




A Dual-Population-Based NSGA-III for Constrained Many-Objective Optimization

Abstract
:1. Introduction
- 1.
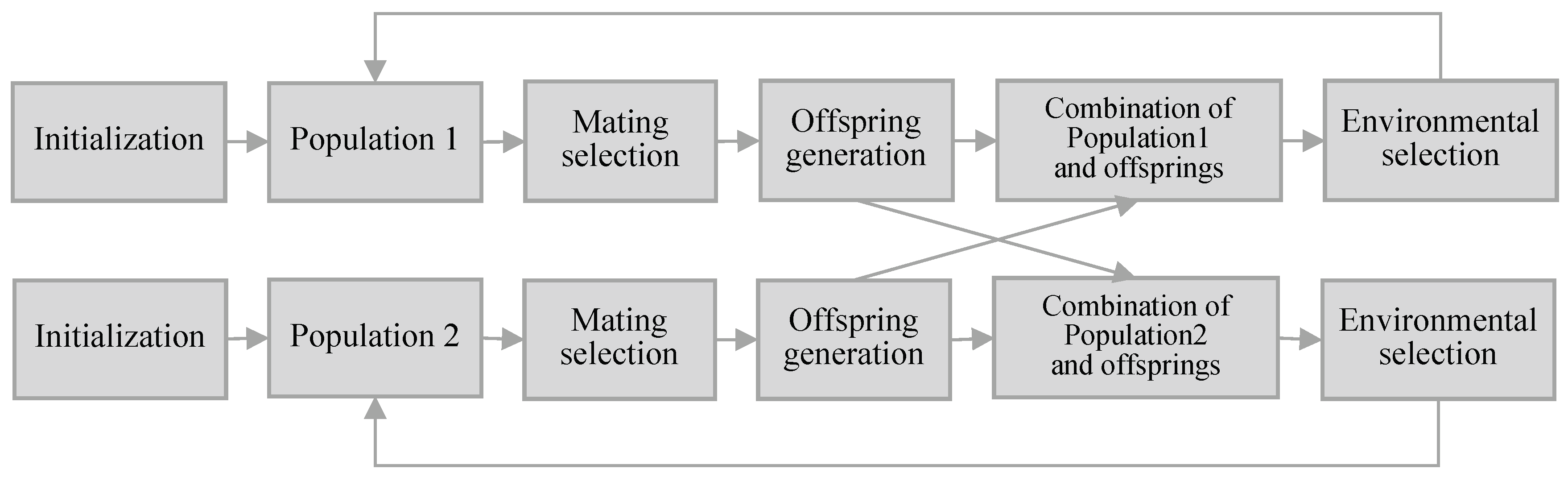
- To take advantage of the infeasible solution with excellent objectives, we introduce an auxiliary population, and its environmental selection [13] is different from the main population, using p-norm to select individuals. Two populations cooperate by exchanging offspring. Each population can evolve more efficiently using information from the other population. Specifically, Population1 is the main population, which finds the CPF by the -constraint handling method. Population2 with less convergence pressure is the auxiliary population, which will eventually converge to UPF due to the neglected constraints.
- 2.
- From the point of view of the problem, neither population solves the original CMaOPs. Since the -constraint boundary replaces the original constraint, Population1 solves a problem with looser constraints than the original problem and is equivalent to the original problem at the end of evolution. Population2 solves the unconstrained problem corresponding to the original problem. This strategy indirectly solves the original CMaOPs.
- 3.
- To make the main population of DP-NSGA-III infeasibility-driven, we design a monotonically decreasing -constraint handling function that takes no additional parameters. That is, the -bounded boundary is larger in the early period and close to 0 in the late period. Therefore, this function has a greater impact in the early evolutionary period. The function aims to involve partially infeasible solutions in the evolution, balancing convergence and diversity by using excellent infeasible solutions.
2. Related Work
3. Proposed Algorithm: DP-NSGA-III
3.1. Constraint Handling
3.2. Mating Selection and Offspring Reproduction
| Algorithm1: Tournament selection of Population1 |
 |
3.3. Environmental Selection of Population1
| Algorithm2: Reference-point-based nondominated sorting |
 |
3.4. Environmental Selection of Population2
3.4.1. The p-Norm of the First Front
3.4.2. Survival Score
| Algorithm3: Survival Score of |
 |
3.5. Discussion
3.6. Time Complexity of DP-NSGA-III
4. Experimental Setup
4.1. Test Instances
4.2. Performance Metrics
- (1)
- Inverted Generational Distance (IGD) [28]: Given as a set of points uniformly sampled along the PF and P as the set of solutions obtained from an evolutionary algorithm. The IGD value of P is calculated aswhere dist is the Euclidean distance between and its nearest neighbor in P.
- (2)
- Hypervolume (HV) [29]: Let be the worst point dominated by all the Pareto optimal objective vectors. The HV of P is defined as the volume of the objective space dominated by solutions in P and bounded by
4.3. Algorithms for Comparison
- DCNSGA-III: It is an improved NSGA-III that uses dynamic multi-objective techniques to solve CMaOPs. It is more suitable for processing CMaOPs than NSGA-III due to the upgrade of the constraint processing method.
- MOEA/D-2WA: It is a modified MOEA/D using two-type weight adjustments. During the search, the number of infeasible weights is dynamically lowered to help infeasible solutions with greater convergence transcend the infeasible areas, as well as to help infeasible solutions with better diversity identify many feasible sub regions.
4.4. Parameter Settings
- (1)
- Algorithms and reproduction operators: To make a fair comparison and ensure the performance of each algorithm, the parameters of all the compared algorithm and their reproduction operator parameters, such as the simulated binary crossover and polynomial mutation, are set as suggested in their original papers. All the compared algorithms were implemented in PlatEMO [32].
- (2)
- Population size and the number of function evaluations: Table 1 shows the number of reference points and population size of each algorithm for different numbers of objectives M [11,27]. The number of function evaluations is the termination condition of all algorithms [11,27]. The details are shown in Table 2.
