
Comparative Study on Feature Extraction of Marine Background Noise Based on Nonlinear Dynamic Features

Abstract
:1. Introduction
2. Nonlinear Dynamic Features
2.1. Entropy
- (1)
- For a specific time series , given an embedding dimension , a set of vector sequences can be obtained, where can be expressed as:
- (2)
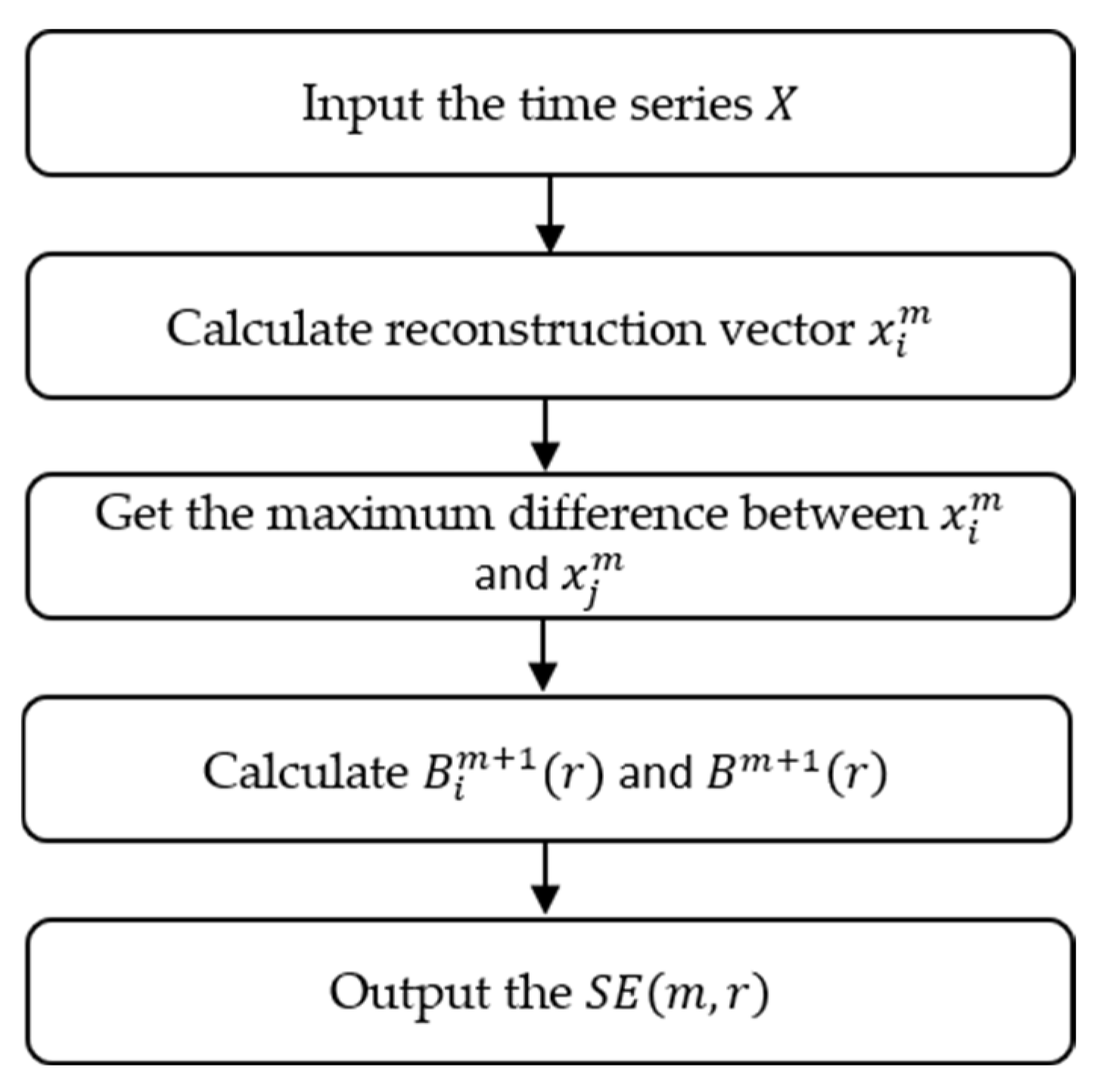
- Define the absolute value of the maximum difference between the distance between vectors and :where .
- (3)
- Given , record the standard deviation of as , count the number of with as , , and define .
- (4)
- is defined as:
- (5)
- Increase the embedding dimension to , and repeat the above steps to obtain and . The final expression of SE is:where the calculation flow chart of SE is shown in Figure 1.
- (1)
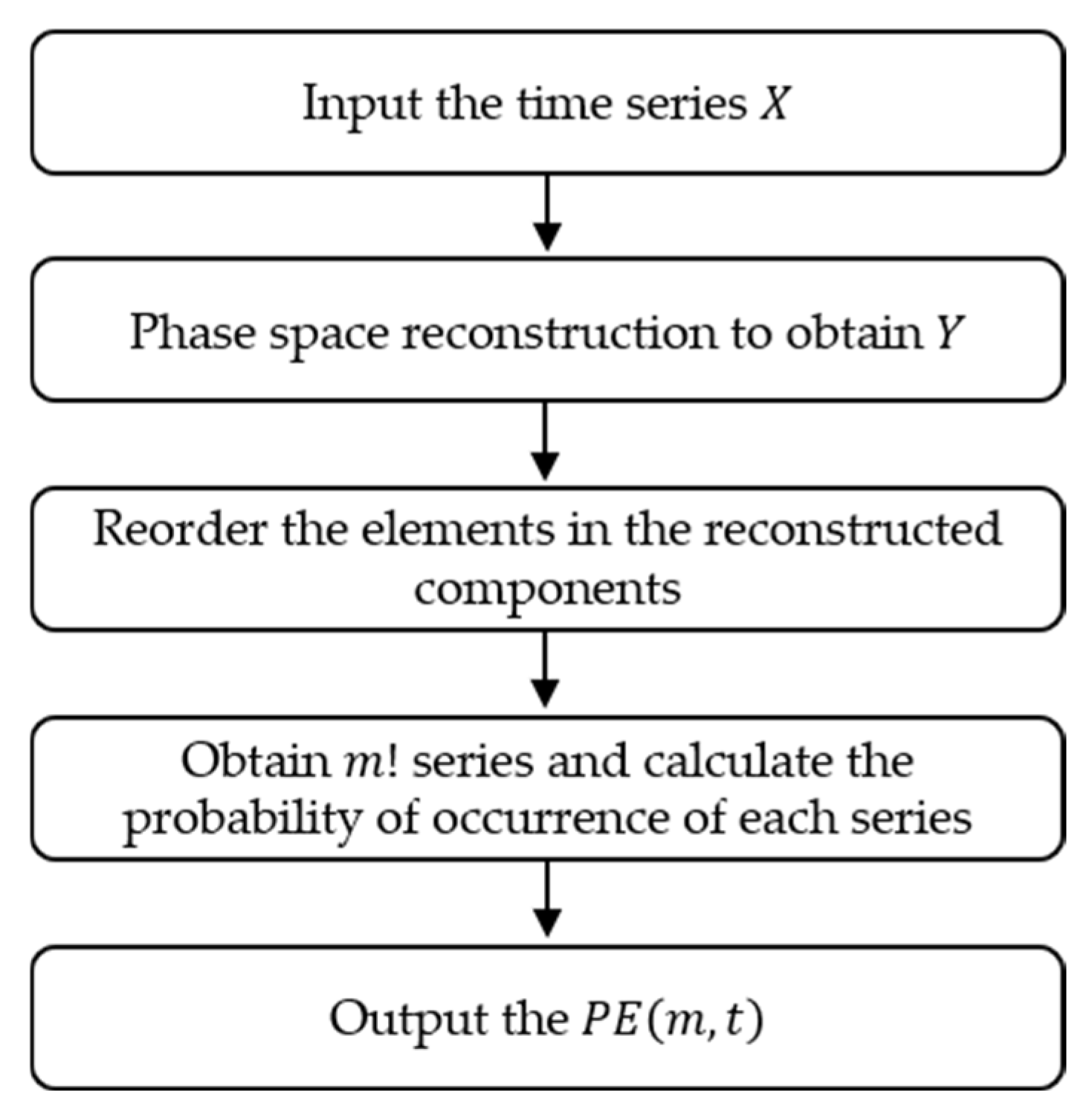
- For the given time series , phase space reconstruction is performed to obtain :where is the embedding dimension, is the delay time, and .
