
A Novel Method for Fault Diagnosis of Rotating Machinery


Abstract
:1. Introduction
- (1)
- PARCMFDE based on GA is proposed, which overcomes the insufficiency of experience-based parameter selection. PARCMFDE can more accurately extract tiny fault features hidden in vibration signals of rotating machinery.
- (2)
- A fault diagnosis method for rotating machinery based on FIF, PARCMFDE and Fuzzy C-Means (FCM) is proposed, which can classify rotating machinery faults accurately and automatically without depending on the length of data samples.
- (3)
- The effectiveness of the method is verified by the bearing data of Case Western Reserve University and the experimental data of centrifugal pumps obtained by building a water circulation experimental system. Compared with other methods, it shows that feature extraction of PARCMFDE is more accurate and stable, and the rotating machinery fault diagnosis method based on FIF, PARCMFDE and FCM exhibits better classification effect.
2. Fast Iterative Filtering
- (1)
- Calculate the length L of the corresponding filter w of the signal :where N is the total number of sampling points of the signal , k is the number of its extreme points, and is a tuning parameter, which is usually fixed around 1.6 for the Fokker–Plank filter.
- (2)
- Calculate the discrete Fourier transform of the signal and the corresponding filter w, denoted as and ), respectively.
- (3)
- Calculate :
- (4)
- Calculate and :where > 0, represents the required precision; represents the number of iterations required to achieve the required precision when calculating a specific ; represents the kth element of the Fourier transform of the signal s; represents the kth eigenvalue; is the kth eigenvector; I is the identity matrix; D is the diagonal matrix, whose diagonal is the eigenvalue.
- (5)
- Judgment of inner loop stop condition: if the stop standard is met, then stop the inner loop, otherwise let repeat steps (3)–(5), the stop standard is calculated by the following formula:
- (6)
- Calculate the component and the new s:
- (7)
- Judgment of outer loop stop condition: Calculate the extreme point of s, if there is only one extreme point of s or less, the outer loop stops, otherwise repeat steps (1)–(7).
- (8)
- Extract the final IMF component
3. Parameter Adaptive Refined Composite Multiscale Fluctuation Based Dispersion Entropy
3.1. Refined Composite Multiscale Fluctuation-Based Dispersion Entropy
- (1)
- For a given univariate signal . Dividing v into non-overlapping segments of length is called the scale factor. Construct a composite coarse-grained time series:where k represents the coarse-grained sliding number of the scale factor under .
- (2)
- Map to through the normal cumulative distribution function (NCDF) as follows:where is the standard deviation of the time series X and is the mean.
- (3)
- Linearly assign to an integer from 1 to c as follows:
- (4)
- Time series , is the embedding dimension and d is the time delay.
- (5)
- Each time series maps to a fluctuation-based dispersion pattern , where . The number of fluctuation-based dispersion modes assignable to each time series is equal to .
- (6)
- For each fluctuation-based dispersion pattern , the relative frequency is obtained by Equation (12).where # means cardinality.
- (7)
- The Refined Composite Multiscale Fluctuation-based Dispersion Entropy (RCMFDE) is obtained by the following formula:
3.2. Genetic Algorithm
- (1)
- Set the evolutionary generation counter t = 0, set the maximum evolutionary generation T, and randomly generate M individuals as the initial population .
- (2)
- Determine the fitness function and calculate the fitness of each individual in the population .
- (3)
- Apply the selection operator, the crossover operator, and the mutation operator to the population , and then obtain the next generation population .
- (4)
- If , or the change of the fitness function value reaches the given threshold, the optimal fitness individual is used as the optimal solution output. If , and the change of the fitness function value is greater than the given threshold, define , and repeat steps (2)–(4).
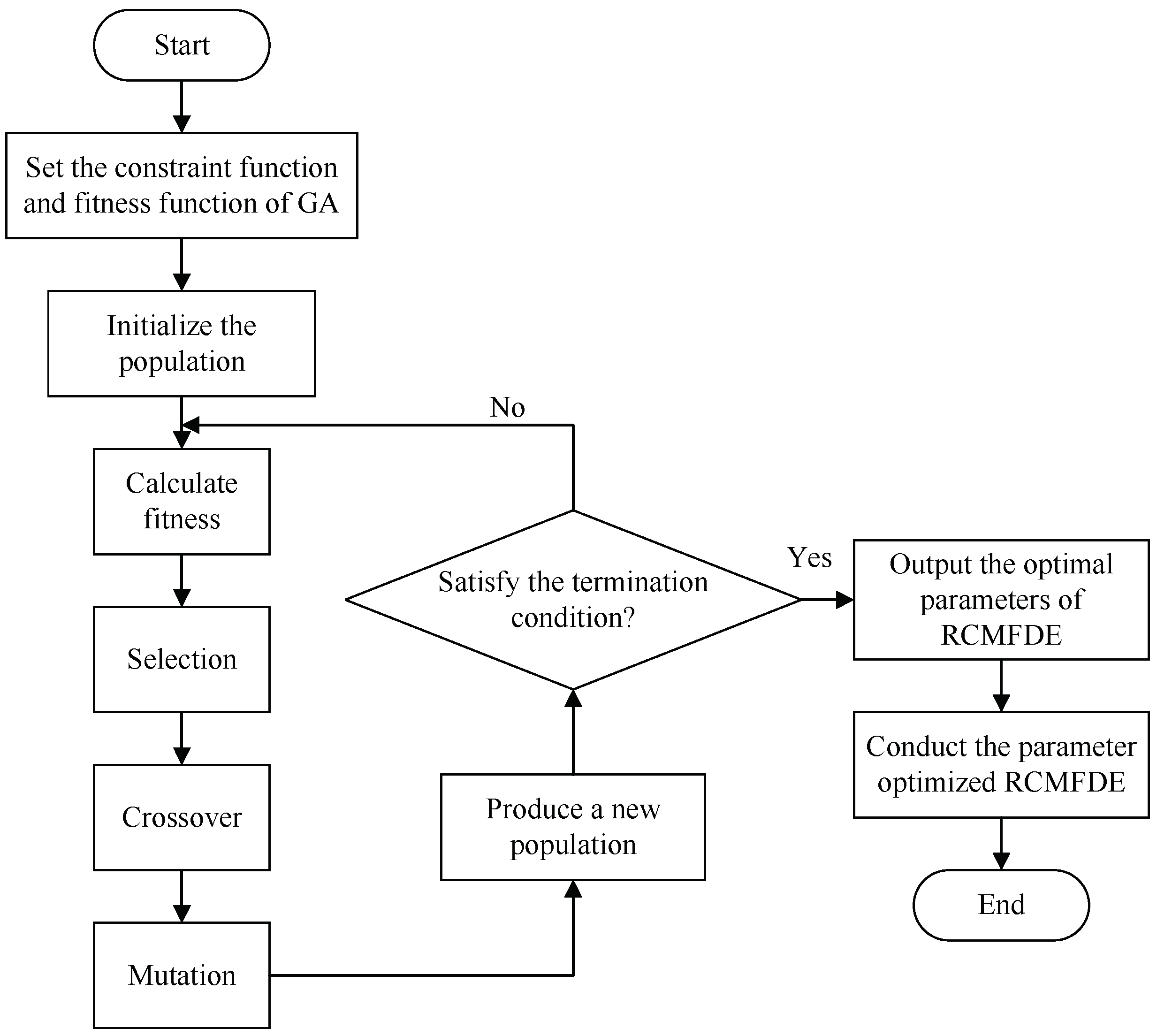
3.3. Parameter Adaptive Refined Composite Multiscale Fluctuation-Based Dispersion Entropy
- (1)
- Determine the approximate range and encoding length of the embedding dimension m and the class number c, and perform real encoding. The constraint function of the parameters is , where L represents the data length, is the maximum scale factor, and represents rounding.
