
Self-Adaptive Image Thresholding within Nonextensive Entropy and the Variance of the Gray-Level Distribution


Abstract
:1. Introduction
2. Image Thresholding Algorithms
2.1. Otsu Algorithm
2.2. Otsu–Kapur Algorithm
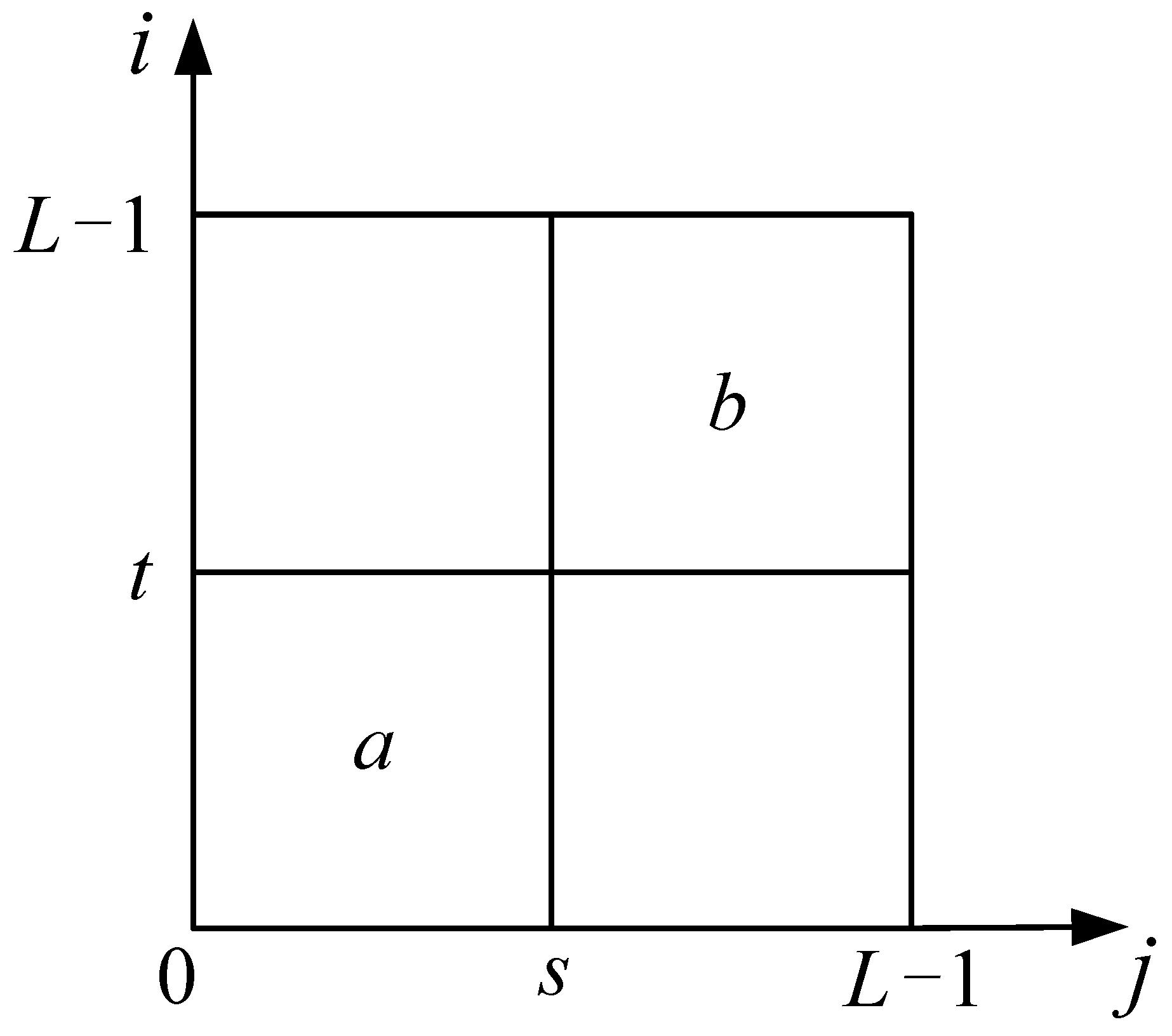
2.3. Two-Dimensional Entropic Algorithm
2.4. Tsallis Entropy Algorithm
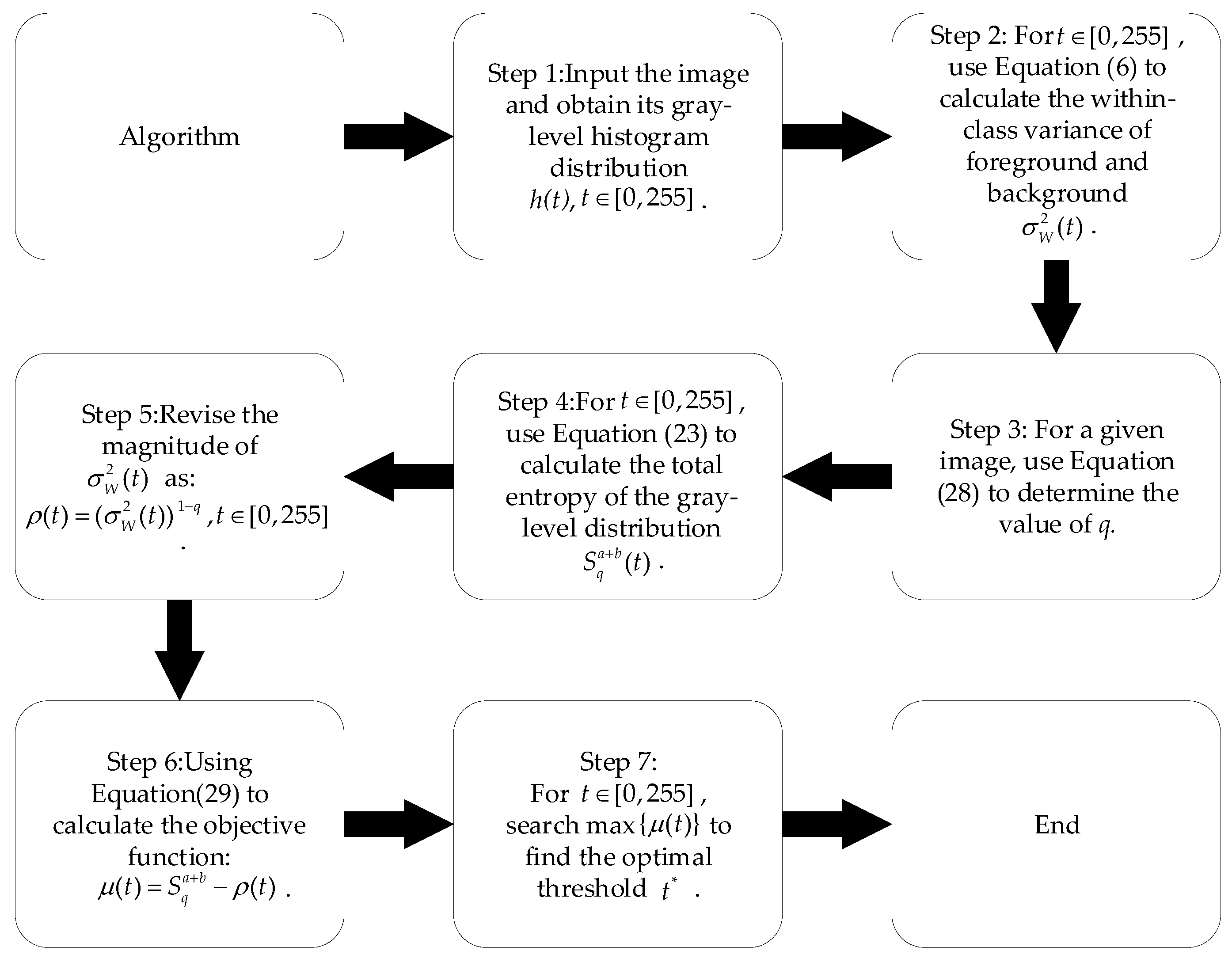
3. New Algorithm
4. Analysis of Experimental Results
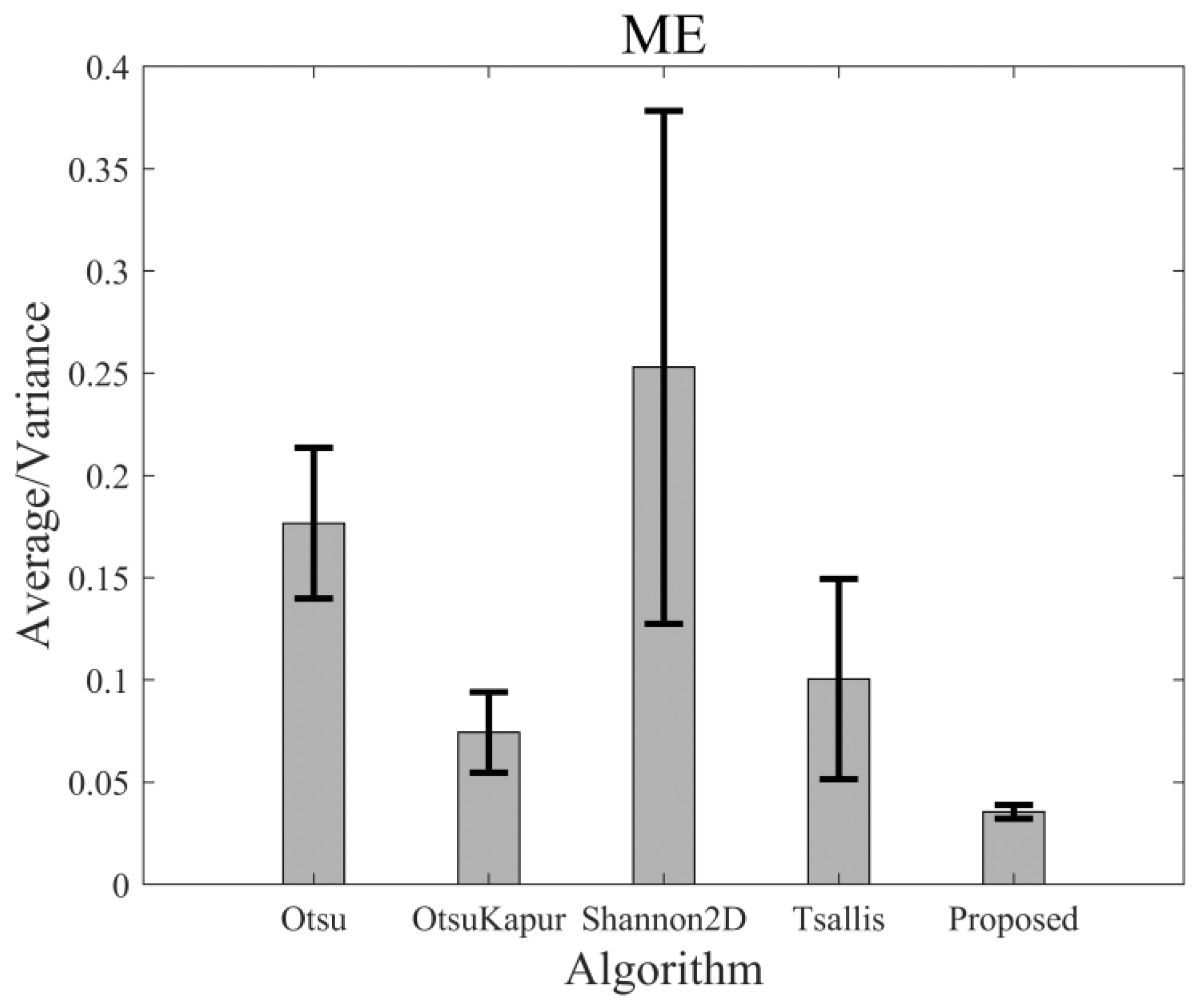
4.1. Misclassification Error (ME)
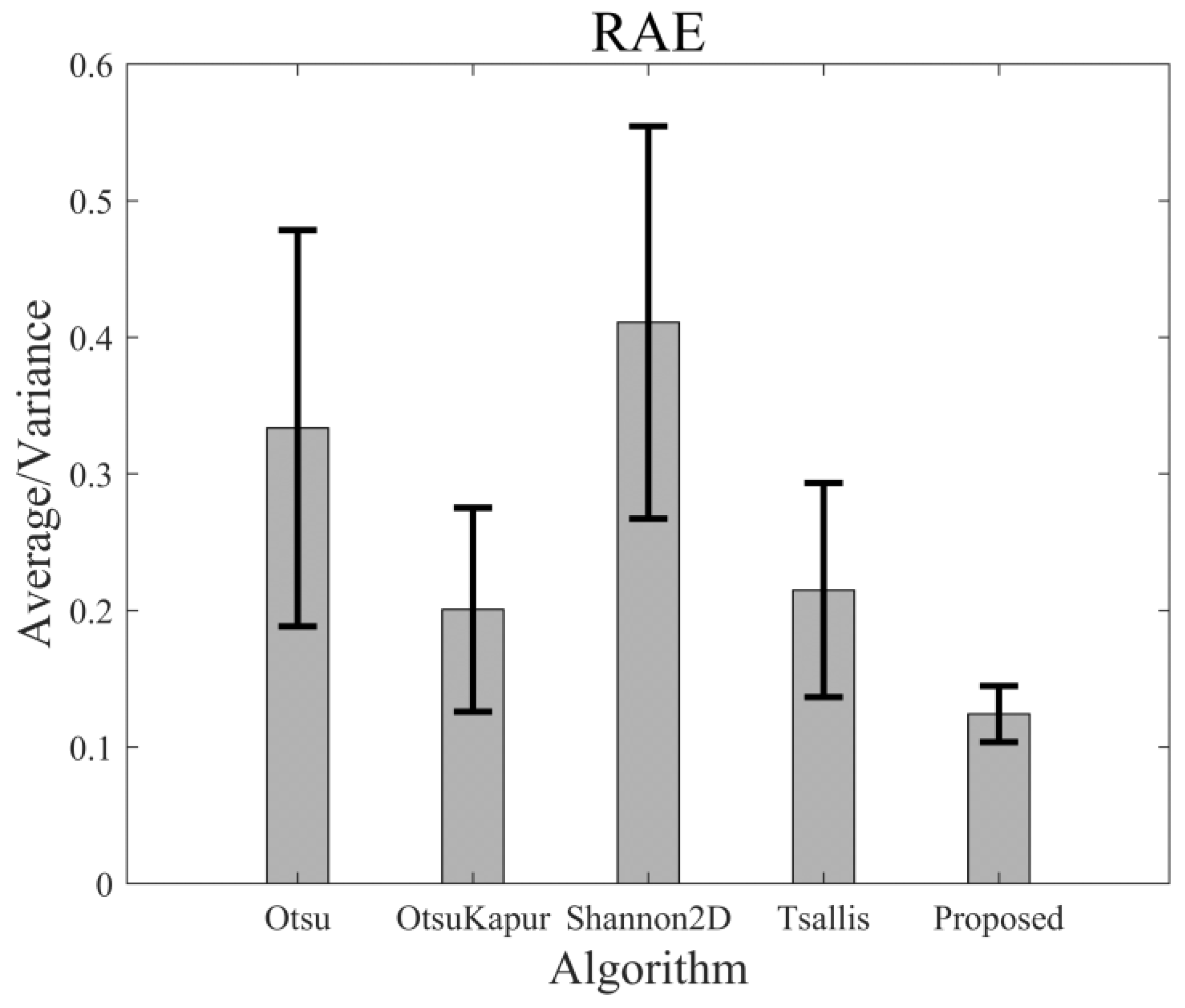
4.2. Relative Foreground Area Error (RAE)
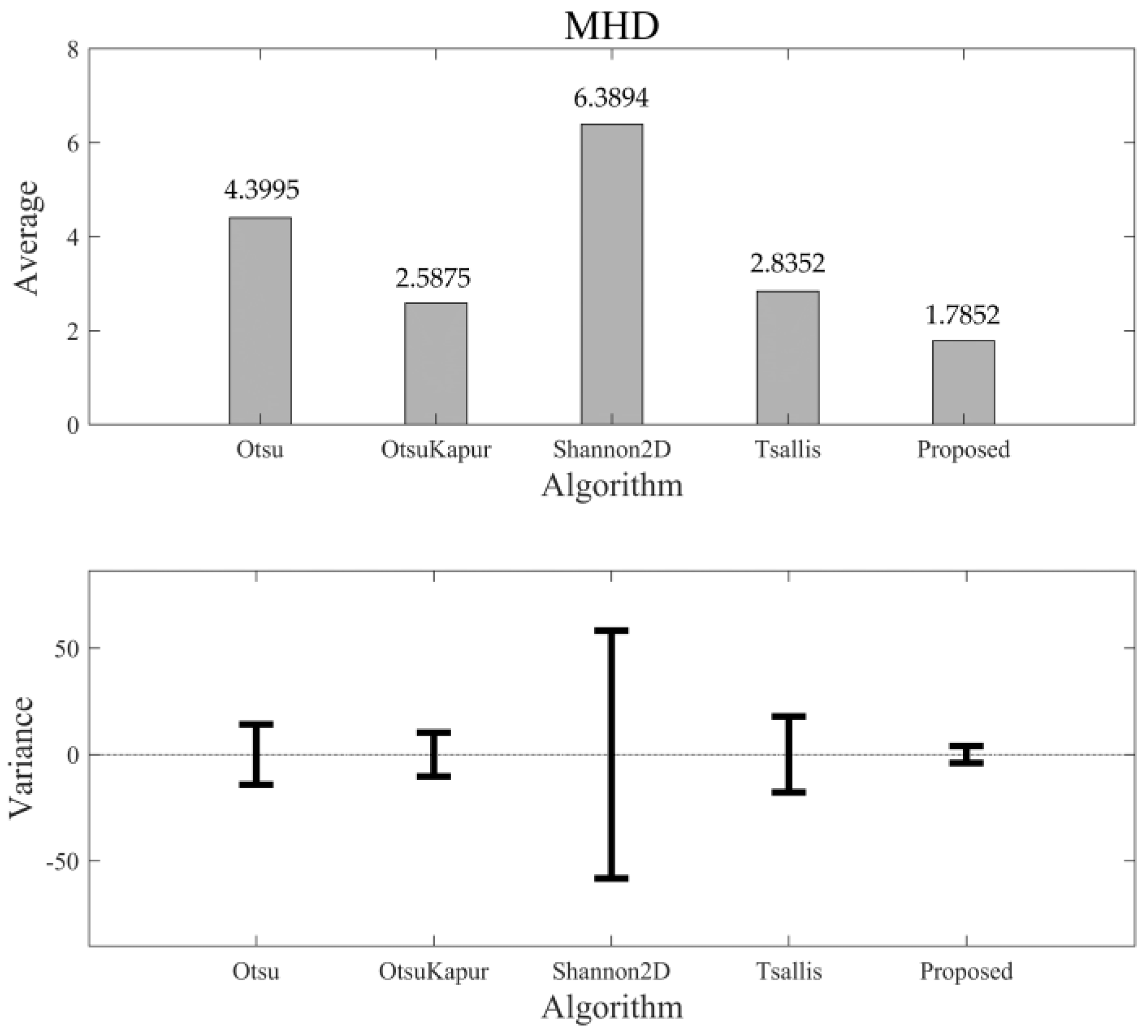
4.3. Modified Hausdorff Distance (MHD)
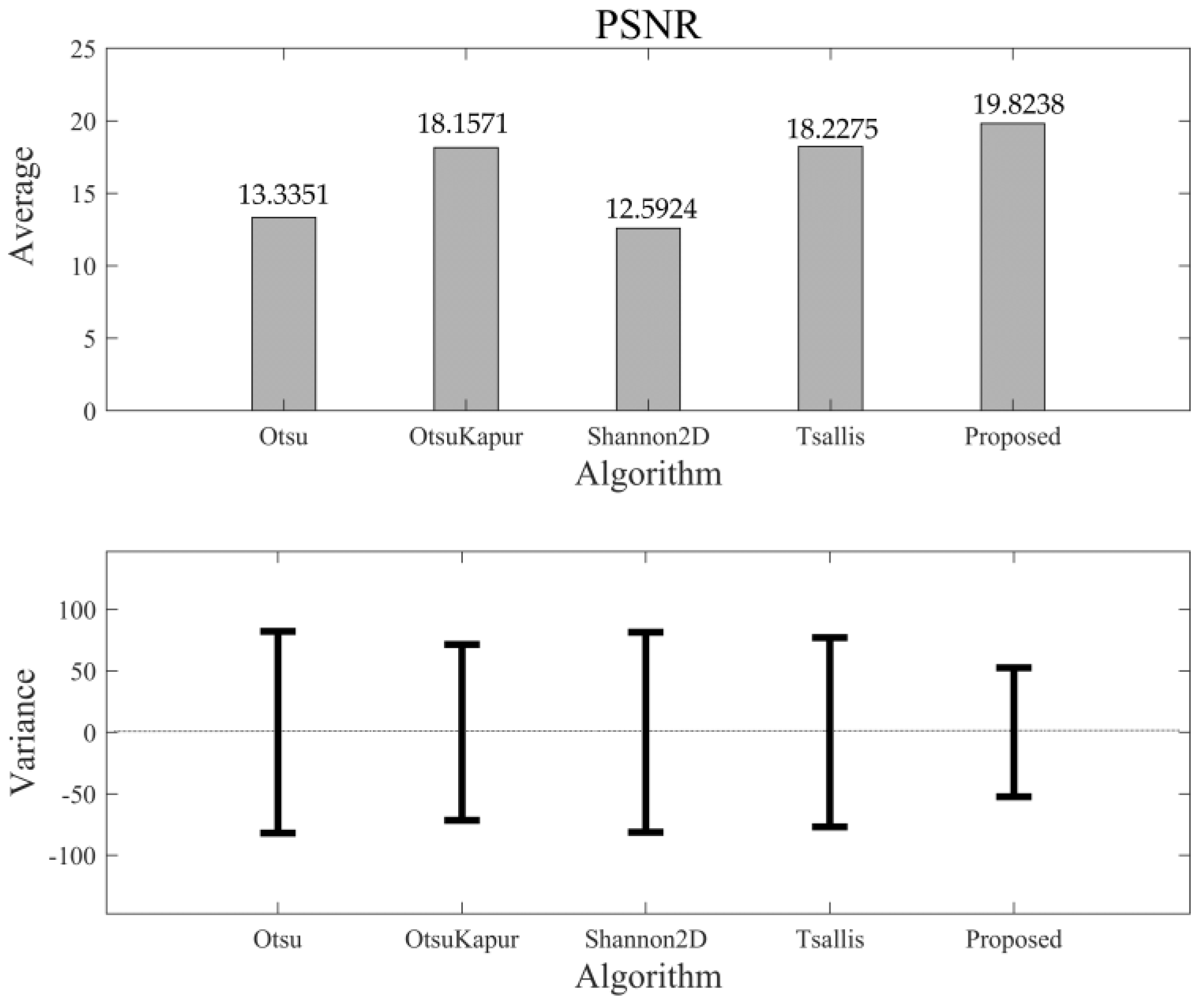
4.4. Peak Signal-to-Noise Ratio (PSNR)
4.5. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lei, B.; Fan, J. Image thresholding segmentation method based on minimum square rough entropy. Appl. Soft Comput. 2019, 84, 105687. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, B. Image segmentation technology and its application in digital image processing. In Proceedings of the 2021 IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2021; pp. 1174–1177. [Google Scholar] [CrossRef]
- Song, Y.; Yan, H. Image Segmentation Techniques Overview. In Proceedings of the 2017 Asia Modelling Symposium (AMS), Kota Kinabalu, Malaysia, 4–6 December 2017; pp. 103–107. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. Syst. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Merzban, M.H.; Elbayoumi, M. Efficient solution of Otsu multilevel image thresholding: A comparative study. Expert Syst. Appl. 2019, 116, 299–309. [Google Scholar] [CrossRef]
- Naidu, M.S.R.; Kumar, P.R.; Chiranjeevi, K. Shannon and Fuzzy entropy based evolutionary image thresholding for image segmentation. Alex. Eng. J. 2018, 57, 1643–1655. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Oliva, D.; Ewees, A.A.; Xiong, S. Multi-level thresholding-based grey scale image segmentation using multi-objective multi-verse optimizer. Expert Syst. Appl. 2019, 125, 112–129. [Google Scholar] [CrossRef]
- Liu, L.; Huo, J. Apple Image Recognition Multi-Objective Method Based on the Adaptive Harmony Search Algorithm with Simulation and Creation. Information 2018, 9, 180. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Liu, W.; Zhang, X.; Liu, Z.; Liu, Y.; Wang, G. An Interval Iteration Based Multilevel Thresholding Algorithm for Brain MR Image Segmentation. Entropy 2021, 23, 1429. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Chang, V.; Mohamed, R. A novel equilibrium optimization algorithm for multi-thresholding image segmentation problems. Neural Comput. Appl. 2020, 33, 10685–10718. [Google Scholar] [CrossRef]
- Wu, B.; Zhou, J.; Ji, X.; Yin, Y.; Shen, X. An ameliorated teaching-learning-based optimization algorithm based study of image segmentation for multilevel thresholding using Kapur’s entropy and Otsu’s between class variance. Inf. Sci. 2020, 533, 72–107. [Google Scholar] [CrossRef]
- El-Sayed, M.A.; Ali, A.A.; Hussien, M.E.; Sennary, H.A. A Multi-Level Threshold Method for Edge Detection and Segmentation Based on Entropy. Comput. Mater. Contin. 2020, 63, 1–16. [Google Scholar] [CrossRef]
