
Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Socially motivated: to determine the role of the size of the influence group on the emerging social behavior (consensus, polarization, hysteresis, etc.).
2. Model
- Choose a target agent , where is a discrete uniform distribution in the interval ,
- Choose , where is a continuous uniform distribution in the interval , to determine the type of social response,
- If then independence: or 3 with equal probabilities ,
- Otherwise conformity:
- (a)
- Select at random without repetition q agents from neighbors of the target agent—they form the source of influence, called also the q-panel, and are indexed by .
- (b)
- If the q-panel is unanimous, i.e., and the BC requirement is fulfilled, then .
3. Mean-Field Approach
- For the CG we are able to obtain exact analytical results within MFA.
- To understand the role of BC in three-state qVM, we need to use the same structure as in [24], in which three-state qVM without BC was considered—that is, CG.
4. Results
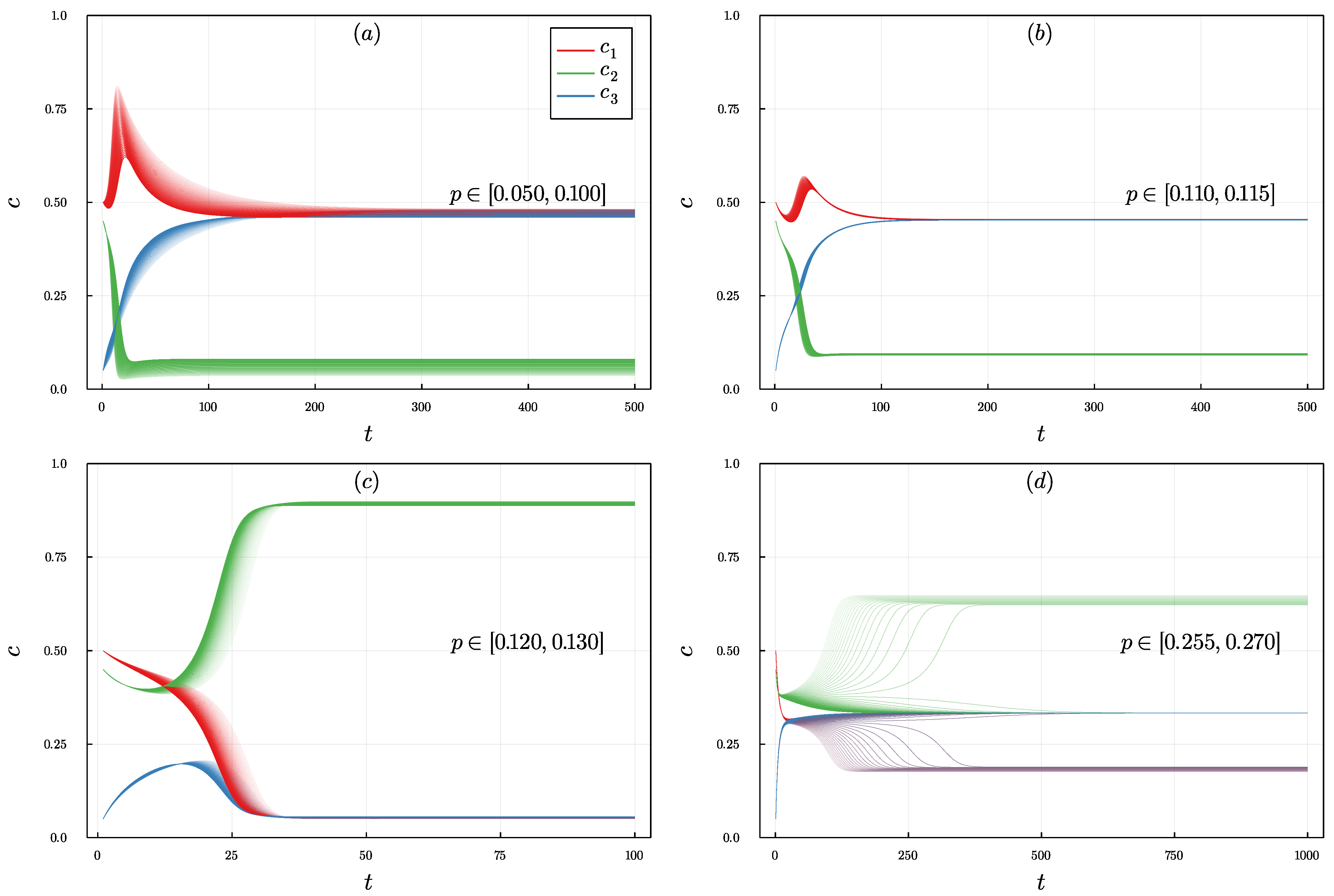
4.1. Trajectories
- disagreement:
- ,
- central dominance:
- ,
- extreme dominance:
- or and
- polarization:
- .