5. Experimental Results
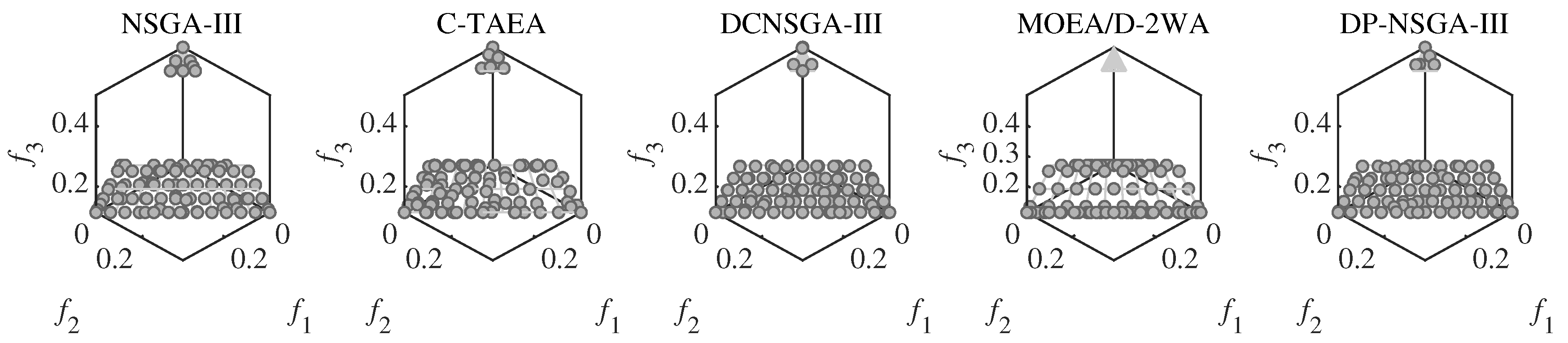
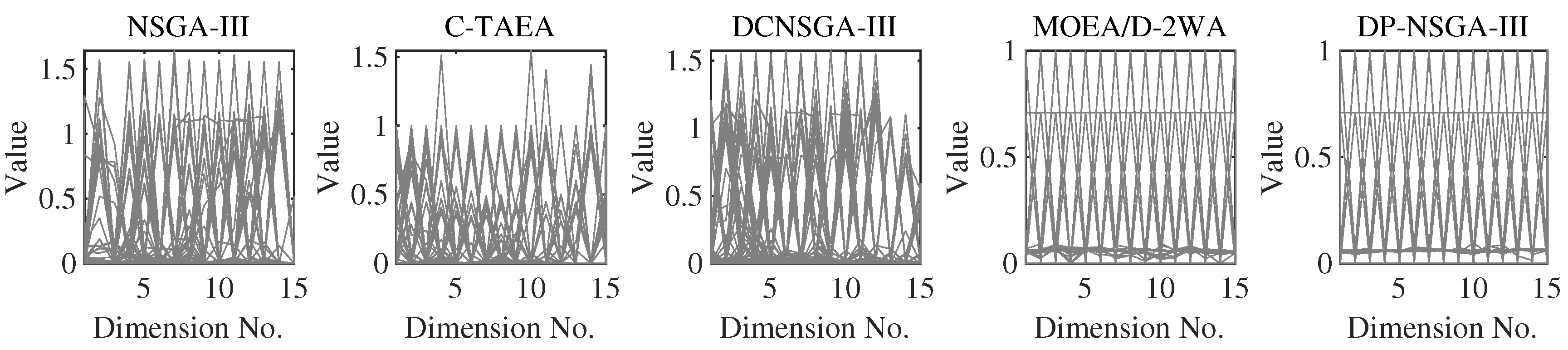
5.1. Performance on C-DTLZ Suite
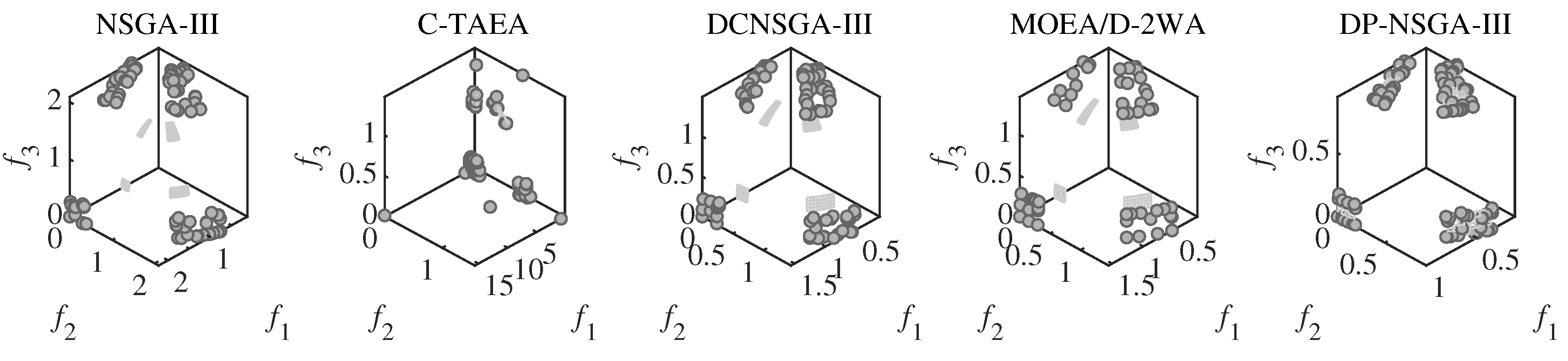
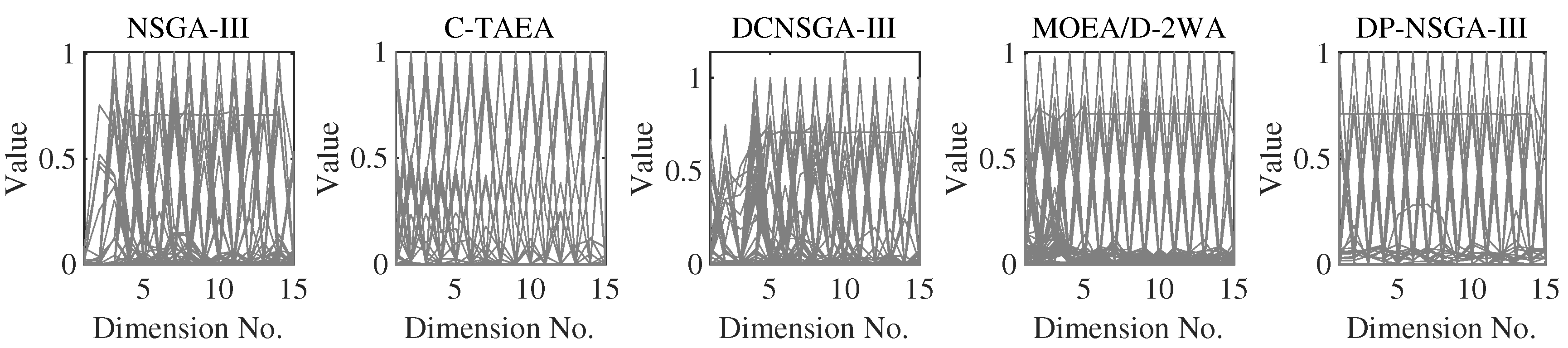
5.2. Performance on DC-DTLZ Suite
5.3. Performance on MW Suite
5.4. Stability of DP-NSGA-III
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CMOP | Constrained multi-objective optimization problem |
| CMaOP | Constrained many-objective optimization problem |
| CMOEA | Constrained multi-objective evolutionary algorithm |
| CMaOEA | Constrained many-objective evolutionary algorithm |
| CDP | Constraint-dominance principle |
| PF | Pareto front |
| UPF | Unconstrained Pareto front |
| CPF | Constrained Pareto front |
| IGD | Inverted generational distance |
| HV | Hypervolume |
| PCP | Parallel coordinate plot |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problem | M | NSGA-III | C-TAEA | DCNSGA-III | MOEA/D-2WA | DP-NSGA-III |
|---|---|---|---|---|---|---|
| C1DTLZ1 | 3 | 2.0316 × 10(1.66 × 10)= | 2.3218 × 10(5.64 × 10)- | 2.0292 × 10(1.01 × 10)= | 2.0347 × 10(1.06 × 10)= | 2.0342 × 10(9.94 × 10) |
| 5 | 5.2160 × 10(2.95 × 10)- | 5.9101 × 10(8.92 × 10)- | 5.2108 × 10(3.15 × 10)- | 5.1891 × 10(2.70 × 10)= | 5.1815 × 10(2.52 × 10) | |
| 10 | 1.0934 × 10(3.38 × 10)- | 1.3960 × 10(2.37 × 10)- | 1.1167 × 10(7.28 × 10)- | 1.0487 × 10(5.67 × 10)+ | 1.0799 × 10(5.86 × 10) | |
| 15 | 1.8281 × 10(3.39 × 10)- | 2.1208 × 10(7.95 × 10)- | 1.8062 × 10(7.67 × 10)= | 1.3518 × 10(4.24 × 10)+ | 1.7936 × 10(4.43 × 10) | |
| C1DTLZ3 | 3 | 3.2850 × 10(3.93 × 10)- | 7.3722 × 10(1.25 × 10)- | 5.1328 × 10(3.85 × 10)- | 4.3406 × 10(4.00 × 10)- | 5.4508 × 10(2.67 × 10) |
| 5 | 4.9508 × 10(5.52 × 10)- | 8.9646 × 10(4.88 × 10)- | 5.7600 × 10(5.56 × 10)- | 6.2536 × 10(5.77 × 10)- | 1.6513 × 10(5.32 × 10) | |
| 10 | 5.0854 × 10(6.58 × 10)- | 1.1983 × 10(5.15 × 10)- | 6.6092 × 10(6.80 × 10)- | 1.1406 × 10(5.59 × 10)- | 4.2023 × 10(4.00 × 10) | |
| 15 | 1.2705 × 10(4.54 × 10)- | 1.1425 × 10(5.39 × 10)- | 1.2603 × 10(4.75 × 10)- | 1.3781 × 10(2.49 × 10)- | 6.2255 × 10(9.07 × 10) | |
| C2DTLZ2 | 3 | 4.8008 × 10(4.54 × 10)- | 5.7025 × 10(1.50 × 10)- | 4.7951 × 10(4.62 × 10)- | 4.9627 × 10(4.03 × 10)- | 4.7472 × 10(4.66 × 10) |
| 5 | 1.3891 × 10(2.42 × 10)- | 1.4714 × 10(1.25 × 10)- | 1.3881 × 10(3.48 × 10)- | 1.3911 × 10(6.53 × 10)- | 1.3759 × 10(6.92 × 10) | |
| 10 | 3.3032 × 10(1.65 × 10)- | 3.4636 × 10(3.60 × 10)- | 2.6499 × 10(2.11 × 10)- | 2.8945 × 10(6.53 × 10)= | 2.5890 × 10(2.36 × 10) | |
| 15 | 4.0334 × 10(1.69 × 10)- | 2.7026 × 10(5.04 × 10)+ | 3.3055 × 10(7.04 × 10)- | 3.3590 × 10(1.19 × 10)- | 2.7237 × 10(2.85 × 10) | |
| C3DTLZ4 | 3 | 2.1730 × 10(2.85 × 10)- | 1.1259 × 10(2.48 × 10)= | 1.4665 × 10(1.89 × 10)- | 5.7976 × 10(9.37 × 10)+ | 1.4219 × 10(4.48 × 10) |
| 5 | 2.4579 × 10(8.96 × 10)+ | 2.9056 × 10(2.02 × 10)- | 2.8371 × 10(1.09 × 10)- | 2.4406 × 10(4.52 × 10)+ | 2.5222 × 10(4.96 × 10) | |
| 10 | 5.7797 × 10(4.66 × 10)+ | 6.2424 × 10(4.86 × 10)- | 7.0682 × 10(6.66 × 10)- | 5.6050 × 10(1.92 × 10)+ | 6.0233 × 10(4.34 × 10) | |
| 15 | 8.8829 × 10(5.01 × 10)- | 8.0495 × 10(3.51 × 10)+ | 8.7126 × 10(6.00 × 10)- | 8.0516 × 10(3.61 × 10)+ | 8.2850 × 10(6.02 × 10) | |
| +/−/= | 2/13/1 | 2/13/1 | 0/14/2 | 6/7/3 | ||
| Problem | M | NSGA-III | C-TAEA | DCNSGA-III | MOEA/D-2WA | DP-NSGA-III |
|---|---|---|---|---|---|---|