- Truong, M.T.N.; Kim, S. Automatic image thresholding using Otsu’s method and entropy weighting scheme for surface defect detection. Soft Comput. 2018, 22, 4197–4203. [Google Scholar] [CrossRef]
- Pare, S.; Kumar, A.; Singh, G.K.; Bajaj, V. Image Segmentation Using Multilevel Thresholding: A Research Review. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 1–29. [Google Scholar] [CrossRef]
- Ye, Z.; Yang, J.; Wang, M.; Zong, X.; Yan, L.; Liu, W. 2D Tsallis Entropy for Image Segmentation Based on Modified Chaotic Bat Algorithm. Entropy 2018, 20, 239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, X.; Li, T.; Li, H.; Xia, S.; Ren, F.; Sun, Y.; Xu, X. A Robust Parameter-Free Thresholding Method for Image Segmentation. IEEE Access 2019, 7, 3448–3458. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Cai, L.; Wu, F. Image segmentation based on gray level and local relative entropy two dimensional histogram. PLoS ONE 2020, 15, e0229651. [Google Scholar] [CrossRef]
- Khairuzzaman, A.K.M.; Chaudhury, S. Masi entropy based multilevel thresholding for image segmentation. Multimed. Tools Appl. 2019, 78, 33573–33591. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, L.; Yu, F.; Heidari, A.A.; Wang, M.; Liang, G.; Muhammad, K.; Chen, H. Chaotic random spare ant colonyoptimization for multi-threshold image segmentation of 2D Kapur entropy. Knowl.-Based Syst. 2021, 216, 106510. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Kumar, I.V.; Srinivas, K. Cuttlefish algorithm-based multilevel 3-D Otsu function for color image segmentation. IEEE Trans. Instrum. Meas. 2020, 69, 1871–1880. [Google Scholar] [CrossRef]
- Albuquerque, M.P.D.; Esquef, I.A.; Gesualdi Mello, A.R.; Albuquerque, M.P.D. Image thresholding using Tsallis entropy. Pattern Recognit. Lett. 2004, 25, 1059–1065. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, R.; Li, Y.; Zhang, P.; Yang, J.; Zhao, X.; Liu, M.; Wu, D. Multispectral image segmentation based on a Fuzzy clustering algorithm combined with Tsallis entropy and a Gaussian mixture model. Remote Sens. 2019, 11, 2772. [Google Scholar] [CrossRef] [Green Version]
- Tsallis, C. Possible generalization of Boltzmann-Gibbs statistics. J. Stat. Phys. 1988, 52, 479–487. [Google Scholar] [CrossRef]
- Lin, Q.; Ou, C. Tsallis entropy and the long-range correlation in image thresholding. Signal Process. 2012, 92, 2931–2939. [Google Scholar] [CrossRef]
- Abdiel, R.R.; Alejandro, H.M.; Gerardo, H.C.; Ismael, D.J. Determining the entropic index q of Tsallis entropy in images through redundancy. Entropy 2016, 18, 299. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Fan, C.; Ouyang, H.; Abate, A.F.; Wan, S. Adaptive trapezoid region intercept histogram based Otsu method for brain MR image segmentation. J. Ambient. Intell. Humaniz Comput. 2021, 12, 1–16. [Google Scholar] [CrossRef]
- Hernández Reséndiz, J.D.; Marin Castro, H.M.; Tello Leal, E. A Comparative Study of Clustering Validation Indices and Maximum Entropy for Sintonization of Automatic Segmentation Techniques. IEEE Lat. Am. Trans. 2019, 17, 1229–1236. [Google Scholar] [CrossRef]