- (2)
- Reorder the elements in each reconstructed component in ascending order to obtain:
- (3)
- According to the Shannon entropy theorem, the expression of PE can be expressed as:where Figure 2 displays the calculation flow chart of PE.
2.2. Lempel–Ziv Complexity
- (1)
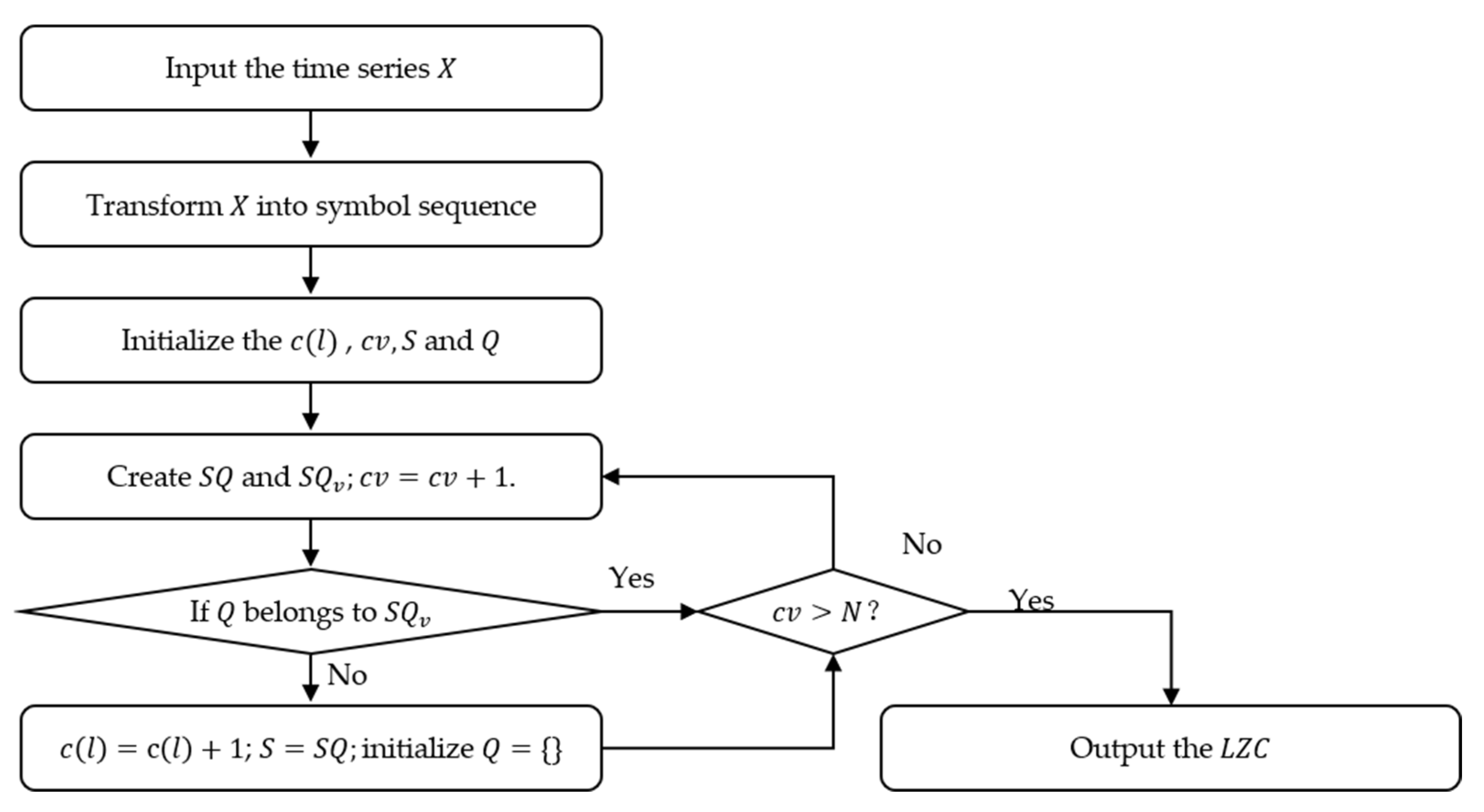
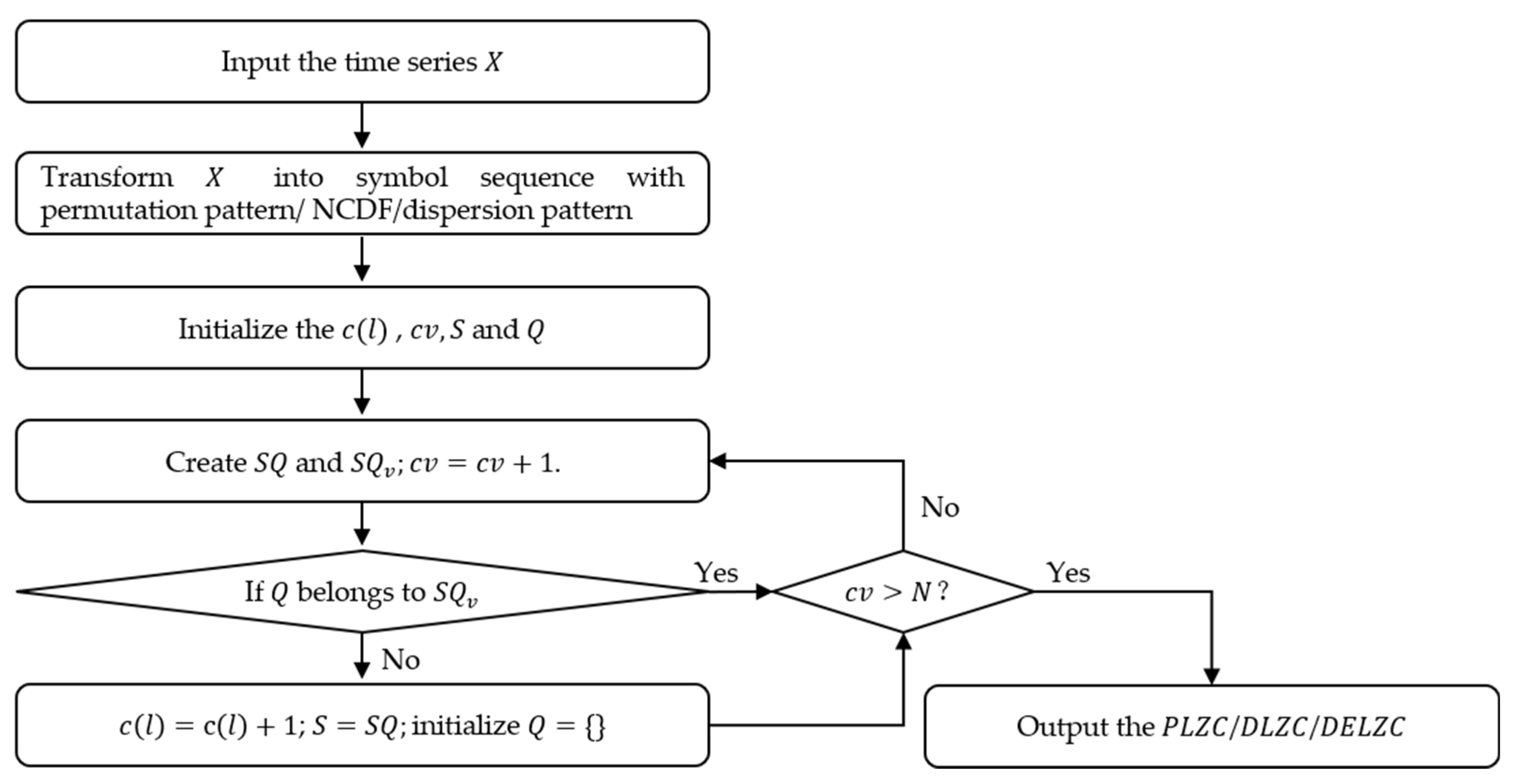
- For time series , each element is converted to 0 or 1 by the following formula:where is the mean value of sequence , then the symbol sequence is obtained.