| C1DTLZ1 | 3 | 8.3136 × 10(8.55 × 10)- | 8.3071 × 10(6.34 × 10)- | 8.3558 × 10(3.94 × 10)= | 8.3578 × 10(4.04 × 10)= | 8.3647 × 10(4.30 × 10) |
| 5 | 9.7520 × 10(3.95 × 10)= | 9.7465 × 10(4.62 × 10)= | 9.7625 × 10(4.68 × 10)= | 9.7527 × 10(3.61 × 10)= | 9.7538 × 10(3.26 × 10) | |
| 10 | 9.9394 × 10(6.75 × 10)- | 9.9842 × 10(1.32 × 10)= | 9.9659 × 10(3.92 × 10)- | 9.8515 × 10(8.06 × 10)- | 9.9867 × 10(8.77 × 10) | |
| 15 | 9.9446 × 10(6.76 × 10)- | 9.9484 × 10(7.10 × 10)- | 9.9862 × 10(2.56 × 10)- | 8.9223 × 10(2.59 × 10)- | 9.9985 × 10(7.57 × 10) | |
| C1DTLZ3 | 3 | 3.0072 × 10(2.78 × 10)- | 5.3960 × 10(9.57 × 10)- | 1.8095 × 10(2.62 × 10)- | 2.2632 × 10(2.76 × 10)- | 5.5855 × 10(6.05 × 10) |
| 5 | 3.6162 × 10(3.96 × 10)- | 1.7036 × 10(3.14 × 10)- | 2.7564 × 10(3.78 × 10)- | 3.4886 × 10(3.91 × 10)- | 8.1262 × 10(4.19 × 10) | |
| 10 | 5.8279 × 10(4.74 × 10)- | 8.4921 × 10(2.46 × 10)- | 4.0252 × 10(4.69 × 10)- | 1.9396 × 10(3.95 × 10)- | 9.6961 × 10(2.85 × 10) | |
| 15 | 9.5280 × 10(2.91 × 10)- | 5.5117 × 10(2.10 × 10)- | 1.1506 × 10(3.01 × 10)- | 3.3022 × 10(1.81 × 10)- | 9.9059 × 10(1.37 × 10) | |
| C2DTLZ2 | 3 | 5.0609 × 10(1.76 × 10)+ | 5.0209 × 10(3.47 × 10)- | 5.0232 × 10(2.22 × 10)- | 5.1261 × 10(6.12 × 10)+ | 5.0530 × 10(1.20 × 10) |
| 5 | 75624 × 10(5.87 × 10)+ | 7.3985 × 10(1.77 × 10)- | 7.5597 × 10(6.33 × 10)+ | 7.4867 × 10(1.36 × 10)+ | 7.4777 × 10(1.18 × 10) | |
| 10 | 8.4100 × 10(1.74 × 10)- | 8.7347 × 10(4.96 × 10)- | 8.9450 × 10(1.44 × 10)- | 8.1762 × 10(1.29 × 10)- | 8.9540 × 10(1.64 × 10) | |
| 15 | 8.7433 × 10(1.84 × 10)- | 9.3273 × 10(3.23 × 10)- | 9.2978 × 10(2.75 × 10)- | 8.3762 × 10(2.39 × 10)- | 9.5717 × 10(3.37 × 10) | |
| C3DTLZ4 | 3 | 7.5074 × 10(1.00 × 10)- | 7.8462 × 10(1.02 × 10)+ | 7.7286 × 10(6.60 × 10)+ | 8.0612 × 10(8.42 × 10)+ | 7.6916 × 10(1.83 × 10) |
| 5 | 9.6435 × 10(5.90 × 10)+ | 9.5697 × 10(6.41 × 10)- | 9.5681 × 10(1.85 × 10)- | 9.6535 × 10(2.08 × 10)+ | 9.6111 × 10(1.78 × 10) | |
| 10 | 9.9912 × 10(1.35 × 10)+ | 9.9904 × 10(4.95 × 10)+ | 9.9549 × 10(6.71 × 10)- | 9.9947 × 10(1.94 × 10)+ | 9.9891 × 10(1.22 × 10) | |
| 15 | 9.9929 × 10(6.53 × 10)- | 9.9997 × 10(5.39 × 10)+ | 9.9924 × 10(1.62 × 10)- | 9.9975 × 10(7.88 × 10)+ | 9.9942 × 10(2.61 × 10) | |
| +/−/= | 4/11/1 | 3/11/2 | 2/12/2 | 6/8/2 | ||
| Problem | M | NSGA-III | C-TAEA | DCNSGA-III | MOEA/D-2WA | DP-NSGA-III |
|---|---|---|---|---|---|---|
| DC1DTLZ1 | 3 | 1.4149 × 10(1.95 × 10)- | 1.5618 × 10(4.13 × 10)- | 1.3807 × 10(1.95 × 10)- | 2.7167 × 10(5.37 × 10)- | 1.3601 × 10(1.51 × 10) |
| 5 | 3.9846 × 10(1.65 × 10)+ | 4.2228 × 10(4.69 × 10)- | 4.0444 × 10(2.61 × 10)- | 4.3698 × 10(3.61 × 10)- | 4.0141 × 10(1.91 × 10) | |
| 10 | 8.6732 × 10(3.27 × 10)- | 9.6071 × 10(2.55 × 10)- | 8.8756 × 10(1.35 × 10)= | 7.9532 × 10(1.44 × 10)+ | 8.5734 × 10(1.12 × 10) | |
| 15 | 1.2823 × 10(1.99 × 10)= | 1.4122 × 10(5.93 × 10)- | 1.3728 × 10(9.13 × 10)- | 1.2557 × 10(7.74 × 10)+ | 1.2736 × 10(1.97 × 10) | |
| DC1DTLZ3 | 3 | 4.6098 × 10(9.37 × 10)- | 4.4586 × 10(1.17 × 10)= | 4.7993 × 10(1.13 × 10)- | 4.6526 × 10(7.32 × 10)- | 4.4474 × 10(1.04 × 10) |
| 5 | 1.4445 × 10(6.38 × 10)- | 2.2595 × 10(2.12 × 10)- | 1.4455 × 10(8.29 × 10)- | 1.4340 × 10(7.70 × 10)- | 1.4325 × 10(9.35 × 10) | |
| 10 | 5.0342 × 10(4.18 × 10)- | 5.1141 × 10(2.40 × 10)- | 4.8251 × 10(4.40 × 10)- | 3.9529 × 10(4.18 × 10)+ | 4.0617 × 10(6.62 × 10) | |
| 15 | 7.2158 × 10(5.90 × 10)- | 7.1515 × 10(3.52 × 10)- | 7.0274 × 10(4.72 × 10)- | 6.1623 × 10(6.01 × 10)= | 6.0734 × 10(1.82 × 10) | |