- (2)
- Initialization: Set the evolutionary generation counter , set the maximum evolutionary generation T to 200, and randomly generate M individuals as the initial population .
- (3)
- Calculate the fitness of each individual in the population . Skewness can characterize the overall profile of a set of data. The larger the absolute value of skewness, the more problematic the performance of the mean, and the smaller the absolute value of skewness, the more reliable the mean [25]. Therefore, this paper selects the square function of RCMFDE skewness () as the fitness function and finds its minimum value. The RCMFDE at all scales of the time series are composed of the series , and the skewness () is calculated by the following formula:where is the mean of , is the standard deviation of , and represents the mathematic expectation. The fitness function is taken as .
- (4)
- Apply selection operator, crossover operator and mutation operator to the population. After the population is selected, crossed and mutated, the next generation population is obtained.
- (5)
- Judgment of termination condition: If , or the change of fitness function value is less than , then the individual with the smallest fitness obtained in the evolution process is used as the optimal solution, and the optimal parameter combination m, c is obtained. If , and the change of the fitness function value is greater than , define , and repeat steps (3)–(5).
- (6)
- Use the parameter-optimized RCMFDE to extract the features of the reconstructed rotating machinery vibration signal.
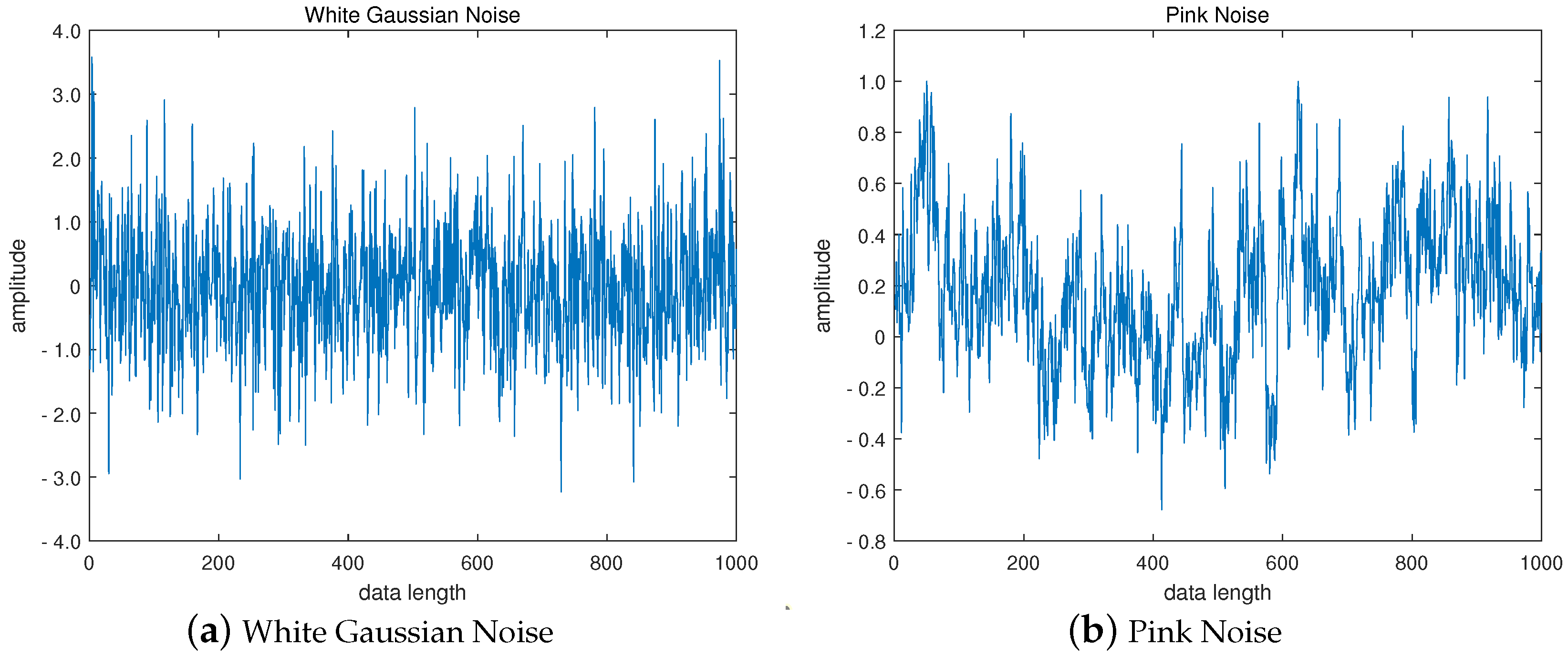
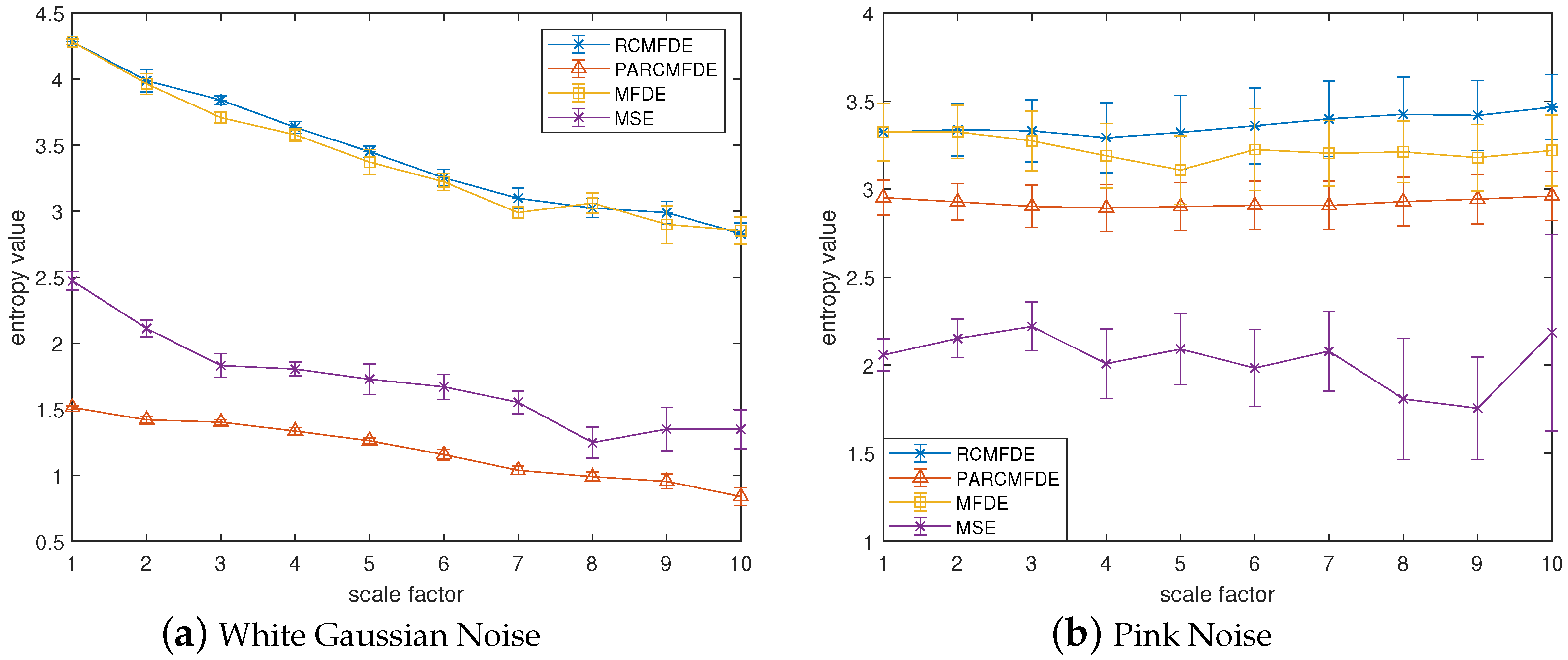
3.4. Error Analysis and Comparison Results
4. Fuzzy C-Means Clustering
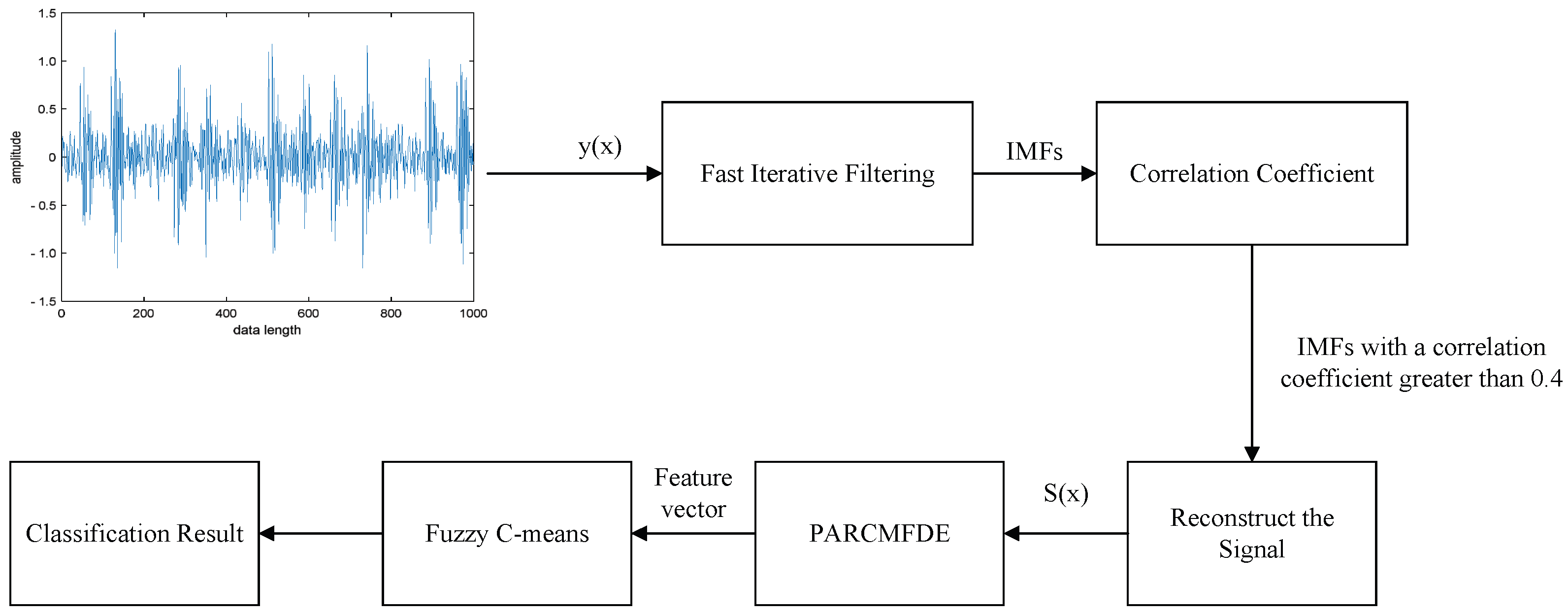
5. Proposed Fault Diagnosis Method
- (1)
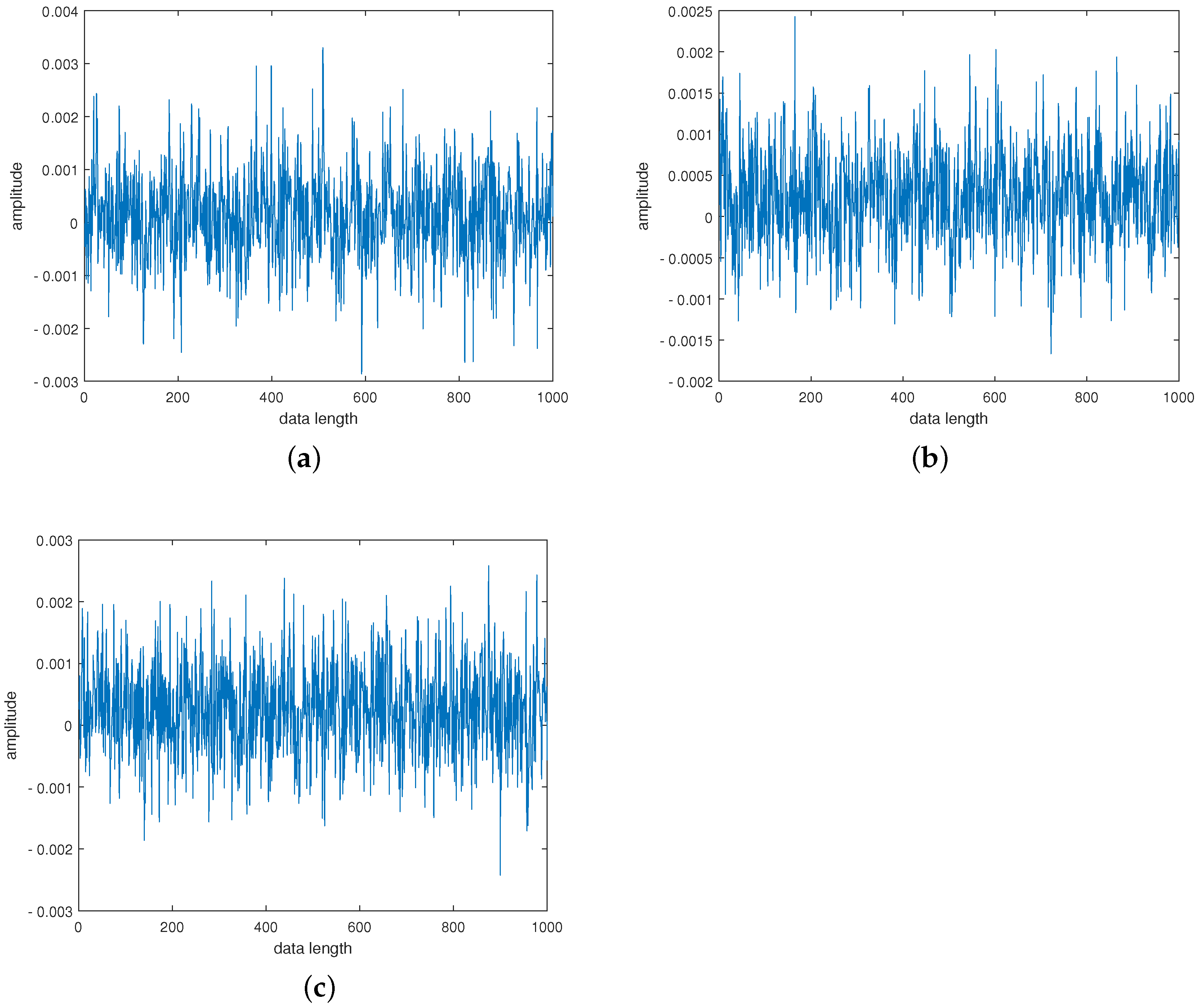
- Use the accelerometer to collect the original vibration signal of the rotating machinery in different states.