- (2)
- Initialize the complexity index and count value to 0 and 1, respectively, and let and denote the first and second elements in . By merging and into , is obtained by removing the last element of .
- (3)
- Judge whether belongs to . If so, update by adding the next character. Otherwise, , , and initialize . For each judgment that is performed, the updated and updated are obtained in the same way as Step (2), and .
- (4)
- Judge whether exceeds ; if not, return to Step (3); otherwise, the calculation of complexity is completed.
- (5)
- The normalized result of LZC can be expressed as:
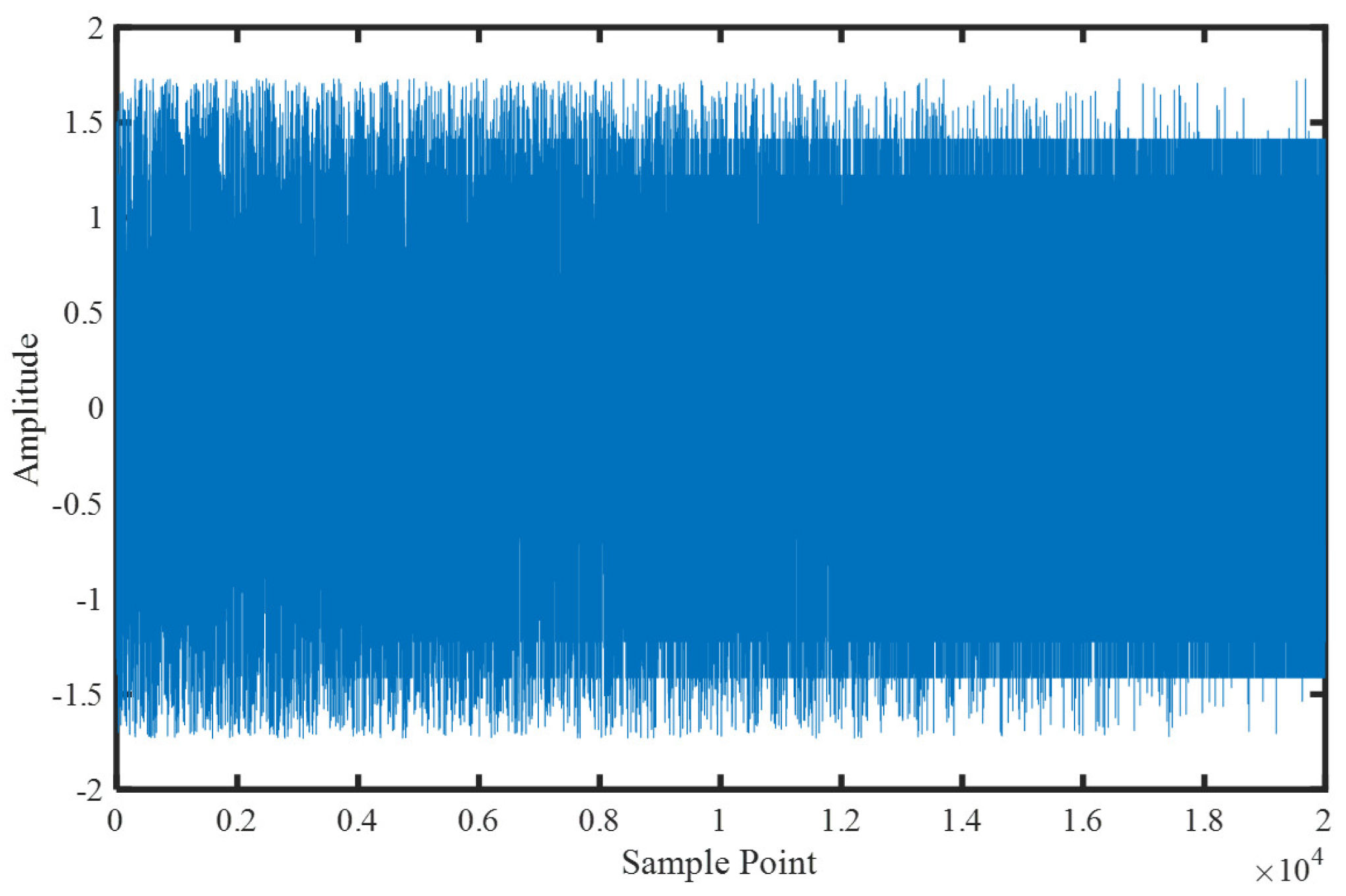
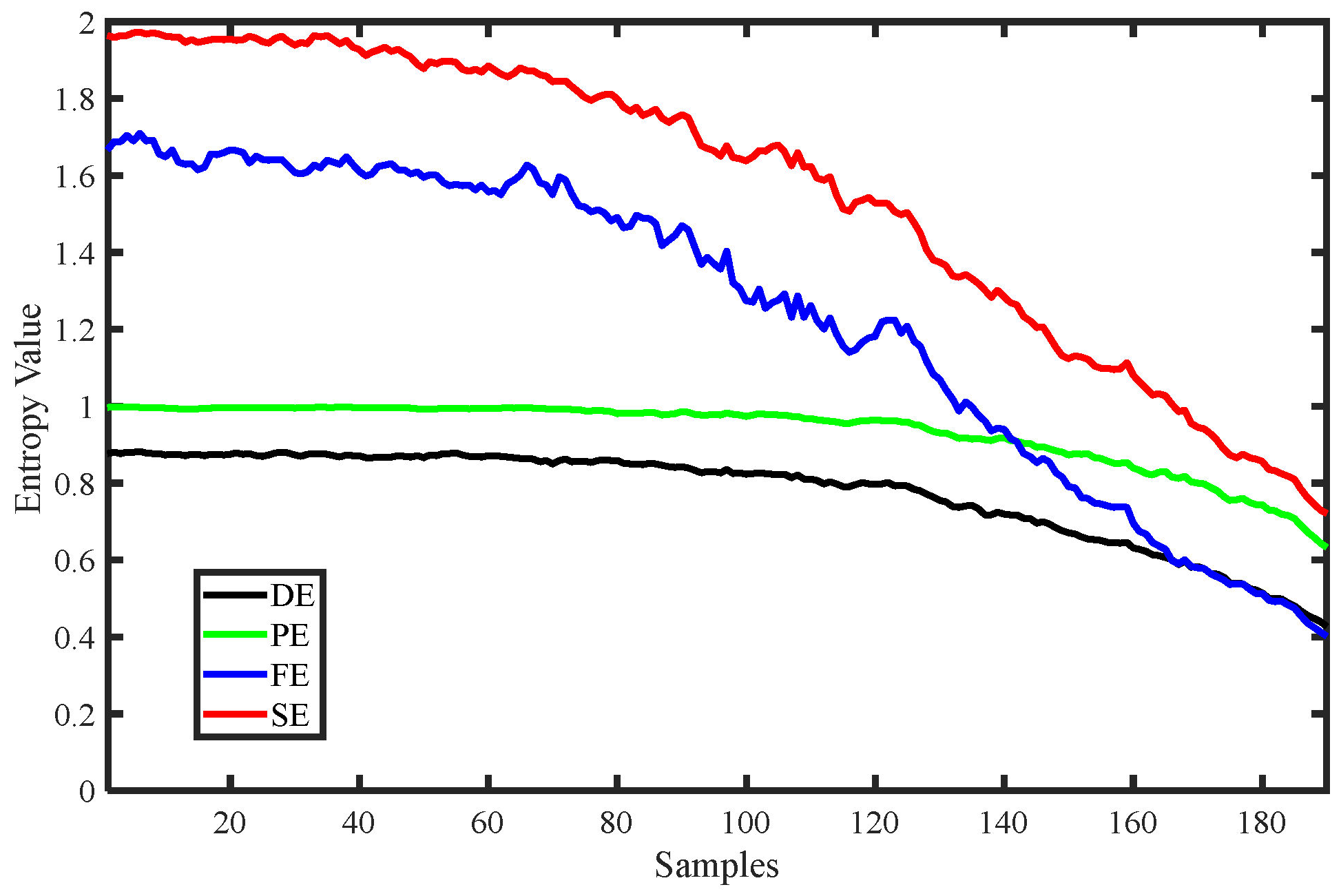
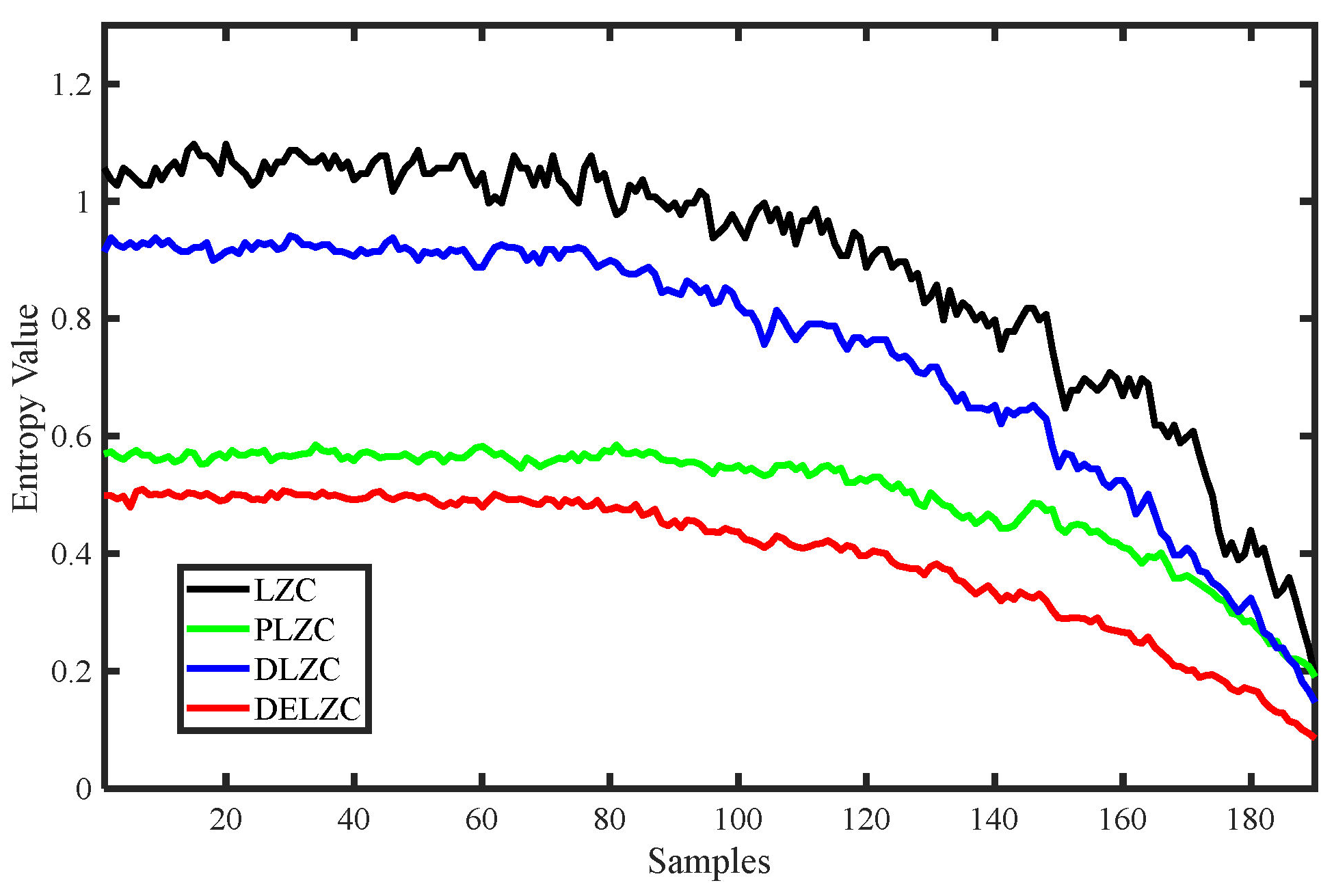
2.3. Simulation Experiment Verification
3. Feature Extraction of MBN Based on Nonlinear Dynamic Features
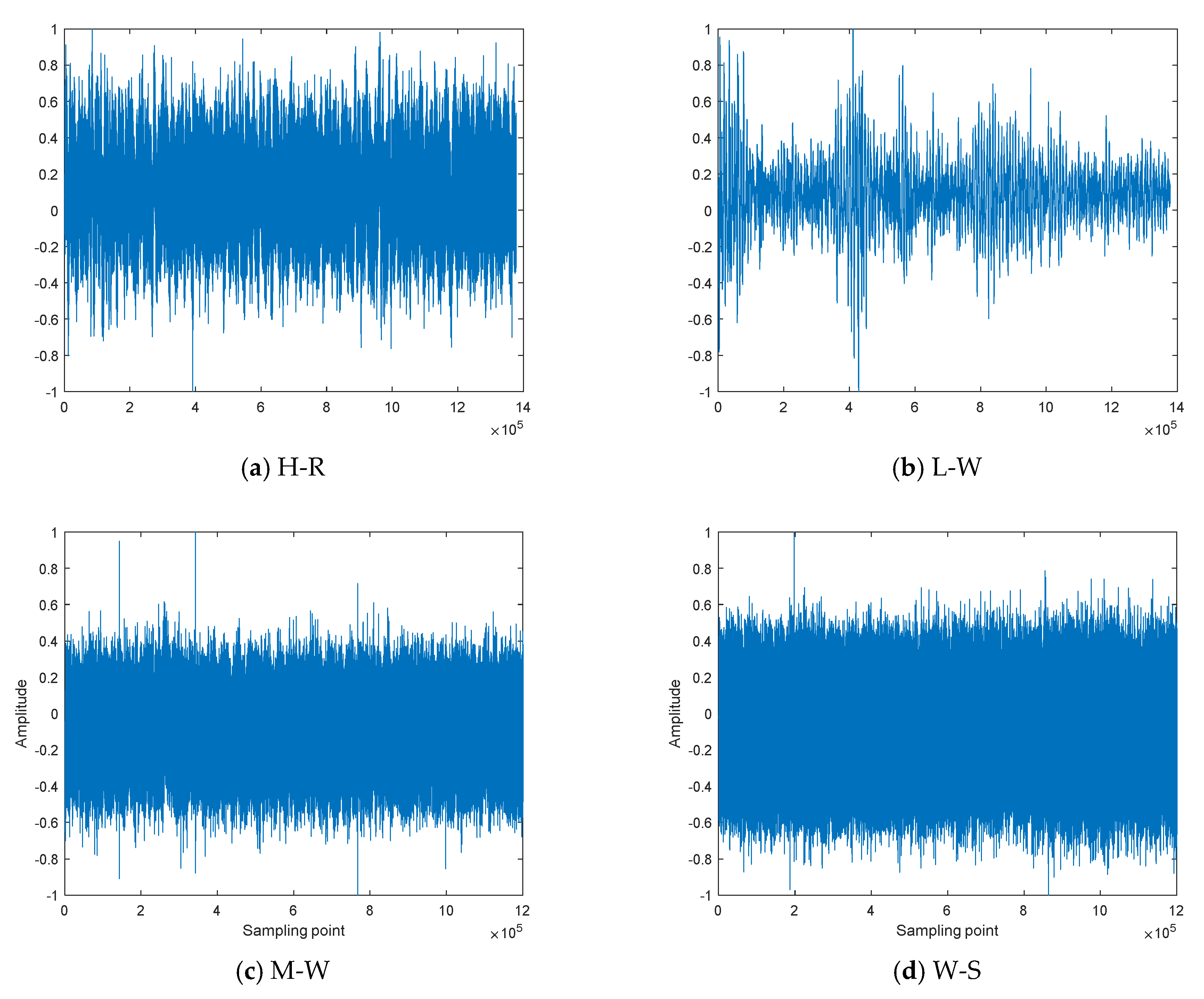
3.1. Marine Background Noise
3.2. Feature Extraction and Analysis Based on Entropy
3.2.1. Parameter Setting of Entropy Features
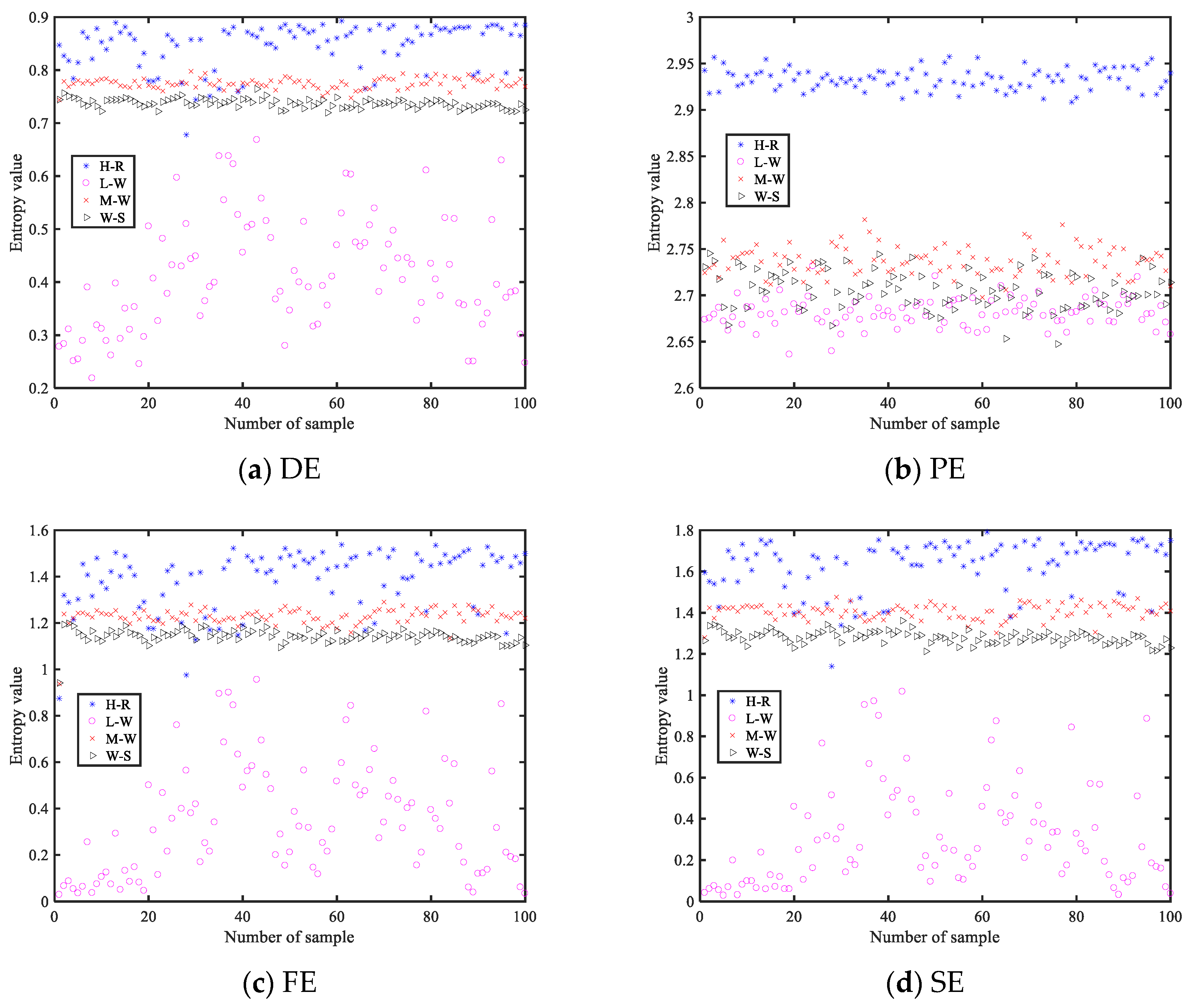
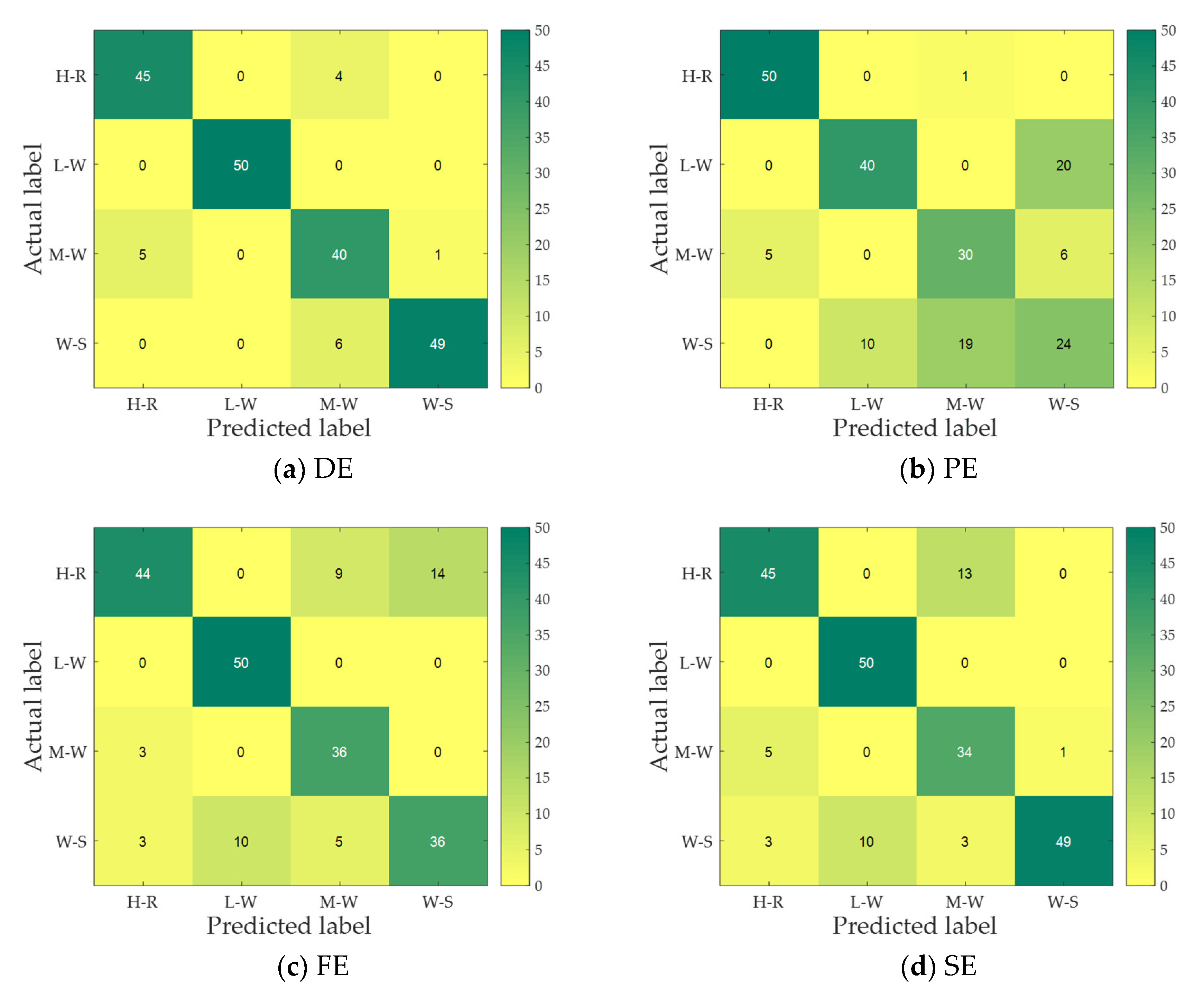
3.2.2. Single Feature Extraction and Classification
3.2.3. Multiple Feature Extraction and Classification
3.3. Feature Extraction and Analysis Based on LZC
3.3.1. Parameter Setting of LZC-Based Features
