
Optimal Performance and Application for Seagull Optimization Algorithm Using a Hybrid Strategy

 ,
, 
Abstract
:1. Introduction
2. The Basic Seagull Optimization Algorithm (SOA)
2.1. Migration Behavior
- (1)
- Avoid the collisions:
- (2)
- Determine the best seagull direction
- (3)
- Move in the direction of the best seagull
2.2. Attack Behavior
| Algorithm 1: SOA |
| Input: Objective function f(x), seagull population size N, dimensional space D, maximum number of iterations T. |
| 1. Initialize population;
2. Set to 2; 3. Set u and v to 1; 4. While t < T 5. for i = 1 : N 6. Calculate seagull migration position by Equation (5); 7. Compute ,,, using Equations (6)–(9); 8. Calculate seagull attack position by Equation (10); 9. Update seagull optimal position ; 10. t = t + 1; 11. end for 12. end while 13. Output the global optimal solution. |
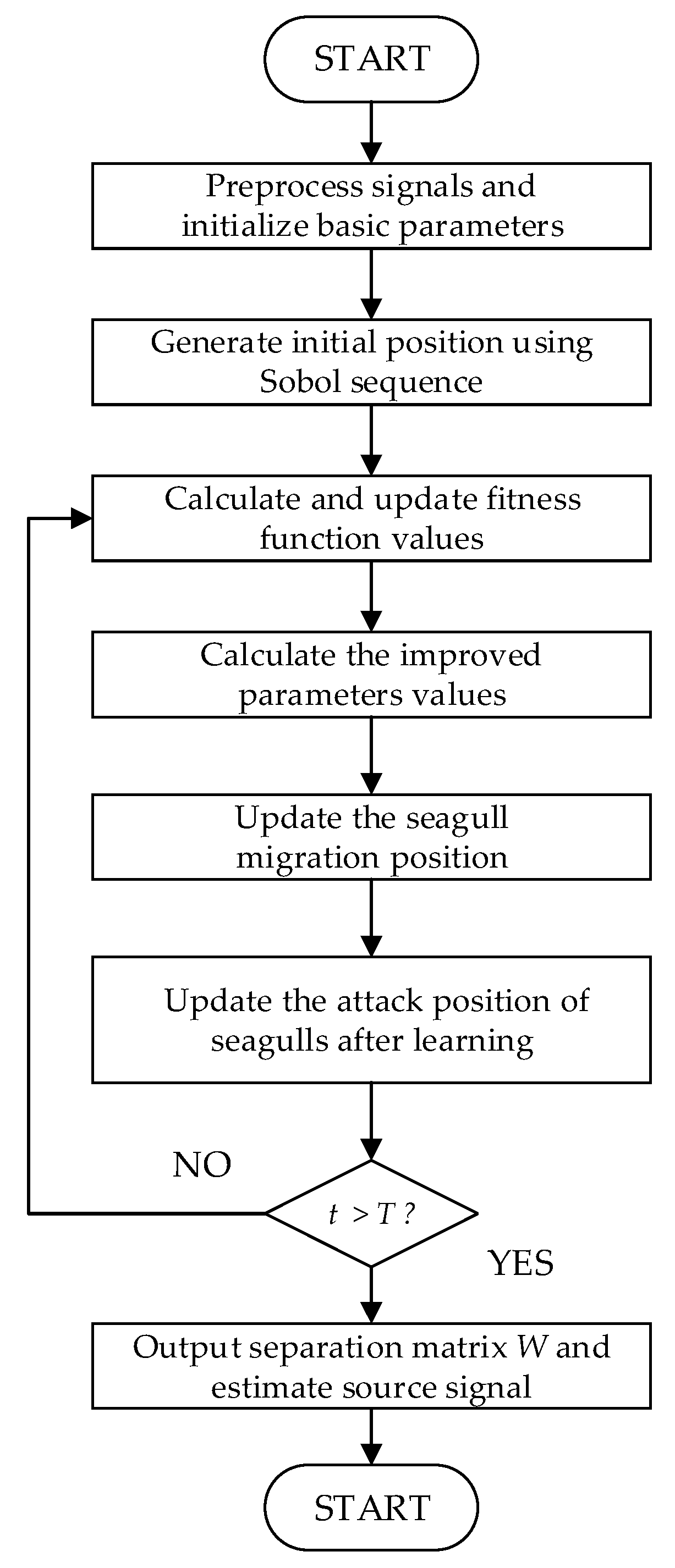
3. SPSOA Search Algorithm
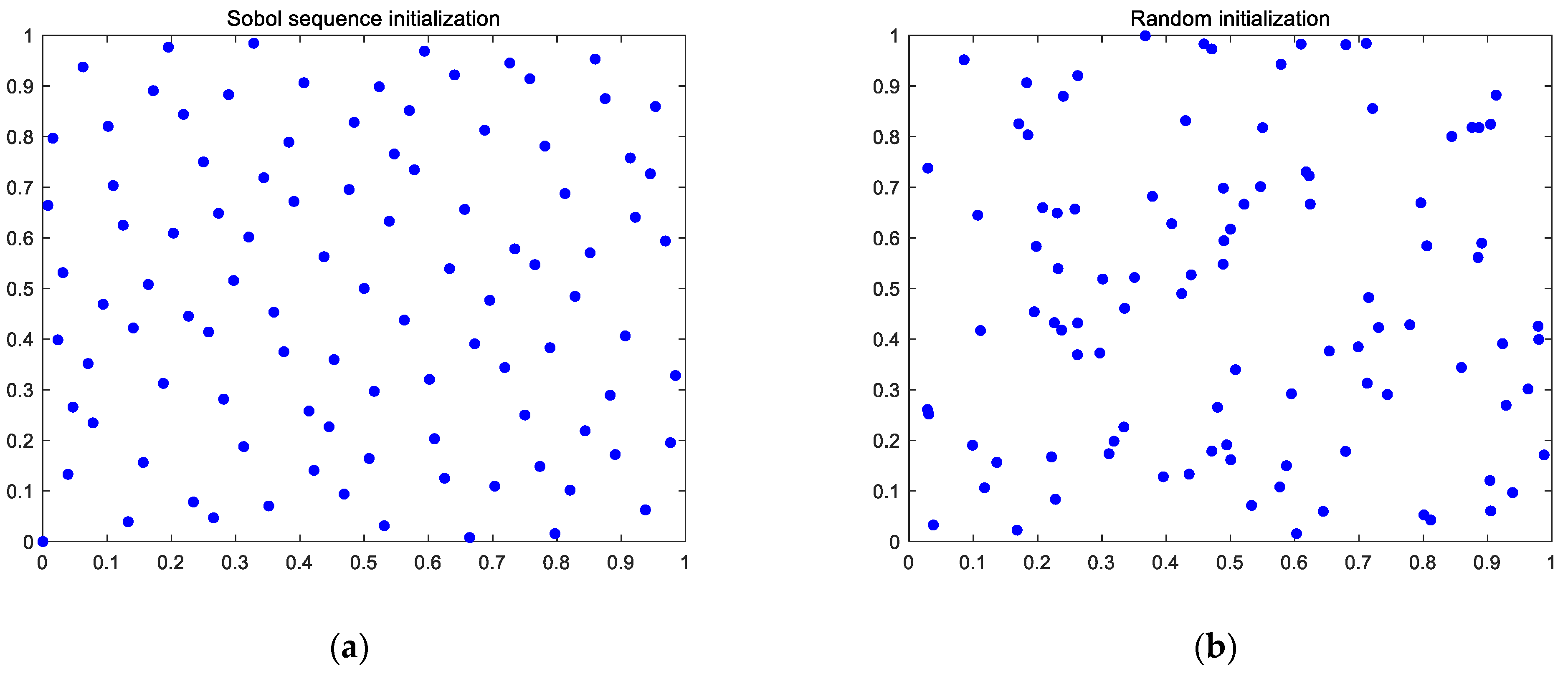
3.1. Sobol Sequence Initialization
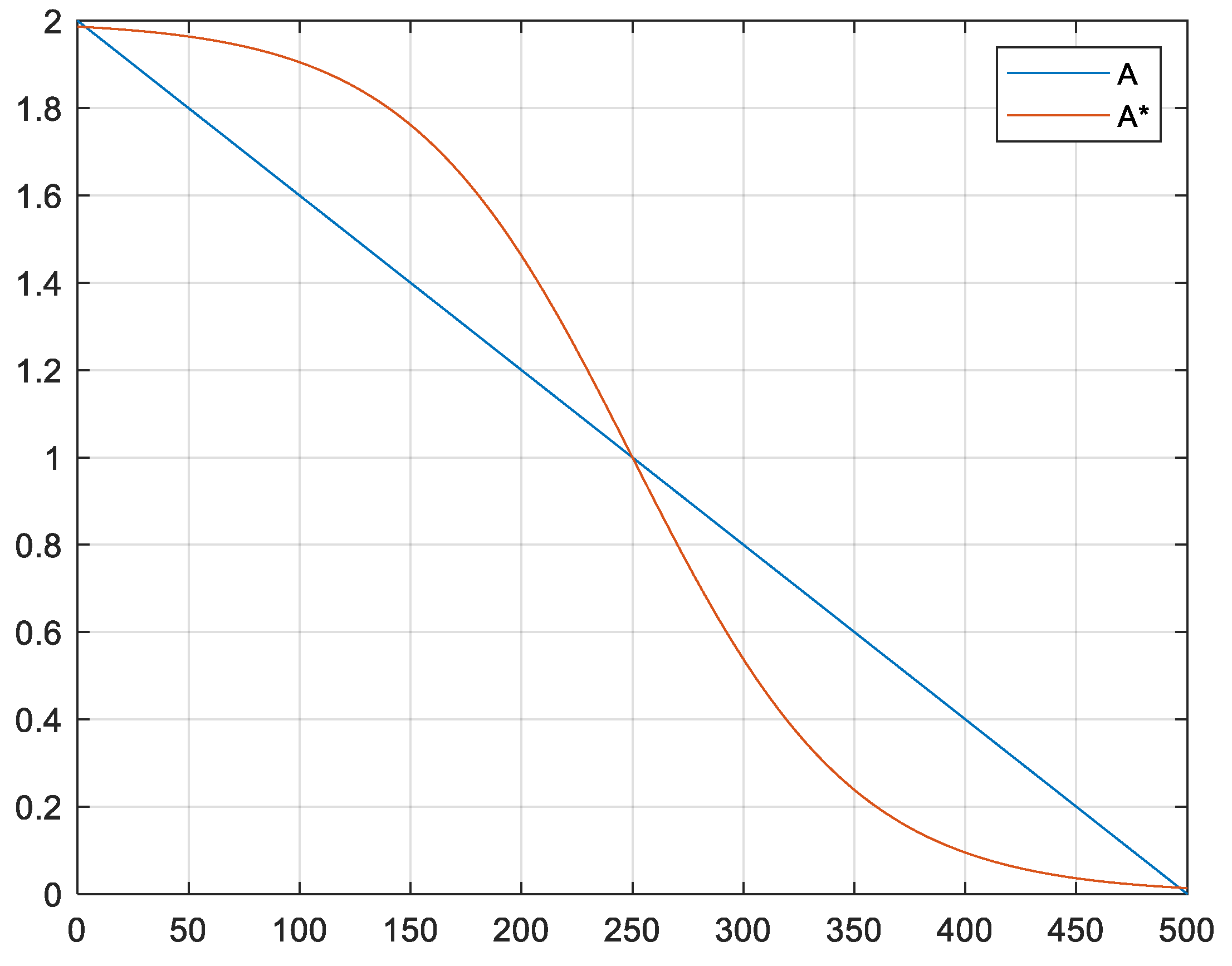
3.2. Improvement of Parameter A
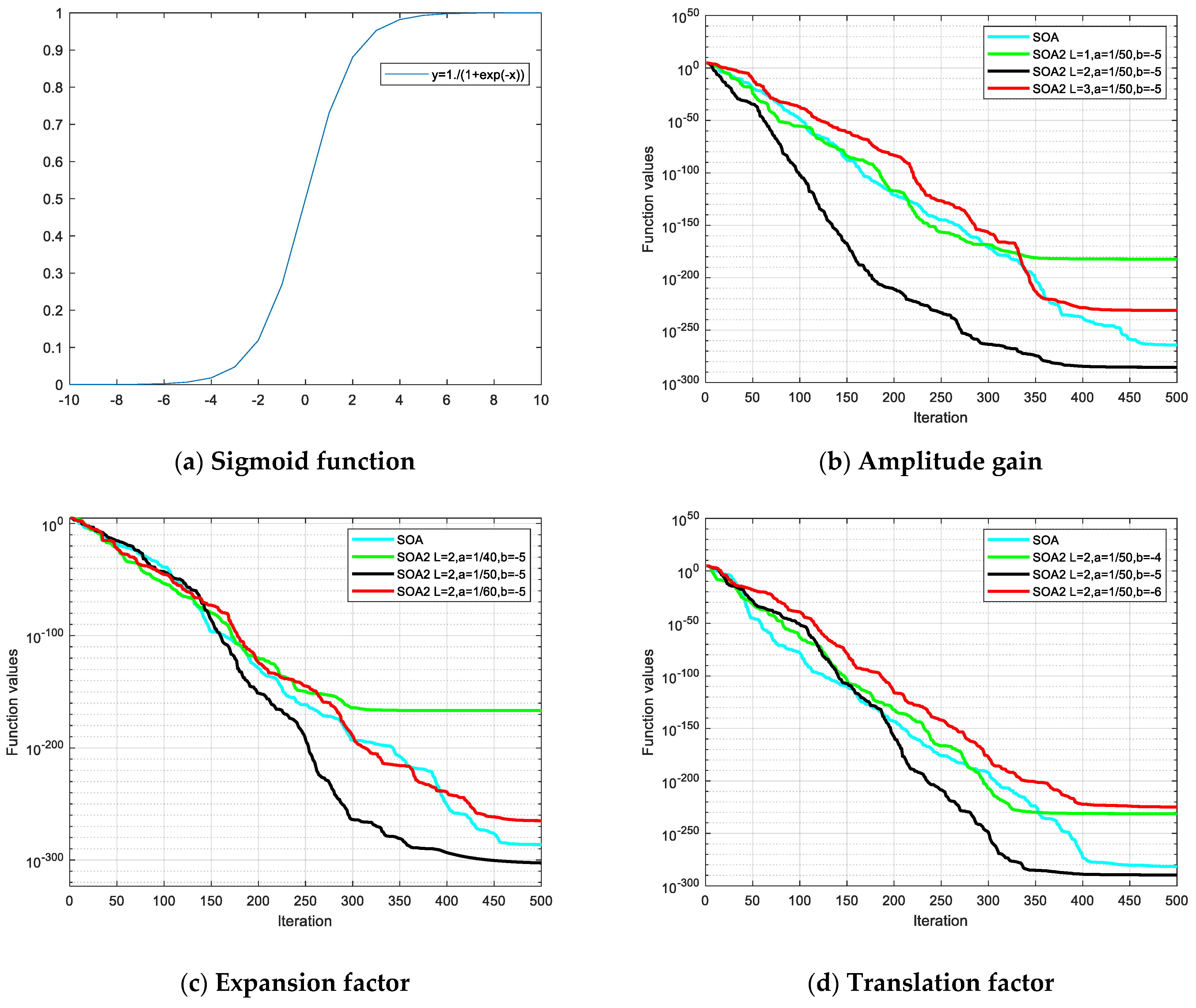
3.3. Improvement of Update Function
| Algorithm 2: SPSOA |
| Input: Objective function f(x), seagull population size N, dimensional space D, maximum number of iterations T, learning factors and |
| 1. Sobol sequence initialize population;
2. Set u and v to 1; 3. While t < T 4. for i = 1 : N 5. Calculate seagull migration position by Equation (5); 6. Compute ,,, using Equations (6)–(9); 7. Calculate seagull attack position by Equation (10); 8. Compute w using Equation (16); 9. Calculate learning location by Equation (15); 10. Update seagull optimal position ; 11. t = t + 1; 12. end for 13. end while 14. Output the global optimal solution. |
3.4. Time Complexity Calculation
4. Simulation and Result Analysis
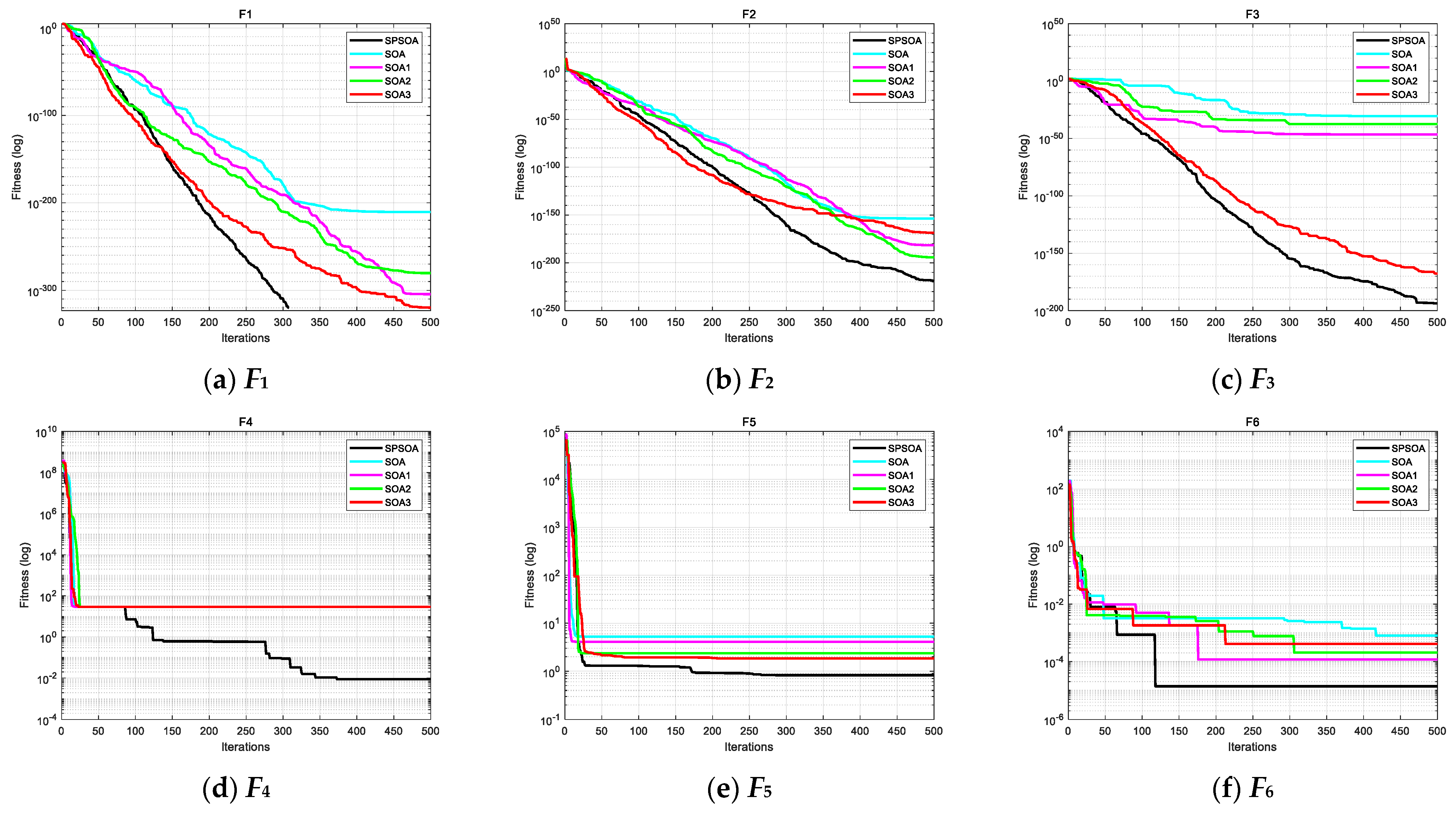
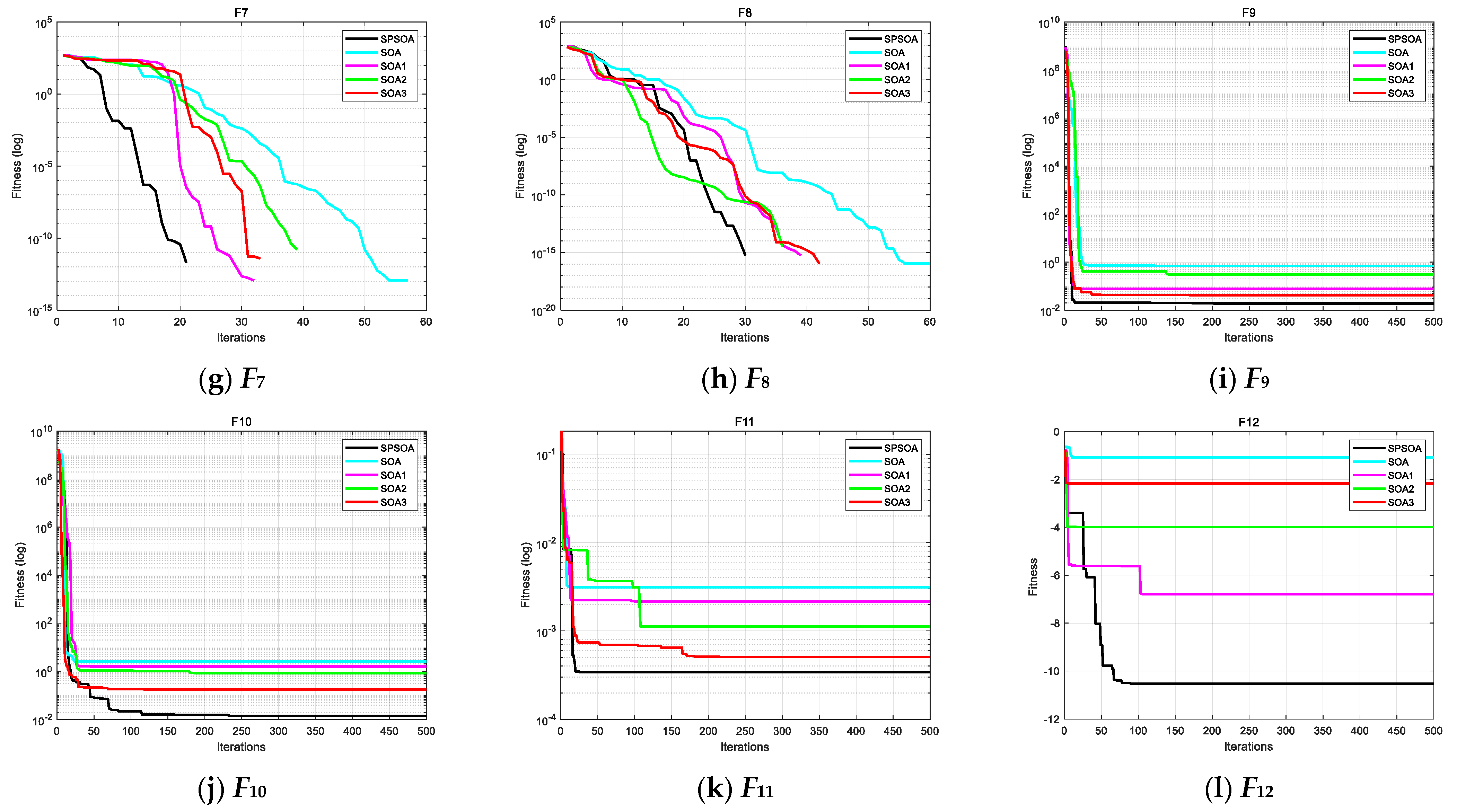
4.1. Effectiveness Analysis of Improvement Strategy
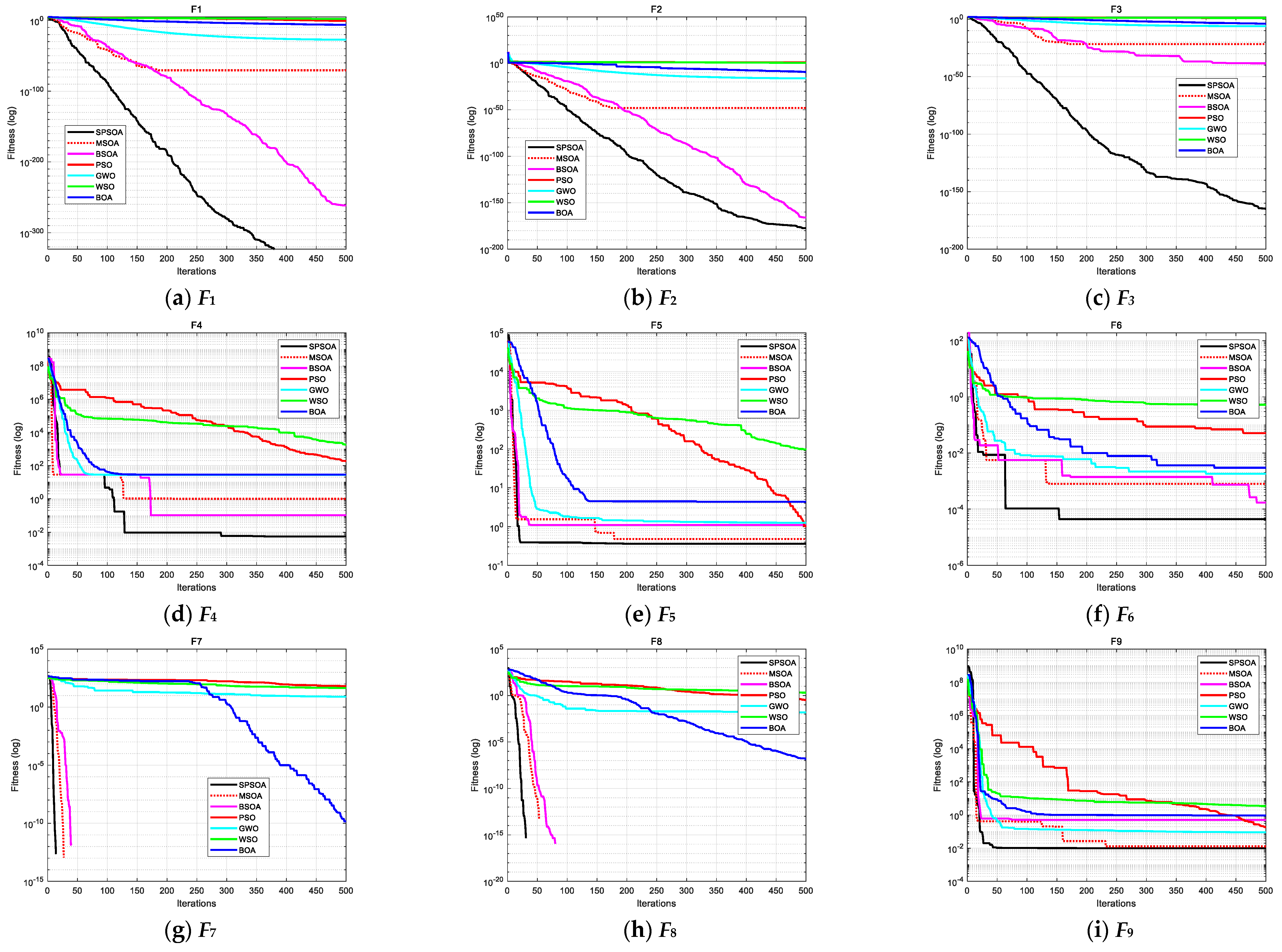
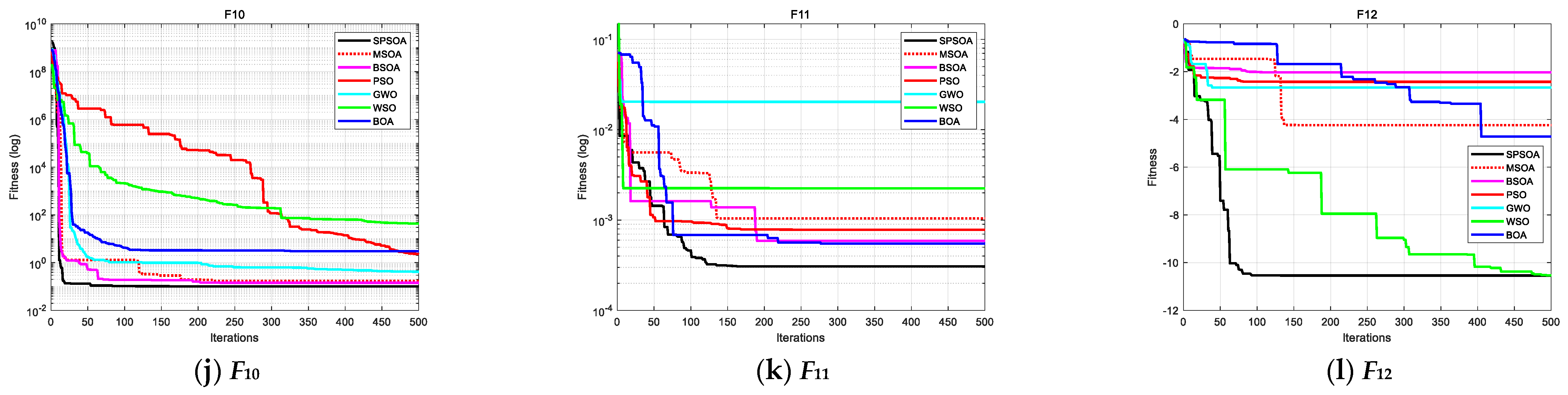
4.2. Comparative Analysis of Algorithm Performance
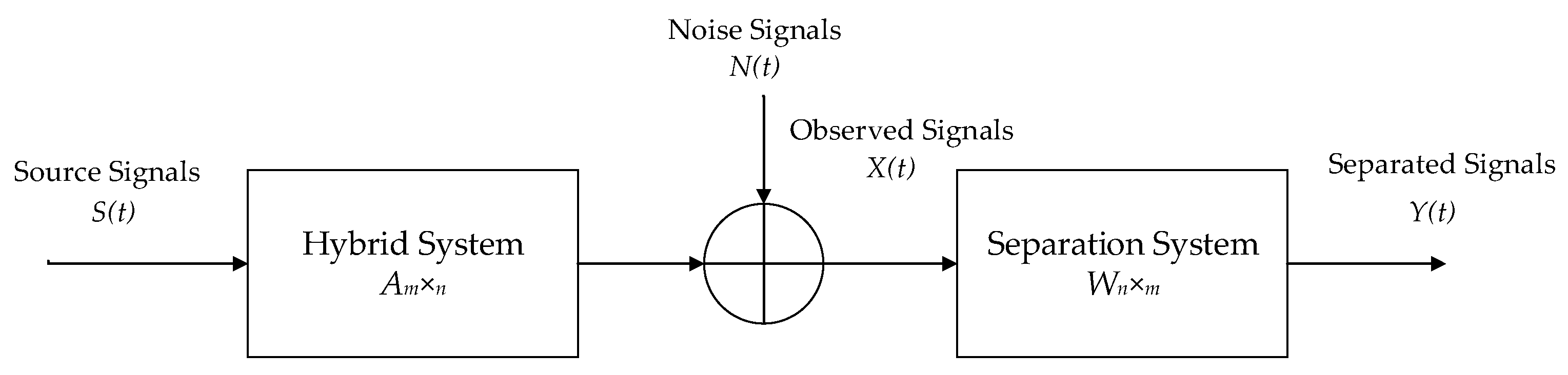
5. Application of SPSOA in Blind Source Separation
5.1. Basic Theory of Blind Source Separation
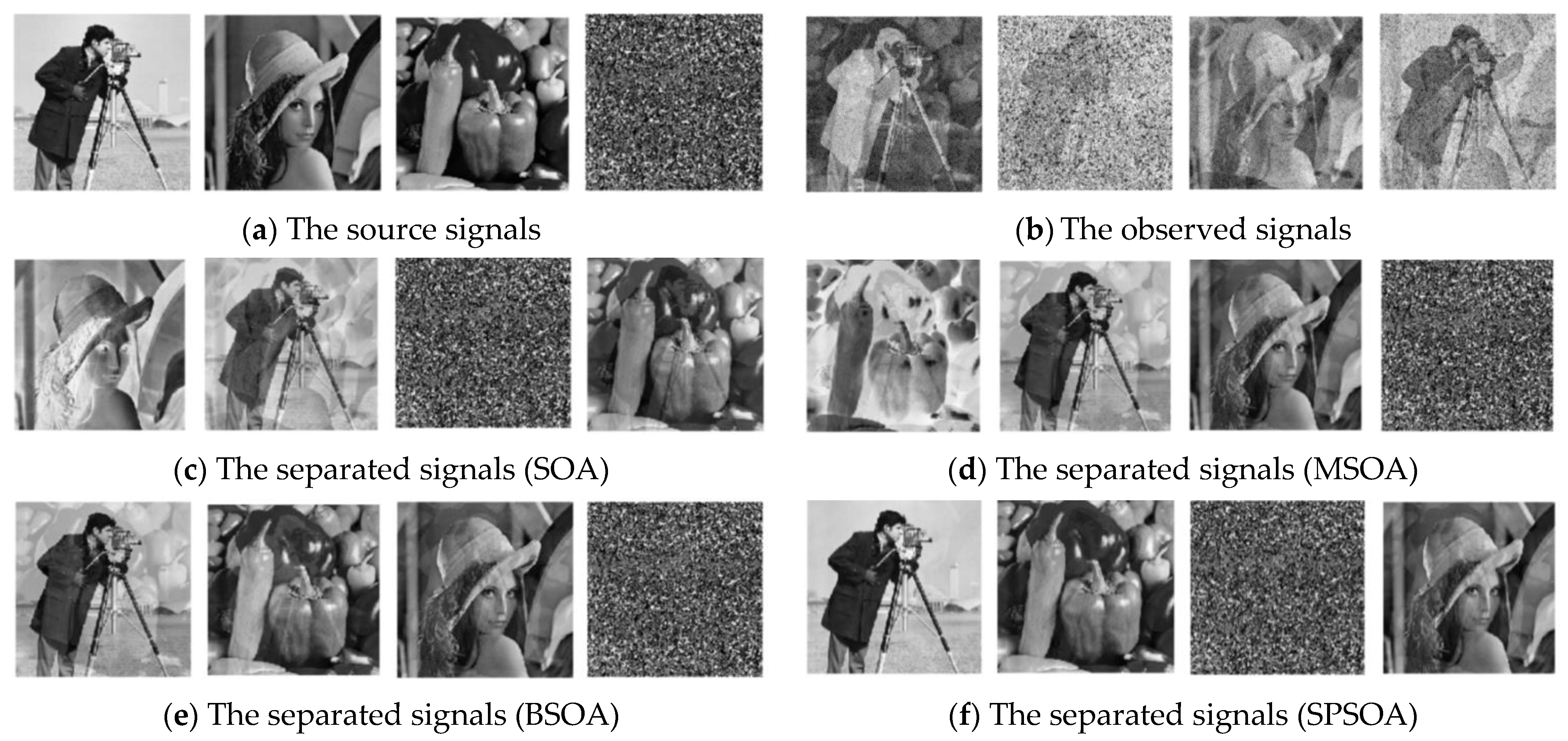
5.2. Image Signal Separation
6. Conclusions and Future Work
- (1)
- When optimizing 12 benchmark functions, SPSOA outperforms the other 6 algorithms. The three improvement methods proposed in this study increased the performance of SOA to varying degrees in the algorithm ablation experiment. All of this demonstrates that SPSOA has a high level of search performance and strong robustness.
- (2)