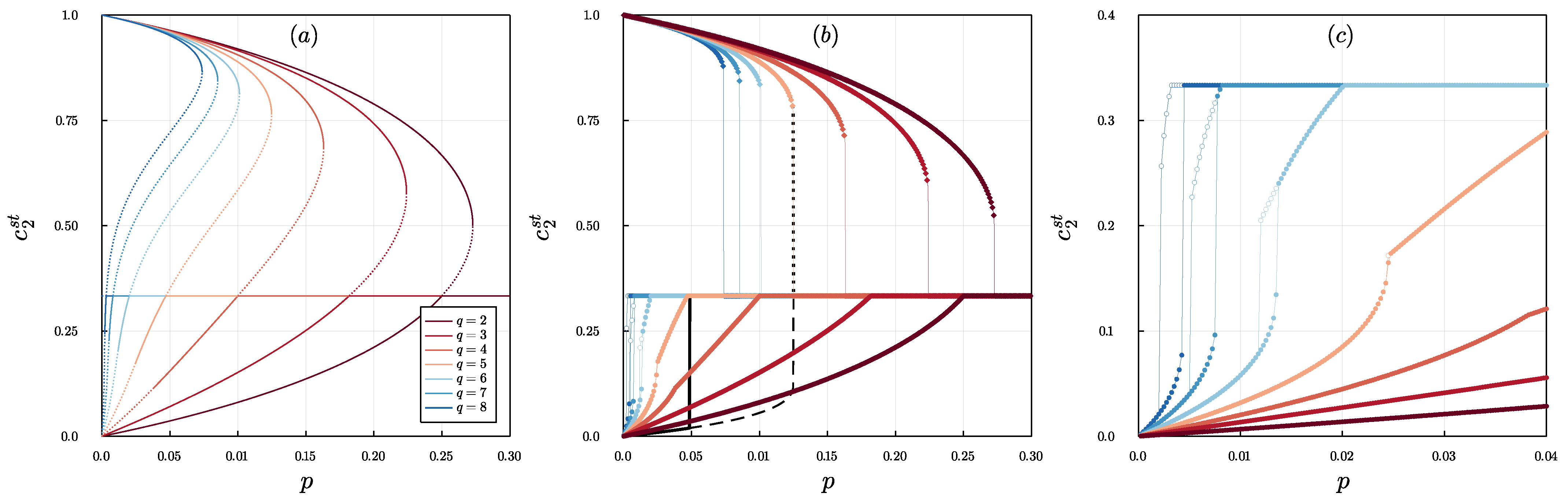
4.2. Stationary States
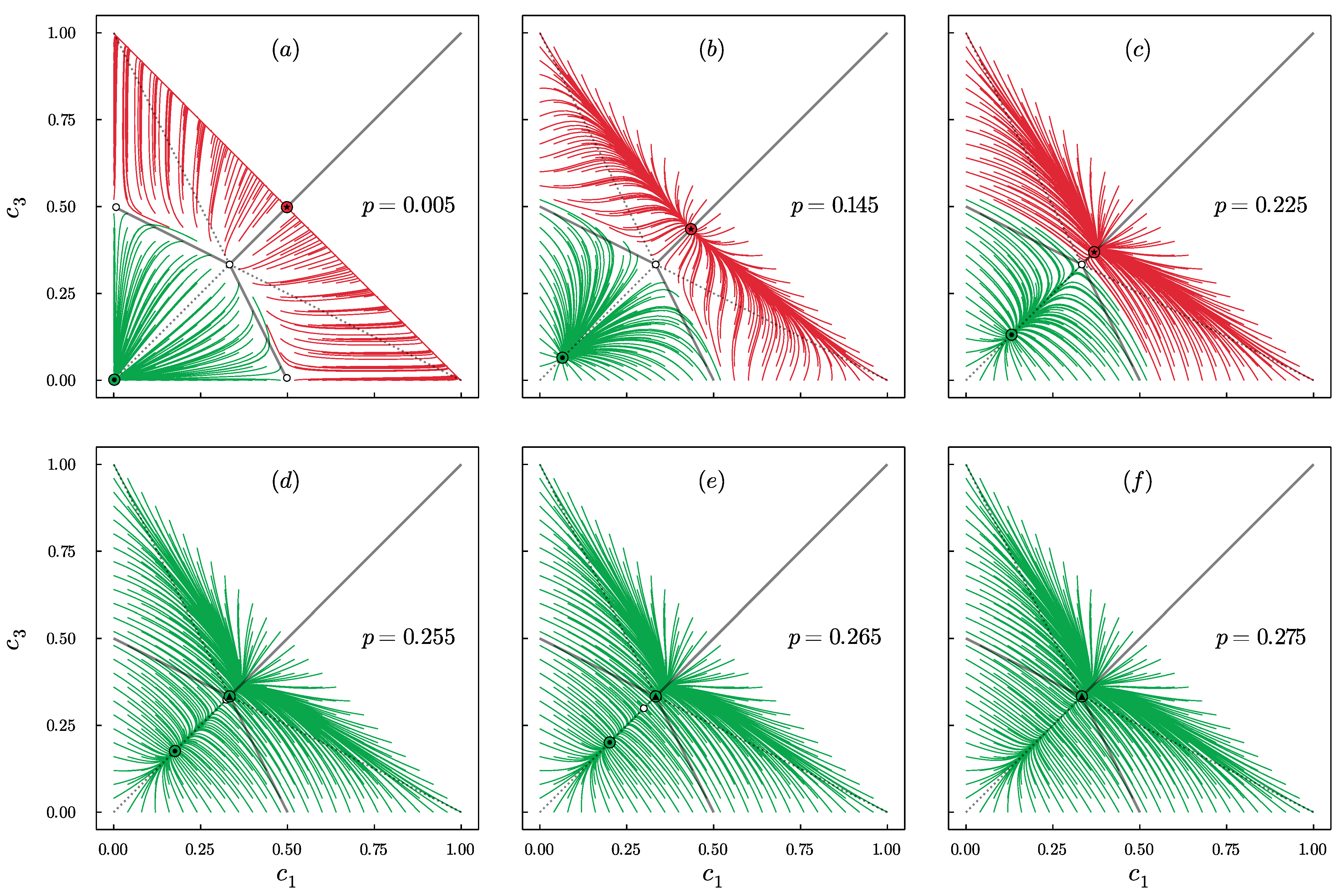
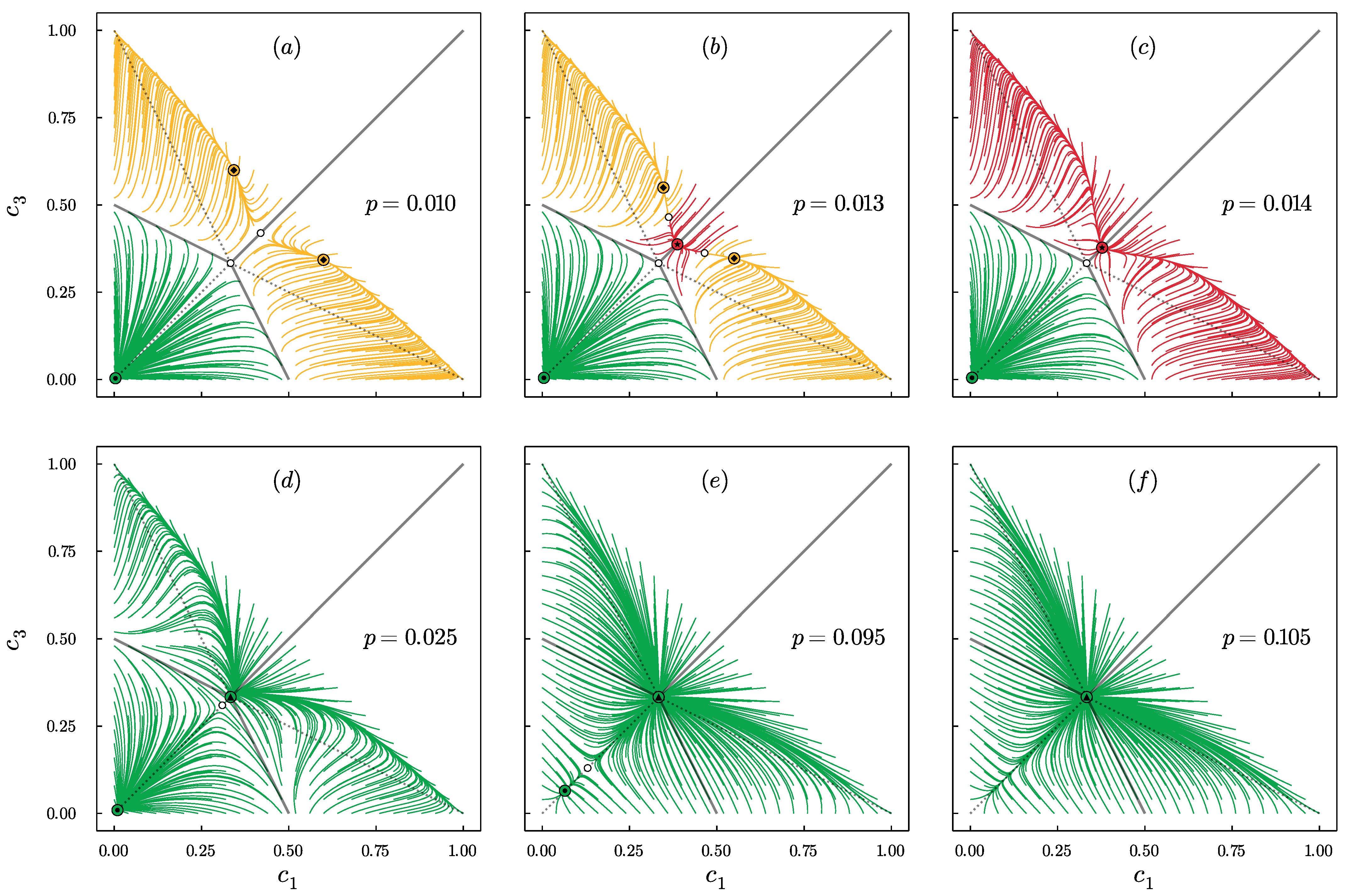
