
Nighttime Image Stitching Method Based on Guided Filtering Enhancement

Abstract
:1. Introduction
- An enhancement algorithm based on guided filtering is proposed, so as to obtain nighttime images with good enhancement effect.
- A nighttime image stitching method based on enhancement algorithm is constructed to increase the number of night image matching pairs, so as to achieve high accuracy for images stitching.
2. Related Work
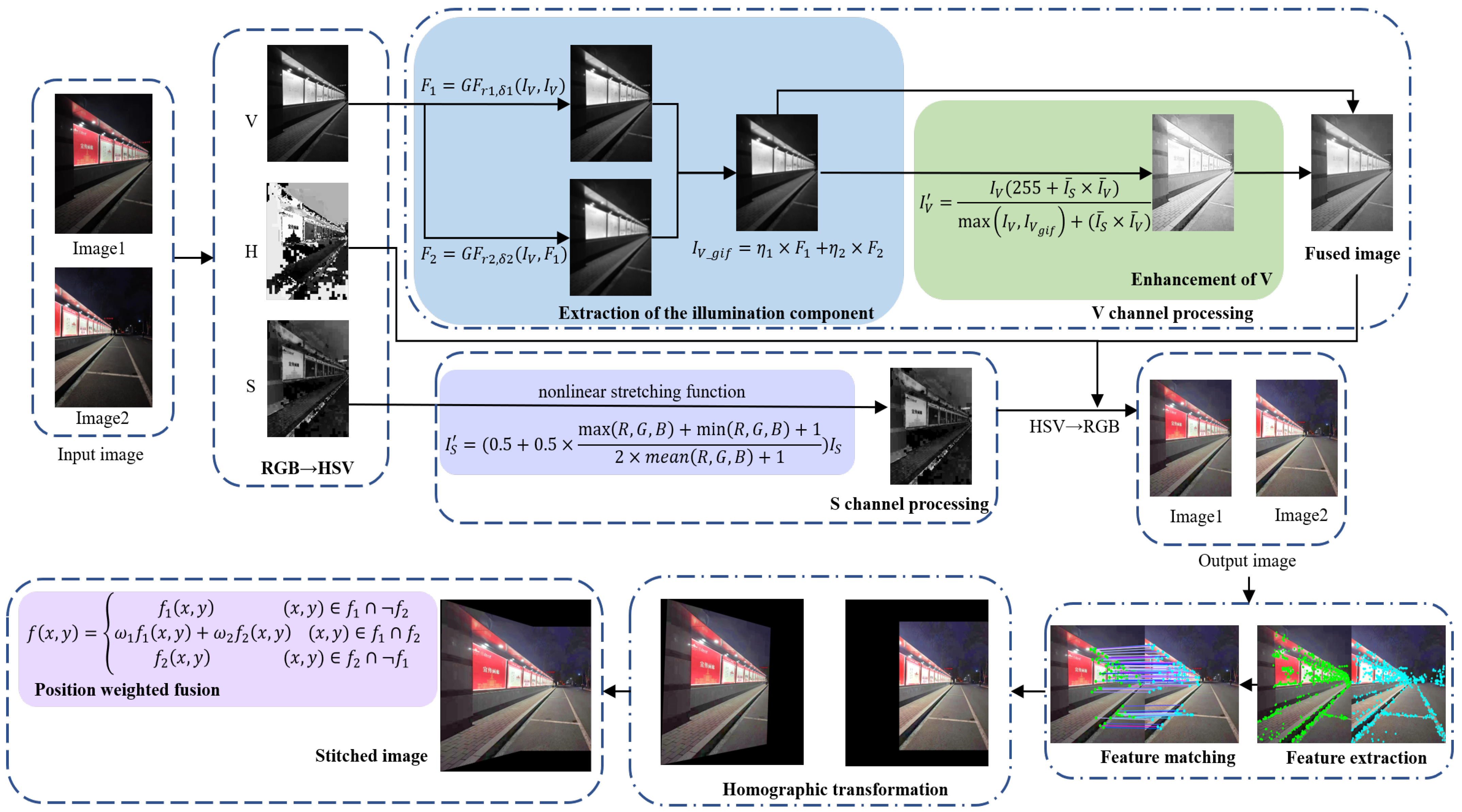
3. The Proposed Nighttime Image Enhancement Method
3.1. Space Conversion
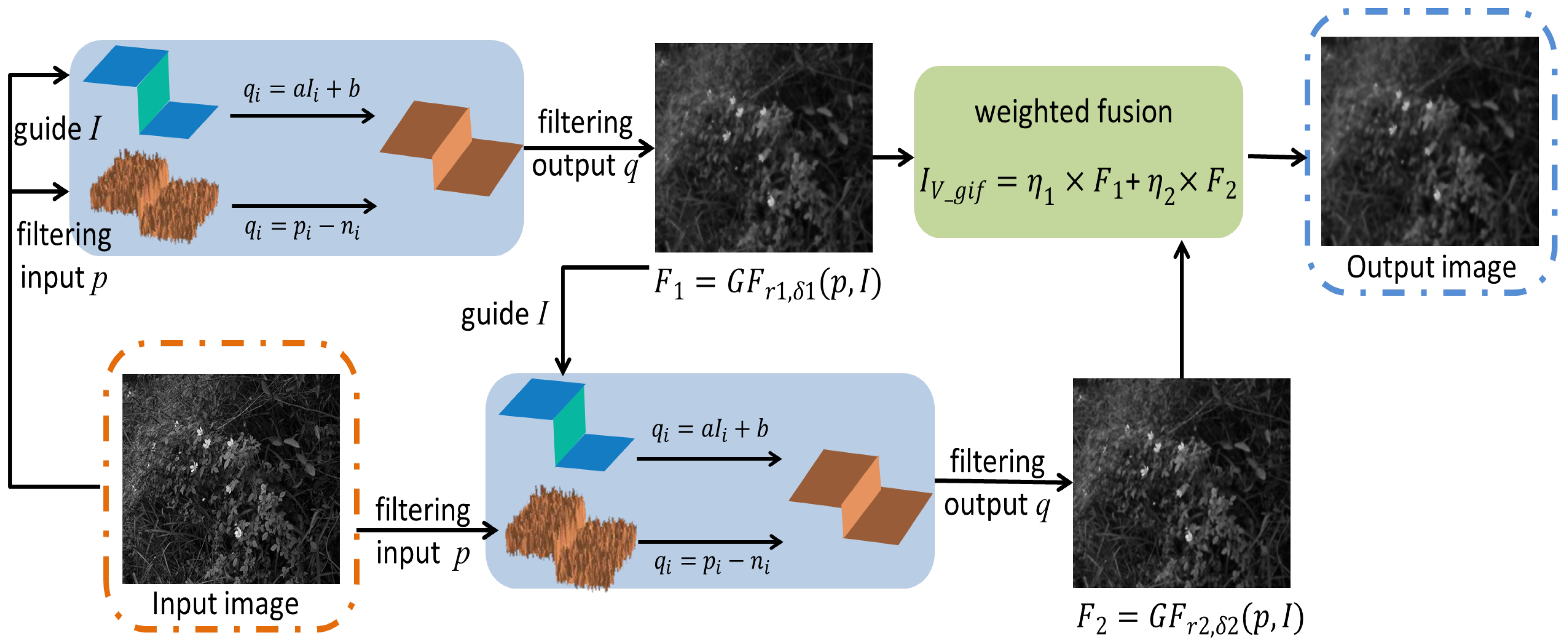
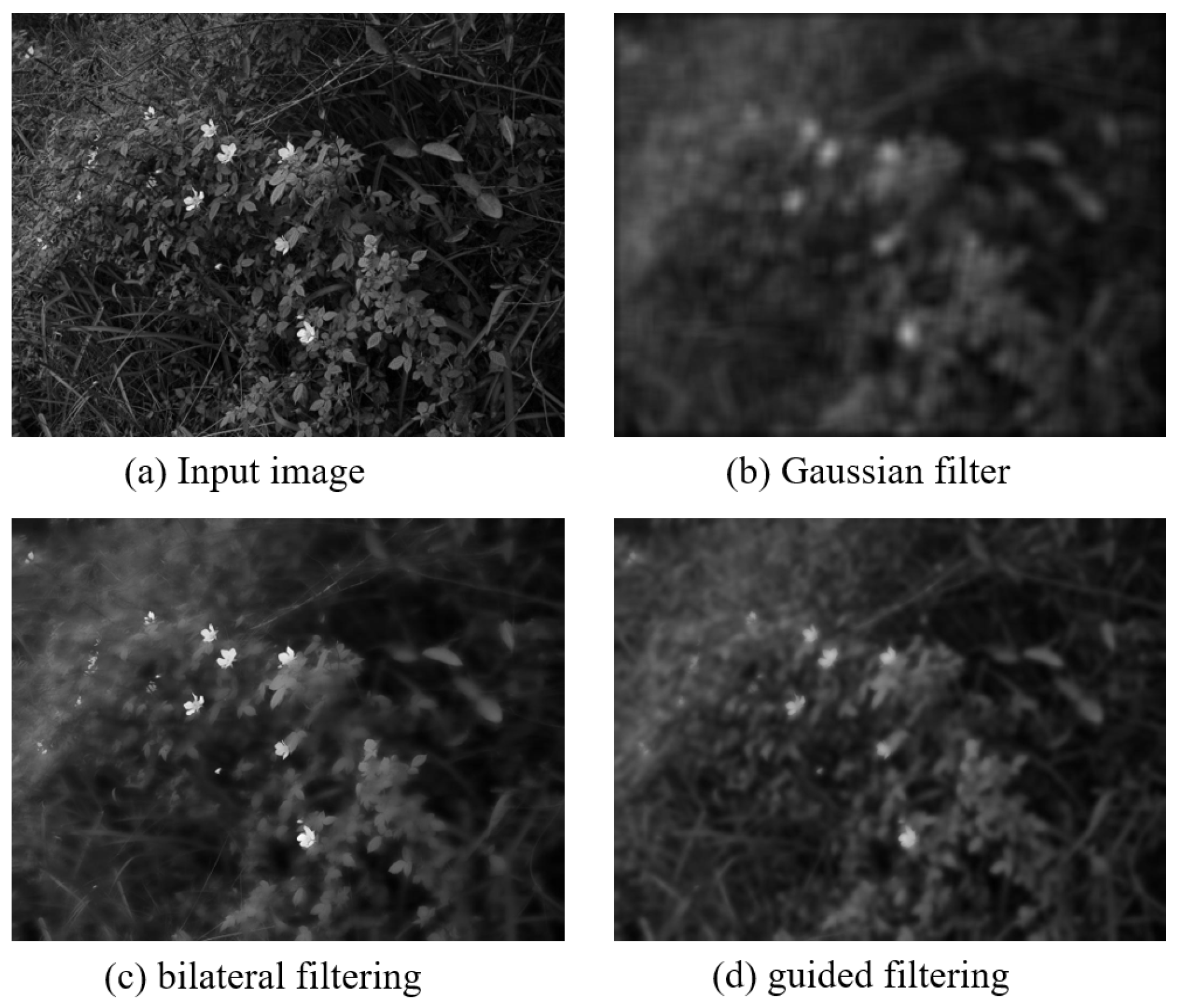
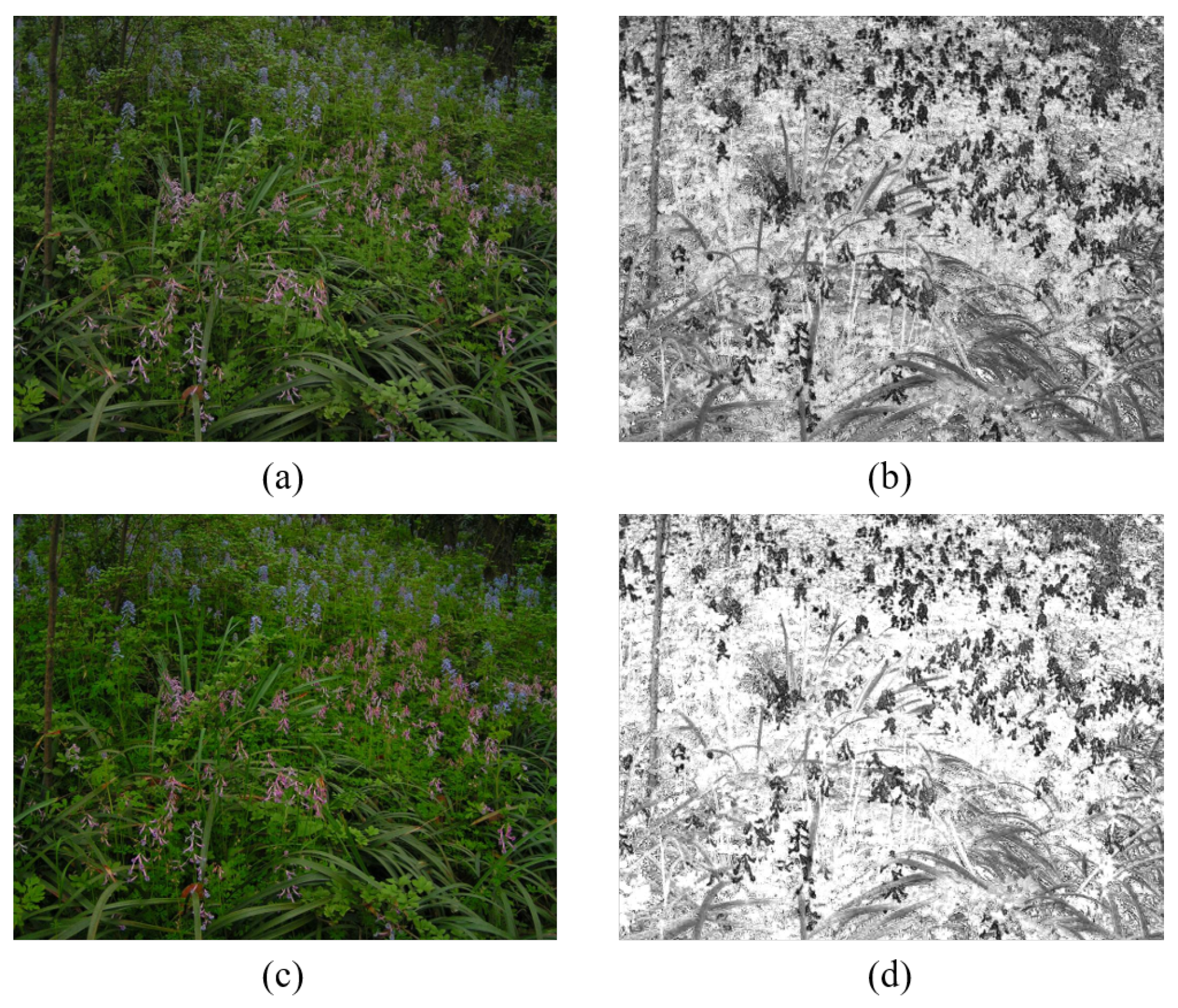
3.2. Estimation of Illumination Components Based on Guided Filtering
3.3. Adaptive Brightness Enhancement
3.4. Image Fusion
3.5. Saturation Enhancement
4. Image Stitching Based on the Proposed Enhancement Algorithm Preprocessing
4.1. Elimination of Mismatch Points by Ransac Algorithm
- Randomly select 4 groups of non-collinear matching point pairs from the rough matching results;
- Solve the projection transformation matrix H according the selected matched pairs of points;
- Among the remaining matching pairs, apply the H derived from the above step to count the reprojection error less than the set threshold of the matching pairs, noting the matching pair as an inner point and counting the number.
