
Optimal Shortcuts to Adiabatic Control by Lagrange Mechanics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
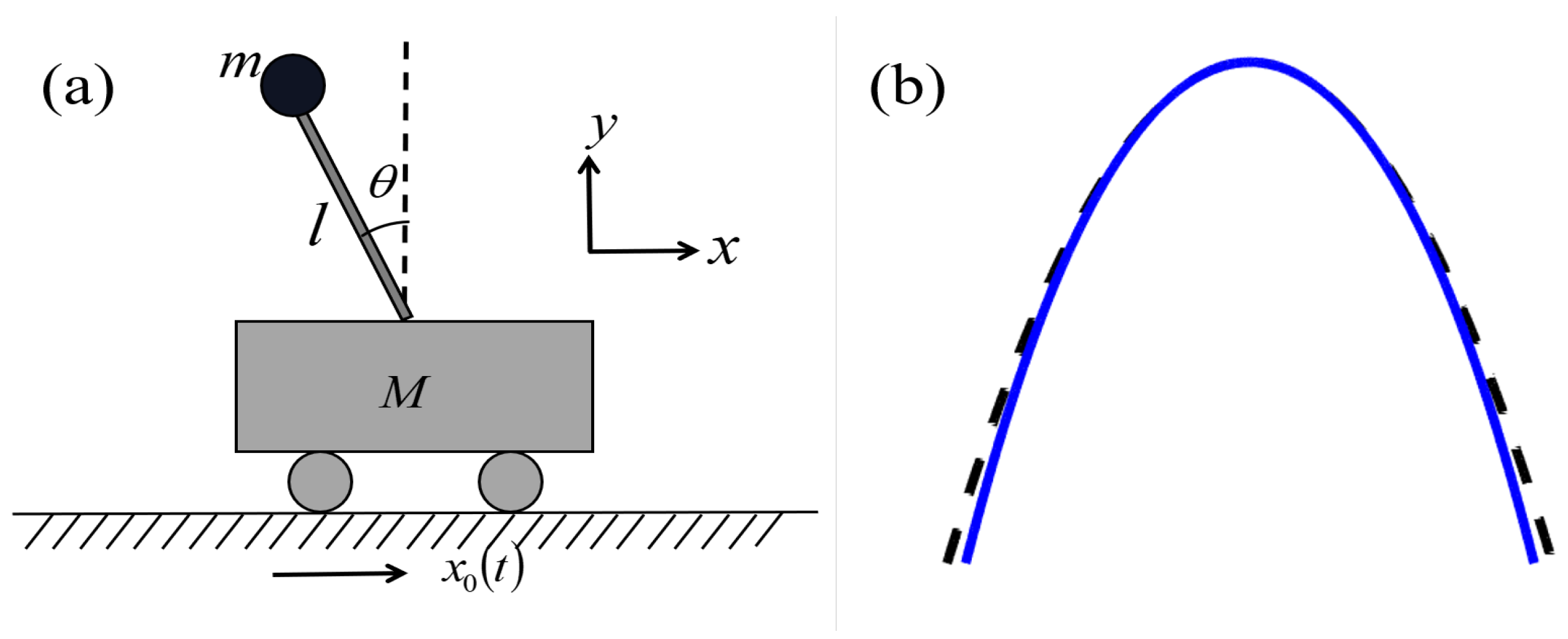
2. Physical Model
3. Hamiltonian of the System and Inverse Engineering
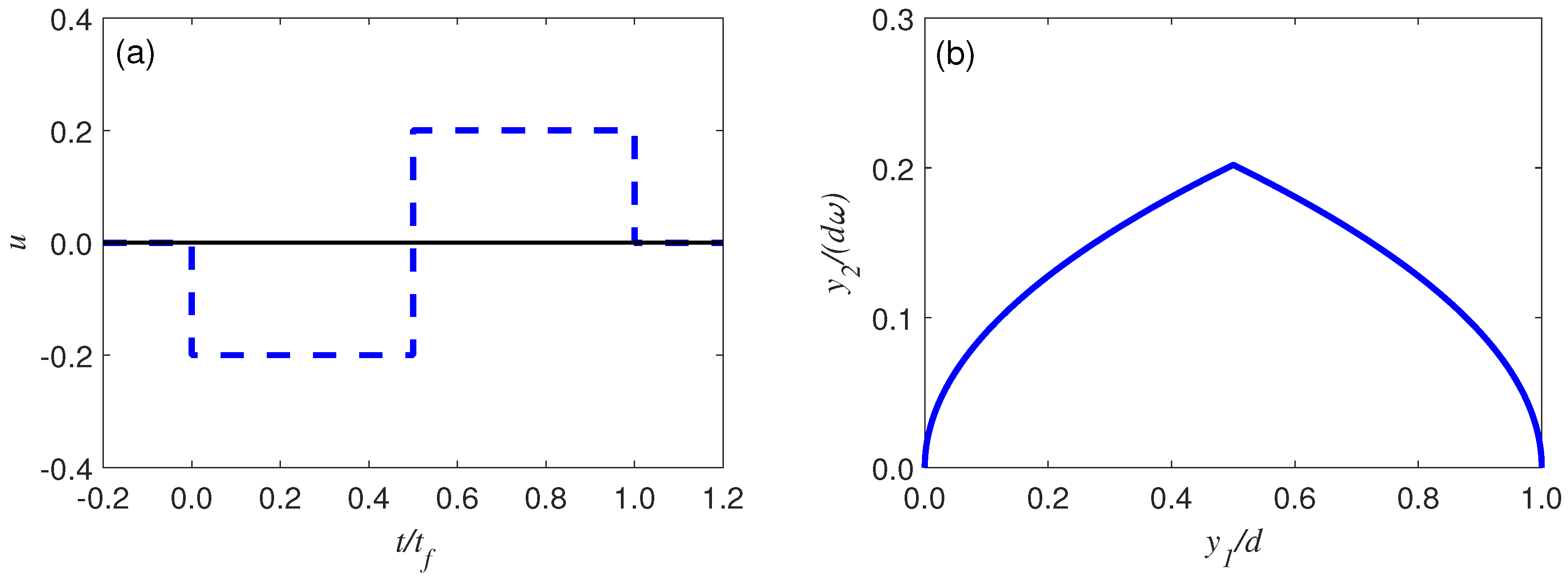
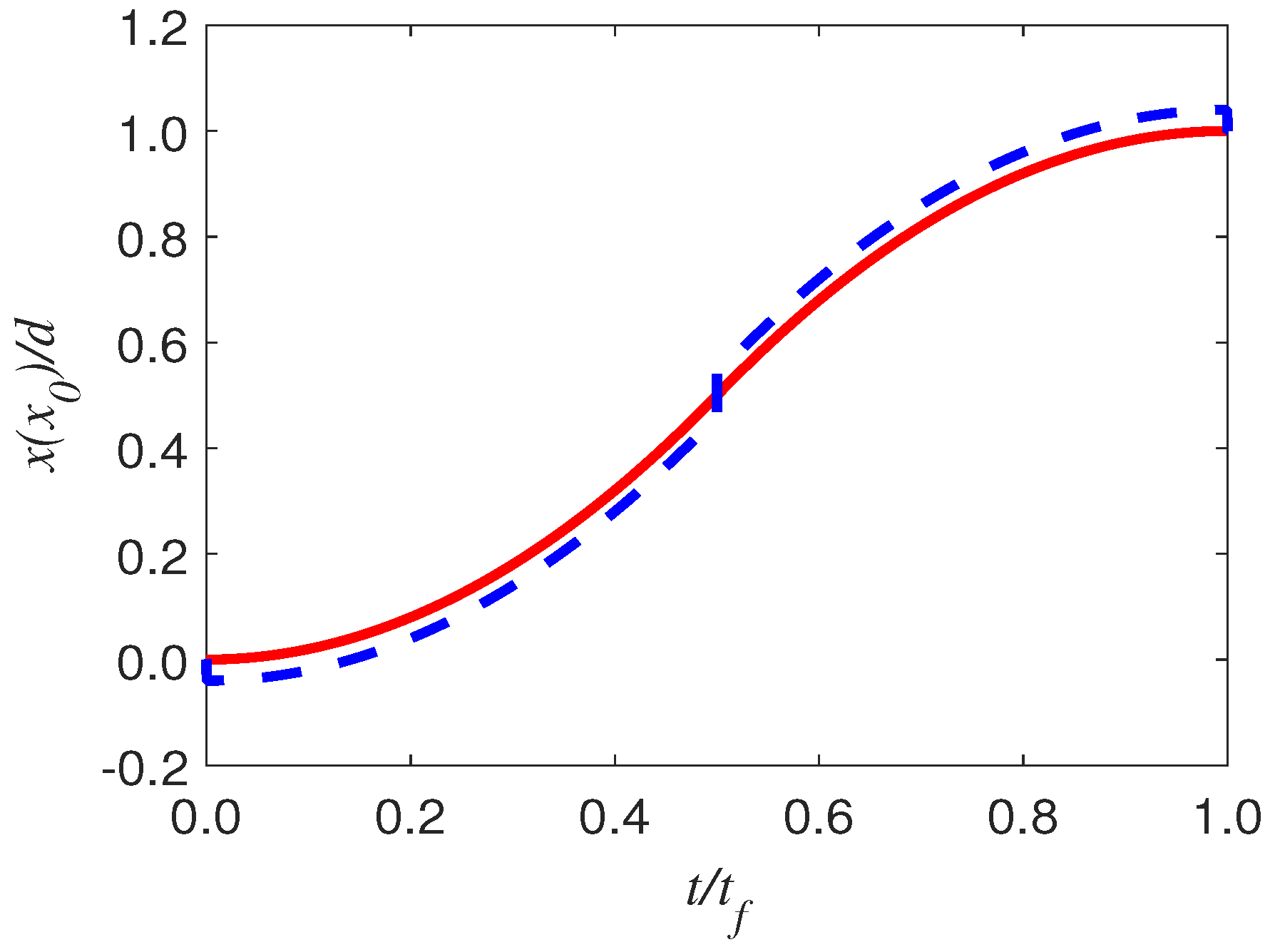
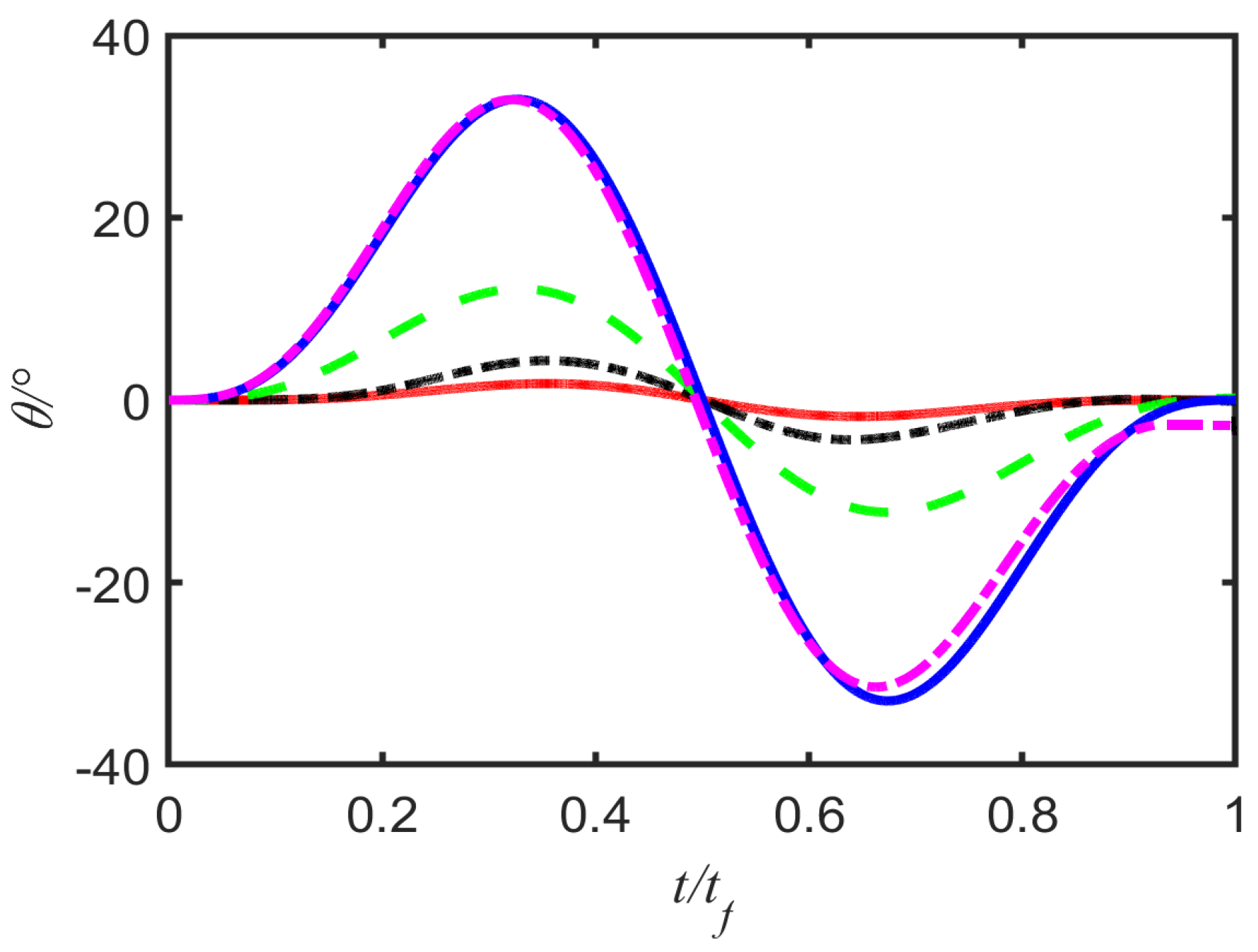
4. Optimal Control for Time Minimization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Fradkov, A.L. Swinging control of nonlinear oscillations. Int. J. Control 1996, 64, 1189–1202. [Google Scholar] [CrossRef]
- Chidambaram, M.; Jyothi, S.N. Control of Non-linear Unstable systems with Input Multiplicity. Indian Chem. Eng. 2001, 43, 99–100. [Google Scholar] [CrossRef]
- Kosmatopoulos, E.B. Control of Unknown Nonlinear Systems with Efficient Transient Performance Using Concurrent Exploitation and Exploration. IEEE Trans. Neural Netw. 2010, 21, 1245–1261. [Google Scholar] [CrossRef] [PubMed]
- Gorban, A.N.; Tyukin, I.Y.; Nijmeijer, H. Further Results on Lyapunov-Like Conditions of Forward Invariance and Boundedness for a Class of Unstable Systems. arXiv 2014, arXiv:2014.7039621. [Google Scholar]
- Wang, Q.D.; Jing, Y.W.; Zhang, S.Y. Global Adaptive Output Tracking Control of a Class of Nonlinear Systems. J. Northeast. Univ. 2004, 25, 817–820. [Google Scholar] [CrossRef]