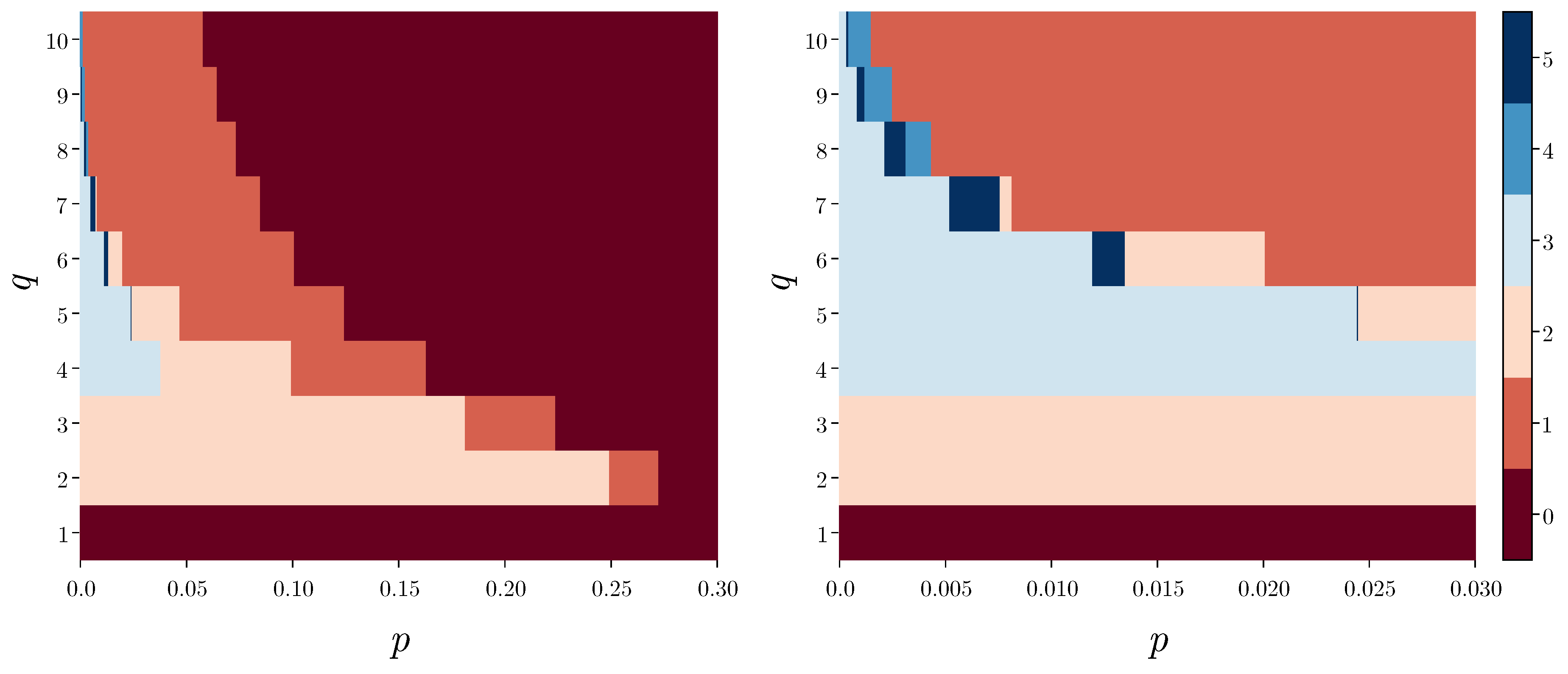
4.3. Phase Portraits
- (2)
- polarization + central dominance,
- (1)
- disagreement + central dominance and
- (0)
- disagreement.
- (5)
- polarization + central dominance + extreme dominance,
- (4)
- disagreement + central dominance + extreme dominance,
- (3)
- extreme dominance + central dominance,
- (2)
- polarization + central dominance,
- (1)
- disagreement + central dominance and
- (0)
- disagreement.