- In BSS, SPSOA can successfully separate noisy mixed images. In addition, the algorithm is superior to the compared algorithms in the SSIM of output images, similarity coefficient, and PI of separated signals. SPSOA has a broad application prospect in modern signal processing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yang, X. Nature-inspired optimization algorithms: Challenges and open problems. J. Comput. Sci. 2020, 46, 101104. [Google Scholar] [CrossRef] [Green Version]
- Slowik, A.; Kwasnicka, H. Nature inspired methods and their industry applica-tions—Swarm intelligence algorithms. IEEE Trans. Ind. Inform. 2017, 14, 1004–1075. [Google Scholar] [CrossRef]
- Corus, D.; Oliveto, P. Standard Steady State Genetic Algorithms Can Hillclimb Faster than Mutation-only Evolutionary Algorithms. IEEE Trans. Evol. Comput. 2017, 22, 720–732. [Google Scholar] [CrossRef] [Green Version]
- Cai, X.; Zhang, J.; Liang, H.; Wang, L.; Wu, Q. An ensemble bat algorithm for large-scale optimization. Int. J. Mach. Learn. Cybern. 2019, 10, 3099–3113. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.; Vecchi, M. Optimization by Simulated Annealing. Science 1983, 220, 4598. [Google Scholar] [CrossRef]
- Chih, M. Stochastic Stability Analysis of Particle Swarm Optimization with Pseudo Random Number Assignment Strategy. Eur. J. Oper. Res. 2022. [Google Scholar] [CrossRef]
- Dziwinski, P.; Bartczuk, L. A New Hybrid Particle Swarm Optimization and Genetic Algorithm Method Controlled by Fuzzy Logic. IEEE Trans. Fuzzy Syst. 2019, 28, 1140–1154. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Simon, D. Biogeography-Based Optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Zuo, Y.; Fan, Z.; Zou, T.; Wang, P. A Novel Multi-Population Artificial Bee Colony Algorithm for Energy-Efficient Hybrid Flow Shop Scheduling Problem. Symmetry 2021, 13, 2421. [Google Scholar] [CrossRef]
- Ye, S.-Q.; Zhou, K.-Q.; Zhang, C.-X.; Mohd Zain, A.; Ou, Y. An Improved Multi-Objective Cuckoo Search Approach by Exploring the Balance between Development and Exploration. Electronics 2022, 11, 704. [Google Scholar] [CrossRef]
- Yang, X. A New Metaheuristic Bat-Inspired Algorithm. Comput. Knowl. Technol. 2010, 284, 65–74. [Google Scholar]
- Dorigo, M.; Colornj, A. Ant System: Optimization by a Colony of Cooperating Agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [Green Version]
- Dhiman, G.; Kumar, V. Seagull Optimization Algorithm: Theory and its Applications for Large Scale Industrial Engineering Problems. Knowl. Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Dhiman, G.; Singh, K.; Soni, M.; Nagar, A.; Dehghani, M. MOSOA: A New Multi-objective Seagull Optimization Algorithm. Expert Syst. Appl. 2020, 167, 114150. [Google Scholar] [CrossRef]