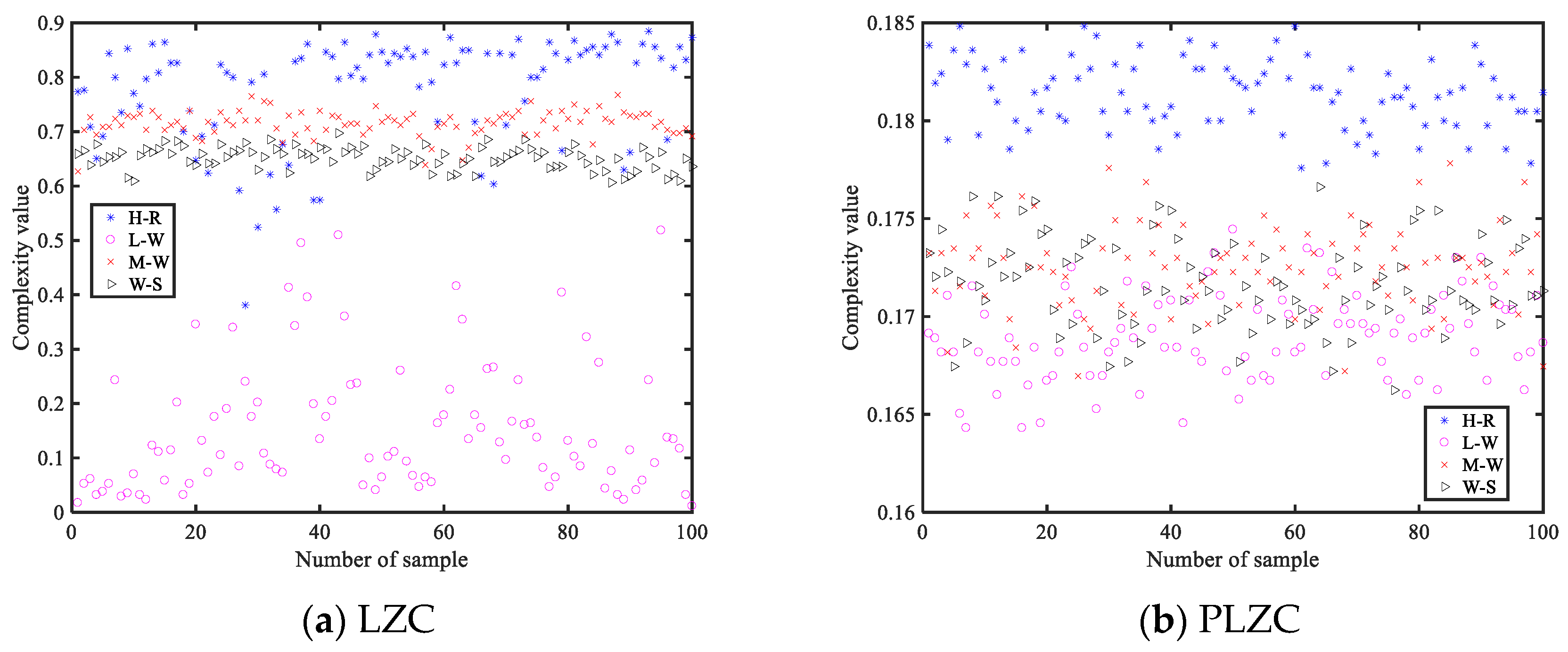
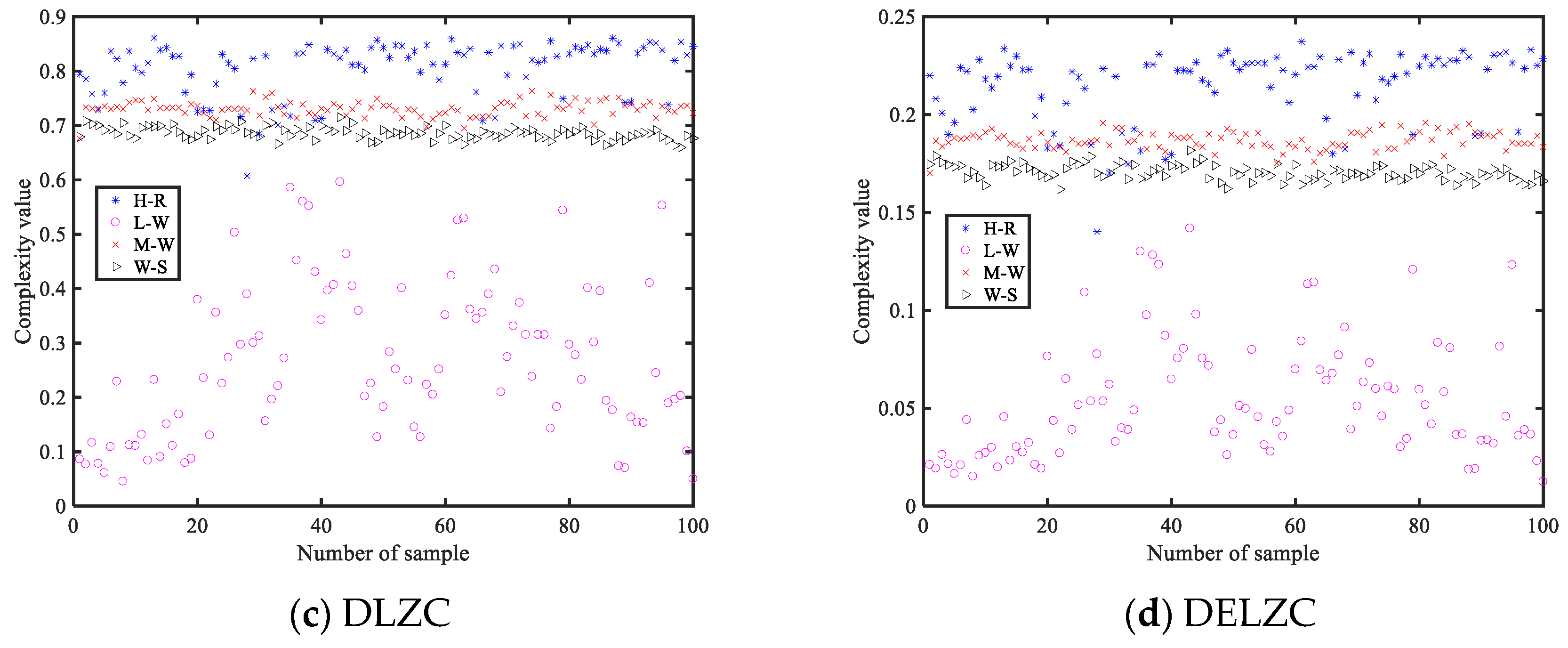
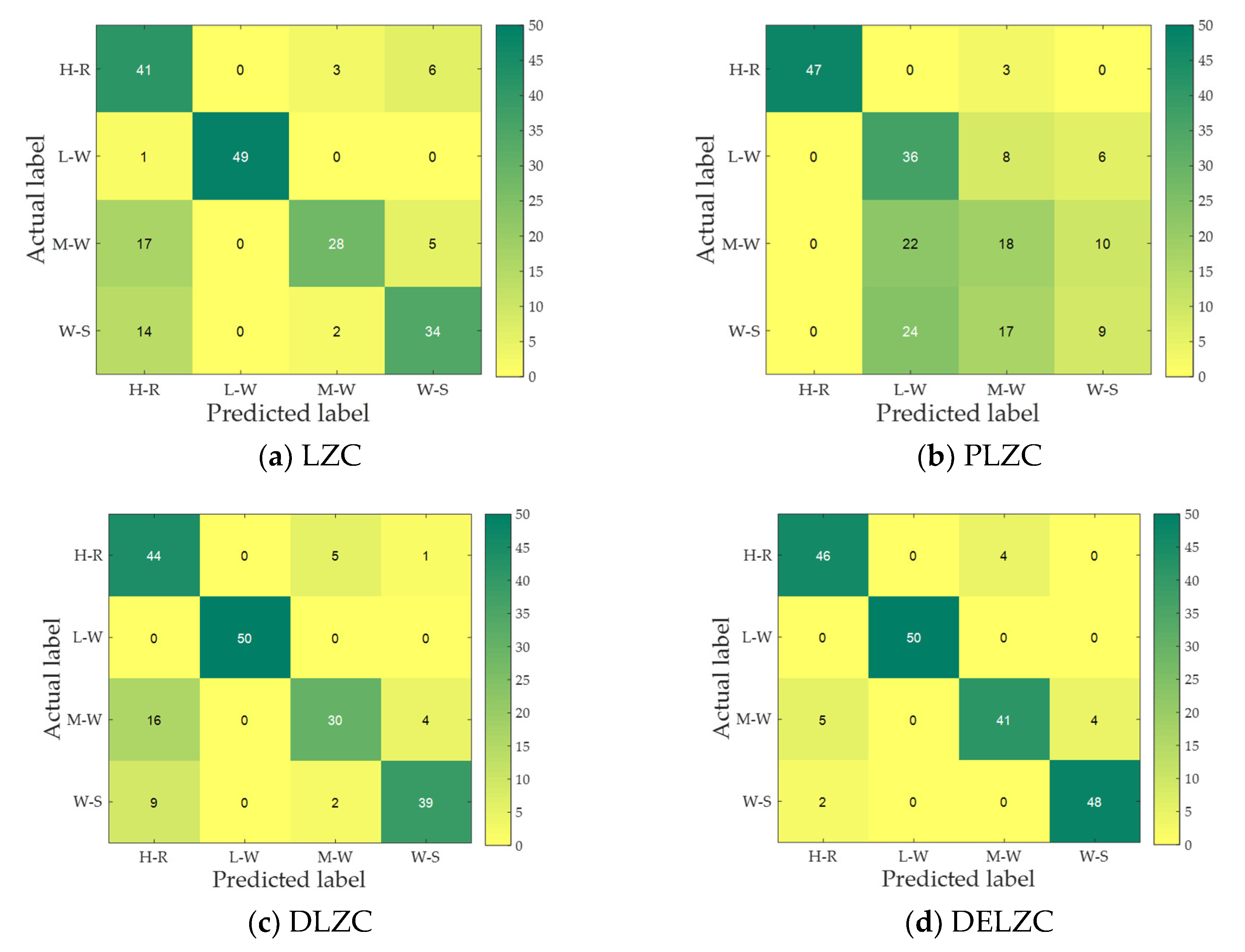
3.3.2. Feature Extraction and Classification
3.3.3. Multiple Feature Extraction and Classification
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dietrich, W.; Max, S. Propeller cavitation noise and background noise in the sea. Ocean Eng. 2016, 120, 116–121. [Google Scholar]
- Wenz, G.M. Acoustic ambient noise in the ocean: Spectra and sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Lu, L. The design and implementation of ocean ambient noise acquisition system based on the underwater glider. J. Acoust. Soc. Am. 2016, 140, 3409. [Google Scholar] [CrossRef]
- Wang, Q. Underwater bottom still mine classification using robust time-frequency feature and relevance vector machine. Int. J. Comput. Math. 2009, 86, 794–806. [Google Scholar] [CrossRef]
- Rioul, O.; Vetterli, M. Wavelets and signal processing. IEEE Signal Process. Mag. 1991, 8, 14–38. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Geng, B.; Jiao, S. Fractional Order Fuzzy Dispersion Entropy and Its Application in Bearing Fault Diagnosis. Fractal Fract. 2022, 6, 544. [Google Scholar] [CrossRef]
- Wu, Y.; Li, Y.; Chen, J. Prediction of underwater acoustic signal based on neural network. Microprocessors 2006, 27, 47–48. [Google Scholar]