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Flache, A.; Mäs, M.; Feliciani, T.; Chattoe-Brown, E.; Deffuant, G.; Huet, S.; Lorenz, J. Models of social influence: Towards the next frontiers. JASSS 2017, 20, 2. [Google Scholar] [CrossRef] [Green Version]
- Jędrzejewski, A.; Sznajd-Weron, K. Statistical Physics Of Opinion Formation: Is it a SPOOF? [Physique statistique de la formation d’opinion: Est-ce une blague?]. Comptes Rendus Phys. 2019, 20, 244–261. [Google Scholar] [CrossRef]
- Grabisch, M.; Rusinowska, A. A survey on nonstrategic models of opinion dynamics. Games 2020, 11, 65. [Google Scholar] [CrossRef]
- Zha, Q.; Kou, G.; Zhang, H.; Liang, H.; Chen, X.; Li, C.; Dong, Y. Opinion dynamics in finance and business: A literature review and research opportunities. Financ. Innov. 2020, 6, 44. [Google Scholar] [CrossRef]
- Noorazar, H. Recent advances in opinion propagation dynamics: A 2020 survey. Eur. Phys. J. Plus 2020, 135, 521. [Google Scholar] [CrossRef]
- Sobkowicz, P. Whither Now, Opinion Modelers? Front. Phys. 2020, 8, 587009. [Google Scholar] [CrossRef]
- Galesic, M.; Olsson, H.; Dalege, J.; Van Der Does, T.; Stein, D. Integrating social and cognitive aspects of belief dynamics: Towards a unifying framework. J. R. Soc. Interface 2021, 18, 20200857. [Google Scholar] [CrossRef]
- Stauffer, D. Better being third than second in a search for a majority opinion. Adv. Complex Syst. 2002, 5, 97–100. [Google Scholar] [CrossRef]
- Vazquez, F.; Krapivsky, P.; Redner, S. Constrained opinion dynamics: Freezing and slow evolution. J. Phys. A Math. Gen. 2003, 36, L61–L68. [Google Scholar] [CrossRef] [Green Version]
- Vazquez, F.; Redner, S. Ultimate fate of constrained voters. J. Phys. A Math. Gen. 2004, 37, 8479–8494. [Google Scholar] [CrossRef]
- Chen, P.; Redner, S. Consensus formation in multi-state majority and plurality models. J. Phys. A Math. Gen. 2005, 38, 7239–7252. [Google Scholar] [CrossRef] [Green Version]
- Gekle, S.; Peliti, L.; Galam, S. Opinion dynamics in a three-choice system. Eur. Phys. J. B 2005, 45, 569–575. [Google Scholar] [CrossRef]
- Timpanaro, A.; Prado, C. Generalized Sznajd model for opinion propagation. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2009, 80, 021119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mobilia, M. Fixation and polarization in a three-species opinion dynamics model. EPL 2011, 95, 50002. [Google Scholar] [CrossRef] [Green Version]
- Timpanaro, A.; Prado, C. Coexistence of interacting opinions in a generalized Sznajd model. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2011, 84, 027101. [Google Scholar] [CrossRef] [Green Version]
- Galam, S. The Drastic Outcomes from Voting Alliances in Three-Party Democratic Voting (1990 → 2013). J. Stat. Phys. 2013, 151, 46–68. [Google Scholar] [CrossRef]
- Crokidakis, N. A three-state kinetic agent-based model to analyze tax evasion dynamics. Phys. A Stat. Mech. Its Appl. 2014, 414, 321–328. [Google Scholar] [CrossRef] [Green Version]
- Fennell, P.; Gleeson, J. Multistate dynamical processes on networks: Analysis through degree-based approximation frameworks. SIAM Rev. 2019, 61, 92–118. [Google Scholar] [CrossRef]
- Herreriás-Azcué, F.; Galla, T. Consensus and diversity in multistate noisy voter models. Phys. Rev. E 2019, 100, 022304. [Google Scholar] [CrossRef] [Green Version]
- Bańcerowski, P.; Malarz, K. Multi-choice opinion dynamics model based on Latané theory. Eur. Phys. J. B 2019, 92, 219. [Google Scholar] [CrossRef]
- Oestereich, A.; Pires, M.; Crokidakis, N. Three-state opinion dynamics in modular networks. Phys. Rev. E 2019, 100, 032312. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kowalska-Styczen, A.; Malarz, K. Noise induced unanimity and disorder in opinion formation. PLoS ONE 2020, 15, e0235313. [Google Scholar] [CrossRef] [PubMed]