- Greiner, M.; Bloch, I.; Hänsch, T.W.; Esslinger, T. Magnetic transport of trapped cold atoms over a large distance. Phys. Rev. A 2001, 63, 031401(R). [Google Scholar] [CrossRef]
- Schmid, S.; Thalhammer, G.; Winkler, K.; Lang, F.; Denschlag, J.H. Long distance transport of ultracold atoms using a 1D optical lattice. New J. Phys. 2006, 8, 159. [Google Scholar] [CrossRef]
- Dickinson, A.G.; Denker, J.S. Adiabatic dynamic logic. IEEE J. Solid-State Circuits 1995, 30, 311–315. [Google Scholar] [CrossRef]
- Gustavson, T.L.; Chikkatur, A.P.; Leanhardt, A.E.; Görlitz, A.; Gupta, S.; Pritchard, D.E.; Ketterle, W. Transport of Bose-Einstein condensates with optical tweezers. Am. Phys. Soc. 2001, 88, 020401. [Google Scholar] [CrossRef]
- Couvert, A.; Kawalec, T.; Reinaudi, G.; Guéry-Odelin, D. Optimal transport of ultracold atoms in the non-adiabatic regime. Europhys. Lett. 2008, 83, 13001. [Google Scholar] [CrossRef]
- Hauck, S.H.; Stojanovic, V.M. Coherent atom transport via enhanced shortcuts to adiabaticity: Double-well optical lattice. Phys. Rev. Appl. 2021, 18, 014016. [Google Scholar] [CrossRef]
- González-Resines, S.; Guéry-Odelin, D.; Tobalina, A.; Lizuain, I.; Torrontegui, E.; Muga, J. Invariant-based inverse engineering of crane control parameters. Phys. Rev. Appl. 2017, 8, 054008. [Google Scholar] [CrossRef]
- Hao, S.-Y.; Chen, Y.; Kang, Y.-E. Constructing shortcuts to the adiabatic passage for implementation of nongeomeric phase gates in a two-atom system. Laser Phys. Lett. 2021, 18, 10. [Google Scholar] [CrossRef]