| DC2DTLZ1 | 3 | 1.4465 × 10(6.13 × 10)- | 2.3327 × 10(1.95 × 10)- | 6.9379 × 10(7.56 × 10)- | 2.0561 × 10(8.29 × 10)= | 2.0559 × 10(6.25 × 10) |
| 5 | 1.4000 × 10(3.94 × 10)- | 6.1657 × 10(3.61 × 10)- | 8.0926 × 10(5.34 × 10)- | 5.2707 × 10(3.66 × 10)- | 5.2706 × 10(4.76 × 10) | |
| 10 | 1.7004 × 10(2.17 × 10)- | 1.4388 × 10(8.15 × 10)- | 1.1874 × 10(2.31 × 10)- | 1.1113 × 10(1.19 × 10)- | 1.0951 × 10(3.82 × 10) | |
| 15 | 2.7788 × 10(3.77 × 10)- | 2.1802 × 10(4.29 × 10)- | 1.9029 × 10(2.61 × 10)- | 2.3111 × 10(5.32 × 10)= | 1.8368 × 10(6.14 × 10) | |
| DC2DTLZ3 | 3 | 5.6067 × 10(2.37 × 10)- | 6.3740 × 10(1.24 × 10)- | 5.3745 × 10(1.56 × 10)- | 3.7557 × 10(2.48 × 10)- | 5.4472 × 10(8.30 × 10) |
| 5 | 5.9661 × 10(4.30 × 10)- | 1.8737 × 10(1.98 × 10)- | 3.4857 × 10(2.31 × 10)- | 1.6513 × 10(1.04 × 10)= | 1.6513 × 10(1.11 × 10) | |
| 10 | 8.3041 × 10(3.53 × 10)- | 4.3599 × 10(3.26 × 10)- | 5.9260 × 10(1.94 × 10)- | 4.2079 × 10(4.12 × 10)+ | 4.2125 × 10(1.40 × 10) | |
| 15 | 1.0035 × 10(1.64 × 10)- | 6.4346 × 10(2.09 × 10)- | 8.6106 × 10(1.69 × 10)- | 6.6804 × 10(1.19 × 10)- | 6.2027 × 10(4.59 × 10) | |
| DC3DTLZ1 | 3 | 2.2305 × 10(1.61 × 10)- | 9.9253 × 10(5.08 × 10)= | 1.0108 × 10(3.19 × 10)= | 2.0631 × 10(6.73 × 10)- | 9.9561 × 10(3.22 × 10) |
| 5 | 8.8082 × 10(5.76 × 10)- | 3.3210 × 10(6.29 × 10)- | 2.5873 × 10(1.13 × 10)= | 5.9310 × 10(1.62 × 10)- | 2.2646 × 10(8.55 × 10) | |
| DC3DTLZ3 | 3 | 1.5363 × 10(4.87 × 10)- | 4.2066 × 10(1.63 × 10)= | 6.2999 × 10(2.56 × 10)- | 5.8570 × 10(1.32 × 10)- | 3.0312 × 10(1.72 × 10) |
| 5 | 9.5209 × 10(4.83 × 10)- | 1.0169 × 10(1.03 × 10)- | 3.1576 × 10(2.48 × 10)- | 2.4876 × 10(1.25 × 10)- | 8.7801 × 10(2.90 × 10) | |
| 10 | 1.6601 × 10(6.41 × 10)- | 1.8491 × 10(6.92 × 10)- | 6.3620 × 10(3.84 × 10)- | 4.9978 × 10(6.75 × 10)- | 1.2029 × 10(9.22 × 10) | |
| 15 | 3.0696 × 10(1.00 × 10)- | 6.2199 × 10(3.64 × 10)- | 7.5702 × 10(4.11 × 10)- | 7.3173 × 10(2.68 × 10)- | 1.4118 × 10(9.31 × 10) | |
| +/−/= | 1/20/1 | 0/19/3 | 0/19/3 | 4/14/4 | ||
| Problem | M | NSGA-III | C-TAEA | DCNSGA-III | MOEA/D-2WA | DP-NSGA-III |
|---|---|---|---|---|---|---|
| DC1DTLZ1 | 3 | 6.2908 × 10(1.80 × 10)+ | 6.2624 × 10(1.18 × 10)+ | 6.2456 × 10(2.30 × 10)= | 5.9725 × 10(1.81 × 10)- | 6.2544 × 10(1.51 × 10) |
| 5 | 7.7284 × 10(8.57 × 10)+ | 7.6956 × 10(8.87 × 10)- | 7.6977 × 10(7.37 × 10)- | 7.6525 × 10(1.74 × 10)- | 7.7057 × 10(1.18 × 10) | |
| 10 | 7.9618 × 10(2.24 × 10)- | 7.9609 × 10(1.14 × 10)- | 7.9345 × 10(1.66 × 10)- | 7.5413 × 10(5.97 × 10)- | 7.9681 × 10(1.11 × 10) | |
| 15 | 7.9782 × 10(7.60 × 10)- | 7.9700 × 10(5.69 × 10)- | 7.9658 × 10(2.55 × 10)- | 6.3463 × 10(2.12 × 10)- | 7.9784 × 10(2.01 × 10) | |
| DC1DTLZ3 | 3 | 4.6783 × 10(1.08 × 10)= | 4.5876 × 10(2.86 × 10)- | 4.6354 × 10(2.02 × 10)= | 4.6891 × 10(9.39 × 10)+ | 4.6701 × 10(1.88 × 10) |
| 5 | 7.6344 × 10(1.04 × 10)= | 6.8741 × 10(2.11 × 10)- | 7.6321 × 10(8.69 × 10)- | 5.6919 × 10(1.88 × 10)- | 7.6382 × 10(9.38 × 10) | |
| 10 | 8.6557 × 10(9.56 × 10)- | 9.0533 × 10(1.34 × 10)- | 8.8507 × 10(6.10 × 10)- | 9.6234 × 10(6.81 × 10)+ | 9.6086 × 10(1.77 × 10) | |
| 15 | 7.1236 × 10(2.05 × 10)- | 7.6602 × 10(2.15 × 10)- | 7.5661 × 10(1.87 × 10)- | 9.6225 × 10(1.39 × 10)- | 9.7225 × 10(1.22 × 10) | |
| DC2DTLZ1 | 3 | 5.2980 × 10(1.50 × 10)- | 8.3802 × 10(3.19 × 10)- | 7.1724 × 10(1.93 × 10)- | 8.4167 × 10(1.11 × 10)= | 8.4168 × 10(9.28 × 10) |
| 5 | 8.5826 × 10(5.50 × 10)- | 9.7691 × 10(2.39 × 10)- | 9.3819 × 10(8.13 × 10)- | 9.7987 × 10(1.24 × 10)= | 9.7989 × 10(1.22 × 10) | |
