Optimal UAV Formation Tracking Control with Dynamic Leading Velocity and Network-Induced Delays




Abstract
:1. Introduction
- Based on the analysis of UAVs’ error dynamics, considering the high dynamic characteristics including both uncertain time-varying leader velocity and network-induced delays, the discrete-time UAV system model is presented. Then, the formation tracking optimization problem is formulated as a linear quadratic cost function.
- To alleviate the influence of dynamic features, a two-step optimal formation tracking control algorithm is proposed in near-equilibrium control cases. That is, the optimal control strategy determined by the current states of the UAVs and previous control signals can be obtained during the online step, while the corresponding control gain is derived during the offline step by using backward recursion.
- Additionally, it is found that the proposed optimal control algorithm can be extended to the general dynamic case when the leader has dynamic time-varying velocity. Finally, the angle deviations are investigated, and it is proved that the similar state dynamics as the general case can be derived, thus the principle of the proposed control strategy for the general dynamic case can be maintained.
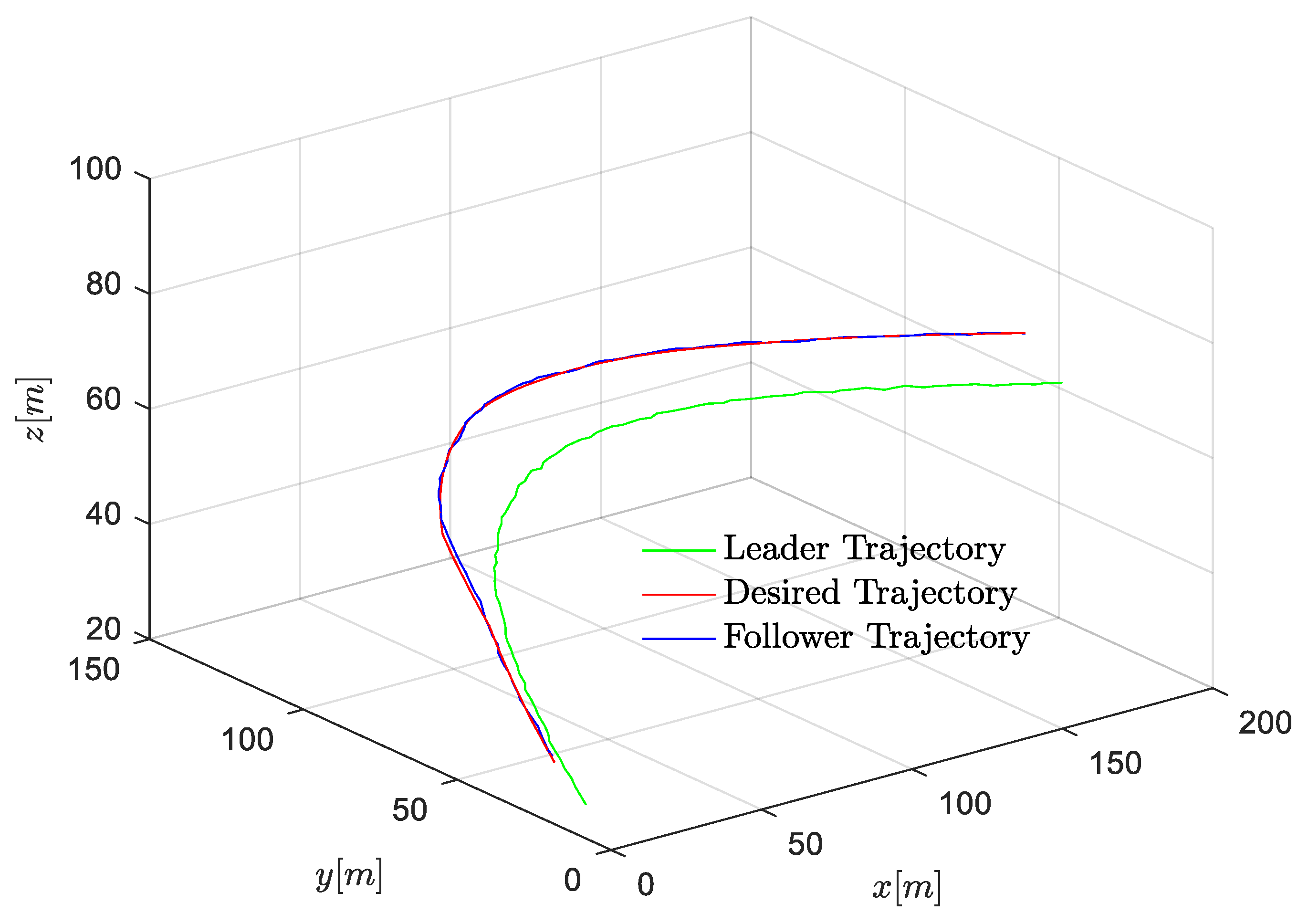
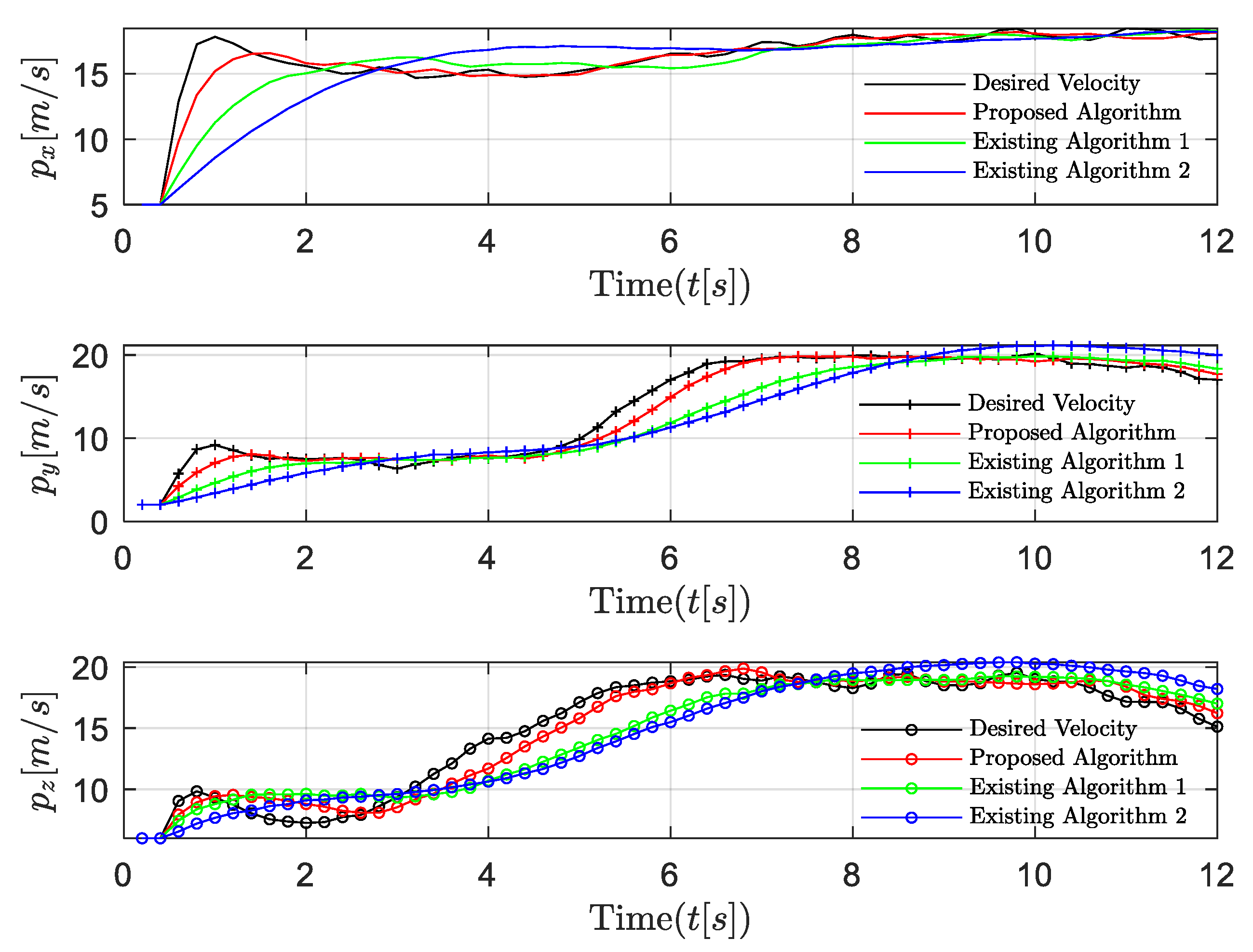
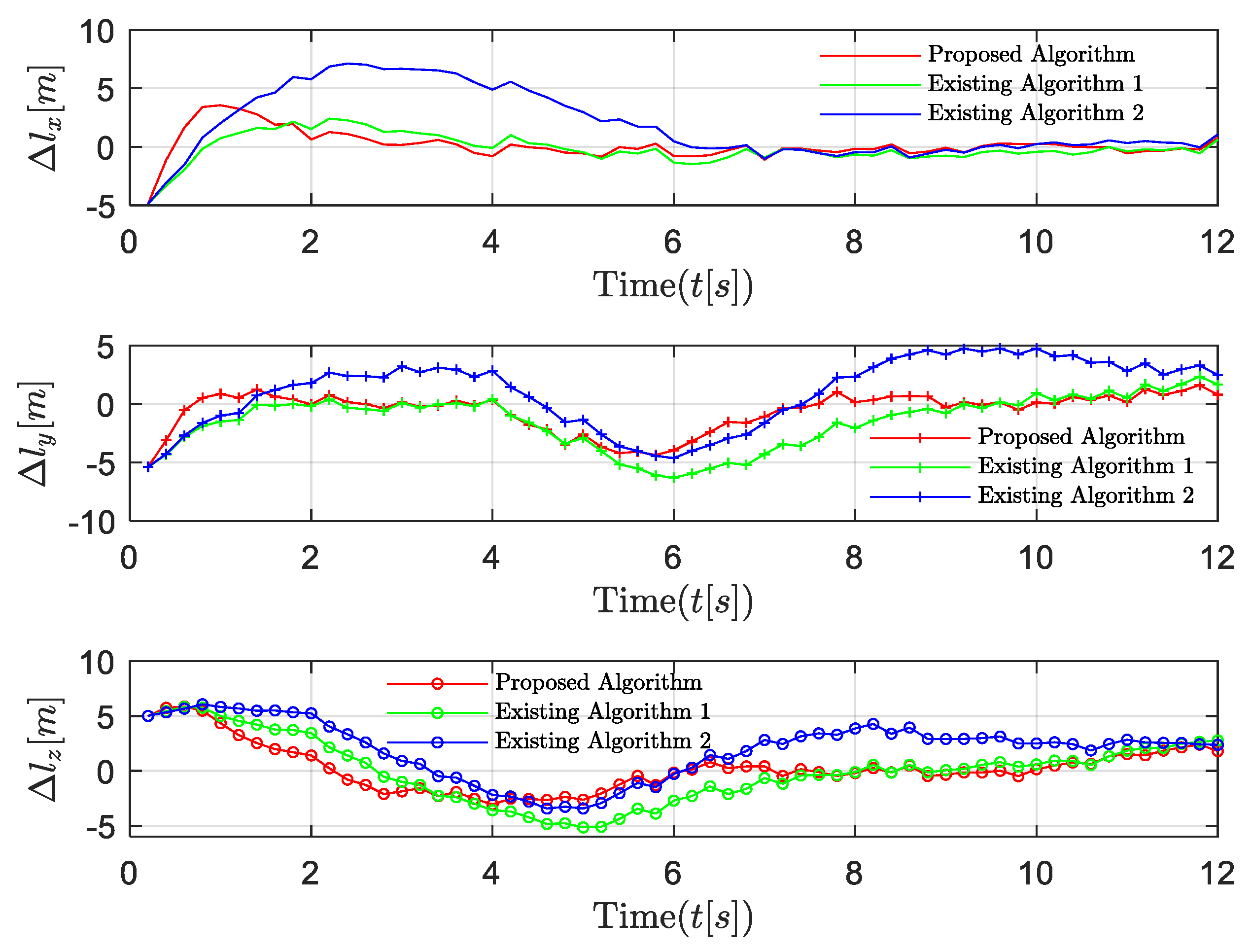
- Numerical experiment results based on real UAV flight data demonstrate that the proposed optimal UAV formation-tracking algorithm is applicable to general dynamic control cases in the presence of network-induced delays. In addition, compared with existing algorithms, faster convergence speed and better system stability are achieved.