- Khalil, N.; Galla, T. Zealots in multistate noisy voter models. Phys. Rev. E 2021, 103, 012311. [Google Scholar] [CrossRef] [PubMed]
- Nowak, B.; Stoń, B.; Sznajd-Weron, K. Discontinuous phase transitions in the multi-state noisy q-voter model: Quenched vs. annealed disorder. Sci. Rep. 2021, 11, 6098. [Google Scholar] [CrossRef]
- Melo, D.; Pereira, L.; Moreira, F. The phase diagram and critical behavior of the three-state majority-vote model. J. Stat. Mech. Theory Exp. 2010, 2010, P11032. [Google Scholar] [CrossRef] [Green Version]
- Lima, F. Three-state majority-vote model on square lattice. Phys. A Stat. Mech. Its Appl. 2012, 391, 1753–1758. [Google Scholar] [CrossRef] [Green Version]
- Crokidakis, N. Role of noise and agents’ convictions on opinion spreading in a three-state voter-like model. J. Stat. Mech. Theory Exp. 2013, 2013, P07008. [Google Scholar] [CrossRef]
- Sobkowicz, P. Discrete Model of Opinion Changes Using Knowledge and Emotions as Control Variables. PLoS ONE 2012, 7, e44489. [Google Scholar] [CrossRef]
- Li, G.; Chen, H.; Huang, F.; Shen, C. Discontinuous phase transition in an annealed multi-state majority-vote model. J. Stat. Mech. Theory Exp. 2016, 2016, 073403. [Google Scholar] [CrossRef] [Green Version]
- Balankin, A.; Martínez-Cruz, M.; Gayosso Martínez, F.; Mena, B.; Tobon, A.; Patiño-Ortiz, J.; Patiño-Ortiz, M.; Samayoa, D. Ising percolation in a three-state majority vote model. Phys. Lett. Sect. A Gen. At. Solid State Phys. 2017, 381, 440–445. [Google Scholar] [CrossRef]
- Vilela, A.; Zubillaga, B.; Wang, C.; Wang, M.; Du, R.; Stanley, H. Three-State Majority-vote Model on Scale-Free Networks and the Unitary Relation for Critical Exponents. Sci. Rep. 2020, 10, 8255. [Google Scholar] [CrossRef] [PubMed]
- Zubillaga, B.; Vilela, A.; Wang, M.; Du, R.; Dong, G.; Stanley, H. Three-state majority-vote model on small-world networks. Sci. Rep. 2022, 12, 282. [Google Scholar] [CrossRef]
- Hegselmann, R.; Krause, U. Opinion dynamics and bounded confidence: Models, analysis and simulation. JASSS 2002, 5, 1–33. [Google Scholar]
- Deffuant, G.; Amblard, F.; Weisbuch, G.; Faure, T. How can extremism prevail? A study based on the relative agreement interaction model. JASSS 2002, 5, 1–26. [Google Scholar]
- Lorenz, J. Continuous opinion dynamics under bounded confidence: A survey. Int. J. Mod. Phys. C 2007, 18, 1819–1838. [Google Scholar] [CrossRef] [Green Version]
- Radosz, W.; Doniec, M. Three-State Opinion Q-Voter Model with Bounded Confidence. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2021; Volume 12744, pp. 295–301. [Google Scholar]
- Bond, R. Group size and conformity. Group Process. Intergroup Relat. 2005, 8, 331–354. [Google Scholar] [CrossRef]
- Wheelan, S.A. Group size, group development, and group productivity. Small Group Res. 2009, 40, 247–262. [Google Scholar] [CrossRef]
- Kenna, R.; Berche, B. Critical mass and the dependency of research quality on group size. Scientometrics 2011, 86, 527–540. [Google Scholar] [CrossRef] [Green Version]
- Dezecache, G.; Dunbar, R.I.M. Sharing the joke: The size of natural laughter groups. Evol. Hum. Behav. 2012, 33, 775–779. [Google Scholar] [CrossRef]
- Apedoe, X.; Ellefson, M.; Schunn, C. Learning Together While Designing: Does Group Size Make a Difference? J. Sci. Educ. Technol. 2012, 21, 83–94. [Google Scholar] [CrossRef] [Green Version]
