networks. IEEE Internet Things J. 2022. early access articles. [Google Scholar] [CrossRef]
- Chen, J.; Xie, Y.; Mu, X.; Jia, J.; Liu, Y.; Wang, X. Energy efficient resource allocation for IRS assisted CoMP systems. IEEE Trans. Wirel. Commun. 2022, 21, 5688–5702. [Google Scholar] [CrossRef]
- Yan, W.; Sun, G.; Hao, W.; Zhu, Z.; Chu, Z.; Xiao, P. Machine learning-based beamforming design for millimeter wave IRS communications with discrete phase shifters. IEEE Wirel. Commun. Lett. 2022. early access articles. [Google Scholar] [CrossRef]
- Chen, J.; Guo, L.; Jia, J.; Shang, J.; Wang, X. Resource allocation for IRS assisted SGF NOMA transmission: A MADRL approach. IEEE J. Sel. Areas Commun. 2022, 40, 1302–1316. [Google Scholar] [CrossRef]
- Sun, Z.; Jing, Y. On the performance of multi-antenna IRS-assisted NOMA networks with continuous and discrete IRS phase shifting. IEEE Trans. Wirel. Commun. 2022, 21, 3012–3023. [Google Scholar] [CrossRef]
- Li, H.; Cai, W.; Liu, Y.; Li, M.; Liu, Q.; Wu, Q. Intelligent reflecting surface enhanced wideband MIMO-OFDM communications: From practical model to reflection optimization. IEEE Trans. Commun. 2021, 69, 4807–4820. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Liang, Y.C.; Joung, J.; Yuan, X.; Wang, X. Joint beamforming and reconfigurable intelligent surface design for two-way relay networks. IEEE Trans. Commun. 2021, 69, 5620–5633. [Google Scholar] [CrossRef]
- Li, S.; Smith, P.J.; Dmochowski, P.A.; Yin, J. Analysis of analog and digital MRC in massive MU-MIMO systems over correlated channels. J. Commun. Netw. 2021, 6, 454–462. [Google Scholar] [CrossRef]
- Kermani, V.M.; Kermani, H.M.; Morsali, A. Coding advantage optimization of space-time-frequency block codes. J. Commun. Netw. 2020, 2, 85–92. [Google Scholar] [CrossRef]
- Joung, J. Space–time line code. IEEE Access 2018, 6, 1023–1041. [Google Scholar] [CrossRef]
- Joung, J. Space–time line code for massive MIMO and multiuser systems with antenna allocation. IEEE Access 2018, 6, 962–979. [Google Scholar] [CrossRef]
- Joung, J.; Fan, J. Linear precoding for space–time line code-based multicast systems. IEEE Trans. Veh. Technol. 2022, 71, 12386–12391. [Google Scholar] [CrossRef]
- Joung, J.; Choi, J. Space–time line codes with power allocation for regenerative two-way relay systems. IEEE Trans. Veh. Technol. 2019, 68, 4884–4893. [Google Scholar] [CrossRef]
- Wu, C.; Xiao, Y.; Guan, Y.L.; Wang, J.; Li, X.; Yang, P. Space–time/frequency line coded OFDM: System design and practical implementation. IEEE Access 2019, 7, 151915–151928. [Google Scholar] [CrossRef]
- Yu, H.; Joung, J. Frame structure design for vehicular-to-roadside unit communications using space–time line code under time-varying channels. IEEE Syst. J. 2021, 15, 3150–3153. [Google Scholar] [CrossRef]
- Joung, J.; Yu, H.; Zhao, J. Bandwidth design for energy-efficient unmanned aerial vehicle using space–time line code. IEEE Syst. J. 2021, 15, 3154–3157. [Google Scholar] [CrossRef]
- Joung, J.; Choi, J.; Jung, B.C.; Yu, S. Artificial noise injection and its power loading methods for secure space–time line coded systems. Entropy 2019, 21, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Joung, J.; Fan, J. Over-the-air computation strategy using space–time line code for data collection by multiple unmanned aerial vehicles. IEEE Access 2021, 9, 105230–105241. [Google Scholar] [CrossRef]
- Pang, Y.; Xiao, X.; Lei, X.; Li, Y. Performance analysis and antenna selection for space time line code. IEEE Access 2020, 8, 193503–193511. [Google Scholar] [CrossRef]
- Lim, S.C.; Joung, J. Transmit antenna selection for space–time line code systems. IEEE Trans. Commun. 2021, 69, 786–798. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yuen, C.; Zhang, Z.; Debbah, M. Channel estimation for RIS-empowered multi-user MISO wireless communications. IEEE Trans. Commun. 2021, 69, 4144–4157. [Google Scholar] [CrossRef]