2. Related Works
3. System Model and Problem Formulation
4. Formation Tracking Control Algorithm
4.1. Near-Equilibrium Control Strategy Design
4.2. General Dynamic Control Strategy Design
| Algorithm 1: Formation Tracking Control Design. |
| 1 Step 1: off-line |
| 2 Initialize |
| 3 for do |
| 4 Calculate by using |
| 5 |
| 6 Calculate by using |
| 7 |
| 8 end |
| 9 Step 2: On-line |
| 10 Initialize . |
| 11 for do |
| 12 Update and |
| 13 Calculate by using |
| 14 end |
4.3. Angle Deviation Analysis
5. Simulations and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, Y.; Fang, C.; Liu, L.; Zhou, H.; Zhang, H. Optimal control design for connected cruise control with stochastic communication delays. IEEE Trans. Veh. Technol. 2020, 69, 15357–15369. [Google Scholar] [CrossRef]
- Gu, J.; Su, T.; Wang, Q.; Du, X.; Guizani, M. Multiple moving targets surveillance based on a cooperative network for multi-UAV. IEEE Commun. Mag. 2018, 56, 82–89. [Google Scholar] [CrossRef]
- Pack, D.J.; DeLima, P.; Toussaint, G.J.; York, G. Cooperative control of UAVs for localization of intermittently emitting mobile targets. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2009, 39, 959–970. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y. Reinforcement learning in multiple-UAV networks: Deployment and movement design. IEEE Trans. Veh. Technol. 2019, 68, 8036–8049. [Google Scholar] [CrossRef] [Green Version]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Lin, Z.; Ding, W.; Yan, G.; Yu, C.; Giua, A. Leader–follower formation via complex Laplacian. Automatica 2013, 49, 1900–1906. [Google Scholar] [CrossRef]
- Wu, F.; Chen, J.; Liang, Y. Leader-follower formation control for quadrotors. IOP Conf. Ser. Mater. Sci. Eng. 2017, 187, 012016. [Google Scholar] [CrossRef] [Green Version]
- Ali, Q.; Montenegro, S. Explicit model following distributed control scheme for formation flying of mini-UAVs. IEEE Access 2016, 4, 397–406. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Liu, L.; Huang, M.; Zhang, Y. Decentralized feedback control for wireless sensor and actuator networks with multiple controllers. Int. J. Mach. Learn. Cybern. 2017, 8, 1471–1483. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.-S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Gao, Y.; Fang, C.; Liu, L.; Guo, S.; Li, P. Optimal connected cruise control with arbitrary communication delays. IEEE Syst. J. 2019, 14, 2913–2924. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, M.; Feng, Z.; Li, W.; Zhang, W.; Pan, M. IoT enabled UAV: Network architecture and routing algorithm. IEEE Internet Things J. 2019, 6, 3727–3742. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. Energy and delay aware task assignment mechanism for UAV-based IoT platform. IEEE Internet Things J. 2019, 6, 6523–6536. [Google Scholar] [CrossRef] [Green Version]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.C.; Schneckenburger, N. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Jia, Y. Consensus of a class of second-order multi-agent systems with time-delay and jointly-connected topologies. IEEE Trans. Autom. Control 2010, 55, 778–784. [Google Scholar]
- Zhu, W.; Jiang, Z.P. Event-based leader-following consensus of multi-agent systems with input time delay. IEEE Trans. Autom. Control 2014, 60, 1362–1367. [Google Scholar] [CrossRef]
- Li, X.; Chen, M.Z.Q.; Su, H.; Li, C. Consensus networks with switching topology and time-delays over finite fields. Automatica 2016, 68, 39–43. [Google Scholar] [CrossRef]
- Li, Y.; Li, H.; Ding, X.; Zhao, G. Leader–follower consensus of multiagent systems with time delays over finite fields. IEEE Trans. Cybern. 2018, 49, 3203–3208. [Google Scholar] [CrossRef]
- Chen, K.; Wang, J.; Zhang, Y.; Liu, Z. Leader-following consensus for a class of nonlinear strick-feedback multiagent systems with state time-delays. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 2351–2361. [Google Scholar] [CrossRef]
- Mei, J.; Ren, W.; Ma, G. Distributed coordinated tracking with a dynamic leader for multiple Euler-Lagrange systems. IEEE Trans. Autom. Control 2011, 56, 1415–1421. [Google Scholar] [CrossRef]
- Wang, J.; Xin, M. Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Trans. Control. Syst. Technol. 2012, 21, 1731–1744. [Google Scholar] [CrossRef]
- Shi, J.; Yue, D.; Xie, X. Optimal leader-follower consensus for constrained-input multiagent systems with completely unknown dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1182–1191. [Google Scholar] [CrossRef]
