1. Introduction
Recently, digitalization and artificial intelligence have been actively introduced into many spheres of life, and neural networks, due to the unique structure, and high efficiency of information processing, have become the main tool for their implementation. Basic neural network models, such as cellular neural networks [
1], bidirectional associative memory neural networks [
2], Hopfield neural networks [
3] and shunting inhibitory cellular neural networks [
4] are described using first-order differential equations. However, it was found that these mentioned neural networks cannot effectively model the mechanism of squid semicircular canal and synapse [
5]. To solve such an actual problem, Babcock and Westervelt [
6,
7] introduced neural networks, known today as an inertial neural networks (INNs). The standard mathematical model of the INNs can be described by the second-order derivative and differs from the Hopfield neural networks by the inertial term. The inclusion of inertia in the neural network model opened up new directions in the field biology, engineering technology and information system [
8,
9].
The original inertial neural networks was considered in [
10],
where
, the second derivative of
, is called an inertial term of system (
1);
is the state variable of the
i th neuron at time
t;
is the damping coefficient;
is the rate with which the neurons self-regulate or reset their potential when isolated from other networks and inputs; the constant
is the synaptic connection weight of the neuron
j on the neuron
i;
is the activation function of incoming potentials of the neuron
j at time
t; and
is the external input of network to the
ith neuron.
In recent years, by using the reduced-order transformation, numerous papers have been written on the stability and synchronization of the following delayed INNs and its generalizations [
11,
12,
13],
where time delay
is constant,
is the synaptic connection weight of the neuron
j on the neuron
i with delay, and the external input
for all
is continuous functions.
In [
14], the inertial neural network (
1) was modified by adding mixed delays,
where
,
and
are the synaptic connection weights, which are related to the neurons without delays, with discrete delay and distributive delay, separately.
is the discrete delay; meanwhile,
is the distributed delay, which satisfies
,
, where
and
k are constants. The external input
for all
is continuous functions.
The latest results are related to consideration of time-varying velocities, weights of connections and external inputs as continuous periodic, almost periodic functions depending on a time variable. These results have been effectively applied to numerous fields, such as the stabilization of periodic and almost anti-periodic motions, and control, as well as synchronization [
15,
16,
17,
18,
19,
20].
In recent years, scientists have begun to study the distribution of recurrent and chaotic signals in the network, taking Poisson stable [
21,
22,
23,
24,
25] and unpredictable functions [
26] as external inputs. We note that the Poisson stable functions are a complex and general case of the class of recurrent functions known to us as almost periodic, quasi-periodic and periodic functions [
27]. The concept of the unpredictability was introduced in 2016 [
26]. Trajectories of the dynamics are of Poincaré chaos, and this provides strong argument for the research, considering the theoretical and application merits of chaos. Unpredictable functions differ from the Poisson stable functions by the separation property [
27,
28]. Thus, unpredictable motions make a subclass of Poisson stable ones, but as the studies demonstrate, all examples of concrete Poisson stable functions are unpredictable. That is, the unpredictability may be a more constructive phenomenon than Poisson stability [
27,
28]. Nevertheless, to provide complete information of the results, we prove two main assertions on both unpredictable and Poisson stable motions in the neural networks. Poisson stability is proved by
the method of included intervals, which was introduced and developed in [
27,
28,
29]. Note that, currently, this method remains the main way to prove convergence, due to its efficiency in theory differential equations.
For the first time, unpredictable motions were investigated for inertial neural networks in [
29], that is, unpredictable functions were used as input data in system (
1). The article considers the case when the reduced-order transformation formula includes all parameters, unlike the articles [
10,
14,
15,
18,
19]. For example, if in the article [
19] strict restrictions are imposed on the coefficients in the main transformation formula, then in [
29], for a broader study, the positive coefficients are considered. The presence of such coefficients in the transformation [
29] give advantages in a detailed study of the behavior of the solution.
The present and potential contributions as well as the novelties of the paper can be highlighted as follows:
In this article, the existence, uniqueness and exponential stability of discontinuous Poisson stable and unpredictable motions of inertial neural networks with a generalized piecewise constant argument are studied.
It is the first time in the literature that an inertial neural network with a generalized piecewise constant argument, combining delayed and advanced arguments, is investigated.
The generalized piecewise constant argument function in the neural network model is given in the form of a discontinuous stable Poisson function, which, in turn, is also a novelty of the work. The function is described by special sequences that are connected by a newly introduced relation, that is, a Poisson triple of sequences.
Poisson stability of discontinuous functions is studied on the basis of the B-topology and by the method of included intervals.