- Abdelhamid, M.; Houssein, E.; Mahdy, M.; Selim, A.; Kamel, S. An improved seagull optimization algorithm for optimal coordination of distance and directional over-current relays. Expert Syst. Appl. 2022, 200, 116931. [Google Scholar] [CrossRef]
- Long, W.; Jiao, J.; Liang, X.; Xu, M.; Tang, M.; Cai, S. Parameters estimation of photovoltaic models using a novel hybrid seagull optimization algorithm. Energy 2022, 249, 123760. [Google Scholar] [CrossRef]
- Che, Y.; He, D. An enhanced seagull optimization algorithm for solving engineering optimization problems. Appl. Intell. 2022, 1–39. [Google Scholar] [CrossRef]
- Zhu, J.; Li, S.; Liu, Y.; Dong, H. A Hybrid Method for the Fault Diagnosis of Onboard Traction Transformers. Electronics 2022, 11, 762. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, X.; Zhang, Y.; Zhong, X.; Cheng, L. A Power Transformer Fault Diagnosis Method-Based Hybrid Improved Seagull Optimization Algorithm and Support Vector Machine. IEEE Access 2021, 10, 17268–17286. [Google Scholar] [CrossRef]
- Muthubalaji, S.; Srinivasan, S.; Lakshmanan, M. IoT based energy management in smart energy system: A hybrid SO2SA technique. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 34, e2893. [Google Scholar] [CrossRef]
- Hu, W.; Zhang, X.; Zhu, L.; Li, Z. Short-Term Photovoltaic Power Prediction Based on Similar Days and Improved SOA-DBN Model. IEEE Access 2020, 9, 1958–1971. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Gang, H. Hybrid seagull optimization algorithm and its engineering application integrating Yin–Yang Pair idea. Eng. Comput. 2022, 38, 2821–2857. [Google Scholar] [CrossRef]
- Ewees, A.; Mostafa, R.; Ghoniem, R.; Gaheen, M. Improved seagull optimization algorithm using Levy flight and mutation operator for feature selection. Neural Comput. Appl. 2022, 34, 7437–7472. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Ahmad, I.; Tag-Eldin, E. Multi-Objective Quantum-Inspired Seagull Optimization Algorithm. Electronics 2022, 11, 1834. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. Open Access J. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Dokeroglu, T.; Sevinc, E.; Kucukyilmaz, T.; Cosar, A. A survey on new generation metaheuristic algorithms. Comput. Ind. Eng. 2019, 137, 106040. [Google Scholar] [CrossRef]
- Zhang, M.; Long, D.; Qin, T.; Yang, J. A Chaotic Hybrid Butterfly Optimization Algorithm with Particle Swarm Optimization for High-Dimensional Optimization Problems. Symmetry 2020, 12, 1800. [Google Scholar] [CrossRef]