| 10 | 9.7880 × 10(7.28 × 10)- | 9.9944 × 10(2.90 × 10)- | 9.9753 × 10(7.40 × 10)= | 9.9893 × 10(4.09 × 10)= | 9.9968 × 10(1.55 × 10) | |
| 15 | 9.7478 × 10(1.01 × 10)- | 9.9978 × 10(8.11 × 10)- | 9.9493 × 10(1.60 × 10)= | 9.8577 × 10(1.44 × 10)- | 9.9992 × 10(9.13 × 10) | |
| DC2DTLZ3 | 3 | 8.1376 × 10(1.24 × 10)- | 5.4647 × 10(1.30 × 10)- | 4.8563 × 10(1.47 × 10)- | 2.1007 × 10(2.70 × 10)- | 5.5933 × 10(2.64 × 10) |
| 5 | 7.1752 × 10(3.92 × 10)- | 7.9251 × 10(2.19 × 10)- | 5.1276 × 10(3.74 × 10)- | 8.1267 × 10(3.45 × 10)= | 8.1257 × 10(4.34 × 10) | |
| 10 | 2.0234 × 10(4.70 × 10)- | 9.6831 × 10(1.11 × 10)- | 6.6125 × 10(3.78 × 10)- | 9.6980 × 10(1.76 × 10)= | 9.6981 × 10(1.25 × 10) | |
| 15 | 1.8326 × 10(1.06 × 10)- | 9.4186 × 10(3.48 × 10)- | 3.6589 × 10(4.69 × 10)- | 8.5857 × 10(3.43 × 10)= | 9.9069 × 10(1.18 × 10) | |
| DC3DTLZ1 | 3 | 9.6576 × 10(1.19 × 10)- | 5.2180 × 10(3.16 × 10)- | 5.2776 × 10(1.74 × 10)= | 5.0561 × 10(3.22 × 10)= | 5.2768 × 10(1.33 × 10) |
| 5 | 5.4568 × 10(6.35 × 10)- | 8.8297 × 10(1.19 × 10)- | 1.2713 × 10(5.84 × 10)- | 9.3507 × 10(1.42 × 10)- | 1.2965 × 10(1.61 × 10) | |
| DC3DTLZ3 | 3 | 0.0000 × 10(0.00 × 10)- | 3.3638 × 10(2.15 × 10)- | 1.2002 × 10(6.57 × 10)- | 1.2125 × 10(6.64 × 10)- | 3.5909 × 10(1.89 × 10) |
| 5 | 0.0000 × 10(0.00 × 10)- | 5.2458 × 10(2.00 × 10)- | 3.0684 × 10(2.92 × 10)- | 5.2956 × 10(5.67 × 10)= | 5.7579 × 10(3.94 × 10) | |
| 10 | 0.0000 × 10(0.00 × 10)- | 6.6668 × 10(5.64 × 10)- | 2.5906 × 10(3.73 × 10)- | 6.3365 × 10(4.59 × 10)- | 7.8243 × 10(7.14 × 10) | |
| 15 | 0.0000 × 10(0.00 × 10)- | 7.4586 × 10(2.03 × 10)- | 1.0836 × 10(2.96 × 10)- | 8.4142 × 10(4.73 × 10)- | 1.1732 × 10(1.54 × 10) | |
| +/−/= | 2/18/2 | 1/21/0 | 0/17/5 | 2/12/8 | ||
| Problem | M | NSGA-III | C-TAEA | DCNSGA-III | MOEA/D-2WA | DP-NSGA-III |
|---|---|---|---|---|---|---|
| MW4 | 3 | 4.1535 × 10(1.08 × 10)+ | 4.6663 × 10(3.46 × 10)- | 4.2120 × 10(5.01 × 10)= | 4.1993 × 10(9.15 × 10)+ | 4.2103 × 10(3.36 × 10) |
| 5 | 1.0474 × 10(2.36 × 10)+ | 1.2218 × 10(1.18 × 10)- | 1.0500 × 10(1.69 × 10)+ | 1.0430 × 10(3.57 × 10)+ | 1.0521 × 10(1.78 × 10) | |
| 10 | 2.1816 × 10(1.12 × 10)+ | 2.7641 × 10(6.24 × 10)- | 2.2047 × 10(7.34 × 10)- | 2.0360 × 10(8.93 × 10)+ | 2.1994 × 10(1.54 × 10) | |
| 15 | 3.7194 × 10(6.44 × 10)= | 4.3583 × 10(9.90 × 10)- | 3.7041 × 10(4.42 × 10)= | 2.4986 × 10(1.21 × 10)+ | 3.7182 × 10(6.68 × 10) | |
| MW8 | 3 | 6.2302 × 10(3.83 × 10)- | 5.5022 × 10(3.58 × 10)- | 4.9781 × 10(2.19 × 10)- | 5.1319 × 10(3.30 × 10)- | 4.8680 × 10(2.65 × 10) |
| 5 | 1.5959 × 10(3.49 × 10)- | 1.7035 × 10(1.87 × 10)- | 1.5266 × 10(2.67 × 10)- | 1.5301 × 10(4.01 × 10)- | 1.5216 × 10(3.66 × 10) | |
| 10 | 4.2660 × 10(5.27 × 10)- | 4.1017 × 10(3.11 × 10)- | 4.0947 × 10(4.64 × 10)- | 3.9667 × 10(2.06 × 10)+ | 3.9871 × 10(1.65 × 10) | |
| 15 | 6.4708 × 10(1.38 × 10)- | 6.4468 × 10(2.82 × 10)- | 6.4353 × 10(1.22 × 10)- | 6.0777 × 10(4.53 × 10)+ | 6.2793 × 10(2.55 × 10) | |
| MW14 | 3 | 1.3425 × 10(1.02 × 10)- | 1.1616 × 10(3.84 × 10)+ | 1.3657 × 10(2.50 × 10)- | 2.0790 × 10(5.07 × 10)- | 1.2706 × 10(3.38 × 10) |
| 5 | 3.6249 × 10(2.95 × 10)- | 3.0987 × 10(6.06 × 10)+ | 3.8139 × 10(4.39 × 10)- | 4.6584 × 10(7.65 × 10)- | 3.3364 × 10(2.80 × 10) | |
| 10 | 1.1445 × 10(2.49 × 10)- | 1.4023 × 10(5.04 × 10)- | 1.1844 × 10(2.65 × 10)- | 1.4500 × 10(2.06 × 10)- | 1.0925 × 10(2.83 × 10) | |