In the future, the included intervals method based on B-topology can be used for neural networks with both impulsive and discontinuous functional dependence on time.
2. Preliminaries
Our goal is to find unpredictable and Poisson stable motions of inertial neural network with a generalized piecewise constant argument. The presence of a piecewise constant argument requires the study of unpredictable and Poisson stable oscillations on each continuous interval. That is, we need to enter an unpredictable function and a piecewise constant argument function. For that, in this part of the paper, we introduce special time sequences and describe the generalized piecewise constant argument.
Denote by and the sets of natural and real numbers, and integers, respectively. Let be the Euclidean norm in .
Let us commence with preliminary concepts and give the basic definitions of the Poisson stable sequence and function, and the unpredictable function.
Definition 1 ([
22]).
A sequence , in is called Poisson stable, provided that it is bounded and there exists a sequence , , of positive integers such that as on bounded intervals of integers. Definition 2 ([
27]).
A uniformly continuous and bounded function is unpredictable if there exist positive numbers and sequences both of which diverge to infinity such that as uniformly on compact subsets of and for each and . Definition 3 ([
22]).
A continuous and bounded function is said to be Poisson stable if there exists a sequence as such that uniformly on compact subsets of .
The sequence in the last definitions is called the Poisson or convergence sequence and the divergence estimated by is said to be the separation property.
In this paper, the main subject for investigation is inertial neural networks with piecewise constant argument. The differential equations with piecewise constant arguments, like any model of the theory of differential equations, arose due to the need to apply them in real life. They are important mathematical models that are used in the study of biological, biomedical processes, control theory, stabilization and neural networks [
30,
31,
32]. For example, in control theory, the following process can be investigated using differential equations with a piecewise constant argument: a state and control constraints, a plant under control, as well as the performance index to be minimized are defined in continuous time, while the manipulated variables are permitted to change at fixed and uniformly distributed sampling times [
33].
In general, differential equations with a piecewise constant argument have the form,
where
is a generalized piecewise constant argument function. It should be noted that although the function
is discontinuous, the solution of the differential equation will be continuous functions. A full description of this discontinuous function
can be found in the book [
33].
The system that we will consider has the following form:
where
is a generalized piecewise constant argument function. Similar to coefficients
of system (
1), the constant
is the synaptic connection weight of the neuron
j on the neuron
and
is the activation function of incoming potentials of the neuron
j at time
t, respectively. Moreover, inputs
in system (
4) are unpredictable functions.
In what follows, we assume that the activations are continuous functions, and the parameters and are real numbers.
2.1. Poisson Sequences
Fix the sequences of real numbers which are strictly increasing with respect to the index. Sequences are unbounded in both directions. In what follows, we call them Poisson sequences.
We provide the description of the Poisson couple and Poisson triple in the following definitions.
Definition 4. A couple of Poisson sequences , , is called a Poisson couple if there exists a sequence , of integers, satisfying , as such thatuniformly on each bounded interval of integers k. Definition 5. A triple of the sequences , , is called Poisson triple, if there exists a sequence , of integers, satisfying as such that the condition (5) is fulfilled, anduniformly on each bounded interval of integers k. By comparing the Definitions 4 and 5, one can formulate the following definition, which is equivalent to Definition 5:
Definition 6. A triple of the sequences , , is called a Poisson triple, if the couples , are separately Poisson couples with the common convergence sequence .
Definition 7 ([
34]).
A sequence , , is said to be with the property if there exist positive real number w and integer p, which satisfy for all . Next, we will consider important properties of sequences that will be used in the study of further theoretical and illustrating the results.
Lemma 1. Assume that the couple of the sequences , , satisfies the following conditions:
- (i)
, where , ;
- (ii)
the sequence admits the property.
Then is a Poisson couple.
Proof. Since
property is true,
for each
. Taking
for
, we obtain that
. Now, one can easily check that the sequence
consists of zeros. Thus, the condition (
5) is satisfied on each bounded interval of integers
k. □
Lemma 2. Assume that the triple of the sequences , consists of the Poisson couple such that
- (i)
, where , ,
- (ii)
the sequence admits the property,
and the sequence , satisfying the following conditions:
- (iii)
the sequence is periodic.
- (iv)
for all it is true that .
Then is a Poisson triple.
Proof. According to Lemma 1,
is a Poisson couple. So, it remains to check the validity of
as
uniformly on each bounded interval of integers
k. By using the periodicity property,
and for all
k, one can see that the sequence
consists of zeros. That is, (
6) is valid on each bounded interval of integers
k. □
As an example of a Poisson triple, one can consider , where and , . One can verify that the sequence satisfies periodic property and , where . That is, the triple satisfies the conditions of Lemma 2.