- Wang, T.; Wu, K.; Du, T.; Cheng, X. Adaptive Dynamic Disturbance Strategy for Differential Evolution Algorithm. Appl. Sci. 2020, 10, 1972. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Meng, W.; Yang, Q. Electricity Substitution Potential Prediction Based on Tent-CSO-CG-SSA-Improved SVM—A Case Study of China. Sustainability 2022, 14, 853. [Google Scholar] [CrossRef]
- Luo, W.; Jin, H.; Li, H.; Fang, X.; Zhou, R. Optimal Performance and Application for Firework Algorithm Using a Novel Chaotic Approach. IEEE Access 2020, 8, 120798–120817. [Google Scholar] [CrossRef]
- Huang, H.; Chung, C.; Chan, K.; Chen, H. Quasi-Monte Carlo Based Probabilistic Small Signal Stability Analysis for Power Systems With Plug-In Electric Vehicle and Wind Power Integration. IEEE Trans. Power Syst. 2013, 28, 3335–3343. [Google Scholar] [CrossRef]
- Joe, S.; Kuo, F. Remark on Algorithm 659: Implementing Sobol’s Quasirandom Sequence Generator. ACM Transactions. Math. Softw. 2003, 29, 49–57. [Google Scholar] [CrossRef]
- Kurt, E.; Basbug, S.; Guney, K. Linear Antenna Array Synthesis by Modified Seagull Optimization Algorithm. Appl. Comput. Electromagn. Soc. J. 2021, 36, 1552–1561. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Y.; Zhang, G.; Jermsittiparsert, K.; Razmjooy, N. Experimental Modeling of PEM Fuel Cells Using A New Improved Seagull Optimization Algorithm. Energy Rep. 2019, 5, 1616–1625. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Braik, M.; Hammouri, A.; Atwan, J.; Al-Betar, M.A.; Awadallah, M.A. White Shark Optimizer: A Novel Bio-inspired Meta-heuristic Algorithm for Global Optimization Problems. Knowl. Based Syst. 2022, 243, 108457. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly Optimization Algorithm: A Novel Approach for Global Optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Gao, J.; Zhu, X.; Nandi, A. Independent Component Analysis for Multiple-Input Multiple-Output Wireless Communication Systems. Signal Process. 2011, 91, 607–623. [Google Scholar] [CrossRef]
- Xia, Q.; Ding, Y.; Zhang, R.; Liu, M.; Zhang, H.; Dong, X. Blind Source Separation Based on Double-Mutant Butterfly Optimization Algorithm. Sensors 2022, 22, 3979. [Google Scholar] [CrossRef] [PubMed]
- Comon, P. Independent Component Analysis, A New Concept? Signal Process. 1994, 36, 287–314. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Dim | Scope | fmin |
|---|---|---|---|
| 30 | [−100,100] | 0 | |
| 30 | [−10,10] | 0 | |
| 30 | [−100,100] | 0 | |
| 30 | [−30,0] | 0 | |
| 30 | [−100,100] | 0 | |
| 30 | [−1.28,1.28] | 0 | |
| 30 | [−5.12,5.12] | 0 | |
| 30 | [−600,600] | 0 | |
| 30 | [−50,50] | 0 | |
| 30 | [−50,50] | 0 | |
| 4 | [−5,5] | 0.00030 | |
| 4 | [0,10] | −10.5363 |
| Function | Index | SPSOA | SOA | SOA1 | SOA2 | SOA3 |