| 15 | 3.2374 × 10(7.09 × 10)- | 3.0938 × 10(1.41 × 10)- | 3.3312 × 10(1.33 × 10)- | 3.1616 × 10(7.02 × 10)- | 2.7544 × 10(1.58 × 10) | |
| +/−/= | 3/8/1 | 2/10/0 | 1/9/2 | 6/6/0 | ||
| Problem | M | NSGA-III | C-TAEA | DCNSGA-III | MOEA/D-2WA | DP-NSGA-III |
|---|---|---|---|---|---|---|
| MW4 | 3 | 8.4121 × 10(1.51 × 10)+ | 8.3793 × 10(3.18 × 10)- | 8.4069 × 10(4.56 × 10)= | 8.4026 × 10(2.58 × 10)= | 8.4076 × 10(2.82 × 10) |
| 5 | 9.7976 × 10(1.64 × 10)+ | 9.7721 × 10(2.88 × 10)- | 9.7969 × 10(1.07 × 10)+ | 9.7957 × 10(1.51 × 10)= | 9.7954 × 10(1.78 × 10) | |
| 10 | 9.9955 × 10(6.84 × 10)= | 9.9952 × 10(5.81 × 10)- | 9.9966 × 10(7.69 × 10)= | 9.6297 × 10(9.11 × 10)- | 9.9967 × 10(2.65 × 10) | |
| 15 | 9.9990 × 10(9.83 × 10)= | 9.9984 × 10(2.52 × 10)- | 9.9990 × 10(9.07 × 10)= | 8.2556 × 10(2.54 × 10)- | 9.9991 × 10(1.00 × 10) | |
| MW8 | 3 | 5.0730 × 10(4.92 × 10)- | 5.1953 × 10(1.50 × 10)- | 5.2886 × 10(9.19 × 10)- | 5.3090 × 10(1.40 × 10)= | 5.3278 × 10(1.18 × 10) |
| 5 | 8.0433 × 10(2.12 × 10)= | 7.8742 × 10(5.44 × 10)- | 8.1027 × 10(2.94 × 10)+ | 8.0856 × 10(4.10 × 10)= | 8.1020 × 10(2.88 × 10) | |
| 10 | 9.5443 × 10(2.29 × 10)= | 9.6348 × 10(2.09 × 10)- | 9.6277 × 10(1.94 × 10)- | 9.6889 × 10(1.33 × 10)+ | 9.6775 × 10(6.76 × 10) | |
| 15 | 9.7484 × 10(1.10 × 10)- | 9.4017 × 10(4.48 × 10)- | 9.7489 × 10(9.28 × 10)- | 9.8542 × 10(1.19 × 10)- | 9.9014 × 10(2.21 × 10) | |
| MW14 | 3 | 4.5894 × 10(6.58 × 10)- | 4.6358 × 10(2.95 × 10)- | 4.5976 × 10(1.11 × 10)- | 4.3775 × 10(3.53 × 10)- | 4.6539 × 10(2.91 × 10) |
| 5 | 3.4702 × 10(1.53 × 10)- | 3.9414 × 10(3.36 × 10)+ | 3.6253 × 10(1.99 × 10)- | 3.2687 × 10(2.63 × 10)- | 3.8548 × 10(7.65 × 10) | |
| 10 | 2.0239 × 10(4.52 × 10)- | 2.2912 × 10(4.66 × 10)+ | 2.0483 × 10(3.25 × 10)- | 1.5608 × 10(2.01 × 10)- | 2.0902 × 10(5.06 × 10) | |
| 15 | 1.5134 × 10(2.58 × 10)- | 1.5365 × 10(3.57 × 10)- | 1.5918 × 10(1.04 × 10)- | 7.7070 × 10(1.17 × 10)- | 1.6459 × 10(3.82 × 10) | |
| +/−/= | 2/6/4 | 2/10/0 | 2/7/3 | 1/7/4 | ||
References
- Mala-Jetmarova, H.; Sultanova, N.; Savic, D. Lost in optimisation of water distribution systems? A literature review of system operation. Environ. Model. Softw. 2017, 93, 209–254. [Google Scholar] [CrossRef] [Green Version]
- Dong, W.; Zhou, K.; Qi, H.; He, C.; Zhang, J. A tissue P system based evolutionary algorithm for multi-objective VRPTW. Swarm Evol. Comput. 2018, 39, 310–322. [Google Scholar] [CrossRef]
- Pan, J.S.; Liu, N.; Chu, S.C. A competitive mechanism based multi-objective differential evolution algorithm and its application in feature selection. Knowl.-Based Syst. 2022, 245, 108582. [Google Scholar] [CrossRef]
- Geng, H.; Xu, K.; Zhang, Y.; Zhou, Z. A classification tree and decomposition based multi-objective evolutionary algorithm with adaptive operator selection. Complex Intell. Syst. 2022, 1–18. [Google Scholar] [CrossRef]
- Wang, F.; Li, Y.; Zhang, H.; Hu, T.; Shen, X.L. An adaptive weight vector guided evolutionary algorithm for preference-based multi-objective optimization. Swarm Evol. Comput. 2019, 49, 220–233. [Google Scholar] [CrossRef]
- Fan, Z.; Li, W.; Cai, X.; Li, H.; Wei, C.; Zhang, Q.; Deb, K.; Goodman, E. Push and pull search for solving constrained multi-objective optimization problems. Swarm Evol. Comput. 2019, 44, 665–679. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.Z.; Wang, Y. Handling constrained multiobjective optimization problems with constraints in both the decision and objective spaces. IEEE Trans. Evol. Comput. 2019, 23, 870–884. [Google Scholar] [CrossRef]