2.2. Description of the Generalized Piecewise Constant Argument
Let us determine the argument function in (
4). In this paper, it is assumed that
if
,
, and the function is defined on the whole real line with two Poisson sequences
such that
for some positive numbers
,
and all integers
Additionally to the sequences , we fix a sequence , such that , is a Poisson triple in the sense of Definition 5. Consider the function for a fixed . It is possible to show that if , where , .
Next, we shall show that the discontinuous argument function admits properties, which are analogues of the Poisson stability.
Fix a bounded interval
with
, and an arbitrary positive number
such that
on this interval. We assume without loss of generality that
and consider discontinuity moments
,
of the interval
such that
We show that for sufficiently large
n, it is true that
for all
and
for each
, except those between
and
for each
k.
Let us fix
k,
and for fixed
k, we have that
, for
and
,
. Thus, for sufficiently large
n, the interval
is non-empty. According to (
5), condition (
7) is valid. Moreover, from condition (
6), it is implied that for sufficiently large
for
. Thus, inequalities (
7) and (
8) are approved.
If conditions (
7) and (
8) are valid for arbitrary
, then the piecewise constant function
converges to the function
on the bounded interval in
B-topology [
34]. That is,
is a
discontinuous Poisson stable function.
It should be noted that in this article, all the coefficients in (
4) are constant. If one wants to consider the coefficients
variable, they would be periodic or even unpredictable. That is, we need a special
kappa property [
35], which establishes a correspondence between periodicity and the unpredictability. The existence of such factors should be due to the higher possibility of the selection of the triple
, when they satisfy
property [
34], and in addition, the kappa property must be fulfilled [
35,
36,
37,
38]. In this paper, we utilize a stronger state when this triple is a Poisson triple, which is more comfortable in applications. This is why, in order not to weaken circumstances, we agree that the coefficients are constants.
Throughout the article, the components of the generalized piecewise constant argument
in the system (
4) are connected by the Poisson triple
, and they are understood as mentioned in this subsection.
2.3. Reduced System
As mentioned in the introduction, we use the following transformation formula [
29]:
and correspondingly, rewrite the neural network system (
4) as
If we take into account the contents of articles [
10,
14,
15,
18,
19], the variable transformation formula considers the case when
The presence of the two parameters
makes the results more general.
2.4. A Space of Functions
Introduce the set of -dimensional vector-functions with the norm It is assumed that the functions of satisfy the following properties:
- (A1)
They are Poisson stable functions with the common sequence of convergence .
- (A2)
There exists a number such that for all functions.
The following assumptions on the system (
4) are required:
- (C1)
and for all where are positive constants for ;
- (C2)
, and , where , are positive numbers for all , ;
- (C3)
, ;
- (C4)
, for each ;
- (C5)
, ;
- (C6)
, .
3. Main Results
This section of the manuscript concerns the existence and stability of the dynamics, which is discussed in
Preliminaries, that is, Poisson and unpredictable oscillations of INNs (
4). The investigation is fulfilled by considering dynamics of the specific operator
in the space
We prove the existence of Poisson stable dynamics in neural networks based on the invariance and completeness of the operator in the set. Further, the existence and exponential stability of the unpredictable solutions are confirmed.
Lemma 3. A couple , and is a bounded solution of Equation (4) if and only if it is a solution of the following integral equation:with . Define in
the operator
such that
, where
Proof. We have for
and fixed
that
From the last inequality and conditions (C4) and (C5), we obtain . So, the property (A2) is valid for .
We continue the proof and show that
satisfies condition (A1) using the method of included intervals [
27,
28,
29]. We need to verify that there exists a sequence
, satisfying
, as
such that for each
uniformly on each closed and bounded interval of
. Fix an arbitrary number
and an interval
with
, where
. It is enough to show that
for sufficiently large
n and
One can find numbers
and
in order to fulfill the following inequalities:
It is true for sufficiently large number
n that
and
on
. Hence, for
, writing
If we divide the last integral into two parts, we obtain
In the last inequality, we need to evaluate the integral. To do this, let us divide the integral over small intervals as follows. For a fixed , we assume without loss of generality that and . That is, there exist exactly p discontinuity points in
Let the following inequalities
and
be satisfied for the given
. Let us denote
Consider the last integral as follows:
Denote
and
where
, and
By the condition (
8) for
,
, we have that
,
Thus, we get that
In accordance with the uniform continuity of
, for large
n and
, one can define a
such that
if
From this, we deduce that
Moreover, we obtain that
by virtue of the condition (
7). Similarly to
one can evaluate following integral:
In this way,
can be obtained. Consequently, it is true that
for
in conformity with the inequalities (
14)–(
19). This shows that (A2) holds for
. Thus, the operator
is invariant in
. □
Lemma 5. The operator Π from to is contractive.