|---|---|---|---|---|---|---|
| F1 | BEST | 0 | 0 | 0 | 0 | 0 |
| WORST | 1.94 × 10−245 | 1.35 × 10−192 | 3.19 × 10−237 | 5.12 × 10−217 | 4.40 × 10−241 | |
| MEAN | 2.84 × 10−247 | 3.84 × 10−194 | 1.01 × 10−239 | 1.38 × 10−219 | 4.78 × 10−243 | |
| STD | 0 | 0 | 0 | 0 | 0 | |
| F2 | BEST | 8.24 × 10−259 | 2.42 × 10−184 | 6.89 × 10−221 | 4.00 × 10−210 | 7.87 × 10−240 |
| WORST | 2.77 × 10−172 | 3.86 × 10−133 | 6.75 × 10−168 | 8.78 × 10−137 | 1.31 × 10−152 | |
| MEAN | 4.24 × 10−173 | 3.33 × 10−135 | 1.33 × 10−169 | 6.08 × 10−139 | 1.01 × 10−154 | |
| STD | 0 | 3.58 × 10−134 | 0 | 5.88 × 10−138 | 7.08 × 10−153 | |
| F3 | BEST | 6.90 × 10−248 | 1.72 × 10−59 | 1.61 × 10−62 | 2.09 × 10−60 | 4.50 × 10−234 |
| WORST | 2.81 × 10−118 | 2.86 × 10−8 | 1.40 × 10−9 | 6.76 × 10−11 | 1.00 × 10−117 | |
| MEAN | 1.39 × 10−119 | 9.58 × 10−10 | 4.78 × 10−11 | 2.28 × 10−12 | 3.35 × 10−119 | |
| STD | 1.62 × 10−118 | 5.23 × 10−9 | 2.56 × 10−10 | 1.23 × 10−11 | 2.83 × 10−118 | |
| F4 | BEST | 6.30 × 10−4 | 28.7313 | 28.7208 | 28.7117 | 28.7098 |
| WORST | 28.8408 | 28.9163 | 28.9036 | 28.9134 | 28.8763 | |
| MEAN | 20.2261 | 28.8028 | 28.7897 | 28.7927 | 28.7825 | |
| STD | 10.2558 | 0.0395 | 0.0364 | 0.0388 | 0.0352 | |
| F5 | BEST | 0.0115 | 0.8335 | 0.5901 | 0.3125 | 0.0218 |
| WORST | 3.0266 | 5.0777 | 4.6241 | 4.3920 | 4.0115 | |
| MEAN | 1.3783 | 2.5841 | 2.5029 | 2.4464 | 1.4107 | |
| STD | 0.9106 | 1.4569 | 0.9351 | 1.3293 | 1.3016 | |
| F6 | BEST | 2.89 × 10−7 | 9.43 × 10−5 | 5.92 × 10−6 | 3.78 × 10−5 | 1.86 × 10−6 |
| WORST | 4.42 × 10−4 | 0.0031 | 8.08 × 10−4 | 0.0018 | 5.32 × 10−4 | |
| MEAN | 1.88 × 10−4 | 7.57 × 10−4 | 2.23 × 10−4 | 6.01 × 10−4 | 2.67 × 10−4 | |
| STD | 1.12 × 10−4 | 7.37 × 10−4 | 2.04 × 10−4 | 4.65 × 10−4 | 1.47 × 10−4 | |
| F7 | BEST | 0 | 0 | 0 | 0 | 0 |
| WORST | 0 | 0 | 0 | 0 | 0 | |
| MEAN | 0 | 0 | 0 | 0 | 0 | |
| STD | 0 | 0 | 0 | 0 | 0 | |
| F8 | BEST | 0 | 0 | 0 | 0 | 0 |
| WORST | 0 | 0 | 0 | 0 | 0 | |
| MEAN | 0 | 0 | 0 | 0 | 0 | |
| STD | 0 | 0 | 0 | 0 | 0 | |
| F9 | BEST | 3.85 × 10−4 | 0.0201 | 0.0021 | 0.0166 | 7.44 × 10−4 |
| WORST | 0.1239 | 1.3573 | 0.7825 | 0.7481 | 0.5928 | |
| MEAN | 0.0425 | 0.3687 | 0.3507 | 0.2640 | 0.0964 | |
| STD | 0.0364 | 0.2880 | 0.2364 | 0.2009 | 0.1321 | |
| F10 | BEST | 1.21 × 10−5 | 0.1531 | 0.0869 | 0.1195 | 8.17 × 10−4 |
| WORST | 1.5300 | 2.5146 | 2.2179 | 2.4815 | 1.6547 | |
| MEAN | 0.3992 | 1.2135 | 0.8381 | 1.1573 | 0.5003 | |
| STD | 0.4592 | 0.6591 | 0.4602 | 0.6372 | 0.4570 | |
| F11 | BEST | 3.09 × 10−4 | 3.73 × 10−4 | 3.39 × 10−4 | 3.31 × 10−4 | 3.13 × 10−4 |
| WORST | 2.22 × 10−3 | 0.0124 | 0.0067 | 0.0117 | 0.0032 | |