- Klostermann, T.; Cabrera, C.R.; von Raven, H.; Wienand, J.F.; Schweizer, C.; Bloch, I.; Aidelsburger, M. Fast long-distance transport of cold cesium atoms. Phys. Rev. A 2021, 105, 4. [Google Scholar] [CrossRef]
- Chen, X.; Torrontegui, E.; Stefanatos, D.; Li, J.S.; Muga, J.G. Optimal trajectories for efficient atomic transport without final excitation. Phys. Rev. A 2011, 84, 043415. [Google Scholar] [CrossRef]
- Nakamura, K.; Matrasulov, J.; Izumida, Y. Fast-forward approach to stochastic heat engine. Phys. Rev. E 2020, 102, 012129. [Google Scholar] [CrossRef]
- Murphy, M.; Jiang, L.; Khaneja, N.; Calarco, T. High-fidelity fast quantum transport with imperfect controls. Phys. Rev. Appl. 2008, 79, 020301. [Google Scholar] [CrossRef]
- Ibáñez, S.; Martínez-Garaot, S.; Chen, X.; Torrontegui, E.; Muga, J.G. Shortcuts to adiabaticity for non-Hermitian systems. Phys. Rev. Appl. 2011, 84, 023415. [Google Scholar] [CrossRef]
- Torrontegui, E.; Lizuain, I.; González-Resines, S.; Tobalina, A.; Ruschhaupt, A.; Kosloff, R.; Muga, J.G. Energy consumption for shortcuts to adiabaticity. Phys. Rev. A 2017, 96, 022133. [Google Scholar] [CrossRef]
- Hauck, S.H.; Alber, G.; Stojanovic, V.M. Single-atom transport in optical conveyor belts: Enhanced shortcuts-to-adiabaticity approach. Phys. Rev. Appl. 2021, 104, 053110. [Google Scholar] [CrossRef]