- Wu, B.; Zhu, L.; Cao, J.; Wang, J. A Hybrid Preaching Optimization Algorithm Based on Kapur Entropy for Multilevel Thresholding Color Image Segmentation. Entropy 2021, 23, 1599. [Google Scholar] [CrossRef]
- Mousavirad, S.J.; Zabihzadeh, D.; Oliva, D.; Perez-Cisneros, M.; Schaefer, G. A Grouping Differential Evolution Algorithm Boosted by Attraction and Repulsion Strategies for Masi Entropy-Based Multi-Level Image Segmentation. Entropy 2022, 24, 8. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, Z.; Liu, H. An adaptive and robust edge detection method based on edge proportion statistics. IEEE Trans. Image Process. 2020, 29, 5206–5215. [Google Scholar] [CrossRef]
- Lin, S.; Jia, H.; Abualigah, L.; Altalhi, M. Enhanced Slime Mould Algorithm for Multilevel Thresholding Image Segmentation Using Entropy Measures. Entropy 2021, 23, 1700. [Google Scholar] [CrossRef]
- Song, S.; Jia, H.; Ma, J. A Chaotic Electromagnetic Field Optimization Algorithm Based on Fuzzy Entropy for Multilevel Thresholding Color Image Segmentation. Entropy 2019, 21, 398. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.H.; Seyed, H.Z. Unsupervised Data and Histogram Clustering Using Inclined Planes System Optimization Algorithm. Image Anal. Stereol. 2014, 33, 65–74. [Google Scholar] [CrossRef]
- Pun, T. Entropic thresholding, a new approach. Comput. Graph. Image Process. 1981, 16, 210–239. [Google Scholar] [CrossRef] [Green Version]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Abutaleb, A.S. Automatic thresholding of gray-level pictures using two-dimensional entropy. Comput. Vis. Graph. Image Process. 1989, 47, 22–32. [Google Scholar] [CrossRef]
- Brink, A.D. Thresholding of digital images using two-dimensional entropies. Pattern Recognit. 1992, 25, 803–808. [Google Scholar] [CrossRef]
- Tsallis, C.; Mendes, R.S.; Plastino, A.R. The role of constraints within generalized nonextensive statistics. Physica. A 1998, 261, 534–554. [Google Scholar] [CrossRef]
- Huang, Z.; Ou, C.; Lin, B.; Su, G.; Chen, J. The available force in long-duration memory complex systems and its statistical physical properties. Europhys. Lett. 2013, 103, 10011. [Google Scholar] [CrossRef]
- Ou, C.; Kaabouchi, A.E.; Mehaute, A.L.; Wang, Q.A.; Chen, J. Generalized measurement of uncertainty and the maximizable entropy. Mod. Phys. Lett. B 2008, 24, 825–831. [Google Scholar] [CrossRef]
- Yasnoff, W.A.; Mui, J.K.; Bacus, J.W. Error measures for scene segmentation. Pattern Recognit. 1977, 9, 217–231. [Google Scholar] [CrossRef]
- Kampke, T.; Kober, R. Nonparametric optimal binarization. In Proceedings of the Fourteenth International Conference on Pattern Recognition, Brisbane, Australia, 16–20 August 1998; Volume 1, pp. 27–29. [Google Scholar] [CrossRef]
- Dubuisson, M.P.; Jain, A.K. A modified Hausdorff distance for object matching. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; Volume 1, pp. 566–568. [Google Scholar] [CrossRef]