- If the number of current interior points is greater than the previous optimal projection transformation, the current projection transformation is recorded as the optimal projection transformation;
- If the current probability is within the range allowed by the model or the number of iterations is greater than the specified number of times, the calculation is completed. If it does not meet the requirements, the above process is repeated until the requirements of the model are met or the specified number of iterations is completed.
4.2. Fusion of Stitched Images
5. Experiments and Discussions
5.1. Experiment Setting
- In order to balance the smoothness of the image and the edge-holding effect, this paper sets the guided filtering parameters as , , , .
- The AIEM algorithm uses the parameters in the authors’ original paper, and the 3 Gaussian scale parameters are: , , , the weights are set as , .
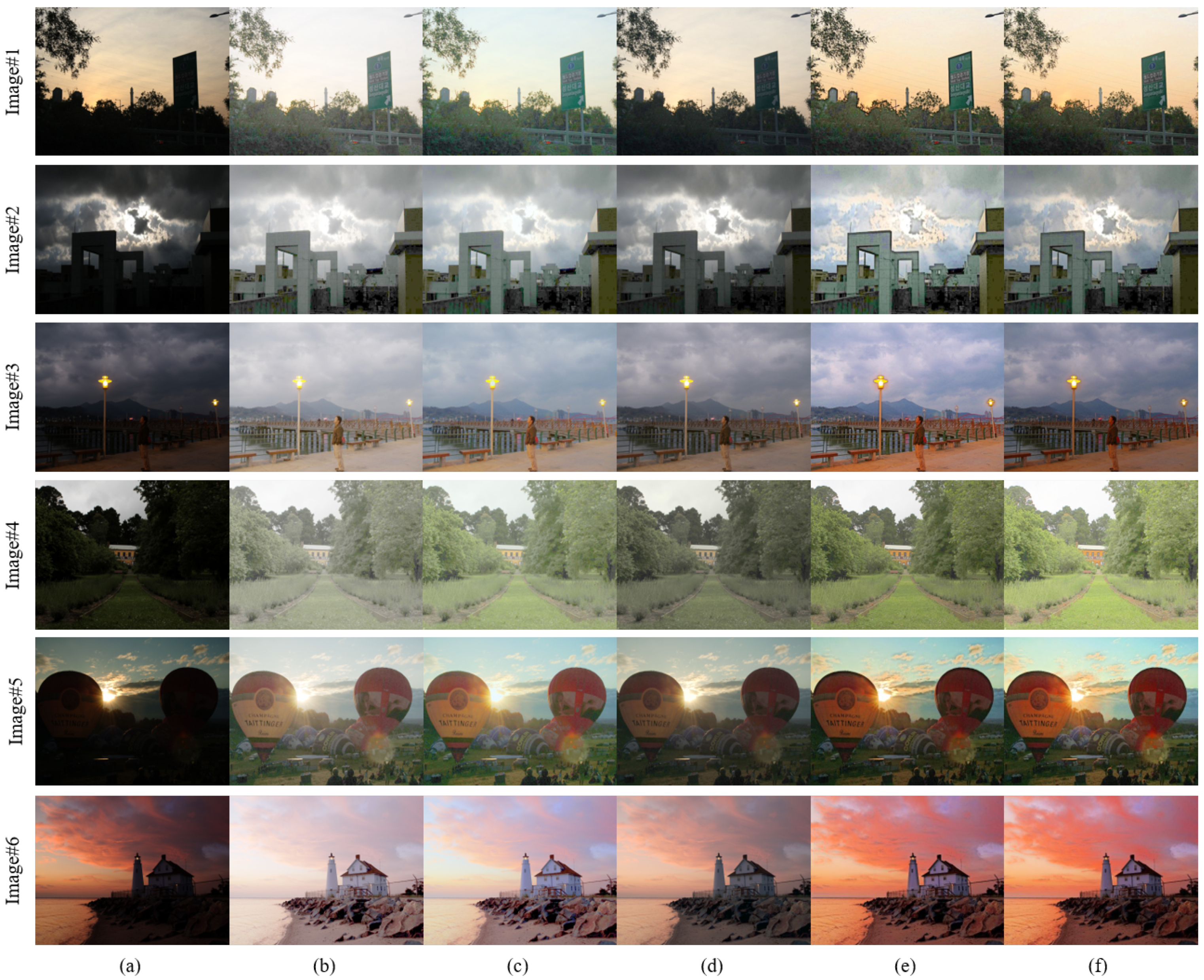
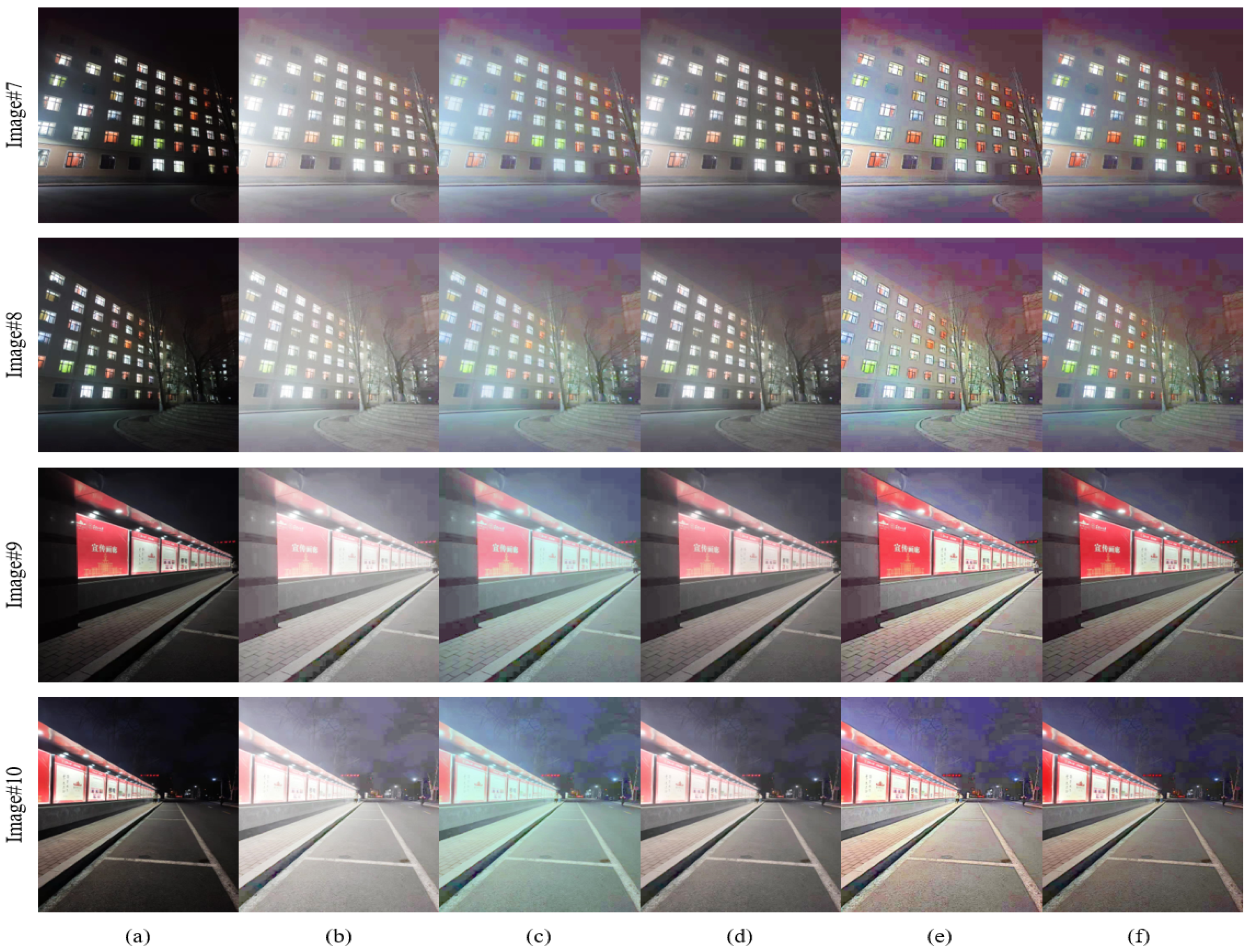
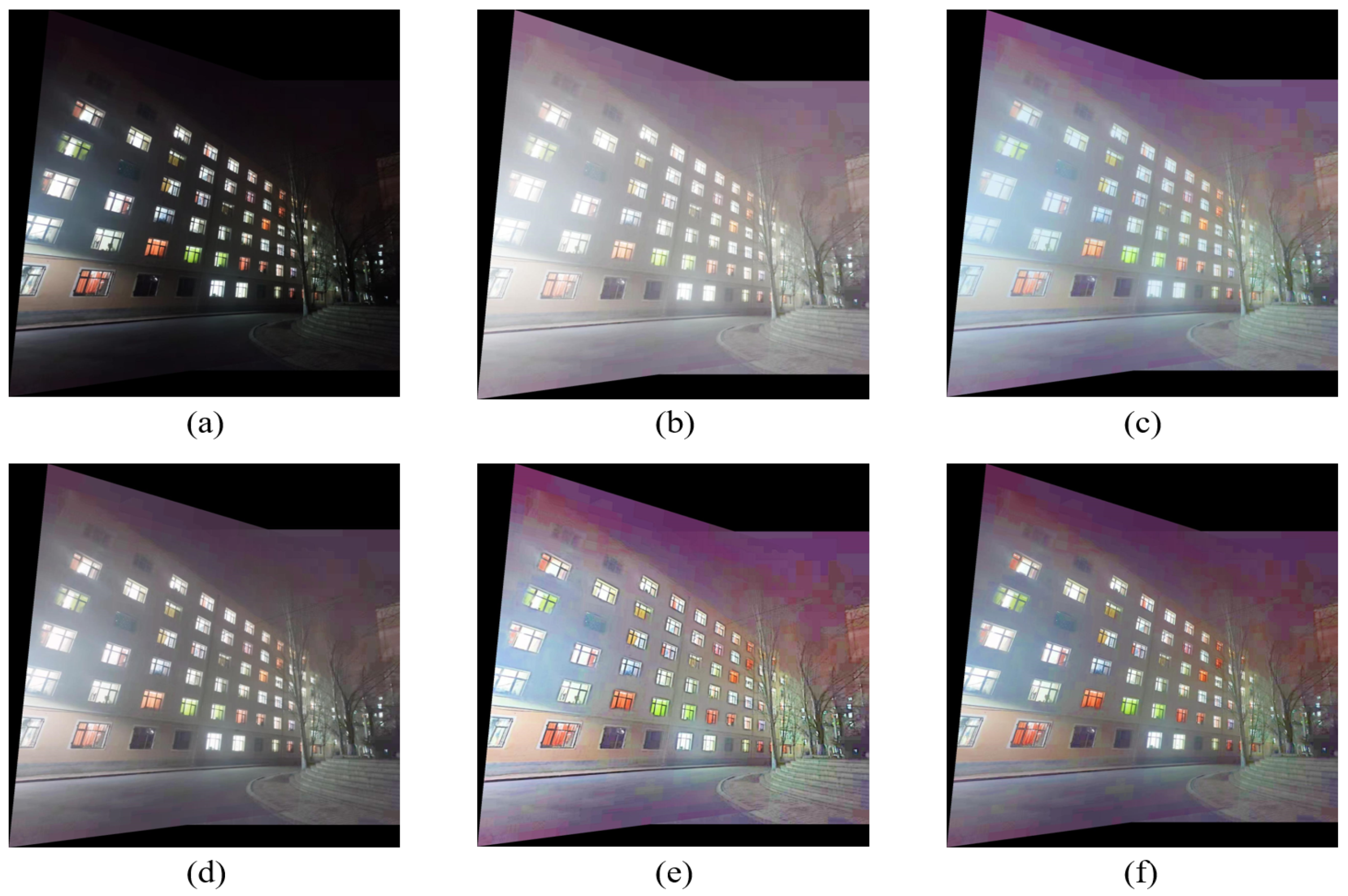
5.2. Subjective Evaluation of Image Enhancement
5.3. Objective Evaluation of Image Enhancement
5.4. Time Complexity
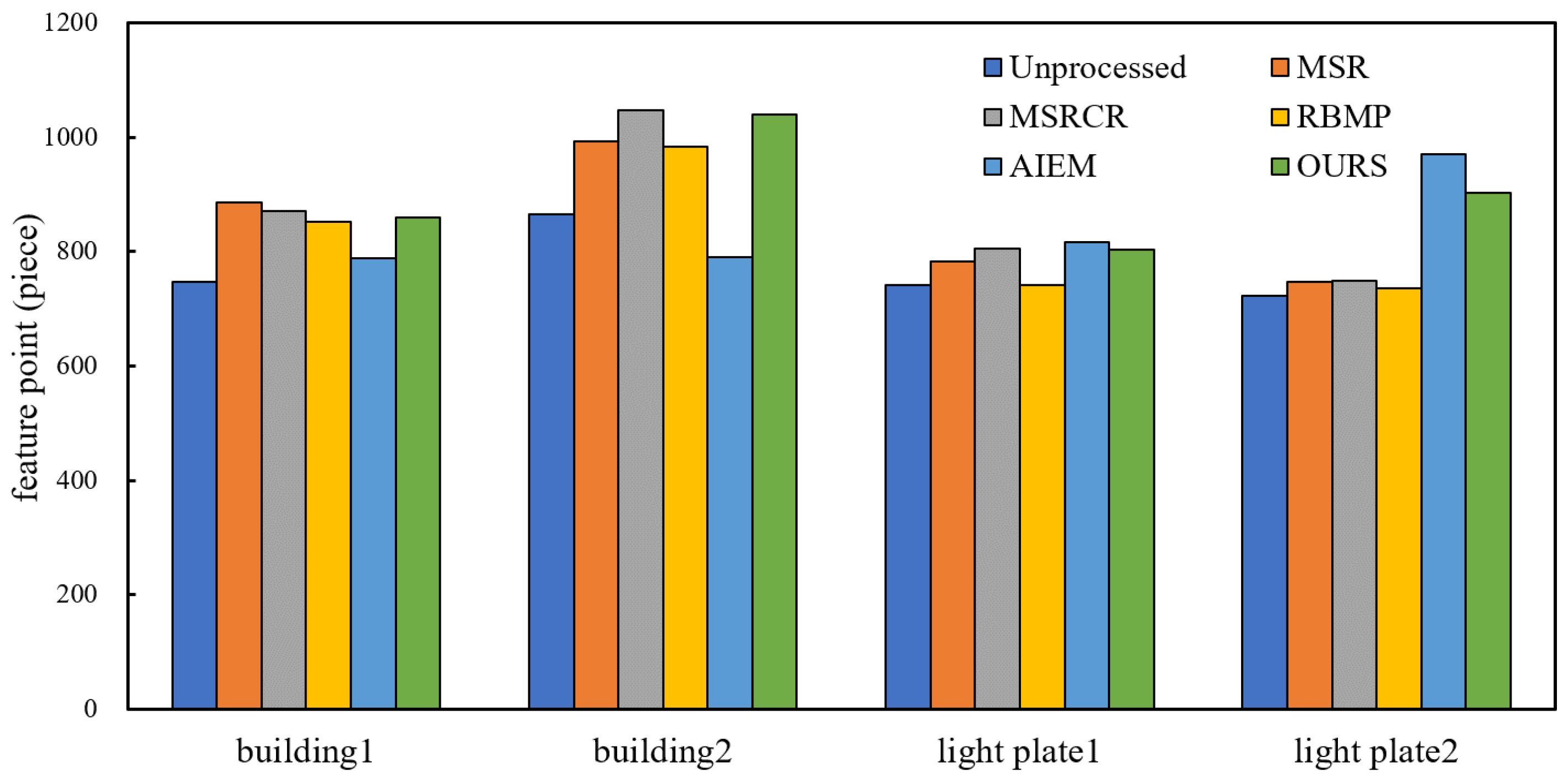
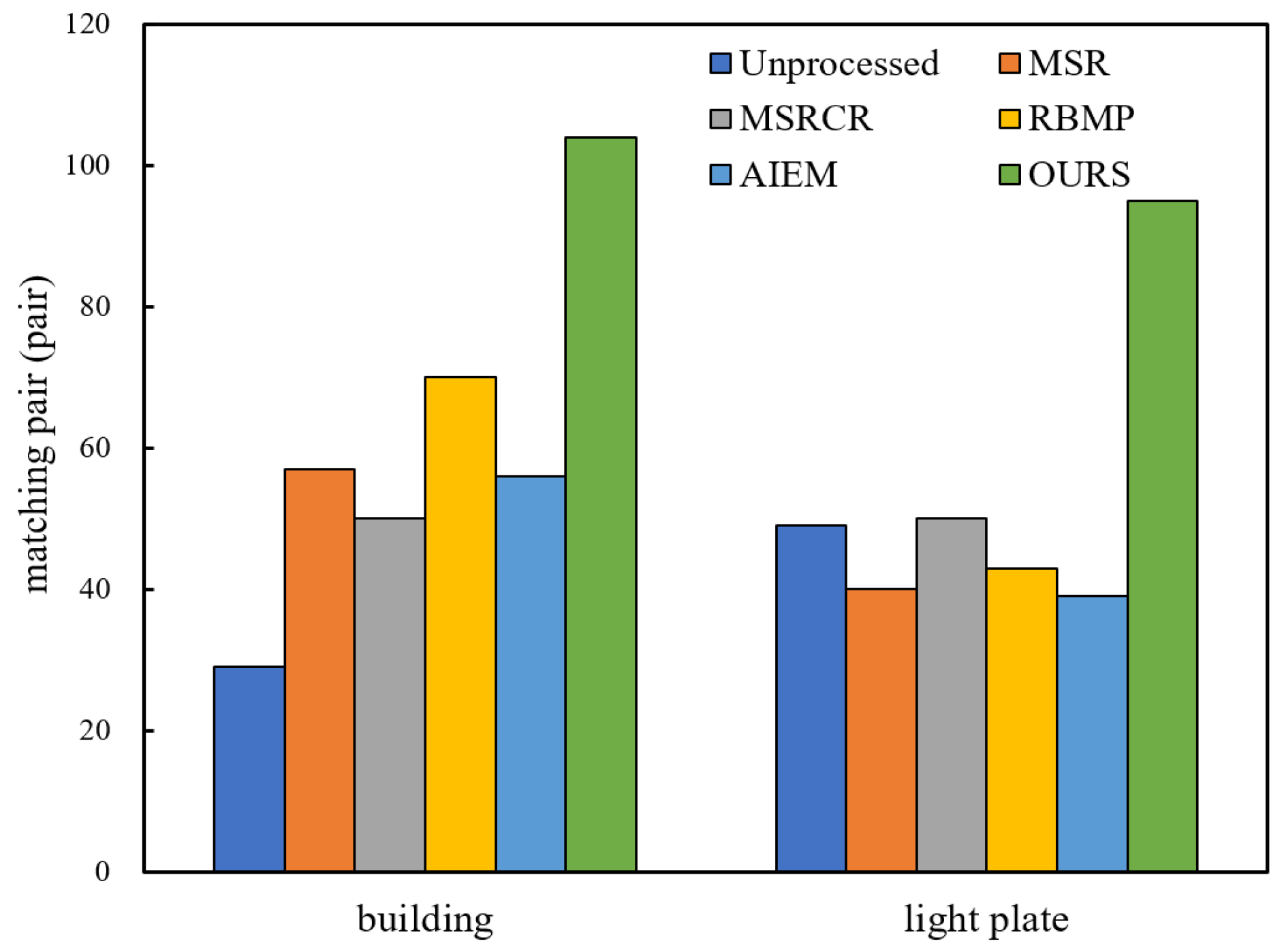
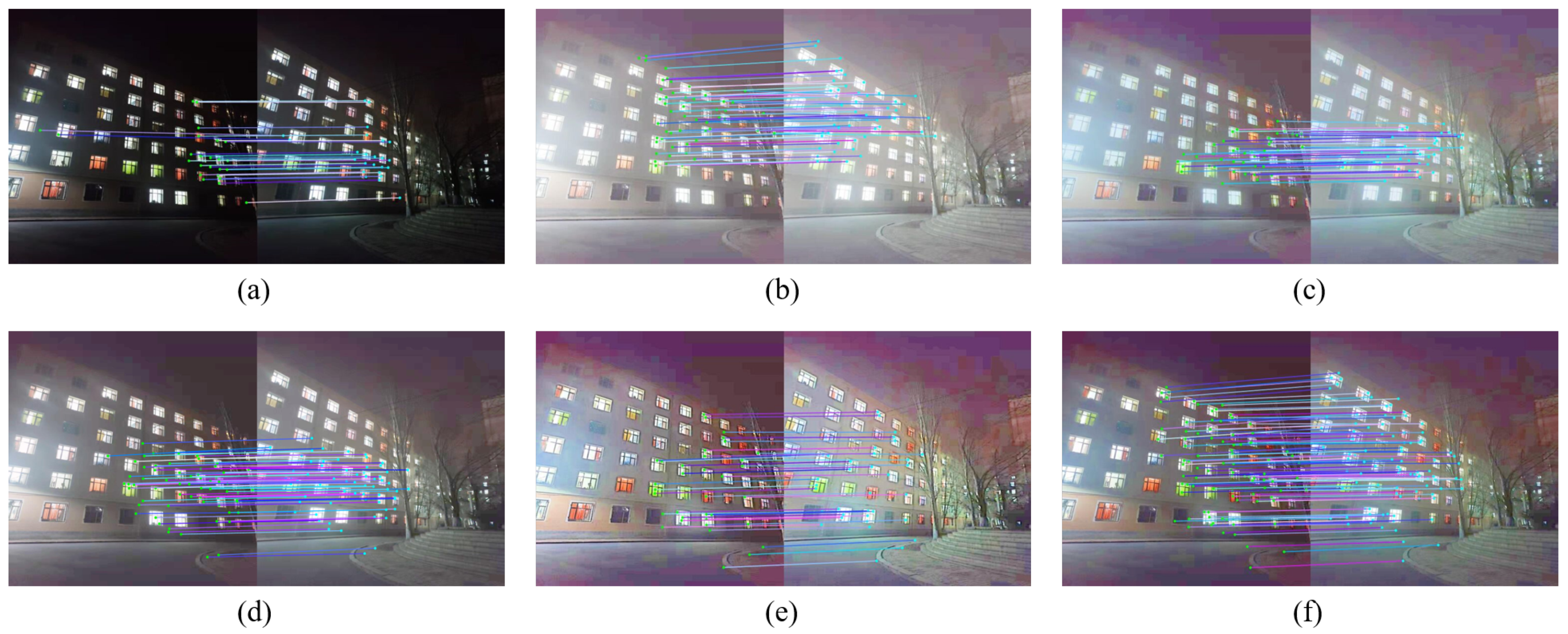
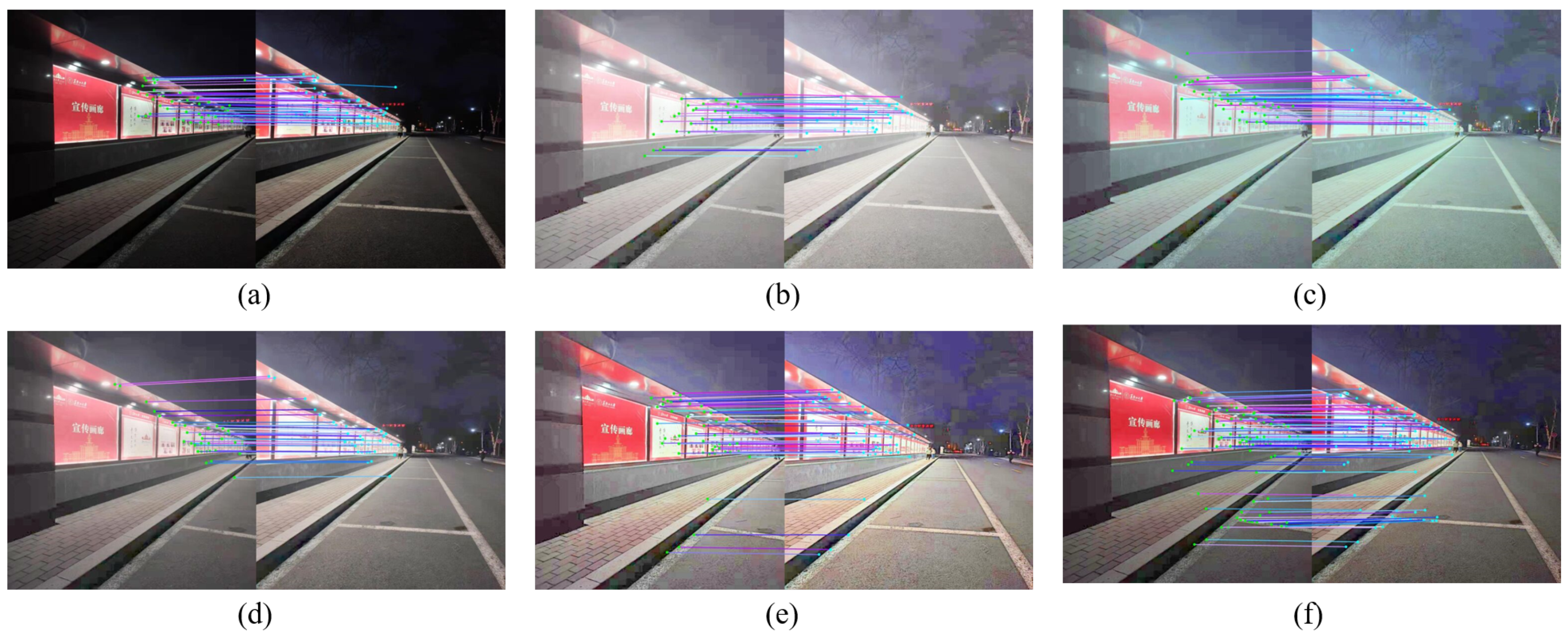
5.5. Feature Matching
5.6. Image Stitching
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Yu, M.; Song, Y. Optimized Seam-Driven Image Stitching Method Based on Scene Depth Information. Electronics 2022, 11, 1876. [Google Scholar] [CrossRef]
- Garg, A.; Dung, L.R. Stitching Strip Determination for Optimal Seamline Search. In Proceedings of the 2020 4th International Conference on Imaging, Signal Processing and Communications (ICISPC), Virtual, 23–25 October 2020; pp. 29–33. [Google Scholar] [CrossRef]
- Huang, Z.; Hui, B.; Sun, S. An Automatic Image Stitching Method for Infrared Image Series. In Proceedings of the 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 14–17 October 2021; pp. 887–891. [Google Scholar]