Proof. For
and
and
, one can find that
So, the inequality holds for .
Consequently, conditions (C3) and (C6) imply that the operator is contractive. The lemma is proved. □
For convenience, we adopt the following notations:
The following conditions are to be assumed:
- (C7)
;
- (C8)
, where .
Theorem 1. If functions , , in system (4), are Poisson stable with the convergence sequence , then under conditions (C1)–(C8), system (4) has a unique exponentially stable Poisson stable solution. Proof. First, we show the completeness of the space
. Let us denote a Cauchy sequence in the space
by
where the limit of
, on
as
is
. One can say that
is a bounded function, which means that (A2) is achieved for
. Let us show that (A1) is satisfied for
as well. Consider a closed, bounded interval
We obtain
For small enough
and
each difference in absolute value on the right side of last the inequality can be made smaller than
, and then we have
on
This implies that the sequence
uniformly on
I, which approves that the space
is complete. Note that the operator
is invariant and contractive in
, on the ground of Lemmas 4 and 5, respectively. It follows from the Banach theorem that the operator
has only one fixed point
. That is, we concluded that the system (
4) has a unique solution. So, the uniqueness of the solution is shown.
Next, consider the stability of
. Further, for convenience, write the system (
11) in vector form, using the
-dimensional function
,
where
is a diagonal matrix,
is a vector function such that
The exponential stability will be proved once we prove the lemma below.
Lemma 6. Suppose that conditions (C1) and (C8) hold, and is a continuous and bounded function with If is a solution ofwhere is a diagonal matrix, is a vector function such thatand then the following inequalityis true for , with K, which is defined as in (C8). Proof. Let t belong to the interval , for some fixed k, and consider two alternative cases (a) , (b) .
(a) For
, we have
According to the Gronwall–Bellman lemma, we obtain
Moreover, for
we have
Deduce from the condition (C8) that
, for
. It follows that (
22) holds for all
,
. If one considers another case,
; in a similar way, we will obtain the same result. Thus, (
22) is satisfied for all
. □
Let
where
denotes any other solution of the system (
4). We will check that
is a solution of (
21).
Hence, the inequality
is valid. By using the inequality (
22) to (
23), we have that
By the Gronwall–Bellman lemma, the following inequality can be obtained:
It follows from the condition (C7), that Poisson stable solution
of (
4) is exponentially stable. The theorem is proved.
Next, we shall need the following condition:
- (C9)
The functions
,
, in system (
4) belong to
, and there exist positive numbers
and sequence
which diverge to infinity such that
for each
and
.
The unpredictability of the solution for the system (
4) is established by the next theorem.
Theorem 2. Under conditions (C1)–(C9), system (4) has a unique exponentially stable unpredictable solution. According to Theorem 1, system (
4) has a unique exponentially stable Poisson stable solution
. Therefore, to show that system (
4) has a unique exponentially stable unpredictable solution, it remains to prove that
admits the unpredictability property.
So, we will show the existence of a sequence
, satisfying
, as
, and numbers
so that
for each
and
Positive numbers
and
are chosen to satisfy
and
Let the numbers and be fixed.
We will use the symbol to denote and examine the cases:
If
is valid, then
for
For the case
, in accordance with (
27), we have that
for
Applying (
25)–(
27) and due to the condition (C9), one can find that
for
,
.
For a fixed
we can choose
to be small enough so that
for certain
The function
is uniformly continuous since it belongs to
. We can conclude that for sufficiently large
n and
, there exists number
such that
if
Finally, we have by inequalities (
25)–(
27) that
for
,
. Thus, we obtain that
for
,
. Moreover,
Thus, is an unpredictable solution with sequences and .
4. An Example and Numerical Simulations
Consider the following inertial neural network with generalized piecewise constant argument given by
where the damping coefficients and the rates of the neurons activity are given as follows:
. As activations, we consider the following functions
,
, and the synaptic connection weights are given by
and the external input
As the function
, we use an unpredictable function,
where
is piecewise constant function, which is defined by
for
with an unpredictable solution
, of logistic map considered in the paper [
26]. The function
is bounded on
such that
In the paper [
26], it was proved that the function
is unpredictable.
The constant argument function is defined by the sequences , , , which constitute the Poisson triple (see example, Preliminaries).