- Castellano, C.; Muñoz, M.A.; Pastor-Satorras, R. Nonlinear q-voter model. Phys. Rev. E 2009, 80, 041129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jędrzejewski, A. Pair approximation for the q-voter model with independence on complex networks. Phys. Rev. E 2017, 95, 012307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nyczka, P.; Sznajd-Weron, K.; Cisło, J. Phase transitions in the q-voter model with two types of stochastic driving. Phys. Rev. E 2012, 86, 011105. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alberto Javarone, M.; Squartini, T. Conformism-driven phases of opinion formation on heterogeneous networks: The q-voter model case. J. Stat. Mech. Theory Exp. 2015, 2015, P10002. [Google Scholar] [CrossRef] [Green Version]
- Peralta, A.F.; Carro, A.; San Miguel, M.; Toral, R. Analytical and numerical study of the non-linear noisy voter model on complex networks. Chaos 2018, 28, 075516. [Google Scholar] [CrossRef] [Green Version]
- Khalil, N.; Toral, R. The noisy voter model under the influence of contrarians. Phys. A 2019, 515, 81–92. [Google Scholar] [CrossRef] [Green Version]
- Gradowski, T.; Krawiecki, A. Pair approximation for the q-voter model with independence on multiplex networks. Phys. Rev. E 2020, 102, 022314. [Google Scholar] [CrossRef]
- Chmiel, A.; Sienkiewicz, J.; Fronczak, A.; Fronczak, P. A Veritable Zoology of Successive Phase Transitions in the Asymmetric q-Voter Model on Multiplex Networks. Entropy 2020, 22, 1018. [Google Scholar] [CrossRef]
- Vieira, A.R.; Peralta, A.F.; Toral, R.; Miguel, M.S.; Anteneodo, C. Pair approximation for the noisy threshold q-voter model. Phys. Rev. E 2020, 101, 052131. [Google Scholar] [CrossRef]
- Civitarese, J. External fields, independence, and disorder in q-voter models. Phys. Rev. E 2021, 103, 012303. [Google Scholar] [CrossRef]
- Strogatz, S. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry and Engineering; Studies in nonlinearity; CRC Press: Westview, NJ, USA, 2000. [Google Scholar]
- Macy, M.; Ma, M.; Tabin, D.; Gao, J.; Szymanski, B. Polarization and tipping points. Proc. Natl. Acad. Sci. USA 2021, 118, e2102144118. [Google Scholar] [CrossRef] [PubMed]
- Sobkowicz, P. Quantitative agent based model of opinion dynamics: Polish elections of 2015. PLoS ONE 2016, 11, e0155098. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Der Maas, H.; Dalege, J.; Waldorp, L. The polarization within and across individuals: The hierarchical Ising opinion model. J. Complex Netw. 2020, 8, 1–23. [Google Scholar] [CrossRef]
- Márquez, L.; Cantillo, V.; Arellana, J. Assessing the influence of indicators’ complexity on hybrid discrete choice model estimates. Transportation 2020, 47, 373–396. [Google Scholar] [CrossRef]
- Chen, H.; Li, G. Phase transitions in a multistate majority-vote model on complex networks. Phys. Rev. E 2018, 97, 062304. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crokidakis, N.; De Oliveira, P. Inflexibility and independence: Phase transitions in the majority-rule model. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2015, 92, 062122. [Google Scholar] [CrossRef] [Green Version]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doniec, M.; Lipiecki, A.; Sznajd-Weron, K. Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence. Entropy 2022, 24, 983. https://doi.org/10.3390/e24070983
Doniec M, Lipiecki A, Sznajd-Weron K. Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence. Entropy. 2022; 24(7):983. https://doi.org/10.3390/e24070983
Chicago/Turabian StyleDoniec, Maciej, Arkadiusz Lipiecki, and Katarzyna Sznajd-Weron. 2022. "Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence" Entropy 24, no. 7: 983. https://doi.org/10.3390/e24070983
APA StyleDoniec, M., Lipiecki, A., & Sznajd-Weron, K. (2022). Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence. Entropy, 24(7), 983. https://doi.org/10.3390/e24070983