| MEAN | 8.46 × 10−4 | 0.0033 | 0.0025 | 0.0022 | 0.0012 | |
| STD | 7.79 × 10−4 | 0.0032 | 0.0024 | 0.0022 | 8.50 × 10−4 | |
| F12 | BEST | −10.5363 | −4.5193 | −4.5585 | −4.8779 | −5.7062 |
| WORST | −3.5611 | −0.1950 | −1.3644 | −0.8549 | −1.1030 | |
| MEAN | −6.9625 | −1.7858 | −2.9798 | −3.0082 | −3.8766 | |
| STD | 1.0408 | 3.0935 | 1.3543 | 2.2399 | 2.4978 |
| Function | Index | SPSOA | MSOA | BSOA | PSO | GWO | WSO | WOA |
|---|---|---|---|---|---|---|---|---|
| F1 | BEST | 0 | 1.09 × 10−130 | 0 | 0.0908 | 2.69 × 10−29 | 83.5621 | 1.78 × 10−7 |
| WORST | 1.94 × 10−245 | 1.10 × 10−59 | 2.73 × 10−221 | 2.4206 | 2.08 × 10−26 | 606.1327 | 5.87 × 10−7 | |
| MEAN | 2.84 ×10−247 | 5.36 × 10−61 | 9.11 × 10−223 | 0.5532 | 1.65 × 10−27 | 257.9395 | 3.28 × 10−7 | |
| STD | 0 | 2.18 × 10−60 | 0 | 0.59168 | 3.87 × 10−27 | 124.2097 | 9.28 × 10−6 | |
| TIME | 0.1084 | 0.1241 | 0.1443 | 1.014 | 0.2210 | 0.2883 | 0.1894 | |
| F2 | BEST | 8.24 × 10−259 | 1.36 × 10−77 | 1.86 × 10−205 | 0.0358 | 2.65 × 10−17 | 1.9215 | 9.28 × 10−13 |
| WORST | 2.77 × 10−172 | 2.52 × 10−29 | 7.81 × 10−155 | 20.0785 | 3.53 × 10−16 | 8.1539 | 1.32 × 10−8 | |
| MEAN | 4.24 × 10−173 | 8.42 × 10−31 | 2.60 × 10−156 | 1.7606 | 1.32 × 10−16 | 5.0475 | 6.71 × 10−10 | |
| STD | 0 | 4.61 × 10−30 | 1.42 × 10−155 | 4.6023 | 8.26 × 10−17 | 1.3673 | 2.40 × 10−9 | |
| TIME | 0.1256 | 0.1461 | 0.1605 | 0.8429 | 0.1401 | 0.1814 | 0.1354 | |
| F3 | BEST | 6.90 × 10−248 | 1.47 × 10−43 | 9.33 × 10−214 | 6.0333 | 5.62 × 10−8 | 10.48 | 5.39 × 10−5 |
| WORST | 2.81 × 10−118 | 2.94 × 10−12 | 1.84 × 10−31 | 11.8971 | 1.88 × 10−6 | 16.46 | 1.05 × 10−4 | |
| MEAN | 1.39 × 10−119 | 1.06 × 10−13 | 6.13 × 10−33 | 8.6624 | 5.21 × 10−7 | 13.80 | 8.20 × 10−5 | |
| STD | 1.62 × 10−118 | 5.37 × 10−13 | 3.36 × 10−32 | 1.4717 | 4.33 × 10−7 | 1.72 | 1.37 × 10−5 | |
| TIME | 0.1182 | 0.1420 | 0.1422 | 0.8460 | 0.1402 | 0.1867 | 0.1278 | |
| F4 | BEST | 6.30 × 10−4 | 2.87 × 10−2 | 0.0829 | 75.3648 | 26.1669 | 2992.658 | 28.8767 |
| WORST | 28.8408 | 28.8536 | 28.8475 | 90237.8870 | 28.7378 | 90507.1557 | 28.9532 | |
| MEAN | 20.2261 | 24.9397 | 26.6308 | 27185.0674 | 27.3274 | 19976.6055 | 28.9085 | |
| STD | 10.2558 | 12.388 | 12.1404 | 41931.1362 | 0.6798 | 19264.1293 | 0.0182 | |
| TIME | 0.1503 | 0.1546 | 0.1644 | 0.9514 | 0.1891 | 0.2117 | 0.1834 | |
| F5 | BEST | 0.0115 | 0.0169 | 0.0641 | 0.0570 | 0.1197 | 138.9501 | 4.8619 |
| WORST | 3.0266 | 3.2671 | 4.3176 | 3.2801 | 3.5117 | 695.5827 | 6.3001 | |
| MEAN | 1.3783 | 1.7443 | 2.1365 | 1.6012 | 1.7379 | 313.6182 | 5.746 | |
| STD | 0.9106 | 1.5751 | 1.3466 | 1.4739 | 1.3640 | 141.1462 | 2.3374 | |
| TIME | 0.1163 | 0.1557 | 0.1434 | 0.8476 | 0.1574 | 0.1946 | 0.1453 | |