- Pu, J.; Shi, J.; Wu, R.; Chen, X. Beam splitter in optical waveguides designed by shortcuts to adiabaticity. J. Shanghai Univ. 2016, 22, 545–551. [Google Scholar] [CrossRef]
- Zhao, Z.-Y.; Yan, R.-Y.; Feng, Z.-B. Shortcut-based quantum gates on superconducting qubits in circuit QED. Chin. Phys. B 2021, 30, 088501. [Google Scholar] [CrossRef]
- Guéry-Odelin, D.; Ruschhaupt, A.; Kiely, A.; Torrontegui, E.; Martínez-Garaot, S.; Muga, J.G. Shortcuts to adiabaticity: Concepts, methods, and applications. Rev. Mod. Phys. 2019, 91, 045001. [Google Scholar] [CrossRef]
- Kazutaka, T. Shortcuts to adiabaticity for quantum annealing. Phys. Rev. A 2017, 95, 012309. [Google Scholar] [CrossRef]
- Abah, O.; Puebla, R.; Paternostro, M. Quantum state engineering by shortcuts-to-adiabaticity in interacting spin-boson systems. Phys. Rev. Lett. 2019, 124, 180401. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Chen, X.; Guéry-Odelin, D. Fast and optimal transport of atoms with nonharmonic traps. Phys. Rev. A 2015, 92, 043410. [Google Scholar] [CrossRef]
- Simsek, S.; Mintert, F. Quantum invariant-based control of interacting trapped ions. arXiv 2021, arXiv:2112.13905. [Google Scholar]
- Martínez-Garaot, S.; Tseng, S.-Y.; Muga, J.G. Compact and high conversion efficiency mode-sorting asymmetric Y junction using shortcuts to adiabaticity. Opt. Lett. 2014, 39, 2306–2309. [Google Scholar] [CrossRef]