- Dhal, K.G.; Das, A.; Ray, S.; Jorge, G.; Sanjoy, D. Nature-inspired optimization algorithms and their application in multi-thresholding image segmentation. Arch. Comput. Methods Eng. 2019, 27, 855–888. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, J.; Upadhyay, M.; Sun, S.; Jiang, T. Automatic image thresholding based on Shannon entropy difference and dynamic synergic entropy. IEEE Access 2020, 8, 171218–171239. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | q | Test | q | Test | q |
|---|---|---|---|---|---|
| 1 | 0.6971 | 18 | 0.4908 | 35 | 0.5385 |
| 2 | 0.3891 | 19 | 0.3971 | 36 | 0.5217 |
| 3 | 0.6992 | 20 | 0.6089 | 37 | 0.5613 |
| 4 | 0.4067 | 21 | 0.5240 | 38 | 0.4409 |
| 5 | 0.6424 | 22 | 0.4844 | 39 | 0.5170 |
| 6 | 0.4933 | 23 | 0.4003 | 40 | 0.5139 |
| 7 | 0.4472 | 24 | 0.5079 | 41 | 0.5189 |
| 8 | 0.4706 | 25 | 0.4895 | 42 | 0.4960 |
| 9 | 0.4846 | 26 | 0.4724 | 43 | 0.5670 |
| 10 | 0.4990 | 27 | 0.5000 | 44 | 0.5107 |
| 11 | 0.5218 | 28 | 0.5730 | 45 | 0.5304 |
| 12 | 0.5159 | 29 | 0.5602 | 46 | 0.4680 |
| 13 | 0.4993 | 30 | 0.4379 | 47 | 0.4757 |
| 14 | 0.4572 | 31 | 0.5881 | 48 | 0.5823 |
| 15 | 0.6161 | 32 | 0.5557 | 49 | 0.5716 |
| 16 | 0.5976 | 33 | 0.4936 | 50 | 0.4884 |
| 17 | 0.5276 | 34 | 0.5479 |
| Images | Otsu | Otsu-Kapur | Shannon2D | Tsallis | Proposed |
|---|---|---|---|---|---|
| 1 | 3.628 × 10−3 | 8.611 × 10−3 | 1.213 × 10−1 | 2.205 × 10−1 | 4.408 × 10−2 |
| 2 | 5.453 × 10−1 | 5.366 × 10−1 | 4.563 × 10−1 | 1.487 × 10−3 | 1.416 × 10−3 |
| 3 | 2.946 × 10−3 | 2.188 × 10−3 | 8.968 × 10−1 | 8.965 × 10−1 | 3.899 × 10−3 |
| 4 | 6.011 × 10−1 | 6.169 × 10−1 | 6.639 × 10−3 | 1.514 × 10−3 | 2.614 × 10−3 |
| 5 | 1.083 × 10−2 | 9.282 × 10−3 | 9.399 × 10−1 | 9.401 × 10−1 | 4.328 × 10−3 |
| 6 | 3.580 × 10−1 | 3.136 × 10−1 | 1.053 × 10−2 | 1.247 × 10−2 | 2.623 × 10−2 |
| 7 | 4.384 × 10−1 | 1.006 × 10−3 | 1.006 × 10−3 | 1.822 × 10−3 | 1.388 × 10−3 |
| 8 | 2.930 × 10−1 | 5.017 × 10−3 | 1.941 × 10−2 | 5.503 × 10−3 | 5.017 × 10−3 |
| 9 | 1.168 × 10−3 | 1.917 × 10−3 | 3.372 × 10−3 | 3.196 × 10−3 | 2.799 × 10−3 |
| 10 | 7.516 × 10−3 | 1.917 × 10−3 | 9.763 × 10−3 | 9.532 × 10−3 | 7.789 × 10−3 |
| 11 | 2.305 × 10−2 | 3.689 × 10−2 | 5.975 × 10−2 | 3.689 × 10−2 | 3.689 × 10−2 |
| 12 | 2.034 × 10−2 | 3.025 × 10−2 | 5.327 × 10−2 | 3.943 × 10−2 | 3.943 × 10−2 |
| 13 | 1.950 × 10−2 | 6.446 × 10−3 | 5.553 × 10−2 | 8.635 × 10−1 | 1.950 × 10−2 |
| 14 | 3.745 × 10−1 | 1.221 × 10−2 | 2.893 × 10−2 | 1.317 × 10−2 | 1.221 × 10−2 |
| 15 | 1.002 × 10−2 | 1.122 × 10−2 | 3.156 × 10−2 | 2.614 × 10−2 | 1.685 × 10−2 |
| 16 | 4.359 × 10−3 | 4.359 × 10−3 | 2.533 × 10−2 | 1.671 × 10−2 | 6.512 × 10−3 |
| 17 | 2.238 × 10−2 | 2.651 × 10−2 | 5.562 × 10−2 | 2.866 × 10−2 | 2.651 × 10−2 |
| 18 | 4.041 × 10−1 | 3.276 × 10−2 | 5.220 × 10−2 | 2.166 × 10−2 | 3.276 × 10−2 |
| 19 | 4.014 × 10−1 | 4.014 × 10−1 | 5.303 × 10−4 | 3.409 × 10−4 | 2.272 × 10−4 |
| 20 | 2.714 × 10−1 | 6.770 × 10−4 | 8.680 × 10−4 | 7.118 × 10−2 | 6.770 × 10−4 |
| 21 | 1.126 × 10−2 | 1.126 × 10−2 | 1.119 × 10−2 | 1.126 × 10−2 | 9.982 × 10−3 |
| 22 | 5.111 × 10−1 | 2.359 × 10−2 | 4.783 × 10−2 | 2.476 × 10−2 | 2.359 × 10−2 |
| 23 | 5.150 × 10−1 | 5.150 × 10−1 | 3.889 × 10−1 | 8.214 × 10−3 | 4.829 × 10−3 |
| 24 | 4.171 × 10−1 | 4.278 × 10−2 | 4.346 × 10−2 | 4.391 × 10−2 | 4.278 × 10−2 |
| 25 | 5.128 × 10−1 | 3.313 × 10−3 | 7.931 × 10−3 | 3.313 × 10−3 | 3.313 × 10−3 |