- Qu, Z.; Li, J.; Bao, K.H.; Si, Z.C. An unordered image stitching method based on binary tree and estimated overlapping area. IEEE Trans. Image Process. 2020, 29, 6734–6744. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Ma, Y.; Mei, X.; Huang, J.; Fan, F. Hyperspectral Image Stitching via Optimal Seamline Detection. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Saad, N.H.; Isa, N.A.M.; Saleh, H.M. Nonlinear Exposure Intensity Based Modification Histogram Equalization for Non-Uniform Illumination Image Enhancement. IEEE Access 2021, 9, 93033–93061. [Google Scholar] [CrossRef]
- Rahman, Z.; Jobson, D.; Woodell, G. Multi-scale retinex for color image enhancement. In Proceedings of the 3rd IEEE International Conference on Image Processing, Lausanne, Switzerland, 16–19 September 1996; Volume 3, pp. 1003–1006. [Google Scholar] [CrossRef]
- Jobson, D.; Rahman, Z.; Woodell, G. A multiscale retinex for bridging the gap between color images and the human observation of scenes. IEEE Trans. Image Process. 1997, 6, 965–976. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Xue, Y.; Dou, X.; Li, Z. Low Illumination Image Enhancement Algorithm Combining Homomorphic Filtering and Retinex. In Proceedings of the 2021 International Conference on Wireless Communications and Smart Grid (ICWCSG), Hangzhou, China, 13–15 August 2021; pp. 241–245. [Google Scholar] [CrossRef]
- Tang, S.; Li, C.; Pan, X. A simple illumination map estimation based on Retinex model for low-light image enhancement. In Proceedings of the 2021 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Online, 23–25 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Al-Ameen, Z. Nighttime image enhancement using a new illumination boost algorithm. IET Image Process. 2019, 13, 1314–1320. [Google Scholar] [CrossRef]
- Qian, S.; Shi, Y.; Wu, H.; Liu, J.; Zhang, W. An adaptive enhancement algorithm based on visual saliency for low illumination images. Appl. Intell. 2022, 52, 1770–1792. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Wu, Q.; Bi, L. An adaptive enhancement method for low illumination color images. Appl. Intell. 2021, 51, 202–222. [Google Scholar] [CrossRef]