- Ming, M.; Trivedi, A.; Wang, R.; Srinivasan, D.; Zhang, T. A dual-population-based evolutionary algorithm for constrained multiobjective optimization. IEEE Trans. Evol. Comput. 2021, 25, 739–753. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhu, M.; Wang, J.; Zhang, Z.; Xiang, Y.; Zhang, J. Tri-goal evolution framework for constrained many-objective optimization. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3086–3099. [Google Scholar] [CrossRef]
- Li, K.; Chen, R.; Fu, G.; Yao, X. Two-archive evolutionary algorithm for constrained multiobjective optimization. IEEE Trans. Evol. Comput. 2018, 23, 303–315. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Liang, G.; Zhang, J. Cooperative differential evolution framework for constrained multiobjective optimization. IEEE Trans. Cybern. 2018, 49, 2060–2072. [Google Scholar] [CrossRef] [PubMed]
- Panichella, A. An adaptive evolutionary algorithm based on non-Euclidean geometry for many-objective optimization. In Proceedings of the Genetic and Evolutionary Computation Conference, Prague, Czech Republic, 13–17 July 2019; pp. 595–603. [Google Scholar]
- Woldesenbet, Y.G.; Yen, G.G.; Tessema, B.G. Constraint handling in multiobjective evolutionary optimization. IEEE Trans. Evol. Comput. 2009, 13, 514–525. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Jan, M.A.; Khanum, R.A. A study of two penalty-parameterless constraint handling techniques in the framework of MOEA/D. Appl. Soft Comput. 2013, 13, 128–148. [Google Scholar] [CrossRef]
- Takahama, T.; Sakai, S. Efficient constrained optimization by the ε constrained adaptive differential evolution. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–8. [Google Scholar]
- Wang, Y.; Cai, Z. Combining multiobjective optimization with differential evolution to solve constrained optimization problems. IEEE Trans. Evol. Comput. 2012, 16, 117–134. [Google Scholar] [CrossRef]
- Tasgetiren, M.F.; Suganthan, P.N.; Pan, Q.K.; Mallipeddi, R.; Sarman, S. An ensemble of differential evolution algorithms for constrained function optimization. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–8. [Google Scholar]
- Jain, H.; Deb, K. An evolutionary many-objective optimization algorithm using reference-point based nondominated sorting approach, part II: Handling constraints and extending to an adaptive approach. IEEE Trans. Evol. Comput. 2013, 18, 602–622. [Google Scholar] [CrossRef]
- Fan, Z.; Fang, Y.; Li, W.; Cai, X.; Wei, C.; Goodman, E. MOEA/D with angle-based constrained dominance principle for constrained multi-objective optimization problems. Appl. Soft Comput. 2019, 74, 621–633. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Zhang, Y.; Su, Y.; Zhang, X.; Tan, K.C.; Jin, Y. Balancing objective optimization and constraint satisfaction in constrained evolutionary multiobjective optimization. IEEE Trans. Cybern. 2021, 52, 9559–9572. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, R.B. Simulated binary crossover for continuous search space. Complex Syst. 1995, 9, 115–148. [Google Scholar]
- Deb, K.; Goyal, M. A combined genetic adaptive search (GeneAS) for engineering design. Comput. Sci. Inform. 1996, 26, 30–45. [Google Scholar]
- Alefeld, G. On the convergence of Halley’s Method. Am. Math. Mon. 1981, 88, 530–536. [Google Scholar] [CrossRef]