We checked that the conditions (C1)–(C9) are true for the system (
30) with
,
,
for
, and moreover,
. If we take
, then (
30) satisfies all conditions of Theorem 2.
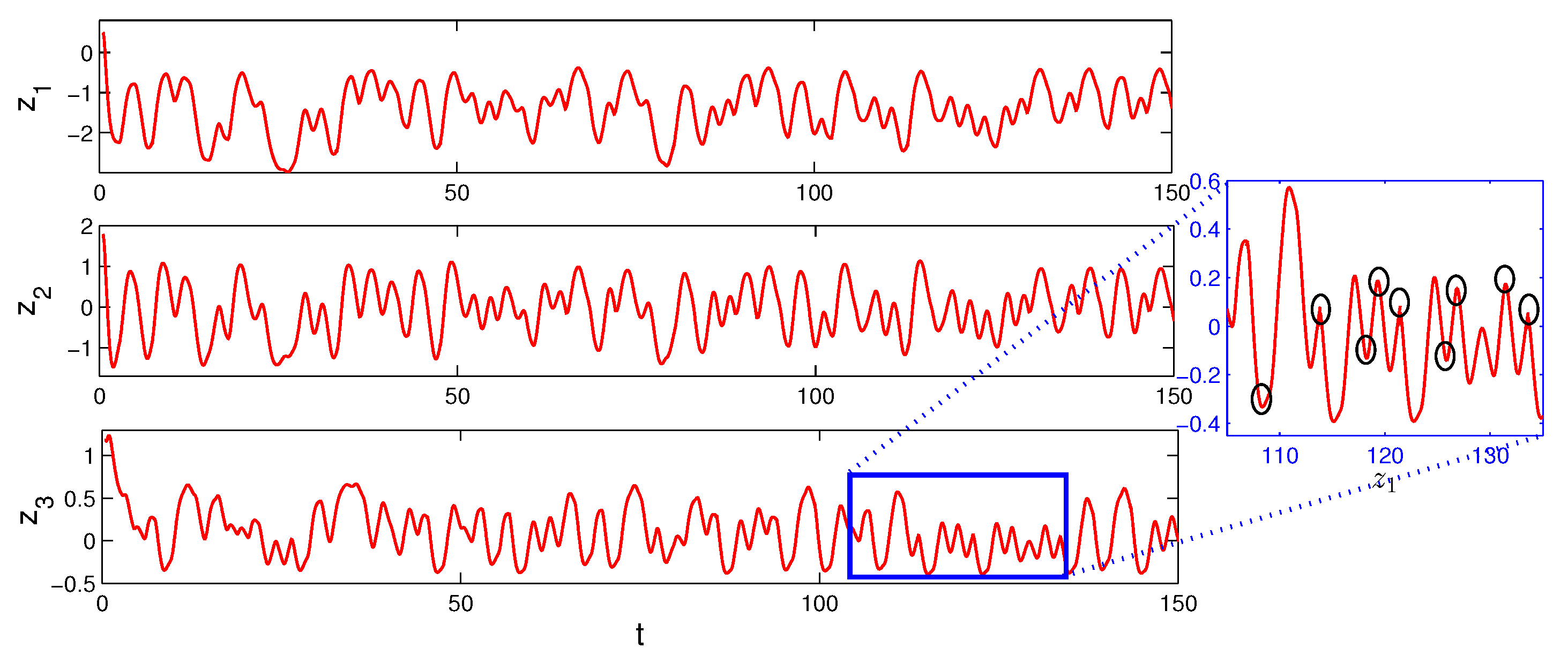
Since we will not be able to build the unpredictable function itself, we will not be able to accurately determine the initial value. Then, to show the behavior of an unpredictable solution , according to the stability, one can consider another solution , which exponentially approaches this solution and starts at the initial point .
As can be seen in
Figure 1, the solution of the system (
30) is a continuous function. However, due to the constant argument in the model, a function with discontinuous derivatives of the first order is obtained, and we have continuously differentiable motion on the intervals
. That is, we have the non-smoothness at the switching points
. Next, let us observe the influence of the length of constancy in the delay function for the output dynamics. Namely, we additionally construct the function
in the intervals
and
. The result of the simulations is seen in
Figure 2 and
Figure 3, where the intensity of the non-smoothness is increased, if one compares with
Figure 1, where the length of the constancy is equal to 1.
Figure 4 demonstrates the chaotic nature of the unpredictability. Furthermore, this picture confirms the existence of an attractor.






{kind=link}
{kind=link}
{kind=link}
{kind=link}