- (2)
- The FIF algorithm decomposes the collected vibration signal to obtain a series of IMFs.
- (3)
- Calculate the correlation coefficient of each order IMF, and select components with a correlation coefficient greater than 0.4 for reconstruction.
- (4)
- The PARCMFDE of the reconstructed signal is calculated, and the corresponding entropy value is used as the characteristic information reflecting the working state of the rotating machinery.
- (5)
- Input the training set into FCM to obtain the cluster centers.
- (6)
- Input the testing set and cluster centers into FCM to automatically classify the working state of rotating machinery.
6. Experimental Verification
6.1. Experiment 1: Bearing Data From Cwru
6.1.1. Experimental Setup
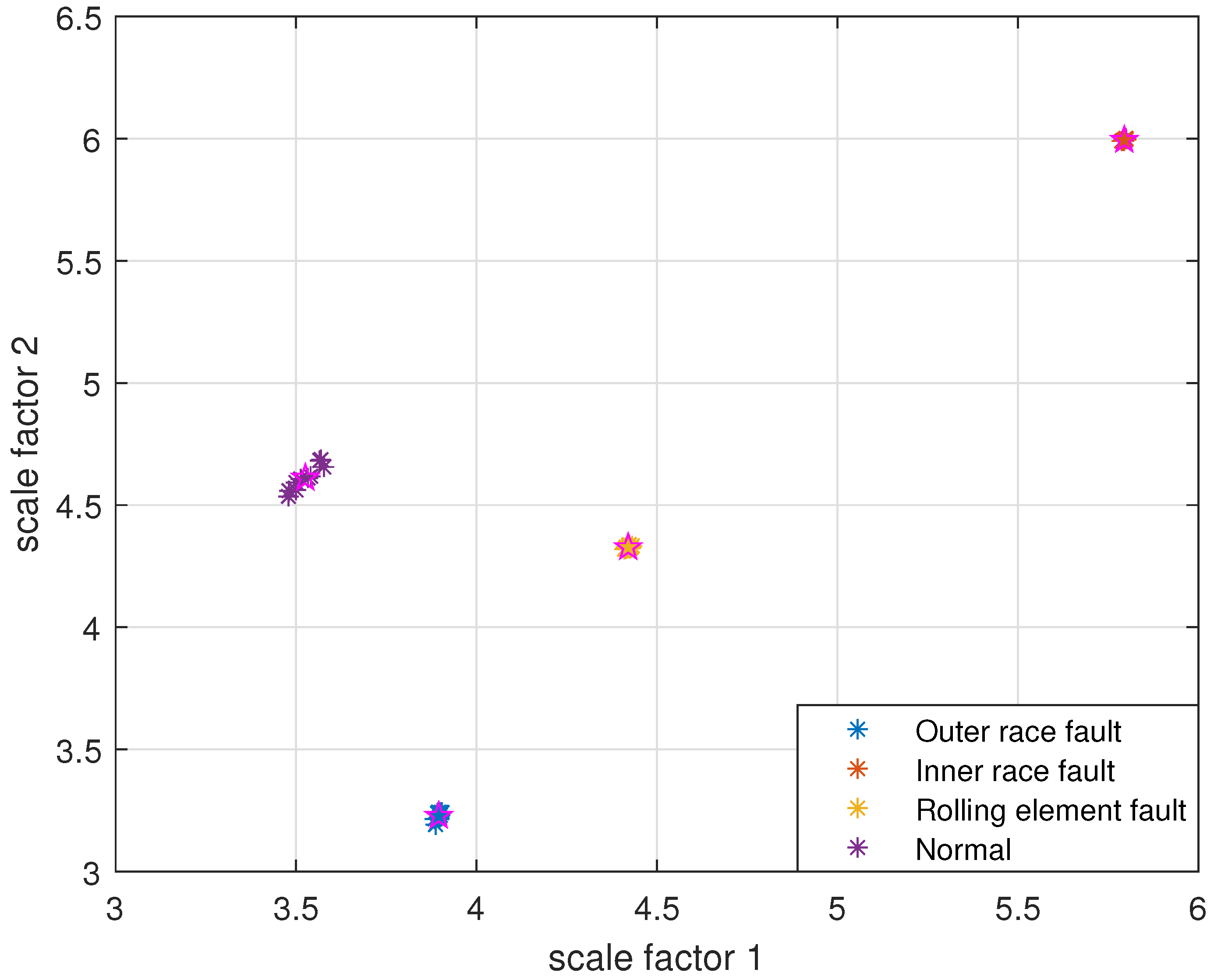
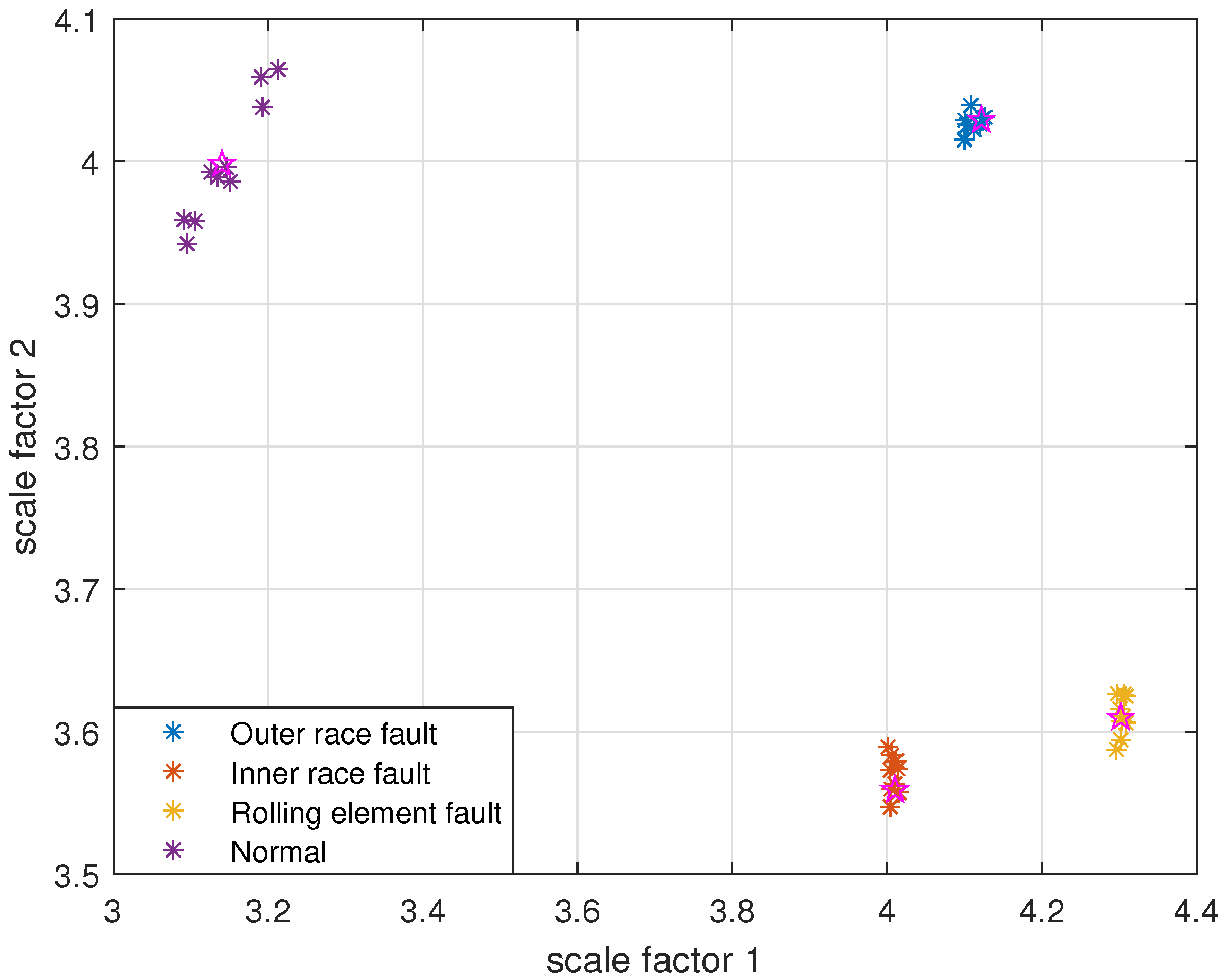
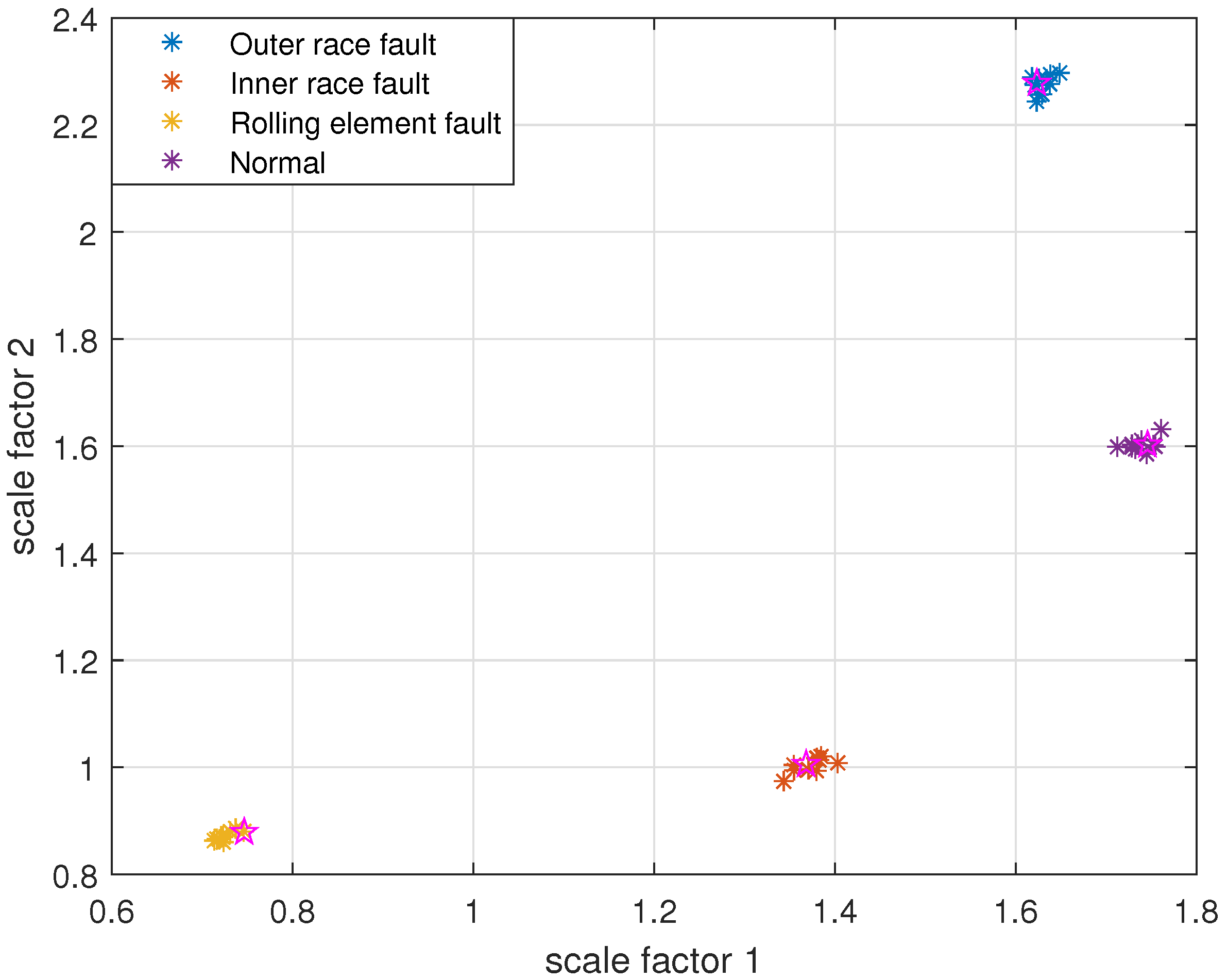
6.1.2. Comparison And Analysis
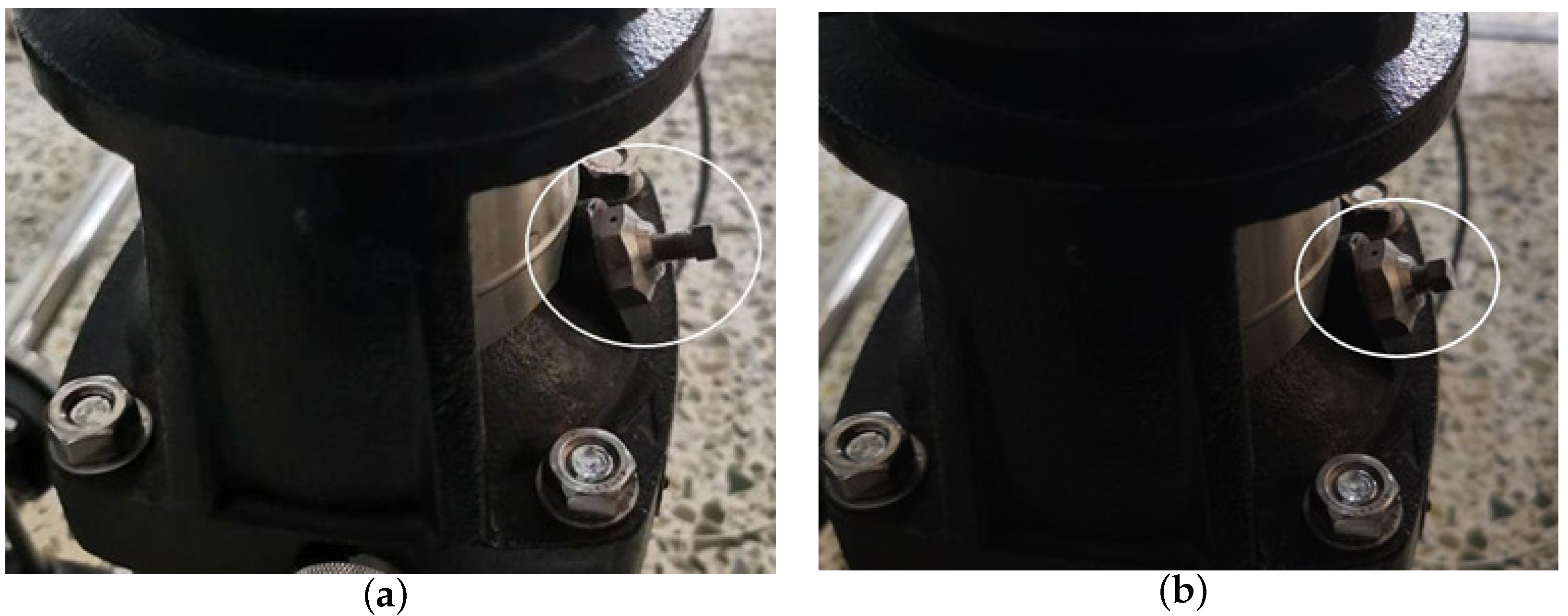
6.2. Experiment 2: Experimental Data of Centrifugal Pump
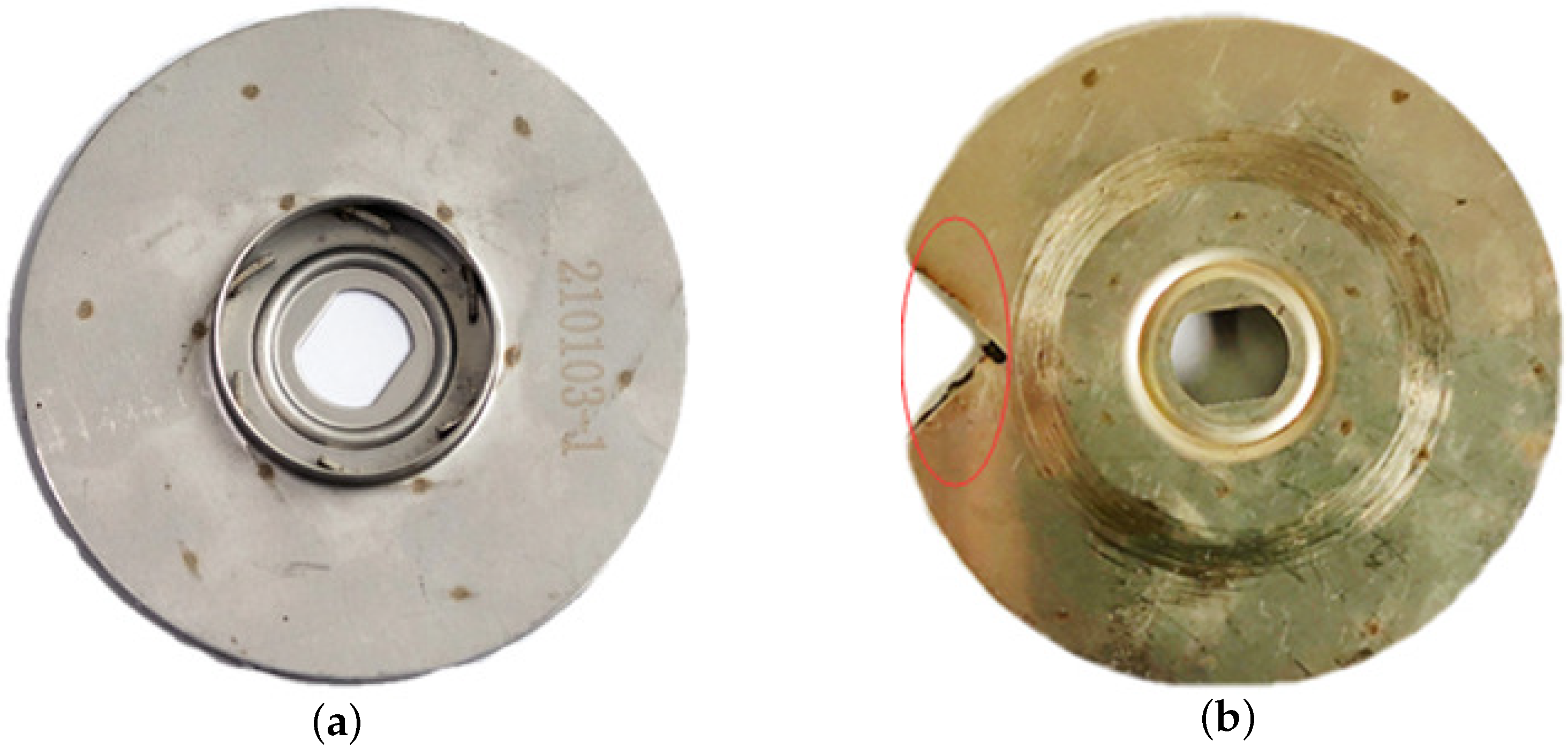
6.2.1. Experimental Setup
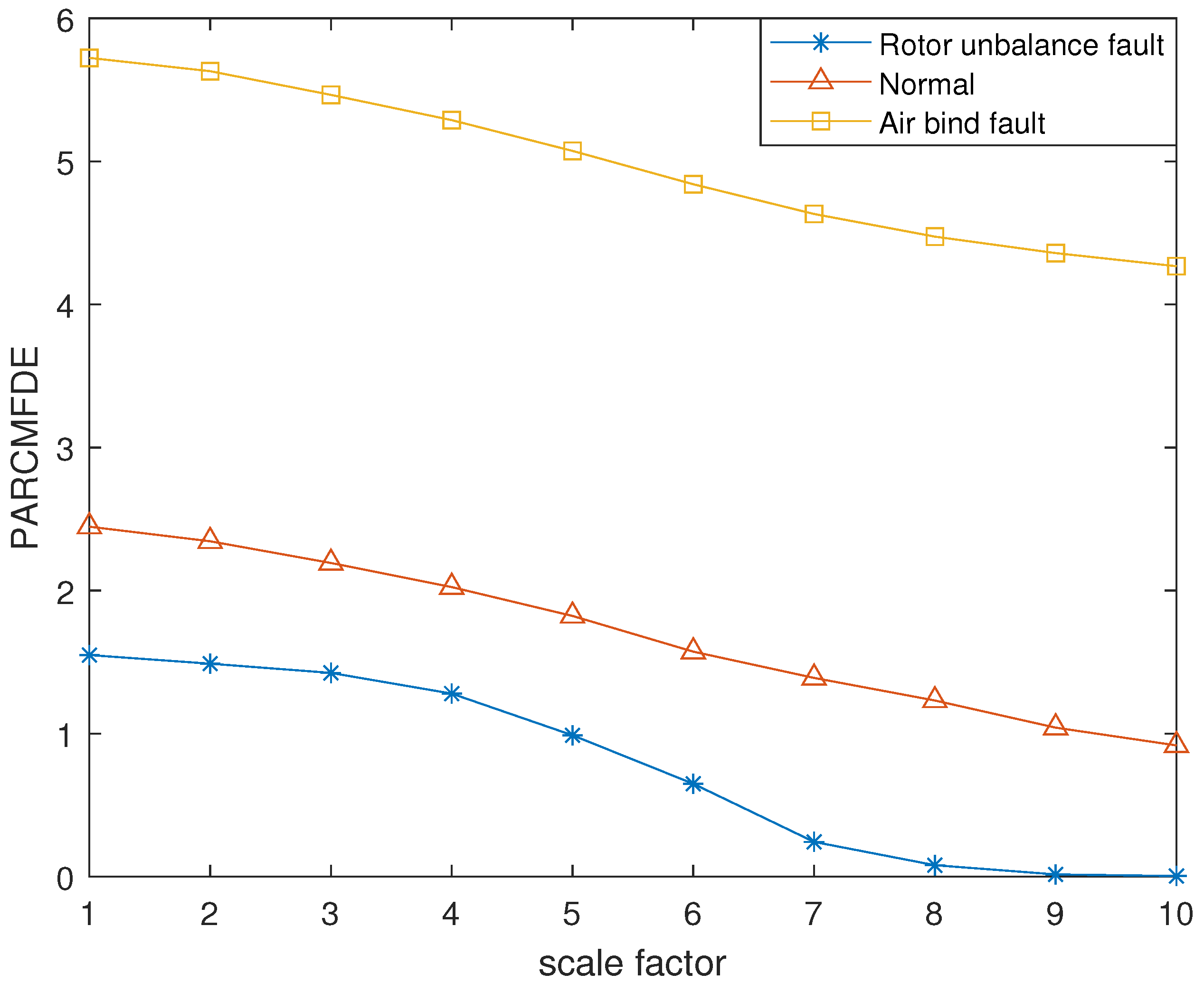
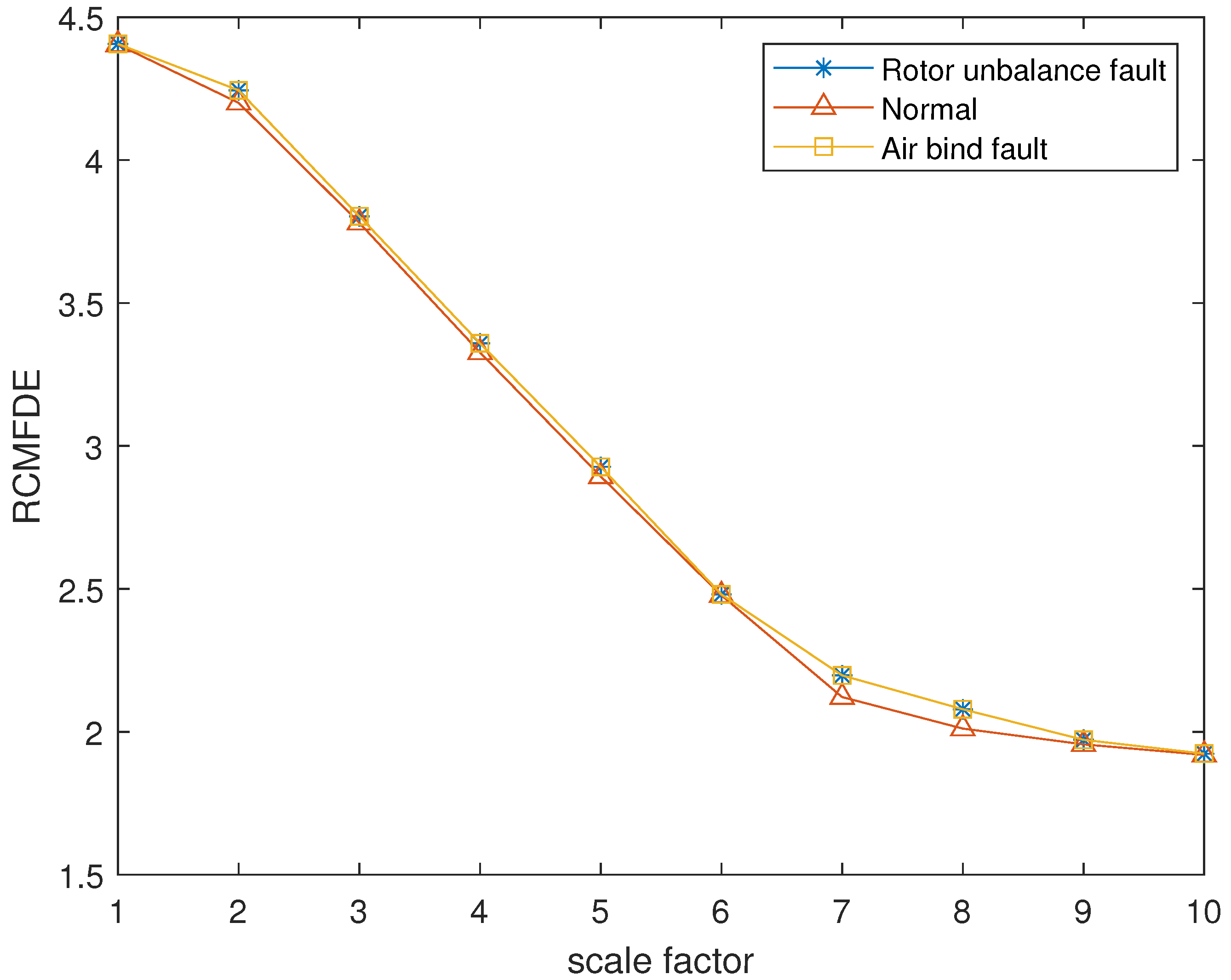
6.2.2. Comparison and Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, R.; Yang, B.; Zio, E.; Chen, X.F. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Peng, B.; Wan, S.; Bi, Y.; Xue, B.; Zhang, M.J. Automatic feature extraction and construction using genetic programming for rotating machinery fault diagnosis. IEEE Trans. Cybern. 2021, 51, 4909–4923. [Google Scholar] [CrossRef]
- Rodriguez, N.; Cabrera, G.; Lagos, C.; Cabrera, E. Stationary Wavelet Singular Entropy and Kernel Extreme Learning for Bearing Multi-Fault Diagnosis. Entropy 2017, 19, 541. [Google Scholar] [CrossRef] [Green Version]