- Shan, Q.; Jia, J.; Brown, M.S. Globally Optimized Linear Windowed Tone Mapping. IEEE Trans. Vis. Comput. Graph. 2010, 16, 663–675. [Google Scholar] [CrossRef]
- Hamza, A.B.; Krim, H. A variational approach to maximum a posteriori estimation for image denoising. In Proceedings of the International Workshop on Energy Minimization Methods in Computer Vision and Pattern Recognition, Sophia Antipolis, France, 3–5 September 2001; Springer: Berlin/Heidelberg, Germany, 2001; pp. 19–34. [Google Scholar]
- Ben Hamza, A.; Krim, H.; Zerubia, J. A nonlinear entropic variational model for image filtering. EURASIP J. Adv. Signal Process. 2004, 2004, 540425. [Google Scholar] [CrossRef]
- Niu, G.; Wang, C.; Meng, H. Driver Face Image Enhancement Based on Guided Filter. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI), Bali, Indonesia, 7–9 December 2015; pp. 100–104. [Google Scholar] [CrossRef]
- Wang, S.; Zheng, J.; Hu, H.M.; Li, B. Naturalness Preserved Enhancement Algorithm for Non-Uniform Illumination Images. IEEE Trans. Image Process. 2013, 22, 3538–3548. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, W.; Bi, W.; Gao, G. Colorful image enhancement algorithm based on guided filter and Retinex. In Proceedings of the 2016 IEEE International Conference on Signal and Image Processing (ICSIP), Beijing, China, 13–15 August 2016; pp. 33–36. [Google Scholar] [CrossRef]
- Shi, Z.; Guo, B.; Zhao, M.; Zhang, C. Nighttime low illumination image enhancement with single image using bright/dark channel prior. EURASIP J. Image Video Process. 2018, 2018, 13. [Google Scholar] [CrossRef]
- Liang, W.; Long, J.; Li, K.C.; Xu, J.; Lei, X. A Fast Defogging Image Recognition Algorithm based on Bilateral Hybrid Filtering. ACM Trans. Multimed. Comput. Commun. Appl. 2020, 17, 42. [Google Scholar] [CrossRef]
- Wang, W.; Chen, Z.; Yuan, X.; Wu, X. Adaptive image enhancement method for correcting low-illumination images. Inf. Sci. 2019, 496, 25–41. [Google Scholar] [CrossRef]
- Al-Hashim, M.A.; Al-Ameen, Z. Retinex-Based Multiphase Algorithm for Low-Light Image Enhancement. Trait. Signal 2020, 37, 733–743. [Google Scholar] [CrossRef]