| F6 | BEST | 2.89 × 10−7 | 5.75 × 10−5 | 6.52 × 10−6 | 0.0289 | 7.29 × 10−4 | 0.0541 | 6.58 × 10−4 |
| WORST | 4.42 × 10−4 | 0.0041 | 7.61 × 10−4 | 0.0935 | 0.0038 | 0.2165 | 0.0039 | |
| MEAN | 1.88 × 10−4 | 0.0012 | 2.84 × 10−4 | 0.0586 | 0.0020 | 0.1265 | 0.0018 | |
| STD | 1.12 × 10−4 | 9.67 × 10−4 | 2.06 × 10−4 | 0.0192 | 7.69 × 10−4 | 0.0500 | 8.42 × 10−4 | |
| TIME | 0.1929 | 0.2252 | 0.2279 | 0.9431 | 0.2201 | 0.2623 | 0.2884 | |
| F7 | BEST | 0 | 0 | 0 | 24.5566 | 5.68 × 10−14 | 29.2575 | 1.70 × 10−13 |
| WORST | 0 | 0 | 0 | 97.0660 | 11.5549 | 83.9381 | 2.34 × 10−8 | |
| MEAN | 0 | 0 | 0 | 56.1656 | 2.2151 | 48.4338 | 8.88 × 10−10 | |
| STD | 0 | 0 | 0 | 17.5878 | 3.3643 | 12.9391 | 4.26 × 10−9 | |
| TIME | 0.1471 | 0.1596 | 0.1512 | 0.9208 | 0.1983 | 0.1946 | 0.1685 | |
| F8 | BEST | 0 | 0 | 0 | 0.2068 | 3.39 × 10−5 | 1.7447 | 3.32 × 10−8 |
| WORST | 0 | 0 | 0 | 0.9657 | 0.0305 | 6.2032 | 9.27 × 10−7 | |
| MEAN | 0 | 0 | 0 | 0.5836 | 0.0038 | 3.6787 | 2.92 × 10−7 | |
| STD | 0 | 0 | 0 | 0.2110 | 0.0082 | 1.3271 | 2.33 × 10−7 | |
| TIME | 0.1697 | 0.1883 | 0.1748 | 0.8457 | 0.2108 | 0.2174 | 0.1799 | |
| F9 | BEST | 3.85 × 10−4 | 9.66 × 10−4 | 0.0012 | 8.35 × 10−4 | 0.0132 | 1.8144 | 0.4098 |
| WORST | 0.1239 | 0.1500 | 0.3743 | 0.9510 | 0.1933 | 10.3259 | 0.7856 | |
| MEAN | 0.0425 | 0.0591 | 0.0801 | 0.2765 | 0.0529 | 4.4220 | 0.5745 | |
| STD | 0.0364 | 0.0452 | 0.0838 | 0.2830 | 0.0417 | 1.9411 | 0.0823 | |
| TIME | 0.3827 | 0.3887 | 0.4158 | 1.1176 | 0.4226 | 0.5806 | 0.6227 | |
| F10 | BEST | 1.21 × 10−5 | 5.26 × 10−4 | 0.0015 | 0.1733 | 0.1694 | 29.1694 | 1.7590 |
| WORST | 1.5300 | 1.6126 | 1.6774 | 4.8634 | 1.8458 | 7676.9234 | 2.9953 | |
| MEAN | 0.3992 | 0.4495 | 0.4977 | 1.3404 | 0.6365 | 944.6180 | 2.4436 | |
| STD | 0.4592 | 0.5537 | 0.4708 | 1.1938 | 0.4613 | 1705.6680 | 0.6278 | |
| TIME | 0.3839 | 0.4256 | 0.4051 | 1.1018 | 0.5169 | 0.4878 | 0.6235 | |
| F11 | BEST | 3.09 × 10−4 | 3.11 × 10−4 | 3.19 × 10−4 | 6.69 × 10−4 | 3.14 × 10−4 | 3.14 × 10−4 | 3.14 × 10−4 |
| WORST | 2.22 × 10−3 | 2.29 × 10−3 | 3.07 × 10−3 | 0.0203 | 2.85 × 10−3 | 6.52 × 10−3 | 8.93 × 10−3 | |
| MEAN | 8.46 × 10−4 | 1.03 × 10−3 | 9.69 × 10−4 | 0.0190 | 6.02 × 10−3 | 2.07 × 10−3 | 4.77 × 10−3 | |
| STD | 7.79 × 10−4 | 2.57 × 10−4 | 8.56 × 10−4 | 0.0049 | 1.07 × 10−3 | 9.93 × 10−4 | 1.27 × 10−3 | |
| TIME | 0.0787 | 0.1009 | 0.1049 | 0.8153 | 0.1218 | 0.2401 | 0.2003 | |
| F12 | BEST | −10.5363 | −10.5336 | −10.5363 | −10.5363 | −10.5361 | −10.5363 | −4.9747 |
| WORST | −3.5611 | −2.6472 | −1.7687 | −2.8066 | −3.1285 | −2.8711 | −1.9865 | |
| MEAN | −6.9625 | −5.5595 | −5.6402 | −4.3569 | −6.4729 | −6.2699 | −3.4686 | |