- Cicone, A. Nonstationary signal decomposition for dummies. In Advances in Mathematical Methods and High Performance Computing; Singh, V., Gao, D., Fischer, A., Eds.; Springer: Cham, Switzerland, 2019; pp. 69–82. [Google Scholar]
- Rubini, R.; Meneghetti, U. Application of the envelope and wavelet transform analyses for the diagnosis of incipient faults in ball bearings. Mech. Syst. Signal Process. 2001, 15, 287–302. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Feng, Z.; Zhang, D.; Zuo, M.J. Adaptive mode decomposition methods and their applications in signal analysis for machinery fault diagnosis: A review with examples. IEEE Access 2017, 5, 24301–24331. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, Y.H.; Yeh, C.H.; Young, H.V.; Hu, K.; Lo, M.T. On the computational complexity of the empirical mode decomposition algorithm. Phys. A Stat. Mech. Appl. 2014, 400, 159–167. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Yi, C.; Lv, Y.; Dang, Z. A fault diagnosis scheme for rolling bearing based on particle swarm optimization in variational mode decomposition. Shock Vib. 2016, 2016, 9372691. [Google Scholar] [CrossRef] [Green Version]
- Lin, L.; Wang, Y.; Zhou, H. Iterative filtering as an alternative algotithm for empirical mode decomposition. Adv. Adapt. Data Anal. 2009, 1, 543–560. [Google Scholar] [CrossRef]
- Cicone, A.; Liu, J.; Zhou, H. Adaptive local iterative filtering for signal decomposition and instantaneous frequency analysis. Appl. Comput. Harmon. Anal. 2016, 41, 384–411. [Google Scholar] [CrossRef] [Green Version]
- Cicone, A.; Zhou, H. Numerical analysis for iterative filtering with new efficient implementations based on FFT. Numerische Mathematik 2021, 147, 1–28. [Google Scholar] [CrossRef]