- Lee, C.; Lee, C.; Lee, Y.Y.; Kim, C.S. Power-Constrained Contrast Enhancement for Emissive Displays Based on Histogram Equalization. IEEE Trans. Image Process. 2012, 21, 80–93. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Zhang, Y. Infrared Image Enhancement Algorithm based on Weighted Guided Filtering. In Proceedings of the 2021 IEEE 2nd International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 17–19 December 2021; Volume 2, pp. 332–336. [Google Scholar] [CrossRef]
- Li, W.; Yi, B.; Huang, T.; Yao, W.; Peng, H. A Tone Mapping Algorithm Based on Multi-scale Decomposition. KSII Trans. Internet Inf. Syst. 2016, 10, 1846–1863. [Google Scholar] [CrossRef]
- Tan, S.F.; Isa, N.A.M. Exposure Based Multi-Histogram Equalization Contrast Enhancement for Non-Uniform Illumination Images. IEEE Access 2019, 7, 70842–70861. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Index | Methods | AVG | AG | IE | PSNR |
|---|---|---|---|---|---|
| Image#1 | Unprocessed | 106.2343 | 8.3369 | 6.9185 | |
| MSR | 175.9547 | 8.7906 | 6.4680 | 10.3850 | |
| MSRCR | 168.3584 | 8.2684 | 7.0153 | 11.3675 | |
| RBMP | 135.2965 | 8.9986 | 6.9556 | 17.2985 | |
| AIEM | 147.3297 | 14.3700 | 7.5040 | 14.0416 | |
| OURS | 144.5374 | 13.2811 | 7.3775 | 14.5312 | |
| Image#2 | Unprocessed | 48.2641 | 2.0051 | 6.8375 | |
| MSR | 145.1272 | 3.3525 | 6.5330 | 7.8575 | |
| MSRCR | 143.5546 | 3.3842 | 7.3012 | 8.0074 | |
| RBMP | 104.2055 | 2.7525 | 6.7742 | 12.4023 | |
| AIEM | 148.2635 | 5.5219 | 7.4767 | 7.3040 | |
| OURS | 120.7855 | 4.4995 | 7.4282 | 10.1089 | |
| Image#3 | Unprocessed | 48.2371 | 1.3825 | 6.7409 | |
| MSR | 166.7816 | 2.4035 | 7.0180 | 6.6202 | |
| MSRCR | 149.7294 | 2.3618 | 7.0570 | 7.8877 | |
| RBMP | 119.2852 | 2.1157 | 7.2369 | 11.0260 | |
| AIEM | 144.3214 | 4.1107 | 7.4897 | 8.2008 | |
| OURS | 106.7472 | 2.9637 | 7.2551 | 12.5561 | |
| Image#4 | Unprocessed | 42.8373 | 2.1314 | 6.0142 | |
| MSR | 155.9016 | 3.5015 | 6.7860 | 6.9969 | |
| MSRCR | 154.5647 | 3.4134 | 7.0101 | 7.3259 | |
| RBMP | 103.6729 | 3.5788 | 6.8242 | 11.9598 | |
| AIEM | 117.5364 | 5.9300 | 7.1468 | 10.0802 | |