- Li, Y.; Jiao, S.; Geng, B.; Zhang, Q.; Zhang, Y. A comparative study of four nonlinear dynamic methods and their applications in classification of ship-radiated noise. Def. Technol. 2022, 18, 183–193. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, X.; Tang, B.; Ning, F.; Lou, Y. Feature extraction methods of ship-radiated noise: From single feature of multi-scale dispersion Lempel-Ziv complexity to mixed double features. Appl. Acoust. 2022, 199, 109032. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, K.; An, Y. An Integrated Multitasking Intelligent Bearing Fault Diagnosis Scheme Based on Representation Learning Under Imbalanced Sample Condition. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, J.; Li, M. A Parallel Hybrid Neural Network With Integration of Spatial and Temporal Features for Remaining Useful Life Prediction in Prognostics. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Jiao, S. SO-slope entropy coupled with SVMD: A novel adaptive feature extraction method for ship-radiated noise. Ocean Eng. 2023, 280, 114677. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, S.; Geng, B. Refined composite multiscale fluctuation-based dispersion Lempel–Ziv complexity for signal analysis. ISA Trans. 2022, 133, 273–284. [Google Scholar] [CrossRef]
- Li, Y.; Geng, B.; Tang, B. Simplified coded dispersion entropy: A nonlinear metric for signal analysis. Nonlinear Dyn. 2023, 111, 9327–9344. [Google Scholar] [CrossRef]
- Shannon, C. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- Pincus, S. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Z.; Xie, H. Characterization of Surface EMG Signal Based on Fuzzy Entropy. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 266–272. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation Entropy: A Natural Complexity Measure for Time Series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A Measure for Time-Series Analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Cui, L.; Gong, X.; Zhang, J. Double-dictionary matching pursuit for fault extent evaluation of rolling bearing based on the Lempel-Ziv complexity. J. Sound Vibr. 2016, 385, 372–388. [Google Scholar] [CrossRef]
- Lempel, A.; Ziv, J. On the complexity of finite sequences, Inform. Theory IEEE Trans 1976, 22, 75–81. [Google Scholar] [CrossRef]
- Mekler, A.; Borisenok, S. The revealing of periods in Lempel-Ziv complexity of EEG signal. Int. J. Psychophysiol. 2018, 131, S116. [Google Scholar] [CrossRef]