- Li, Y.; Xin, T.; Qiu, C.; Li, K.; Liu, G.; Li, J.; Wan, Y.; Lu, D. Dynamical-invariant-based holonomic quantum gates: Theory and experiment—ScienceDirect. Fundam. Res. 2022, 3, 229–236. [Google Scholar] [CrossRef]
- Demirplak, M.; Rice, S.A. On the consistency, extremal, and global properties of counterdiabatic fields. J. Chem. Phys. 2008, 129, 165. [Google Scholar] [CrossRef]
- Chen, X.; Lizuain, I.; Ruschhaupt, A.; Guéry-Odelin, D.; Muga, J.G. Shortcut to adiabatic passage in two-and three-level atoms. Phys. Rev. Lett. 2010, 105, 123003. [Google Scholar] [CrossRef] [PubMed]
- Demirplak, M.; Rice, S.A. Assisted adiabatic passage revisited. J. Phys. Chem. B 2005, 109, 6838–6844. [Google Scholar] [CrossRef] [PubMed]
- Del Campo, A. Shortcuts to adiabaticity by counterdiabatic driving. Phys. Rev. Lett. 2013, 111, 501–509. [Google Scholar] [CrossRef]
- Berry, M.V. Transitionless quantum driving. J. Phys. A Math. Theor. 2009, 42, 365303. [Google Scholar] [CrossRef]
- Chen, Y.-H.; Xia, Y.; Wu, Q.-C.; Huang, B.-H.; Song, J. Method for constructing shortcuts to adiabaticity by a substitute of counterdiabatic driving terms. Phys. Rev. A 2016, 93, 052109. [Google Scholar] [CrossRef]
- Chen, X.; Torrontegui, E.; Muga, J.G. Lewis-Riesenfeld invariants and transitionless quantum driving. Phys. Rev. A 2011, 83, 062116. [Google Scholar] [CrossRef]