| OURS | 152.4410 | 7.2409 | 7.2610 | 6.8059 | |
| Image#5 | Unprocessed | 41.5932 | 2.6622 | 6.0279 | |
| MSR | 132.5138 | 5.4725 | 6.1532 | 8.6901 | |
| MSRCR | 128.1398 | 6.6046 | 5.7902 | 9.1541 | |
| RBMP | 91.5238 | 4.3335 | 7.4906 | 13.3060 | |
| AIEM | 95.9058 | 5.2659 | 7.4171 | 12.0187 | |
| OURS | 108.3902 | 6.0585 | 7.4950 | 10.1912 | |
| Image#6 | Unprocessed | 68.7553 | 2.9095 | 7.4913 | |
| MSR | 163.0143 | 4.0134 | 7.1714 | 7.2353 | |
| MSRCR | 172.4398 | 3.9305 | 7.4066 | 7.9513 | |
| RBMP | 121.1455 | 3.5583 | 7.5343 | 13.2318 | |
| AIEM | 120.7220 | 5.2254 | 7.7427 | 12.5621 | |
| OURS | 119.3843 | 4.8976 | 7.8425 | 12.6054 |
| Image Index | Methods | AVG | AG | IE | PSNR |
|---|---|---|---|---|---|
| Image#7 | Unprocessed | 41.3997 | 2.9346 | 6.4685 | |
| MSR | 150.8871 | 2.1873 | 7.0354 | 7.0697 | |
| MSRCR | 134.3781 | 2.1236 | 7.1479 | 8.2082 | |
| RBMP | 105.6925 | 2.6895 | 7.1079 | 11.8398 | |
| AIEM | 123.9911 | 4.3936 | 7.3721 | 9.3905 | |
| OURS | 102.2740 | 3.5814 | 7.1135 | 12.1219 | |
| Image#8 | Unprocessed | 41.0353 | 2.5788 | 6.3299 | |
| MSR | 157.8570 | 1.9959 | 6.8064 | 6.5846 | |
| MSRCR | 143.3581 | 1.9618 | 6.9119 | 7.6316 | |
| RBMP | 110.1061 | 2.4717 | 6.9227 | 11.1967 | |
| AIEM | 135.3832 | 4.2874 | 7.2146 | 8.3248 | |
| OURS | 110.3024 | 3.2543 | 6.9137 | 11.0764 | |
| Image#9 | Unprocessed | 48.8969 | 2.8815 | 6.8573 | |
| MSR | 158.1191 | 2.4676 | 7.3004 | 7.0982 | |
| MSRCR | 143.4791 | 2.5297 | 7.3939 | 8.2073 | |
| RBMP | 109.2115 | 2.8726 | 7.0313 | 12.3069 | |
| AIEM | 133.7210 | 4.9648 | 7.5166 | 8.9848 | |
| OURS | 92.9747 | 4.0274 | 7.2507 | 14.6012 | |
| Image#10 | Unprocessed | 48.8969 | 3.9367 | 7.0113 | |
| MSR | 165.9230 | 3.4260 | 7.2678 | 7.0697 | |
| MSRCR | 149.2280 | 3.4045 | 7.3891 | 8.2082 | |
| RBMP | 117.8824 | 4.1512 | 7.3876 | 12.0753 | |
| AIEM | 141.2429 | 7.0486 | 7.5878 | 8.9907 | |
| OURS | 99.3570 | 5.6238 | 7.4180 | 14.8902 |
| Image Index | Size | MSR (s) | MSRCR (s) | RBMP (s) | AIEM (s) | OURS (s) |
|---|---|---|---|---|---|---|
| Image#1 | 533 × 800 | 0.5618 | 1.1672 | 0.7213 | 0.5870 | 0.3854 |
| Image#2 | 399 × 700 | 0.5216 | 0.9731 | 0.5211 | 0.3967 | 0.2399 |