- Xu, Y.; Fan, F.; Jiang, X. A fast iterative filtering decomposition and symmetric difference analytic energy operator for bearing fault extraction. ISA Trans. 2021, 108, 317–332. [Google Scholar] [CrossRef]
- Zhu, K.H.; Chen, L.; Hu, X. Rolling element bearing fault diagnosis by combining adaptive local iterative filtering, Modified Fuzzy Entropy and Support Vector Machine. Entropy 2019, 20, 926. [Google Scholar] [CrossRef] [Green Version]
- Deng, W.; Zhang, S.J.; Zhao, H.M.; Yang, X. A novel fault diagnosis method based on integrating empirical wavelet transform and fuzzy entropy for motor bearing. IEEE Access 2018, 6, 35042–35056. [Google Scholar] [CrossRef]
- Ding, J.; Xiao, D.; Huang, L.; Li, X. Gear fault diagnosis based on VMD sample entropy and discrete hopfield neural network. Math. Probl. Eng. 2020, 2020, 8882653. [Google Scholar] [CrossRef]
- Lv, Y.; Zhang, Y.; Yi, C. Optimized adaptive local iterative filtering algorithm based on permutation entropy for rolling bearing fault diagnosis. Entropy 2018, 20, 920. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Xu, M.; Wang, R.; Huang, W. A fault diagnosis scheme for rolling bearing based on local mean decomposition and improved multiscale fuzzy entropy. J. Sound Vib. 2016, 360, 277–299. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Liu, Z.; Liang, X.; Si, S. The entropy algorithm and its variants in the fault diagnosis of rotating machinery: A review. IEEE Access 2018, 6, 66723–66741. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion entropy: A measure for time-series analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Azami, H.; Arnold, S.E.; Sanei, S.; Chang, Z.; Sapiro, G.; Escudero, J.; Gupta, A.S. Multiscale fluctuation-based dispersion entropy and its applications to neurological diseases. IEEE Access 2019, 7, 68718–68733. [Google Scholar] [CrossRef]