- Zheng, B.; You, C.; Mei, W.; Zhang, R. A survey on channel estimation and practical passive beamforming design for intelligent reflecting surface aided wireless communications. IEEE Commun. Surv. Tut. 2022, 24, 1035–1071. [Google Scholar] [CrossRef]
- Noh, S.; Lee, J.; Lee, G.; Seo, K.; Sung, Y.; Yu, H. Channel estimation techniques for RIS-assisted communication: Millimeter-wave and sub-THz systems. IEEE Veh. Technol. Mag. 2022, 17, 64–73. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, L.; Cui, S. Channel estimation for intelligent reflecting surface assisted multiuser communications: Framework, algorithms, and analysis. IEEE Trans. Wirel. Commun. 2020, 19, 6607–6620. [Google Scholar] [CrossRef]
- Jensen, T.L.; De Carvalho, E. An optimal channel estimation scheme for intelligent reflecting surfaces based on a minimum variance unbiased estimator. In Proceedings of the 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 5000–5004. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Qi, C.; Li, P.; Lu, P. Channel estimation for reconfigurable intelligent surface aided massive MIMO system. In Proceedings of the IEEE Signal Processing Advances in Wireless Communications (SPAWC), Atlanta, GA, USA, 26–29 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Hu, C.; Dai, L.; Han, S.; Wang, X. Two-timescale channel estimation for reconfigurable intelligent surface aided wireless communications. IEEE Trans. Commun. 2021, 69, 7736–7747. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Kim, J.; Joung, J.; Lim, K. Intelligent reflecting surface-aided space–time line coded systems. IEEE Wirel. Commun. Lett. 2022, 11, 245–249. [Google Scholar] [CrossRef]
- Kim, J.; Choi, J.; Joung, J.; Liang, Y.C. Modified block coordinate descent method for intelligent reflecting surface-aided space–time line coded systems. IEEE Wirel. Commun. Lett. 2022, 11, 1820–1824. [Google Scholar] [CrossRef]
- Hu, X.; Zhong, C.; Zhang, Y.; Chen, X.; Zhang, Z. Location information aided multiple intelligent reflecting surface systems. IEEE Trans. Commun. 2020, 68, 7948–7962. [Google Scholar] [CrossRef]
- Further Advancements for E-UTRA Physical Layer Aspects (Release 9), Technical Report TS 36.814; 3GPP, 2010.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Coverage area | |
| BS/IRS locations | |
| UE location | , where and |
| Azimuth angles for BS and UE | , |
| Azimuth angles for IRS | , |
| Elevation angles for IRS | , |
| Number of IRS elements | |
| Bandwidth/carrier frequency [83] | / |
| Antenna (IRS element) spacing [82] | Half wavelength, i.e., |
| Downlink duration/pilot overhead parameter | / |
| Rician factor [58] | |
| Noise Figure [58] | |
| Antenna gain for BS/UE [58] | / |
| Pathloss for Rician [83] | |
| Pathloss for Rayleigh [83] | |
| Computer/simulator | -GHz CPU and 32-GB RAM / MATLAB-2021a |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Yu, H.; Kang , X.; Joung , J. Discrete Phase Shifts of Intelligent Reflecting Surface Systems Considering Network Overhead. Entropy 2022, 24, 1753. https://doi.org/10.3390/e24121753
Kim J, Yu H, Kang X, Joung J. Discrete Phase Shifts of Intelligent Reflecting Surface Systems Considering Network Overhead. Entropy. 2022; 24(12):1753. https://doi.org/10.3390/e24121753
Chicago/Turabian StyleKim, Jaehong, Heejung Yu, Xin Kang , and Jingon Joung . 2022. "Discrete Phase Shifts of Intelligent Reflecting Surface Systems Considering Network Overhead" Entropy 24, no. 12: 1753. https://doi.org/10.3390/e24121753
APA StyleKim, J., Yu, H., Kang , X., & Joung , J. (2022). Discrete Phase Shifts of Intelligent Reflecting Surface Systems Considering Network Overhead. Entropy, 24(12), 1753. https://doi.org/10.3390/e24121753