- Zhang, X.; Tian, Y.; Cheng, R.; Jin, Y. An efficient approach to nondominated sorting for evolutionary multiobjective optimization. IEEE Trans. Evol. Comput. 2014, 19, 201–213. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Wang, Y. Evolutionary constrained multiobjective optimization: Test suite construction and performance comparisons. IEEE Trans. Evol. Comput. 2019, 23, 972–986. [Google Scholar] [CrossRef]
- Bosman, P.A.; Thierens, D. The balance between proximity and diversity in multiobjective evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef] [Green Version]
- Jiao, R.; Zeng, S.; Li, C.; Yang, S.; Ong, Y.S. Handling constrained many-objective optimization problems via problem transformation. IEEE Trans. Cybern. 2020, 51, 4834–4847. [Google Scholar] [CrossRef] [PubMed]
- Jiao, R.; Zeng, S.; Li, C.; Ong, Y.S. Two-type weight adjustments in MOEA/D for highly constrained many-objective optimization. Inf. Sci. 2021, 578, 592–614. [Google Scholar] [CrossRef]
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB platform for evolutionary multi-objective optimization [educational forum]. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef]












| Objectives/Dimension No. M | Reference No. | Popsize N |
|---|---|---|
| 3 | 91 | 92 |
| 5 | 210 | 212 |
| 10 | 275 | 276 |
| 15 | 135 | 136 |
| Problem | ||||
|---|---|---|---|---|
| C1DTLZ1 | 46,000 | 127,200 | 276,000 | 204,000 |
| C1DTLZ3 | 92,000 | 318,000 | 966,000 | 680,000 |
| C2DTLZ2 | 23,000 | 74,200 | 207,000 | 136,000 |
| C3DTLZ4 | 69,000 | 265,000 | 828,000 | 544,000 |
| DC1DTLZ1 | 69,000 | 265,000 | 828,000 | 544,000 |
| DC1DTLZ3 | 69,000 | 265,000 | 828,000 | 544,000 |
| DC2DTLZ1 | 138,000 | 530,000 | 1656,000 | 1088,000 |
| DC2DTLZ3 | 138,000 | 530,000 | 1656,000 | 1088,000 |
| DC3DTLZ1 | 69,000 | 265,000 | 828,000 | 544,000 |
| DC3DTLZ3 | 69,000 | 265,000 | 828,000 | 544,000 |
| MW4 | 55,200 | 127,200 | 165,600 | 81,600 |
| MW8 | 55,200 | 127,200 | 165,600 | 81,600 |
| MW14 | 55,200 | 127,200 | 165,600 | 81,600 |
| IGD (−/+/=) | HV (−/+/=) | |
|---|---|---|
| DP-NSGA-III vs. NSGA-III | 2/13/1 | 4/11/1 |
| DP-NSGA-III vs. C-TAEA | 2/13/1 | 3/11/2 |
| DP-NSGA-III vs. DCNSGA-III | 0/14/2 | 2/12/2 |
| DP-NSGA-III vs. MOEA/D-2WA | 6/7/3 | 6/8/2 |
| IGD (−/+/=) | HV (−/+/=) | |
|---|---|---|
| DP-NSGA-III vs. NSGA-III | 1/20/1 | 2/18/2 |
| DP-NSGA-III vs. C-TAEA | 0/19/3 | 1/21/0 |
| DP-NSGA-III vs. DCNSGA-III | 0/19/3 | 0/17/5 |
| DP-NSGA-III vs. MOEA/D-2WA | 4/14/4 | 2/12/8 |
| IGD (−/+/=) | HV (−/+/=) | |
|---|---|---|
| DP-NSGA-III vs. NSGA-III | 3/8/1 | 2/6/4 |
| DP-NSGA-III vs. C-TAEA | 2/10/0 | 2/10/0 |
| DP-NSGA-III vs. DCNSGA-III | 1/9/2 | 2/7/3 |
| DP-NSGA-III vs. MOEA/D-2WA | 6/6/0 | 1/7/4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, H.; Zhou, Z.; Shen, J.; Song, F. A Dual-Population-Based NSGA-III for Constrained Many-Objective Optimization. Entropy 2023, 25, 13. https://doi.org/10.3390/e25010013
Geng H, Zhou Z, Shen J, Song F. A Dual-Population-Based NSGA-III for Constrained Many-Objective Optimization. Entropy. 2023; 25(1):13. https://doi.org/10.3390/e25010013
Chicago/Turabian StyleGeng, Huantong, Zhengli Zhou, Junye Shen, and Feifei Song. 2023. "A Dual-Population-Based NSGA-III for Constrained Many-Objective Optimization" Entropy 25, no. 1: 13. https://doi.org/10.3390/e25010013
APA StyleGeng, H., Zhou, Z., Shen, J., & Song, F. (2023). A Dual-Population-Based NSGA-III for Constrained Many-Objective Optimization. Entropy, 25(1), 13. https://doi.org/10.3390/e25010013