| 26 | 1.737 × 10−3 | 6.830 × 10−4 | 6.803 × 10−3 | 2.590 × 10−3 | 2.590 × 10−3 |
| 27 | 1.998 × 10−2 | 2.161 × 10−2 | 1.662 × 10−2 | 1.998 × 10−2 | 2.161 × 10−2 |
| 28 | 4.378 × 10−2 | 5.334 × 10−2 | 1.167 × 10−1 | 6.683 × 10−2 | 5.843 × 10−2 |
| 29 | 3.967 × 10−1 | 2.186 × 10−2 | 3.360 × 10−2 | 1.654 × 10−2 | 2.186 × 10−2 |
| 30 | 4.126 × 10−1 | 6.240 × 10−4 | 9.885 × 10−1 | 8.053 × 10−4 | 1.888 × 10−3 |
| 31 | 9.050 × 10−3 | 1.214 × 10−2 | 1.954 × 10−2 | 2.059 × 10−2 | 1.749 × 10−2 |
| 32 | 1.881 × 10−1 | 1.928 × 10−1 | 8.684 × 10−1 | 2.020 × 10−1 | 1.975 × 10−1 |
| 33 | 2.676 × 10−1 | 2.789 × 10−1 | 2.642 × 10−1 | 2.921 × 10−1 | 2.882 × 10−1 |
| 34 | 5.120 × 10−3 | 5.020 × 10−3 | 9.320 × 10−1 | 7.235 × 10−3 | 6.085 × 10−3 |
| 35 | 3.980 × 10−2 | 8.950 × 10−3 | 1.796 × 10−2 | 9.851 × 10−3 | 9.851 × 10−3 |
| 36 | 9.672 × 10−2 | 8.409 × 10−2 | 8.336 × 10−2 | 8.409 × 10−2 | 8.409 × 10−2 |
| 37 | 1.425 × 10−2 | 1.195 × 10−2 | 9.081 × 10−1 | 7.309 × 10−3 | 6.360 × 10−3 |
| 38 | 2.487 × 10−1 | 3.413 × 10−4 | 9.976 × 10−1 | 2.453 × 10−4 | 3.413 × 10−4 |
| 39 | 7.105 × 10−3 | 4.132 × 10−3 | 9.818 × 10−1 | 3.855 × 10−3 | 3.855 × 10−3 |
| 40 | 2.120 × 10−1 | 1.879 × 10−1 | 5.034 × 10−1 | 5.036 × 10−1 | 1.434 × 10−1 |
| 41 | 1.169 × 10−1 | 1.243 × 10−1 | 2.059 × 10−1 | 1.661 × 10−1 | 1.462 × 10−1 |
| 42 | 5.753 × 10−3 | 2.372 × 10−3 | 9.867 × 10−1 | 2.372 × 10−3 | 3.891 × 10−3 |
| 43 | 1.121 × 10−1 | 1.172 × 10−1 | 1.540 × 10−1 | 1.158 × 10−1 | 1.172 × 10−1 |
| 44 | 1.081 × 10−4 | 2.012 × 10−3 | 7.158 × 10−1 | 2.792 × 10−3 | 3.765 × 10−3 |
| 45 | 6.593 × 10−2 | 7.443 × 10−2 | 7.850 × 10−2 | 7.610 × 10−2 | 7.747 × 10−2 |
| 46 | 4.632 × 10−1 | 2.564 × 10−3 | 8.158 × 10−3 | 2.913 × 10−3 | 2.564 × 10−3 |
| 47 | 1.810 × 10−1 | 1.621 × 10−1 | 1.746 × 10−1 | 1.447 × 10−1 | 1.563 × 10−1 |
| 48 | 1.727 × 10−2 | 1.940 × 10−2 | 2.483 × 10−1 | 3.504 × 10−2 | 2.738 × 10−2 |
| 49 | 6.357 × 10−3 | 4.805 × 10−3 | 4.645 × 10−3 | 1.680 × 10−3 | 1.226 × 10−3 |
| 50 | 1.773 × 10−1 | 1.574 × 10−3 | 1.504 × 10−3 | 1.875 × 10−3 | 1.574 × 10−3 |
| Images | Otsu | Otsu-Kapur | Shannon2D | Tsallis | Proposed |
|---|---|---|---|---|---|
| 1 | 1.031 × 10−2 | 2.776 × 10−2 | 4.025 × 10−1 | 7.316 × 10−1 | 1.462 × 10−1 |
| 2 | 9.964 × 10−1 | 9.963 × 10−1 | 9.957 × 10−1 | 3.640 × 10−1 | 3.428 × 10−1 |
| 3 | 1.988 × 10−3 | 9.748 × 10−4 | 9.758 × 10−1 | 9.753 × 10−1 | 3.780 × 10−3 |
| 4 | 2.897 × 10−1 | 2.653 × 10−1 | 9.690 × 10−1 | 9.694 × 10−1 | 2.158 × 10−1 |
| 5 | 6.043 × 10−1 | 6.202 × 10−1 | 6.624 × 10−3 | 1.380 × 10−3 | 2.511 × 10−3 |
| 6 | 3.668 × 10−1 | 4.187 × 10−1 | 1.045 × 10−2 | 1.459 × 10−2 | 3.068 × 10−2 |
| 7 | 9.851 × 10−1 | 2.551 × 10−2 | 2.051 × 10−2 | 1.415 × 10−1 | 8.173 × 10−2 |
| 8 | 9.622 × 10−1 | 3.009 × 10−1 | 6.280 × 10−1 | 3.210 × 10−1 | 3.009 × 10−1 |
| 9 | 3.699 × 10−2 | 8.886 × 10−2 | 1.464 × 10−1 | 1.398 × 10−1 | 1.246 × 10−1 |
| 10 | 1.569 × 10−2 | 8.886 × 10−2 | 1.352 × 10−2 | 9.160 × 10−3 | 3.171 × 10−3 |
| 11 | 2.542 × 10−2 | 4.068 × 10−2 | 6.589 × 10−2 | 4.068 × 10−2 | 4.068 × 10−2 |
| 12 | 2.290 × 10−2 | 3.416 × 10−2 | 6.015 × 10−2 | 4.452 × 10−2 | 4.452 × 10−2 |
| 13 | 8.167 × 10−2 | 2.120 × 10−1 | 4.338 × 10−1 | 9.225 × 10−1 | 2.120 × 10−1 |