- Pontryagin, L.S. Mathematical Theory of Optimal Processes; Routledge: Abingdon-on-Thames, UK, 2018. [Google Scholar] [CrossRef]
- Bulirsch, R.; Montrone, F.; Pesch, H.J. Abort landing in the presence of windshear as a minimax optimal control problem, part 2: Multiple shooting and homotopy. J. Optim. Theory Appl. 1991, 70, 223–254. [Google Scholar] [CrossRef]
- Bellman, R.; Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mischenko, E.F. The Mathematical Theory of Optimal Processes. Math. Comput. 1965, 19, 159. [Google Scholar] [CrossRef]
- Fujimoto, K.; Sugie, T. Canonical transformation and stabilization of generalized hamiltonian systems. Syst. Control Lett. 2001, 42, 217–227. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, L.; Kong, Q. Optimal Shortcuts to Adiabatic Control by Lagrange Mechanics. Entropy 2023, 25, 719. https://doi.org/10.3390/e25050719
Ma L, Kong Q. Optimal Shortcuts to Adiabatic Control by Lagrange Mechanics. Entropy. 2023; 25(5):719. https://doi.org/10.3390/e25050719
Chicago/Turabian StyleMa, Lanlan, and Qian Kong. 2023. "Optimal Shortcuts to Adiabatic Control by Lagrange Mechanics" Entropy 25, no. 5: 719. https://doi.org/10.3390/e25050719
APA StyleMa, L., & Kong, Q. (2023). Optimal Shortcuts to Adiabatic Control by Lagrange Mechanics. Entropy, 25(5), 719. https://doi.org/10.3390/e25050719