- Simons, S.; Abásolo, D. Distance-Based Lempel–Ziv Complexity for the Analysis of Electroencephalograms in Patients with Alzheimer’s Disease. Entropy 2017, 19, 129. [Google Scholar] [CrossRef]
- Bai, Y.; Liang, Z.; Li, X. Permutation Lempel-Ziv complexity measure of electroencephalogram in GABAergic an aesthetics. Physiol. Meas. 2015, 36, 2483–2501. [Google Scholar] [CrossRef]
- Shumbayawonda, E.; Tosun, P.; Fernández, A.; Hughes, M.; Abásolo, D. Complexity Changes in Brain Activity in Healthy Ageing: A Permutation Lempel-Ziv Complexity Study of Magnetoencephalograms. Entropy 2018, 20, 506. [Google Scholar] [CrossRef]
- Mao, X.; Shang, P.; Xu, M. Measuring time series based on multiscale dispersion Lempel-Ziv complexity and dispersion entropy plane. Chaos Solitons Fractals 2020, 137, 109868. [Google Scholar] [CrossRef]
- Jiao, S.; Geng, B.; Li, Y. Comparative Study of Feature Extraction and Classification Based on Dispersion Lempel-Ziv Complexity. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 35, e2949. [Google Scholar]
- Li, Y.; Geng, B.; Jiao, S. Dispersion entropy-based Lempel-Ziv complexity: A new metric for signal analysis. Chaos Solitons Fractals 2022, 161, 112400. [Google Scholar] [CrossRef]
- National Park Service. Available online: https://www.nps.gov/glba/learn/nature/soundclips.htm (accessed on 29 December 2022).