| 14 | 9.742 × 10−1 | 5.519 × 10−1 | 7.448 × 10−1 | 5.705 × 10−1 | 5.519 × 10−1 |
| 15 | 1.710 × 10−2 | 3.738 × 10−2 | 1.961 × 10−1 | 1.609 × 10−1 | 9.227 × 10−2 |
| 16 | 1.156 × 10−2 | 1.156 × 10−2 | 6.296 × 10−2 | 4.434 × 10−2 | 1.727 × 10−2 |
| 17 | 1.011 × 10−1 | 1.175 × 10−1 | 2.184 × 10−1 | 1.258 × 10−1 | 1.175 × 10−1 |
| 18 | 4.710 × 10−1 | 2.131 × 10−2 | 4.327 × 10−2 | 7.205 × 10−3 | 2.131 × 10−2 |
| 19 | 9.948 × 10−1 | 9.948 × 10−1 | 2.029 × 10−1 | 1.129 × 10−1 | 6.779 × 10−2 |
| 20 | 9.675 × 10−1 | 2.416 × 10−2 | 3.314 × 10−2 | 3.136 × 10−2 | 2.416 × 10−2 |
| 21 | 4.315 × 10−1 | 4.315 × 10−1 | 4.300 × 10−1 | 4.315 × 10−1 | 4.021 × 10−1 |
| 22 | 9.552 × 10−1 | 4.787 × 10−1 | 6.642 × 10−1 | 4.938 × 10−1 | 4.787 × 10−1 |
| 23 | 9.762 × 10−1 | 9.762 × 10−1 | 9.687 × 10−1 | 3.959 × 10−1 | 2.781 × 10−1 |
| 24 | 8.857 × 10−1 | 4.430 × 10−1 | 4.469 × 10−1 | 4.494 × 10−1 | 4.430 × 10−1 |
| 25 | 9.551 × 10−1 | 1.143 × 10−1 | 2.476 × 10−1 | 1.208 × 10−1 | 1.143 × 10−1 |
| 26 | 1.790 × 10−3 | 1.692 × 10−5 | 6.459 × 10−3 | 2.008 × 10−3 | 2.008 × 10−3 |
| 27 | 1.010 × 10−2 | 1.261 × 10−2 | 6.825 × 10−3 | 1.010 × 10−2 | 1.261 × 10−2 |
| 28 | 3.615 × 10−2 | 1.110 × 10−1 | 3.536 × 10−1 | 1.782 × 10−1 | 1.395 × 10−1 |
| 29 | 4.042 × 10−1 | 2.227 × 10−2 | 3.423 × 10−2 | 1.685 × 10−2 | 2.227 × 10−2 |
| 30 | 4.145 × 10−1 | 4.988 × 10−4 | 9.944 × 10−1 | 2.199 × 10−4 | 9.230 × 10−4 |
| 31 | 1.719 × 10−2 | 1.781 × 10−2 | 9.285 × 10−2 | 8.773 × 10−2 | 6.442 × 10−2 |
| 32 | 1.937 × 10−1 | 1.988 × 10−1 | 9.007 × 10−1 | 2.088 × 10−1 | 2.038 × 10−1 |
| 33 | 2.787 × 10−1 | 2.904 × 10−1 | 2.752 × 10−1 | 3.042 × 10−1 | 3.001 × 10−1 |
| 34 | 3.808 × 10−3 | 2.893 × 10−3 | 9.977 × 10−1 | 3.324 × 10−3 | 1.986 × 10−3 |
| 35 | 1.867 × 10−1 | 4.910 × 10−2 | 6.479 × 10−2 | 2.067 × 10−2 | 2.067 × 10−2 |
| 36 | 2.157 × 10−1 | 1.399 × 10−1 | 9.805 × 10−2 | 1.399 × 10−1 | 1.399 × 10−1 |
| 37 | 1.514 × 10−2 | 1.264 × 10−2 | 9.946 × 10−1 | 2.725 × 10−3 | 5.820 × 10−3 |
| 38 | 2.491 × 10−1 | 3.419 × 10−4 | 9.995 × 10−1 | 2.457 × 10−4 | 3.419 × 10−4 |
| 39 | 7.191 × 10−3 | 4.195 × 10−3 | 9.986 × 10−1 | 2.747 × 10−3 | 2.747 × 10−3 |
| 40 | 1.141 × 10−2 | 9.791 × 10−3 | 9.979 × 10−1 | 9.987 × 10−1 | 4.589 × 10−3 |
| 41 | 1.679 × 10−1 | 1.796 × 10−1 | 3.030 × 10−1 | 2.432 × 10−1 | 2.133 × 10−1 |
| 42 | 5.796 × 10−3 | 1.452 × 10−3 | 9.996 × 10−1 | 1.452 × 10−3 | 4.138 × 10−4 |
| 43 | 1.128 × 10−1 | 1.190 × 10−1 | 1.599 × 10−1 | 1.174 × 10−1 | 1.190 × 10−1 |
| 44 | 1.108 × 10−4 | 2.063 × 10−3 | 7.342 × 10−1 | 2.864 × 10−3 | 3.862 × 10−3 |
| 45 | 5.195 × 10−2 | 6.429 × 10−2 | 7.306 × 10−2 | 6.650 × 10−2 | 6.842 × 10−2 |
| 46 | 9.915 × 10−1 | 3.928 × 10−1 | 6.730 × 10−1 | 4.237 × 10−1 | 3.928 × 10−1 |
| 47 | 2.117 × 10−1 | 1.897 × 10−1 | 2.042 × 10−1 | 1.693 × 10−1 | 1.829 × 10−1 |
| 48 | 4.399 × 10−2 | 2.698 × 10−2 | 5.420 × 10−1 | 1.175 × 10−1 | 8.164 × 10−2 |
| 49 | 6.647 × 10−3 | 4.985 × 10−3 | 4.885 × 10−3 | 1.077 × 10−3 | 3.077 × 10−4 |
| 50 | 8.989 × 10−1 | 6.968 × 10−2 | 4.994 × 10−2 | 1.045 × 10−2 | 6.968 × 10−2 |
| Images | Otsu | Otsu-Kapur | Shannon2D | Tsallis | Proposed |
|---|---|---|---|---|---|