- Kenneth, D.J. Learning with genetic algorithms: An overview. Mach. Learn. 1988, 3, 121–138. [Google Scholar]
- Mardia, K.V. Measures of multivariate skewness and kurtosis with applications. Biometrika 1970, 57, 519–530. [Google Scholar] [CrossRef]
- Gan, X.; Lu, H.; Yang, G.Y. Fault diagnosis method for rolling bearings based on composite multiscale fluctuation dispersion entropy. Entropy 2019, 21, 290. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.A.; Xu, Y.D.; She, D.M.; Zhang, W. A bearing fault diagnosis method based on PAVME and MEDE. Entropy 2021, 23, 1402. [Google Scholar] [CrossRef]
- Cannon, R.L.; Dave, J.V.; Bezdek, J.C. Efficient implementation of the Fuzzy c-Means Clustering algorithms. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 248–255. [Google Scholar] [CrossRef]
- Bezdek, J.C. Cluster validity with fuzzy sets. J. Cybern. 1973, 3, 58–73. [Google Scholar] [CrossRef]
- Bearing Data Center. Case Western Reserve University. Available online: http://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 19 October 2021).
- An, X.; Zeng, H. Demodulation analysis based on adaptive local iterative filtering for bearing fault diagnosis. Measurement 2016, 94, 554–560. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing States | Correlation Coefficients | ||||
|---|---|---|---|---|---|
| IMF 1 | IMF 2 | IMF 3 | IMF 4 | IMF 5 | |
| Normal | 0.62 | 0.653 | 0.3923 | 0.5282 | 0.33 |
| Outer Race Fault | 0.9992 | 0.2421 | 0.0525 | 0.0203 | 0.0117 |
| Inner Race Fault | 0.9057 | 0.5787 | 0.2222 | 0.0509 | 0.0062 |
| Rolling Element Fault | 0.9708 | 0.4376 | 0.2246 | 0.1306 | 0.0661 |
| Bearing Status | Embedding Dimension m | Class Number c |
|---|---|---|