- Zhang, J.; Li, X.; Tian, J.; Jiang, Y.; Luo, H.; Yin, S. A variational local weighted deep sub-domain adaptation network for remaining useful life prediction facing cross-domain condition. Reliab. Eng. Syst. Saf. 2023, 231, 108986. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X.; Tian, J.; Luo, H.; Yin, S. An integrated multi-head dual sparse self-attention network for remaining useful life prediction. Reliab. Eng. Syst. Safety 2023, 233, 109096. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Parameter | |||
|---|---|---|---|---|
| DE | ||||
| PE | ||||
| FE | ||||
| SE | ||||
| Feature | Parameter | ||
|---|---|---|---|
| LZC | |||
| PLZC | |||
| DLZC | |||
| DELZC | |||
| Feature | Category of Signal | Average Recognition Rate | |||
|---|---|---|---|---|---|
| H-R | L-W | M-W | W-S | ||
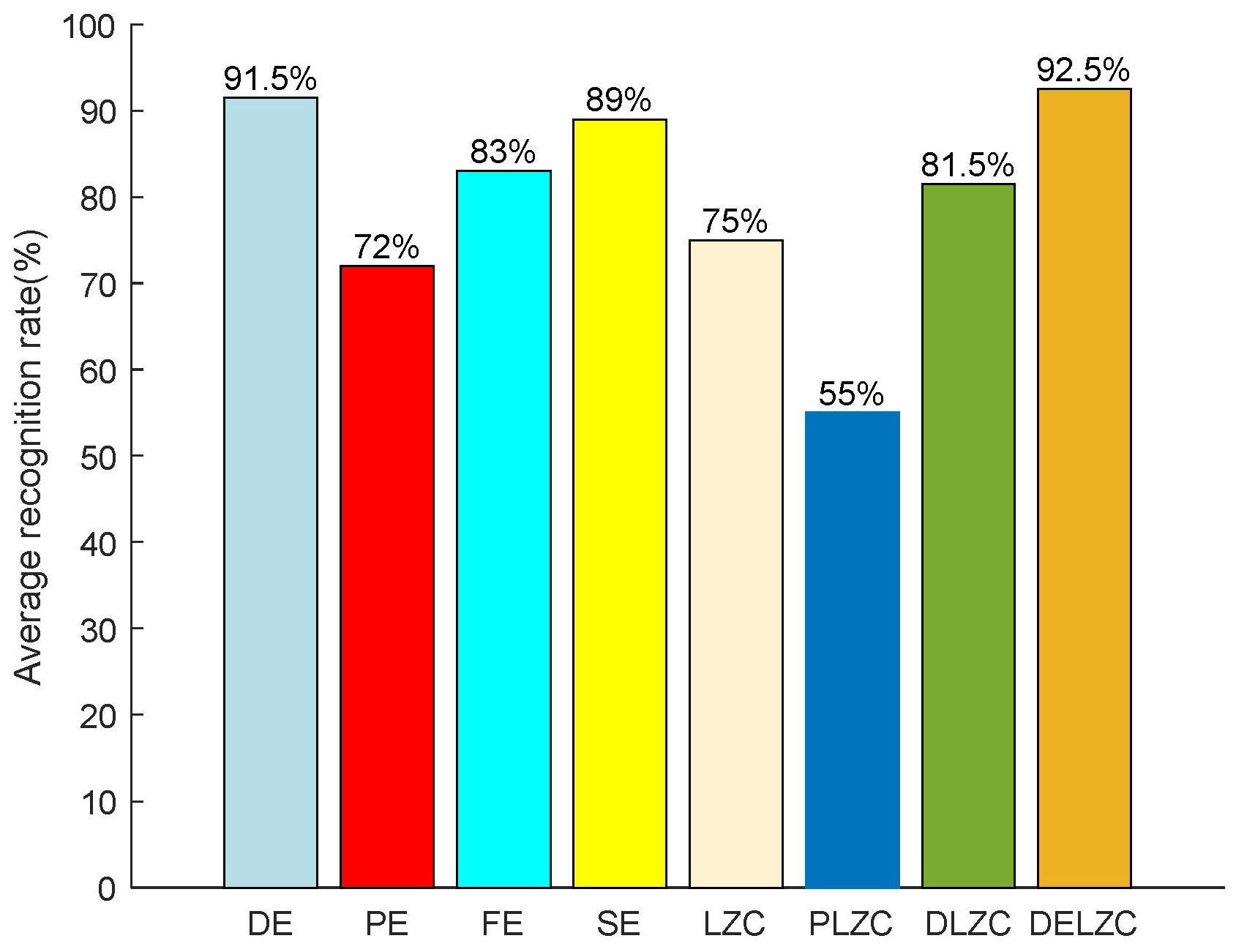
| DE | 88.0% | 100.0% | 80.0% | 98.0% | 91.5% |
| PE | 100.0% | 80.0% | 60.0% | 48.0% | 72.0% |
| FE | 88.0% | 100.0% | 72.0% | 72.0% | 83.0% |
| SE | 90.0% | 100.0% | 68.0% | 98.0% | 89.0% |
| Number of Extracted Features | |||
|---|---|---|---|
| Two | Three | Four | |
| Highest recognition rate | 97.5% | 97.5% | 96.5% |
| Selected features | DE, PE | DE, FE, SE | All features |
| Feature | Category of Signal | Average Recognition Rate | |||
|---|---|---|---|---|---|
| H-R | L-W | M-W | W-S | ||
| LZC | 82.0% | 98.0% | 56.0% | 64.0% | 75.0% |
| PLZC | 94.0% | 72.0% | 36.0% | 18.0% | 55.0% |
| DLZC | 88.0% | 100% | 60.0% | 78.0% | 81.5% |
| DELZC | 92.0% | 100% | 82.0% | 96.0% | 92.5% |
| Number of Extracted Features | |||
|---|---|---|---|
| Two | Three | Four | |
| Highest recognition rate | 95.5% | 95.0% | 95.5% |
| Selected features | LZC, DELZC | LZC, PLZC, DLZC | All features |
| Number of Extracted Features | |||||||
|---|---|---|---|---|---|---|---|
| Two | Three | Four | Five | Six | Seven | Eight | |
| Highest recognition rate | 98.0% | 98.0% | 98.0% | 98.0% | 98.0% | 97.5% | 96.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, G.; Wang, Y.; Wang, F. Comparative Study on Feature Extraction of Marine Background Noise Based on Nonlinear Dynamic Features. Entropy 2023, 25, 845. https://doi.org/10.3390/e25060845
Ji G, Wang Y, Wang F. Comparative Study on Feature Extraction of Marine Background Noise Based on Nonlinear Dynamic Features. Entropy. 2023; 25(6):845. https://doi.org/10.3390/e25060845
Chicago/Turabian StyleJi, Guanni, Yu Wang, and Fei Wang. 2023. "Comparative Study on Feature Extraction of Marine Background Noise Based on Nonlinear Dynamic Features" Entropy 25, no. 6: 845. https://doi.org/10.3390/e25060845
APA StyleJi, G., Wang, Y., & Wang, F. (2023). Comparative Study on Feature Extraction of Marine Background Noise Based on Nonlinear Dynamic Features. Entropy, 25(6), 845. https://doi.org/10.3390/e25060845