| 1 | 0.7029 | 1.2836 | 4.9663 | 6.7715 | 3.1038 |
| 2 | 11.7156 | 11.6110 | 10.6244 | 0.1976 | 0.1890 |
| 3 | 0.5922 | 0.5024 | 18.4577 | 18.4577 | 0.6871 |
| 4 | 14.3347 | 14.6405 | 0.8646 | 0.3246 | 0.4621 |
| 5 | 1.2517 | 1.1626 | 21.3836 | 21.3640 | 0.7552 |
| 6 | 9.2300 | 10.2477 | 1.0750 | 0.9396 | 1.4021 |
| 7 | 9.4387 | 0.1241 | 0.1157 | 0.2332 | 0.1869 |
| 8 | 7.9342 | 0.5524 | 1.4978 | 0.5838 | 0.5524 |
| 9 | 0.1166 | 0.2286 | 0.3417 | 0.3543 | 0.3202 |
| 10 | 1.0453 | 1.0482 | 1.2970 | 1.3117 | 1.0921 |
| 11 | 1.3459 | 1.8848 | 2.5976 | 1.8848 | 1.8848 |
| 12 | 1.1320 | 1.5287 | 2.3010 | 1.9039 | 1.9039 |
| 13 | 0.3694 | 0.8507 | 1.6909 | 8.8287 | 0.8507 |
| 14 | 8.6337 | 1.3737 | 2.2707 | 1.4357 | 1.3737 |
| 15 | 0.8680 | 0.9532 | 1.6164 | 1.5651 | 1.2187 |
| 16 | 0.2710 | 0.2710 | 1.0297 | 0.7990 | 0.3800 |
| 17 | 1.2400 | 1.3689 | 2.0293 | 1.4668 | 1.3689 |
| 18 | 7.9769 | 1.9261 | 2.4025 | 1.5822 | 1.9261 |
| 19 | 6.9689 | 6.9689 | 0.0219 | 0.0339 | 0.0294 |
| 20 | 4.1651 | 0.1266 | 0.1433 | 0.1349 | 0.1266 |
| 21 | 0.8545 | 0.8545 | 0.8520 | 0.8545 | 0.7773 |
| 22 | 9.8265 | 1.6602 | 2.3906 | 1.6995 | 1.6602 |
| 23 | 11.2817 | 11.2817 | 9.7391 | 0.8620 | 0.5391 |
| 24 | 6.1740 | 1.8942 | 1.9034 | 1.9199 | 1.8942 |
| 25 | 9.1926 | 0.4914 | 1.0172 | 0.4914 | 0.4914 |
| 26 | 0.3106 | 0.1967 | 1.0152 | 0.5496 | 0.5496 |
| 27 | 1.8218 | 1.8572 | 1.6733 | 1.8218 | 1.8572 |
| 28 | 3.2017 | 3.4556 | 1.8630 | 3.4965 | 3.4838 |
| 29 | 4.6476 | 0.4281 | 0.5962 | 0.3106 | 0.4281 |
| 30 | 10.3385 | 0.1780 | 21.6996 | 0.2272 | 0.3698 |
| 31 | 1.2804 | 1.6457 | 2.2450 | 2.4751 | 2.1817 |
| 32 | 5.6362 | 5.7402 | 18.5767 | 5.9757 | 5.8568 |
| 33 | 5.5016 | 6.1290 | 5.3075 | 6.9198 | 6.7114 |
| 34 | 0.7113 | 0.7200 | 21.2428 | 1.2786 | 1.0295 |
| 35 | 3.6282 | 1.2932 | 2.0579 | 1.6302 | 1.6302 |
| 36 | 5.9186 | 5.4392 | 5.6658 | 5.4392 | 5.4392 |
| 37 | 1.8822 | 1.6910 | 20.8121 | 1.2489 | 1.0532 |
| 38 | 10.7641 | 0.0966 | 22.2088 | 0.0760 | 0.0966 |
| 39 | 0.6336 | 0.4747 | 21.8053 | 0.5334 | 0.5334 |
| 40 | 0.5525 | 0.2500 | 20.0422 | 0.7332 | 0.7332 |
| 41 | 4.2936 | 4.5829 | 6.5464 | 5.7988 | 5.2712 |
| 42 | 0.4311 | 0.3480 | 22.1219 | 0.3480 | 0.5231 |
| 43 | 7.3737 | 7.5572 | 8.7283 | 7.5083 | 7.5572 |
| 44 | 0.0488 | 0.4478 | 17.6588 | 0.5756 | 0.7164 |
| 45 | 4.3665 | 4.8212 | 4.9057 | 4.8945 | 4.9490 |
| 46 | 8.5651 | 0.2903 | 0.7585 | 0.3222 | 0.2903 |
| 47 | 8.3824 | 7.9125 | 7.8823 | 7.4598 | 7.7639 |
| 48 | 1.4807 | 1.8018 | 7.0569 | 2.4557 | 2.1798 |
| 49 | 0.6611 | 0.5477 | 0.8580 | 0.4113 | 0.3190 |
| 50 | 5.5122 | 0.1284 | 0.1600 | 0.2234 | 0.1284 |
| Images | Otsu | Otsu-Kapur | Shannon2D | Tsallis | Proposed |
|---|---|---|---|---|---|
| 1 | 24.4028 | 20.6494 | 9.1613 | 6.5658 | 13.5576 |
| 2 | 2.6335 | 2.7034 | 3.4067 | 28.2768 | 28.4887 |
| 3 | 25.3066 | 26.5994 | 0.4728 | 0.4745 | 25.0903 |
| 4 | 2.2099 | 2.0973 | 21.7790 | 28.1972 | 25.8268 |
| 5 | 19.6514 | 20.3235 | 0.2688 | 0.2679 | 23.6369 |
| 6 | 19.4818 | 19.4818 | 19.5086 | 19.4818 | 20.0075 |
| 7 | 3.5809 | 29.9699 | 29.9699 | 27.3923 | 28.5733 |
| 8 | 5.3313 | 22.9952 | 17.1198 | 22.5936 | 22.9952 |
| 9 | 29.3248 | 27.1724 | 24.7207 | 24.9539 | 25.5296 |