| Image#3 | 960 × 1280 | 1.1909 | 1.7947 | 1.1530 | 0.8450 | 0.9827 |
| Image#4 | 1728 × 2592 | 3.4892 | 5.8912 | 3.2968 | 3.8341 | 3.5704 |
| Image#5 | 339 × 512 | 0.4320 | 0.7815 | 0.5012 | 0.3445 | 0.2308 |
| Image#6 | 340 × 512 | 0.2708 | 0.7146 | 0.5434 | 0.3635 | 0.2313 |
| Image#7 | 1280 × 916 | 1.4676 | 2.8420 | 1.3880 | 1.2532 | 0.9239 |
| Image#8 | 1280 × 916 | 1.4965 | 2.8091 | 1.2366 | 1.1743 | 0.9160 |
| Image#9 | 1280 × 916 | 1.4500 | 2.8855 | 1.2483 | 1.2714 | 0.9767 |
| Image#10 | 1280 × 916 | 1.6385 | 2.8574 | 1.2577 | 1.2801 | 0.9079 |
| Image Index | Methods | AVG | AG | IE | PSNR |
|---|---|---|---|---|---|
| building | Unprocessed | 37.0289 | 1.8757 | 5.9837 | |
| MSR | 127.5154 | 1.6164 | 6.3534 | 7.7301 | |
| MSRCR | 115.3205 | 1.5652 | 6.3684 | 8.9447 | |
| RBMP | 90.8140 | 1.8731 | 6.4962 | 11.9741 | |
| AIEM | 108.2368 | 3.0621 | 6.6693 | 9.5082 | |
| OURS | 88.4005 | 2.3571 | 6.4294 | 12.3991 | |
| light plate | Unprocessed | 36.1945 | 1.8956 | 6.1002 | |
| MSR | 122.8710 | 1.9617 | 6.5805 | 8.0107 | |
| MSRCR | 109.6623 | 1.8978 | 6.5875 | 9.1976 | |
| RBMP | 83.1930 | 2.1151 | 6.6198 | 13.0639 | |
| AIEM | 109.0777 | 4.0151 | 7.0048 | 9.1821 | |
| OURS | 72.6646 | 2.9110 | 6.6502 | 13.9791 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, M.; Qin, D.; Zhang, G.; Zheng, P.; Bai, J.; Ma, L. Nighttime Image Stitching Method Based on Guided Filtering Enhancement. Entropy 2022, 24, 1267. https://doi.org/10.3390/e24091267
Yan M, Qin D, Zhang G, Zheng P, Bai J, Ma L. Nighttime Image Stitching Method Based on Guided Filtering Enhancement. Entropy. 2022; 24(9):1267. https://doi.org/10.3390/e24091267
Chicago/Turabian StyleYan, Mengying, Danyang Qin, Gengxin Zhang, Ping Zheng, Jianan Bai, and Lin Ma. 2022. "Nighttime Image Stitching Method Based on Guided Filtering Enhancement" Entropy 24, no. 9: 1267. https://doi.org/10.3390/e24091267
APA StyleYan, M., Qin, D., Zhang, G., Zheng, P., Bai, J., & Ma, L. (2022). Nighttime Image Stitching Method Based on Guided Filtering Enhancement. Entropy, 24(9), 1267. https://doi.org/10.3390/e24091267