| STD | 1.0408 | 2.7921 | 2.9755 | 3.1426 | 2.3719 | 2.3389 | 2.2510 | |
| TIME | 0.1110 | 0.1339 | 0.1355 | 1.0387 | 0.1788 | 0.2288 | 0.7654 |
| Function | SPSOA-MSOA | SPSOA-BSOA | SPSOA-PSO | SPSOA-GWO | SPSOA-WSO | SPSOA-BOA |
|---|---|---|---|---|---|---|
| F1 | NaN | NaN | 1.10 × 10−11 | 1.10 × 10−11 | 1.10 × 10−11 | 1.10 × 10−11 |
| F2 | 3.02 × 10−11 | 1.96 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| F3 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 |
| F4 | 1.66 × 10−4 | 2.47 × 10−4 | 3.02 × 10−11 | 2.27 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 |
| F5 | 1.85 × 10−4 | 1.17 × 10−4 | 4.45 × 10−4 | 3.33 × 10−4 | 3.02 × 10−11 | 3.02 × 10−11 |
| F6 | 2.92 × 10−4 | 3.62 × 10−4 | 3.01 × 10−11 | 1.10 × 10−8 | 3.01 × 10−11 | 3.01 × 10−11 |
| F7 | NaN | NaN | 1.21 × 10−12 | 4.26 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 |
| F8 | NaN | NaN | 1.21 × 10−12 | 5.58 × 10−4 | 1.21 × 10−12 | 1.21 × 10−12 |
| F9 | 6.54 × 10−4 | 1.17 × 10−5 | 3.32 × 10−6 | 4.52 × 10−4 | 3.02 × 10−11 | 3.02 × 10−11 |
| F10 | 8.31 × 10−4 | 2.29 × 10−4 | 6.73 × 10−6 | 6.35 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 |
| F11 | 3.32 × 10−11 | 3.01 × 10−11 | 3.33 × 10−11 | 3.68 × 10−11 | 3.01 × 10−11 | 3.01 × 10−11 |
| F12 | 1.07 × 10−11 | 1.07 × 10−11 | 1.07 × 10−11 | 1.07 × 10−11 | 1.07 × 10−11 | 1.07 × 10−11 |
| +/=/− | 9/3/0 | 9/3/0 | 12/0/0 | 12/0/0 | 12/0/0 | 12/0/0 |
| Algorithm | SOA | MSOA | BSOA | SPSOA |
|---|---|---|---|---|
| similarity coefficient | 0.8574 | 0.9052 | 0.9240 | 0.9784 |
| 0.8909 | 0.8793 | 0.9065 | 0.9638 | |
| 0.8445 | 0.8961 | 0.9457 | 0.9857 | |
| 0.8283 | 0.9178 | 0.9247 | 0.9863 | |
| PI | 0.2786 | 0.2031 | 0.1549 | 0.1127 |
| SSIM | 0.8233 | 0.8764 | 0.9147 | 0.9592 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Q.; Ding, Y.; Zhang, R.; Zhang, H.; Li, S.; Li, X. Optimal Performance and Application for Seagull Optimization Algorithm Using a Hybrid Strategy. Entropy 2022, 24, 973. https://doi.org/10.3390/e24070973
Xia Q, Ding Y, Zhang R, Zhang H, Li S, Li X. Optimal Performance and Application for Seagull Optimization Algorithm Using a Hybrid Strategy. Entropy. 2022; 24(7):973. https://doi.org/10.3390/e24070973
Chicago/Turabian StyleXia, Qingyu, Yuanming Ding, Ran Zhang, Huiting Zhang, Sen Li, and Xingda Li. 2022. "Optimal Performance and Application for Seagull Optimization Algorithm Using a Hybrid Strategy" Entropy 24, no. 7: 973. https://doi.org/10.3390/e24070973
APA StyleXia, Q., Ding, Y., Zhang, R., Zhang, H., Li, S., & Li, X. (2022). Optimal Performance and Application for Seagull Optimization Algorithm Using a Hybrid Strategy. Entropy, 24(7), 973. https://doi.org/10.3390/e24070973