| 10 | 21.2398 | 21.2398 | 20.1041 | 20.2081 | 21.0849 |
| 11 | 16.3721 | 14.3309 | 12.2365 | 14.3309 | 14.3309 |
| 12 | 16.9161 | 15.1918 | 12.7347 | 14.0417 | 14.0417 |
| 13 | 21.9069 | 17.0987 | 12.5542 | 0.6371 | 17.0987 |
| 14 | 4.2650 | 19.1309 | 15.3857 | 18.8041 | 19.1309 |
| 15 | 19.9912 | 19.4977 | 15.0084 | 15.8254 | 17.7334 |
| 16 | 23.6062 | 23.6062 | 15.9631 | 17.7682 | 21.8623 |
| 17 | 16.5001 | 15.7653 | 12.5471 | 15.4270 | 15.7653 |
| 18 | 3.9349 | 14.8456 | 12.8232 | 16.6430 | 14.8456 |
| 19 | 3.9638 | 3.9638 | 32.7548 | 34.6736 | 36.4345 |
| 20 | 5.6638 | 31.6936 | 30.6145 | 31.4764 | 31.6936 |
| 21 | 21.9069 | 17.0987 | 12.5542 | 0.6371 | 17.0987 |
| 22 | 2.9149 | 16.2726 | 13.2023 | 16.0618 | 16.2726 |
| 23 | 19.9912 | 19.4977 | 15.0084 | 15.8254 | 17.7334 |
| 24 | 23.6062 | 23.6062 | 15.9631 | 17.7682 | 21.8623 |
| 25 | 16.5001 | 15.7653 | 12.5471 | 15.4270 | 15.7653 |
| 26 | 27.6002 | 31.6554 | 21.6728 | 25.8667 | 25.8667 |
| 27 | 16.9925 | 16.6516 | 17.7922 | 16.9925 | 16.6516 |
| 28 | 13.5864 | 12.7288 | 9.3287 | 11.7501 | 12.3330 |
| 29 | 4.0145 | 16.6031 | 14.7356 | 17.8129 | 16.6031 |
| 30 | 3.8442 | 32.0482 | 0.0499 | 30.9402 | 27.2400 |
| 31 | 20.4332 | 19.1545 | 17.0905 | 16.8619 | 17.5713 |
| 32 | 7.2547 | 7.1474 | 0.6125 | 6.9447 | 7.0439 |
| 33 | 5.7238 | 5.5455 | 5.7792 | 5.3433 | 5.4028 |
| 34 | 22.9073 | 22.9930 | 0.3057 | 21.4056 | 22.1574 |
| 35 | 14.0006 | 20.4814 | 17.4554 | 20.0652 | 20.0652 |
| 36 | 10.1444 | 10.7521 | 10.7900 | 10.7521 | 10.7521 |
| 37 | 18.4612 | 19.2256 | 0.4183 | 21.3612 | 21.9652 |
| 38 | 6.0426 | 34.6682 | 0.0101 | 36.1024 | 34.6682 |
| 39 | 21.4843 | 23.8383 | 0.0797 | 24.1388 | 24.1388 |
| 40 | 6.7362 | 7.2601 | 2.9806 | 2.9789 | 8.4326 |
| 41 | 9.3201 | 9.0553 | 6.8620 | 7.7954 | 8.3483 |
| 42 | 22.4005 | 26.2482 | 0.0582 | 26.2482 | 24.0984 |
| 43 | 9.5023 | 9.3082 | 8.1233 | 9.3610 | 9.3082 |
| 44 | 39.6614 | 26.9637 | 1.4516 | 25.5396 | 24.2415 |
| 45 | 11.8090 | 11.2821 | 11.0510 | 11.1858 | 11.1083 |
| 46 | 3.3420 | 25.9106 | 20.8839 | 25.3555 | 25.9106 |
| 47 | 7.4230 | 7.9009 | 7.5796 | 8.3931 | 8.0586 |
| 48 | 17.6259 | 17.1214 | 6.0497 | 14.5537 | 15.6255 |
| 49 | 21.9673 | 23.1828 | 23.3298 | 27.7469 | 29.1127 |
| 50 | 7.5114 | 28.0297 | 28.2257 | 27.2700 | 28.0297 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Q.; Shi, Z.; Ou, C. Self-Adaptive Image Thresholding within Nonextensive Entropy and the Variance of the Gray-Level Distribution. Entropy 2022, 24, 319. https://doi.org/10.3390/e24030319
Deng Q, Shi Z, Ou C. Self-Adaptive Image Thresholding within Nonextensive Entropy and the Variance of the Gray-Level Distribution. Entropy. 2022; 24(3):319. https://doi.org/10.3390/e24030319
Chicago/Turabian StyleDeng, Qingyu, Zeyi Shi, and Congjie Ou. 2022. "Self-Adaptive Image Thresholding within Nonextensive Entropy and the Variance of the Gray-Level Distribution" Entropy 24, no. 3: 319. https://doi.org/10.3390/e24030319
APA StyleDeng, Q., Shi, Z., & Ou, C. (2022). Self-Adaptive Image Thresholding within Nonextensive Entropy and the Variance of the Gray-Level Distribution. Entropy, 24(3), 319. https://doi.org/10.3390/e24030319