| Outer Race Fault | 2 | 232 |
| Inner Race Fault | 3 | 7 |
| Rolling Element Fault | 3 | 5 |
| Normal | 4 | 4 |
| Algorithms | Classification Coefficient S | Average Fuzzy Entropy E | Classification Accuracy Acc |
|---|---|---|---|
| FIF-PARCMFDE-FCM | 0.9967 | 0.0123 | 100% |
| FIF-RCMFDE-FCM | 0.9935 | 0.0239 | 100% |
| FIF-MSE-FCM | 0.9913 | 0.0306 | 100% |
| States | Correlation Coefficients | ||||
|---|---|---|---|---|---|
| IMF 1 | IMF 2 | IMF 3 | IMF 4 | IMF 5 | |
| Normal | 0.8241 | 0.5885 | 0.3266 | 0.3127 | 0.2019 |
| Air Bind Fault | 0.7979 | 0.5945 | 0.3538 | 0.3561 | 0.2545 |
| Rotor Unbalance Fault | 0.8230 | 0.5870 | 0.3244 | 0.2722 | 0.1289 |
| Status | Embedding Dimension m | Class Number c |
|---|---|---|
| Normal | 2 | 7 |
| Air Bind Fault | 2 | 192 |
| Rotor Unbalance Fault | 2 | 3 |
| Algorithms | Classification Coefficient S | Average Fuzzy Entropy E | Classification Accuracy Acc |
|---|---|---|---|
| FIF-PARCMFDE-FCM | 0.9933 | 0.0215 | 100% |
| FIF-RCMFDE-FCM | 0.7819 | 0.3849 | 57% |
| FIF-MSE-FCM | 0.6313 | 0.5962 | 63% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, M.; Liao, Y.; Luo, F.; Li, X. A Novel Method for Fault Diagnosis of Rotating Machinery. Entropy 2022, 24, 681. https://doi.org/10.3390/e24050681
Tang M, Liao Y, Luo F, Li X. A Novel Method for Fault Diagnosis of Rotating Machinery. Entropy. 2022; 24(5):681. https://doi.org/10.3390/e24050681
Chicago/Turabian StyleTang, Meng, Yaxuan Liao, Fan Luo, and Xiangshun Li. 2022. "A Novel Method for Fault Diagnosis of Rotating Machinery" Entropy 24, no. 5: 681. https://doi.org/10.3390/e24050681
APA StyleTang, M., Liao, Y., Luo, F., & Li, X. (2022). A Novel Method for Fault Diagnosis of Rotating Machinery. Entropy, 24(5), 681. https://doi.org/10.3390/e24050681