- Abdessameud, A.; Tayebi, A.; Polushin, I.G. Leader-follower synchronization of Euler-Lagrange systems with time-varying leader trajectory and constrained discrete-time communication. IEEE Trans. Autom. Control 2016, 62, 2539–2545. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Wang, X.; Lin, Z. Flocking of multi-agents with a virtual leader. IEEE Trans. Autom. Control 2009, 54, 293–307. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M. Adaptive leader–follower formation control of underactuated surface vessels under asymmetric range and bearing constraints. IEEE Trans. Veh. Technol. 2017, 67, 852–865. [Google Scholar] [CrossRef]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles: Theories and applications. IEEE Trans. Control. Syst. Technol. 2014, 23, 340–348. [Google Scholar] [CrossRef]
- Yazdani, S.; Su, H. A fully distributed protocol for flocking of time-varying linear systems with dynamic leader and external disturbance. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1234–1242. [Google Scholar] [CrossRef]
- Sun, Y.; Dong, D.; Qin, H.; Wang, N.; Li, X. Distributed coordinated tracking control for multiple uncertain Euler–Lagrange systems with time-varying communication delays. IEEE Access 2019, 7, 12598–12609. [Google Scholar] [CrossRef]
- Lara, D.; Sanchez, A.; Lozano, R.; Castillo, P. Real-time embedded control system for VTOL aircrafts: Application to stabilize a quad-rotor helicopter. In Proceedings of the IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 2553–2558. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Dynamic Leader Velocity | Delay | Approach | Result |
|---|---|---|---|---|
| [21] | No | Yes | Neighbor-based linear protocol with time-delay. | A sufficient condition is derived and time-delay cannot be arbitrarily large. |
| [22] | No | Yes | A piecewise constant and neighbor-based feedback control rule. | A necessary condition is presented and continuous communication between neighboring agents is avoided. |
| [24] | No | Yes | Finite-field leader–follower consensus protocol with time delays and switching topology. | Two criteria for the finite-field leader–follower consensus with time delays and switching topology are presented. |
| [25] | No | Yes | An adaptive leader–follower consensus control protocol with unknown nonlinearities and state time-delays. | The consensus tracking error will converge to an adjustable neighborhood of the origin. |
| [30] | No | No | Three flocking algorithms: two for free flocking and one for constrained flocking. | Migration of flocks can be performed using a peer-to-peer network of agents, i.e., “flocks need no leaders.” |
| [31] | Yes | No | Flocking of multi-agent protocol with a virtual leader. | Modification to the Olfati-Saber algorithm in [30]. |
| [33] | No | Yes | Consensus-based approaches are applied to achieve time-varying formation. | Necessary and sufficient conditions for UAV swarm systems to achieve time-varying formations are proposed. |
| [34] | Yes | No | A continuous adaptive controller is designed. | An adaptive estimator for each uninformed agent can estimate the velocity of the leader. |
| [35] | Yes | Yes | An adaptive leader–follower formation control protocol is proposed. | The overall closed-loop system is proved to be semi-globally, uniformly, and ultimately bounded by Lyapunov stability theory. |
| Parameter | Scenario 1 Near-Equilibrium Case | Scenario 2 General Dynamic Case |
|---|---|---|
| Sampling period | 0.4 s | 0.4 s |
| Network-induced delays | ||
| Desired velocity | Fixed m/s | Dynamic, average velocity: 15 m/s |
| Desired distance | Depend on velocity | Depend on velocity |
| Uncertainty | None | Disturbance distribution |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Xu, M.; Liu, L.; Fang, C.; Sun, Y.; Chen, H. Optimal UAV Formation Tracking Control with Dynamic Leading Velocity and Network-Induced Delays. Entropy 2022, 24, 305. https://doi.org/10.3390/e24020305
Wang Z, Xu M, Liu L, Fang C, Sun Y, Chen H. Optimal UAV Formation Tracking Control with Dynamic Leading Velocity and Network-Induced Delays. Entropy. 2022; 24(2):305. https://doi.org/10.3390/e24020305
Chicago/Turabian StyleWang, Zhuwei, Mengjiao Xu, Lihan Liu, Chao Fang, Yang Sun, and Huamin Chen. 2022. "Optimal UAV Formation Tracking Control with Dynamic Leading Velocity and Network-Induced Delays" Entropy 24, no. 2: 305. https://doi.org/10.3390/e24020305
APA StyleWang, Z., Xu, M., Liu, L., Fang, C., Sun, Y., & Chen, H. (2022). Optimal UAV Formation Tracking Control with Dynamic Leading Velocity and Network-Induced Delays. Entropy, 24(2), 305. https://doi.org/10.3390/e24020305